Introduction:
Robot Dynamics and Model-based Control

MIT 6.832: Underactuated Robotics
Spring 2021, Lecture 1
Follow live at https://slides.com/russtedrake/spring21-lec01/live
(or later at https://slides.com/russtedrake/spring21-lec01)

Course Info
Dongchan Lee
AJ Miller


Eric Chen
Remote Teaching
I want lectures to be interactive.
(synchronous will be better!)
Piazza (sign up if you're registered)
Email: underactuated-staff@mit.edu
Open to everyone / anywhere:
- Watch + comment on YouTube
- Annotations on the "textbook"
Remote Teaching
I want lectures to be interactive.
(synchronous will be better!)
Please keep your video ON.
Please ask questions!
- Voice is OK.
- Chat is OK, too.
- You will not show up on YouTube.

Remote Teaching
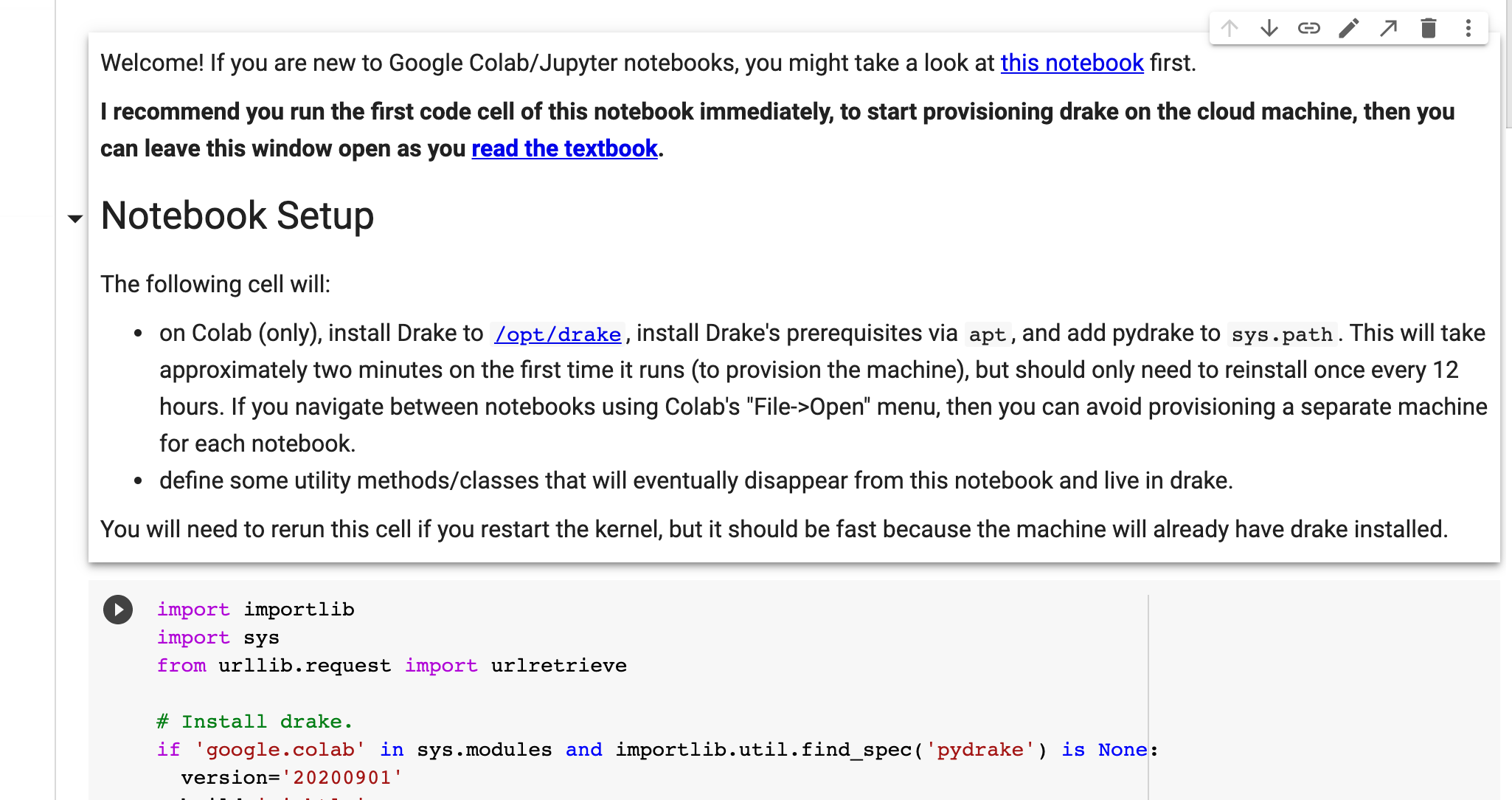
I hope to lecture better than I have before
(by injecting code into your browser!)
