A Demo Lecture
WIP DRAFT 2
Domain Shift:
Concepts, Techniques, and Applications
Outline
- What is domain shift
- Why should we care
- How to detect domain shift
- Various kinds of domain shift
- Techniques to deal with domain shift (more principled vs. engineering tricks)
- Unifying case study: Autonomous driving
[video edited from 3b1b]
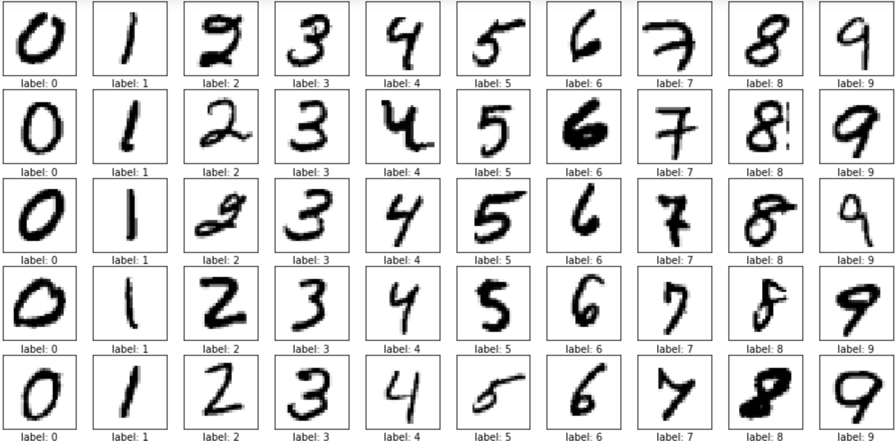
Consider the MNIST dataset
[video edited from 3b1b]
[video edited from 3b1b]
trained such a 2-hidden-layer network for classification
Training Accuracy 97%
Testing Accuracy 81%
The canonical ____ ?
overfitting
...
trained such a 2-hidden-layer network for classification
Training Accuracy 97%
Testing Accuracy 60%
...
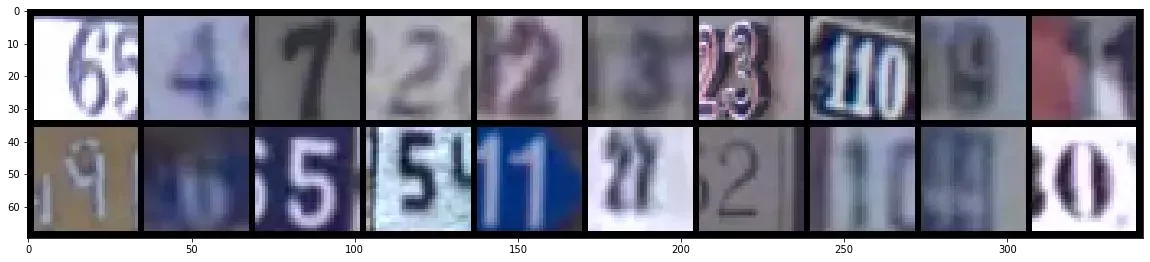
The canonical domain shift
Is this overfitting?
Does this performance gap "feel" the same as before?
