Our automated future of mobility
Challenges in prediction and control
Sebastian Hörl
Kyko 2018
Magdeburg, 26 May 2018



The "street" in 1900
The "street" today
Rochester, NY ...
... 1950 ...
... and today
The street of tomorrow?
- Autonomous Mobility
- Mobility as a Service
- Mobility on Demand
- Electrification
- Aerial Mobility
The street of tomorrow?
- Autonomous Mobility
- Mobility as a Service
- Mobility on Demand
- Electrification
- Aerial Mobility
How do we predict the impacts?
How do we control the system?
The impact of control?
The impact of control?
User optimum vs. system optimum
20 min
5 min
Braess' Paradoxon
User optimum vs. system optimum
20 min
5 min
Braess' Paradoxon
User optimum vs. system optimum
16 min
7 min
9 min
Braess' Paradoxon
User optimum vs. system optimum
16 min
7 min
9 min
Braess' Paradoxon
+ x EUR ?
Signal control
Flow Maximization
Flow Imbalance
Waiting times
Dedicated bus lanes
Signal control
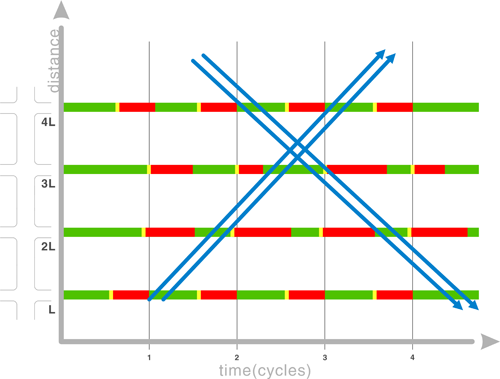
"Green waves"
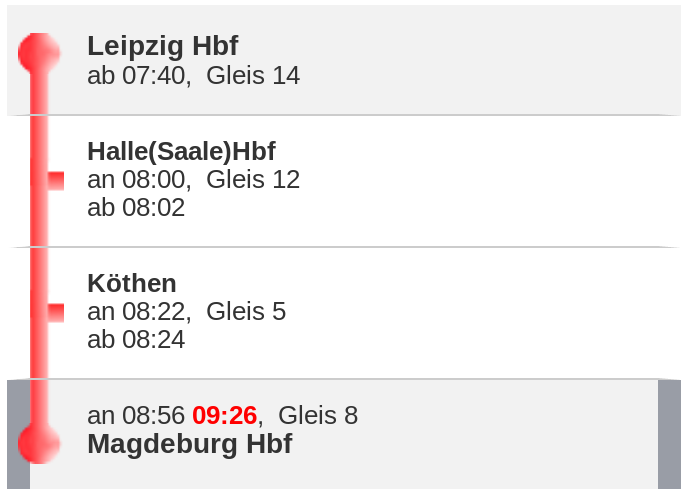
Scheduling
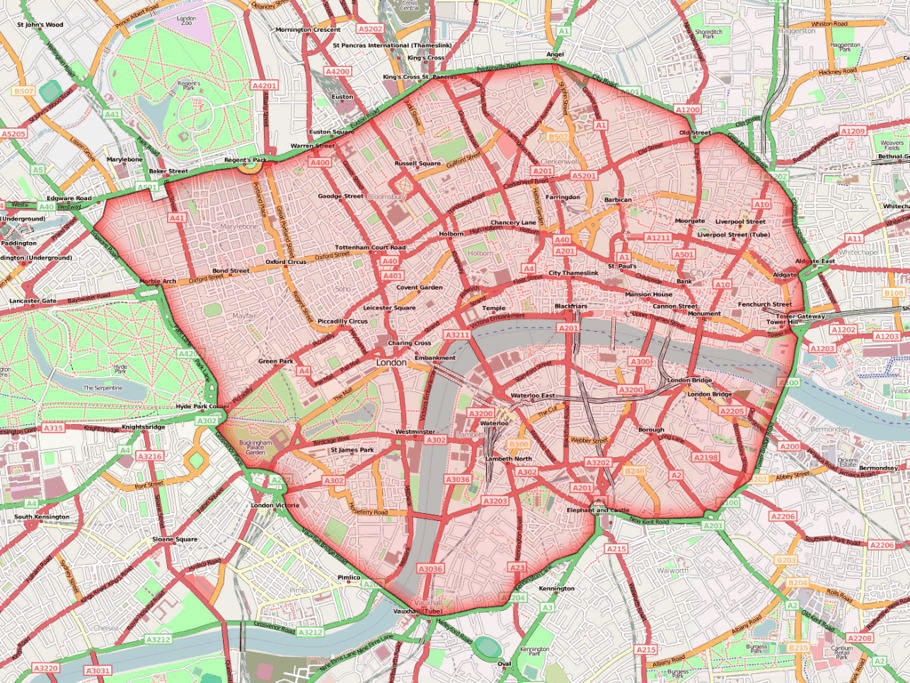
Mobility pricing: London
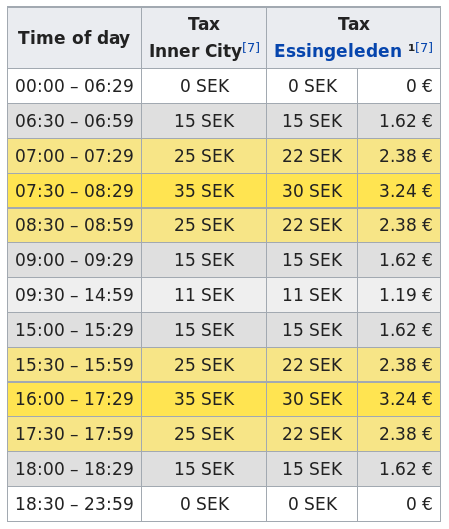
Mobility pricing: Stockholm