Simulation experiments during lecture.
I'm very open to suggestions / changes
Please forgive my experiments, and give me feedback!
The plan for this week (Experiment #1)
- Right now: Short synchronous lecture (~30 min)
- Asynchronous:
- Lecture 1 video + notes
- Lecture 2 video + notes
- Thursday: You will each be assigned (via announcement on piazza) to one 30 min slot during normal lecture time.
- Interactive session (nonlinear dynamics of Hopfield Networks)
- Ratio will be 5-8 students to one staff
- If you cannot make the synchronous session, then it will be on your pset.
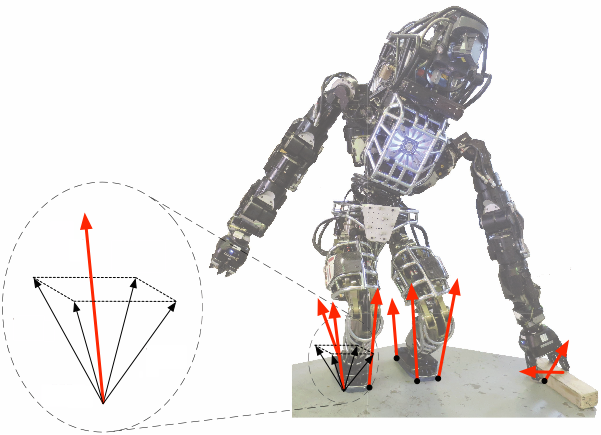
"It's very impressive, but too bad there is no learning..."
-- almost every computer scientist that I've talked to.
The plan for this term
Cover most of the core topics from underactuated robotics.
But take a deep dive into the topic of learning models and planning / control with learned models. New lectures on
- Multibody parameter estimation
- Learning linear models (subspace identification, DMD)
- Planning and control with deep network models
- State estimation / task-relevant models
- Identification of hybrid systems (e.g. with contact)
The plan for this term
Cover most of the core topics from underactuated robotics.
But take a deep dive into the topic of learning models and planning / control with learned models.
a.k.a. "Model-based Reinforcement Learning"
- Particular emphasis on algorithms that exploit structure in your model.
Model-based control
First concern:
Models based on physics may be limited.
Second concern:
Robot won't continue to improve.
What is a (dynamic) model?
System
State-space
Auto-regressive (eg. ARMAX)
input
output
state
noise/disturbances
parameters
Lagrangian mechanics,
Recurrent neural networks (e.g. LSTM), ...
Feed-forward networks
(e.g. \(y_n\)= image)
What is a (dynamic) model?
System
State-space
Auto-regressive (eg. ARMAX)
input
output
Model "class" vs model "instance"
- \(f\) and \(g\) describe the model class.
- with \(\theta\) describes a model instance.
"Deep models vs Physics-based models?" is about model class:
Should we prefer writing \(f\) and \(g\) using physics or deep networks (or both)?
Maybe not so different from
- should we use ReLU or \(\tanh\)?
- should we use LSTMs or Transformers?
The distinction is not about data...
Galileo, Kepler, Newton, Hooke, Coulomb, ...
were data scientists.
They fit very simple models to very noisy data.
