Introduction:
Robot Dynamics and Model-based Control

MIT 6.832: Underactuated Robotics
Spring 2022, Lecture 1
Follow live at https://slides.com/d/jW5DEh4/live
(or later at https://slides.com/russtedrake/spring22-lec01)

Course Info
Alexandre Amice
Lujie Yang

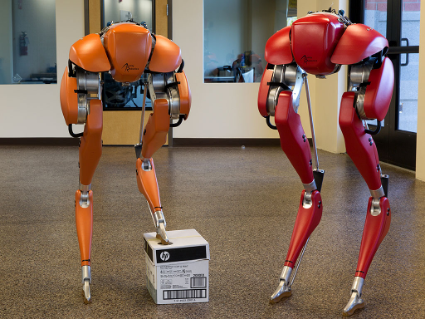

Cassie by Agility Robotics

T-HR3 by Toyota
ANYmal C by ANYbotics
Spot by Boston Dynamics

Troody by Pete Dilworth (MIT Leg Lab)
3D Passive-Dynamic Walker by Steve Collins and Andy Ruina (used w/ permission)
"Tour of the MIT Leg Lab"
(used w/ permission from Marc Raibert)
http://world.honda.com/ASIMO/video/
Goals for the class
- Bring together tools from:
- Nonlinear dynamics
- Optimization
- Control
- Machine learning
- Rigorous thinking about "model systems"
- Algorithmic toolkit for more complex systems
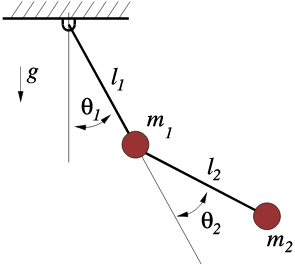
\begin{aligned}
(m_1 + m_2) l_1^2 \ddot{q}_1& + m_2 l_2^2 (\ddot{q}_1 + \ddot{q}_2) + m_2 l_1 l_2 (2 \ddot{q}_1 + \ddot{q}_2) c_2 \\
&- m_2 l_1 l_2 (2 \dot{q}_1 + \dot{q}_2) \dot{q}_2 s_2 + (m_1 + m_2) l_1 g s_1 + m_2 g l_2 s_{1+2} = \tau_1 \\
m_2 l_2^2 (\ddot{q}_1 + \ddot{q}_2)& + m_2 l_1 l_2 \ddot{q}_1 c_2 + m_2 l_1 l_2
\dot{q}_1^2 s_2 + m_2 g l_2 s_{1+2} = \tau_2
\end{aligned}
{\bf q} = \begin{bmatrix} \theta_1 \\ \theta_2 \end{bmatrix}
\frac{d}{dt}\frac{\partial L}{\partial \dot{q}_i} - \frac{\partial L}{\partial q_i}
= Q_i


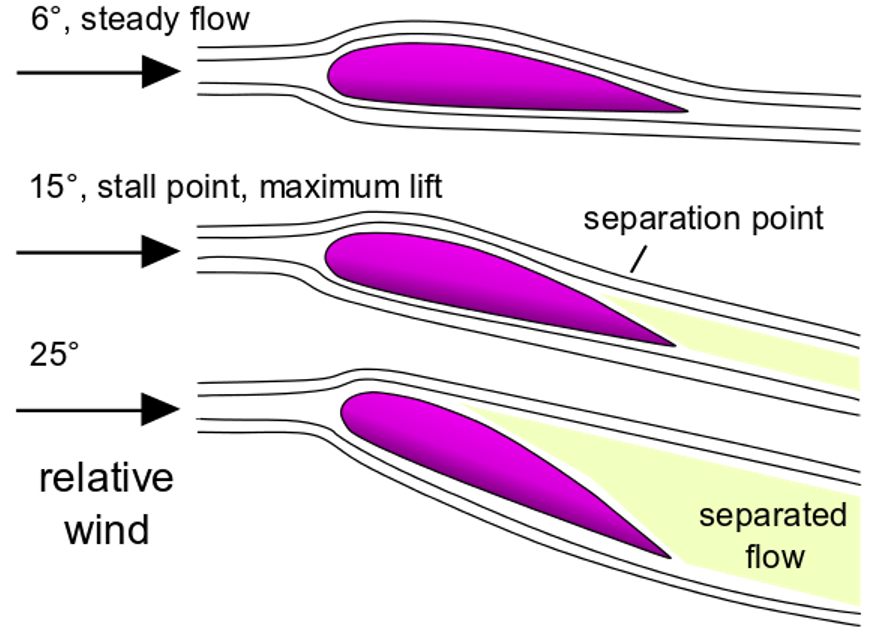

https://en.wikipedia.org/wiki/Stall_(fluid_dynamics)


http://mendobrew.com
http://www.davewalshphoto.com
J Exp Biol October 2012 vol. 215 no. 20 3603-3611
from George Lauder and Mike Triantafyllou (Liao et al, 2003)