Problem: Real-world experiments
Solution: Simulations

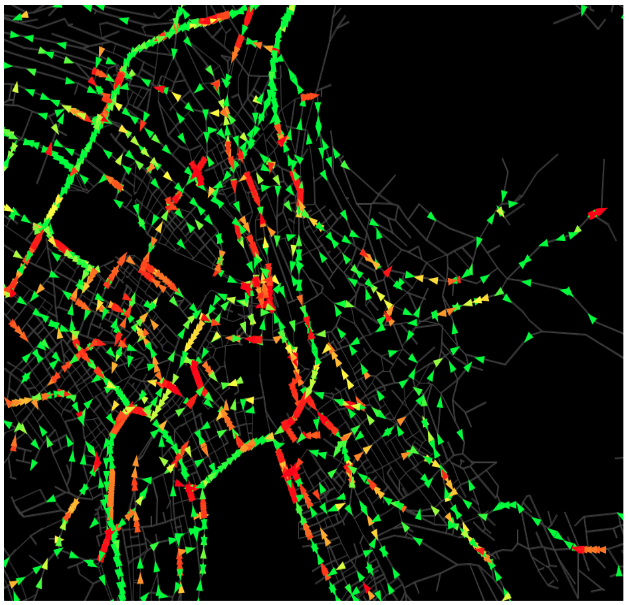
MATSim
Home
Work
Shop
Home
until 8am
9am to 6pm
6:15m to 6:30pm
from 6:45pm
walk
public
transport
walk
MATSim
Network simulation
Scoring of the plans
Selection and modification
Scenario
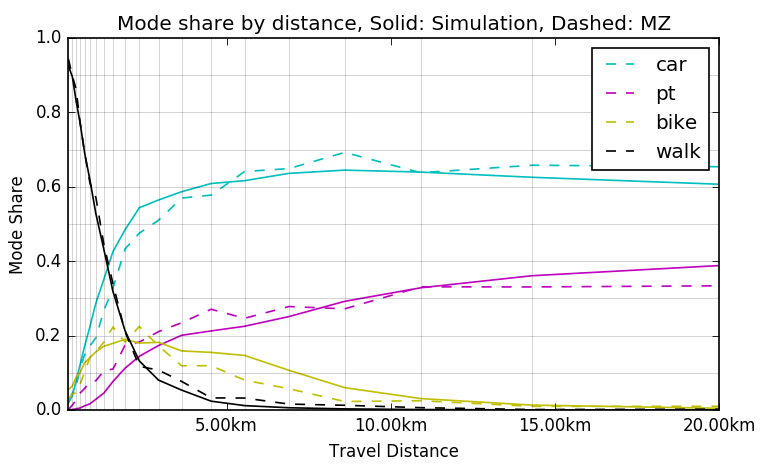
Scenario calibration
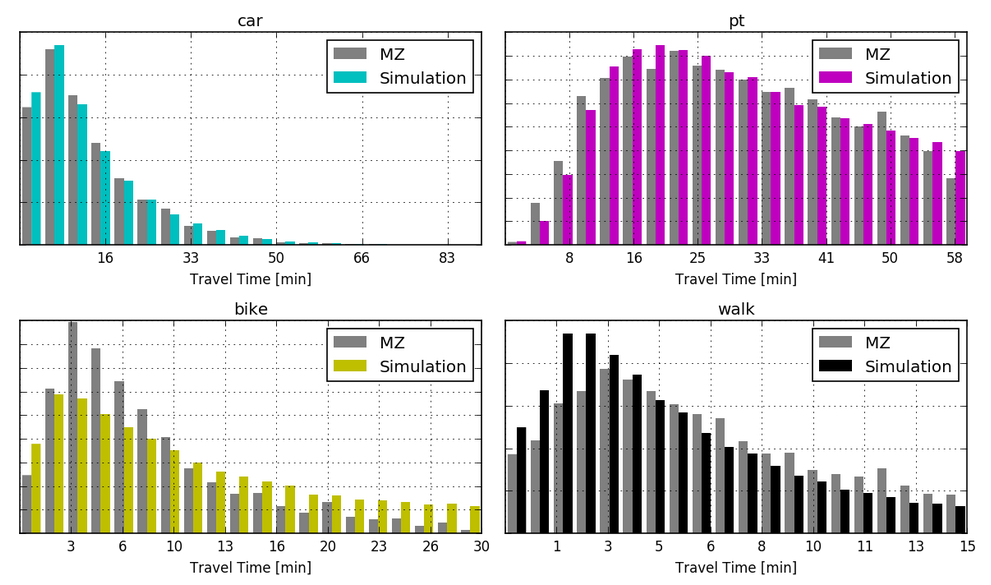
Scenario calibration
Current research at IVT
Self-driving vehicles
Self-driving vehicles
Access to Mobility
Effective Capacities
Costs
Individualization
Empty distance
Travels
Net effect?
Self-driving vehicles