Gave us a rich class of parametric models that we could fit to new data.
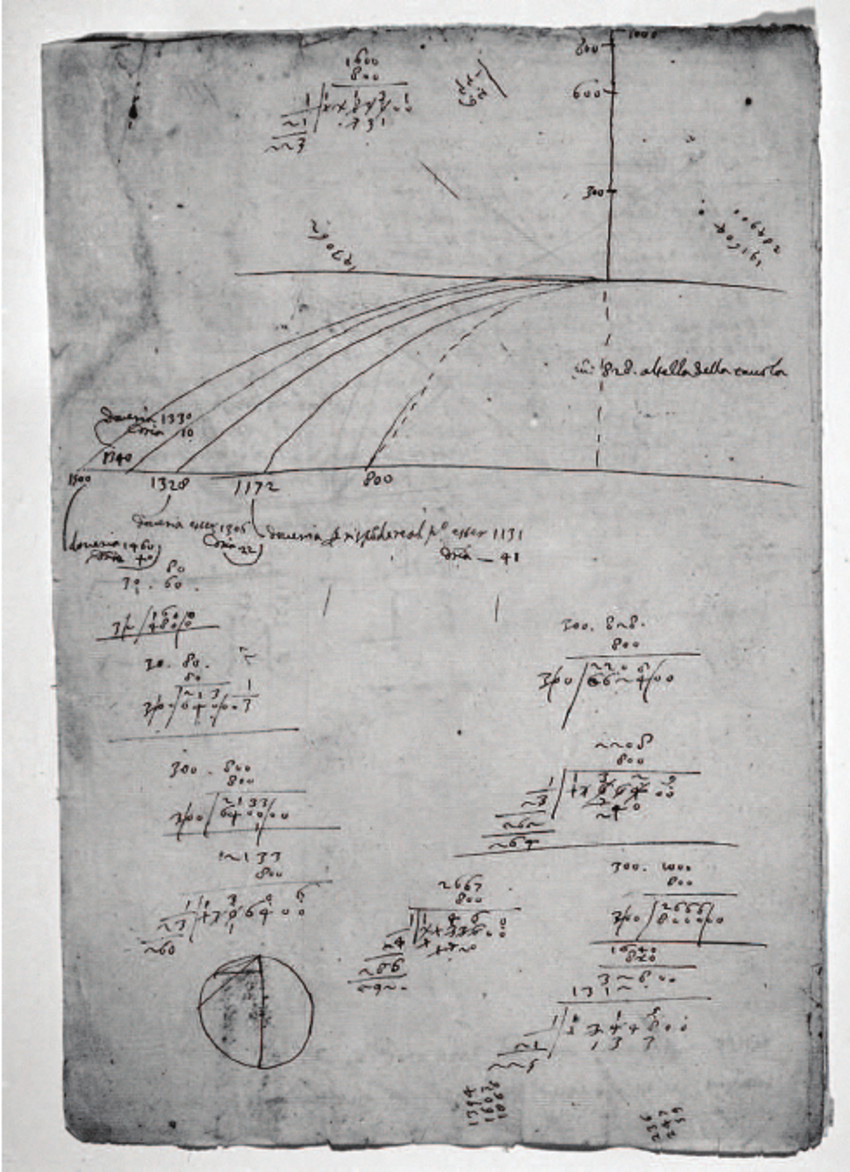
What if Newton had deep learning...?
Galileo's notes on projectile motion
Model-based control
First concern:
Models based on physics may be limited.
Second concern:
Robot won't continue to improve.
My view:
Each model class has advantages and challenges. Let's meet Tuesdays and Thursdays to discuss!
Logistics
- Students: Make sure you're on Piazza
- Watch this week's lecture videos (ideally before Thursday)
- Read/comment on the lecture notes
- Assignment 1 released tomorrow
- Due next Wed.
- ~5 PSets throughout the class (approximately biweekly), due Wednesday (any time).
- Midterm.
- Final project.
All details (incl. grading policy) are on the course website.