Simple models of running robots

MIT 6.832: Underactuated Robotics
Spring 2021, mini-Lecture 14

https://slides.com/russtedrake/spring21-lec14
Simple models
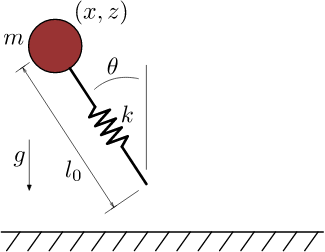
Spring-Loaded Inverted Pendulum (SLIP)
Leg Lab hopping robots
https://www.cs.cmu.edu/~hgeyer/Research_Principles.html
A few important general ideas
- Open-loop stability (generalizes passive stability)
- Feedback
- Step-to-step decisions (e.g. foot placement)
- Deadbeat control
G. Schultz and K. Mombaur, "Modeling and Optimal Control of Human-Like Running," in IEEE/ASME Transactions on Mechatronics, vol. 15, no. 5, pp. 783-792, Oct. 2010
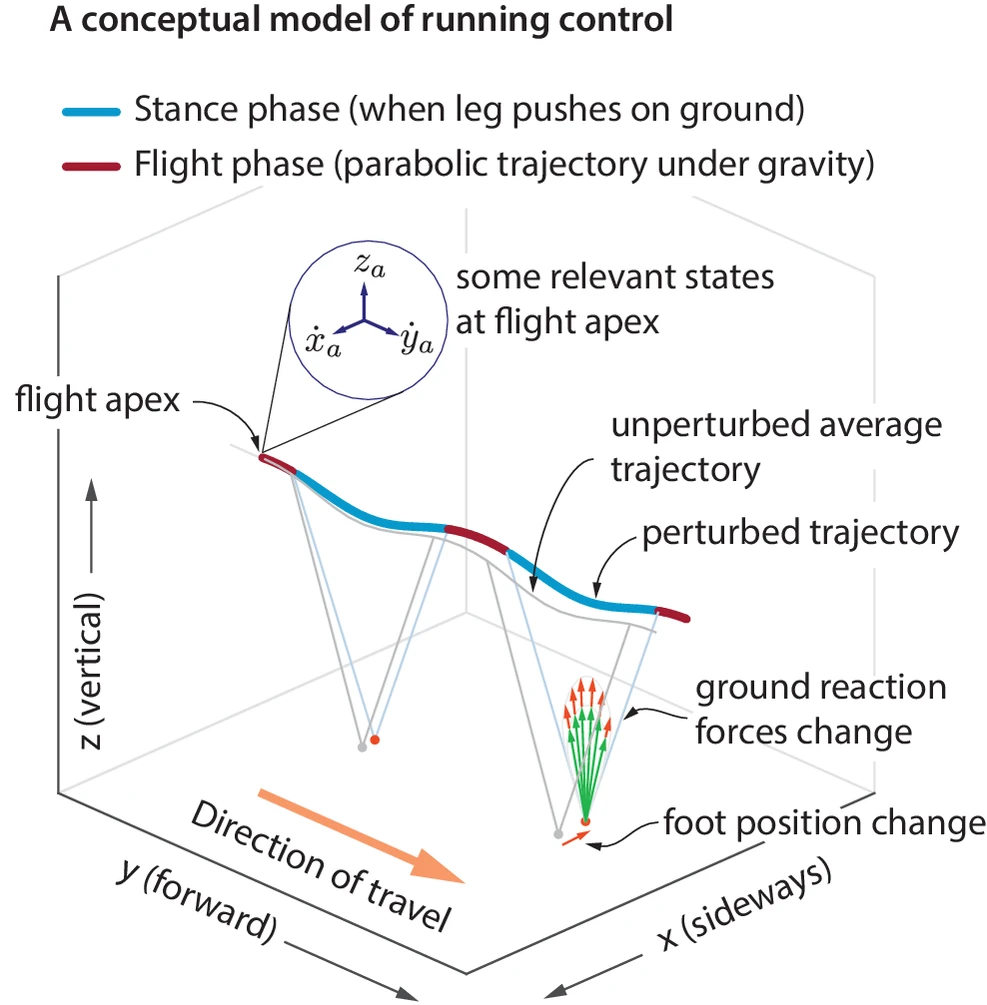
Seethapathi, Nidhi, and Manoj Srinivasan. "Step-to-step variations in human running reveal how humans run without falling." ELife 8 (2019): e38371.