Output Feedback

MIT 6.832: Underactuated Robotics
Spring 2022, Lecture 23
Follow live at https://slides.com/d/x3BZTS0/live
(or later at https://slides.com/russtedrake/spring22-lec23)

Image credit: Boston Dynamics

Acrobot LQR w/ Kalman Estimator (from encoders)
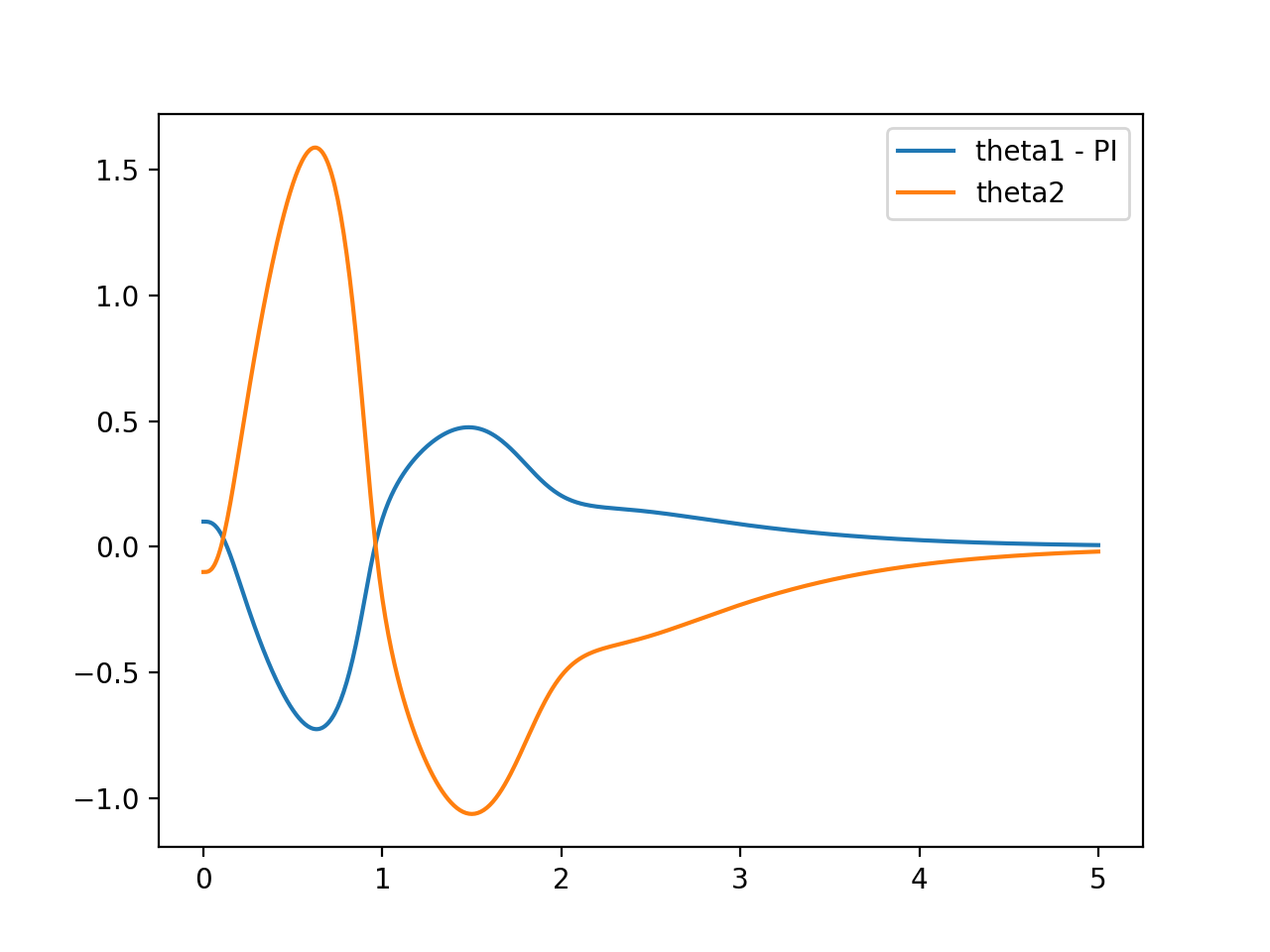
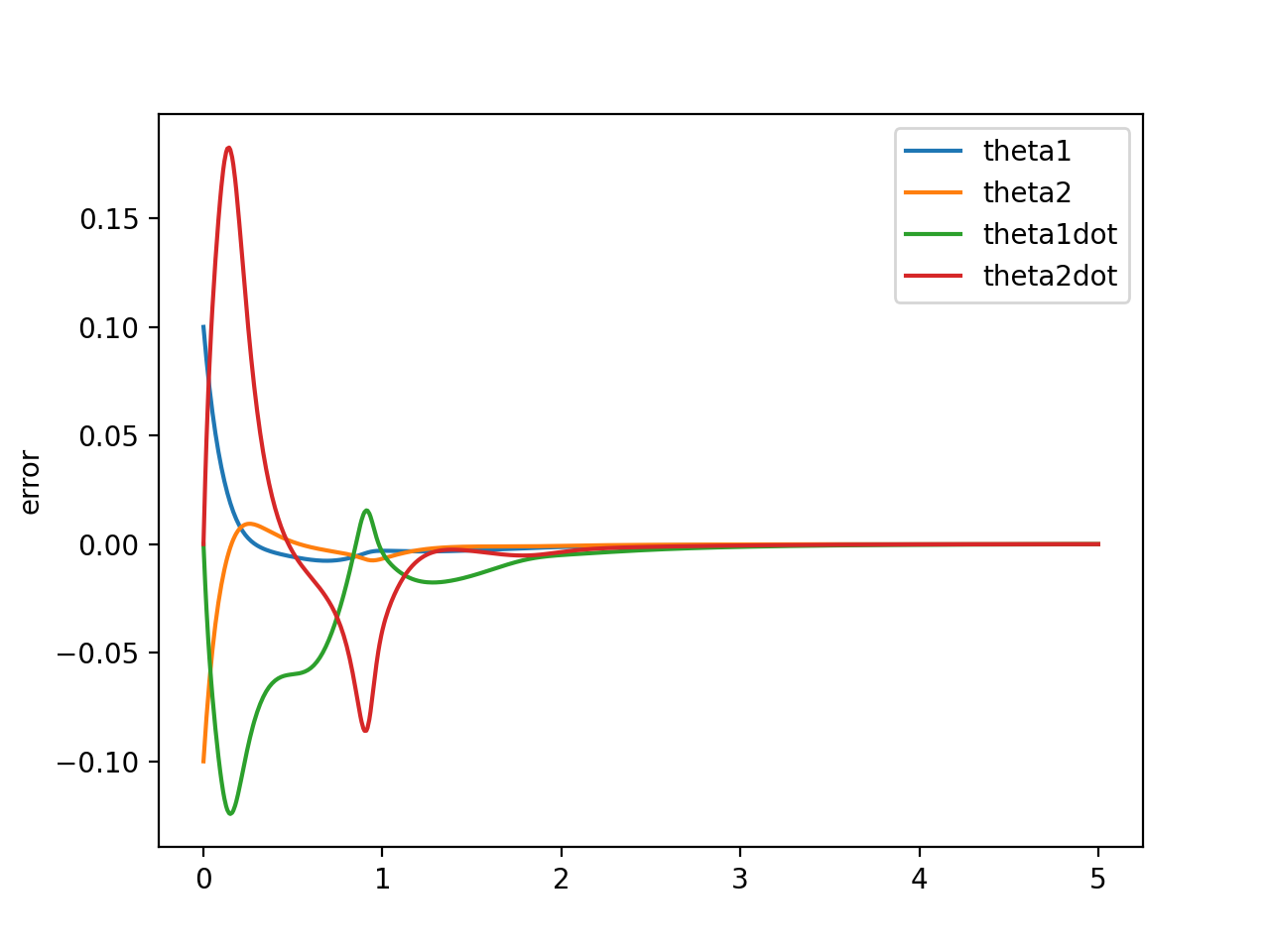
True acrobot state
Estimator error \( (\hat{x} - x) \)