Current research
- Cost calculator
- Model choice model
- Simulation (MATSim)
- Scenario
- New components, integration
Cost Calculator
- Fleets of autonomous vehicles
- Private autonomous vehicles
- Comparison with conventional vehicles
Cost Calculator

Cost Calculator
0.67 CHF
per passenger kilometer
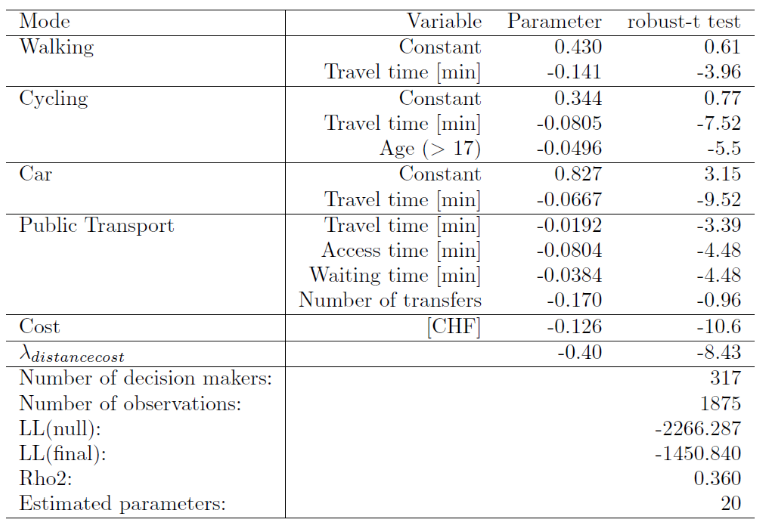
Mode Choice Model
- Stated preference survey
- 400 respondents
- 400 respondents
- Attitudes towards different AV services
- Shared AV
- Pooled AV
- AV feed for public transport
- Work done by Felix Becker

Mode Choice Model
Simulation of AVs

- AV taxi services
- Simple dispatching heuristic
(Bischoff & Maciejewski)
- Multiple operators
- Dynamic demand responses
Idle
Pickup
Drive
Dropoff
Drive
Case study: dispatching strategies
- Maximum demand case
- Freeflow conditions
- Four dispatching strategies
- Load-balancing heuristic
- Global Eucledian Bipartite Matching
- Feedforward Fluidic Rebalancing
- daptive Uniform Rebalancing

Case study: dispatching strategies

Case study: dispatching strategies

Case study: dispatching strategies

Case study: dispatching strategies

Case study 2: Dynamic demand simulations

Work in progress ...
- Scenario analysis
- Changes in accessibility
- Induced Demand
- Effects on public transit ridership
- Missing elements



Spatial constraints
Operational constraints
Intermodality
Thanks!
Questions?
Contact: sebastian.hoerl@ivt.baug.ethz.ch