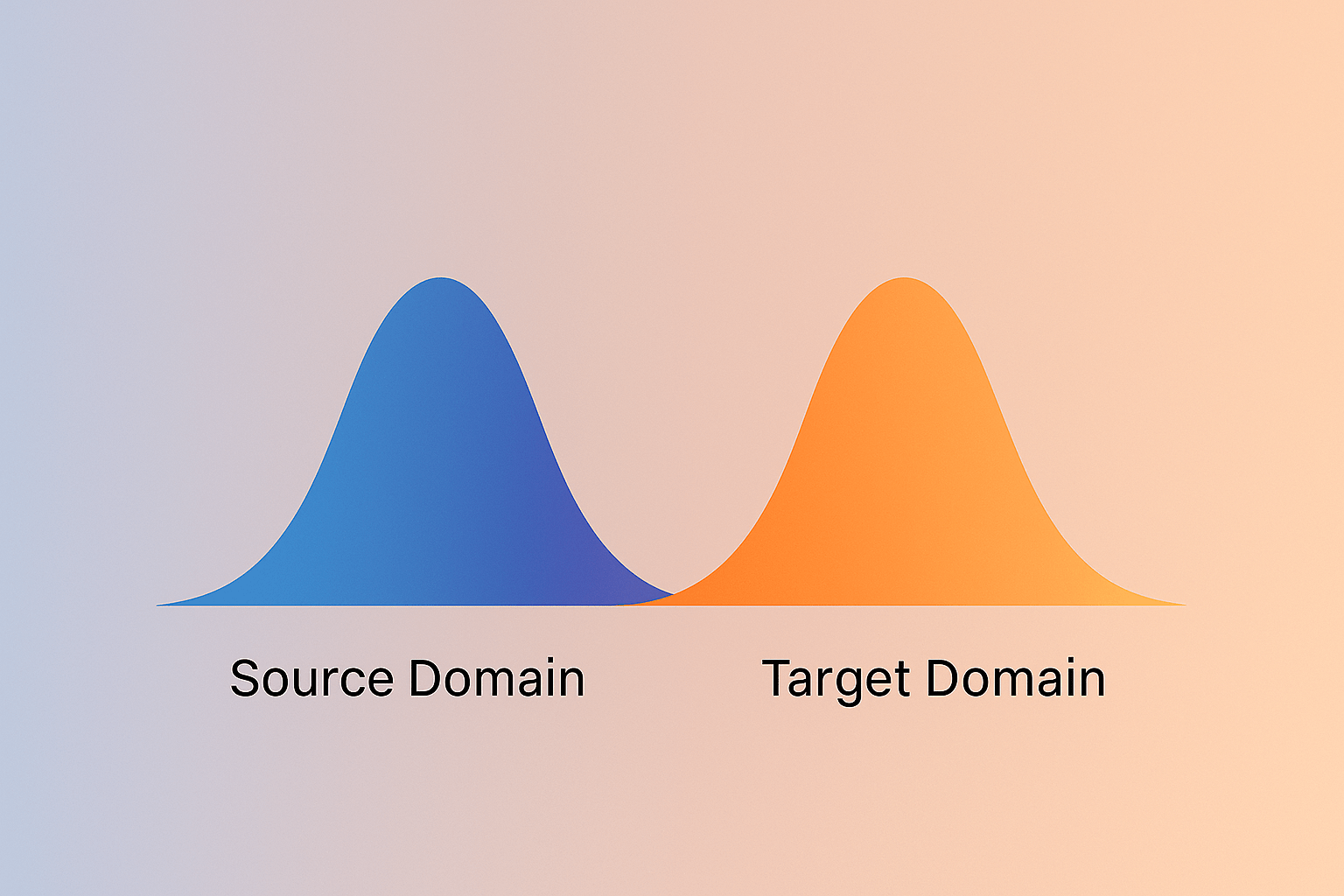
We usually assume that the data we use to train a model is representative of what it will see in the real world — i.e., training and test data share the same structure and characteristics.
What is domain shift?
same domain
different domains
In other words, we often assume training and test data come from the same distribution, or the same domain. Domain shift happens when this assumption fails.
| Overfitting | Domain Shift | |
|---|---|---|
| Training vs. Testing Error | Training low, testing high | |
| Analogy | studies only past C01 exams, tested on C01 exam | studies all C01 materials (hw, lectures, etc.), tested on C011 exam |
| Cause | Model memorizes noise or overly specific patterns | Distribution mismatch between training and testing data |
| Symptoms | High variance across data splits | Poor generalization on new environments or populations |
| Data Distribution | Same for train and test (P_train(x, y) ≈ P_test(x, y)) | Different for train and test (P_train(x, y) ≠ P_test(x, y)) |
| Typical Fixes | Regularization, dropout, simpler model, more data | Domain adaptation, importance weighting, data augmentation |
ML models may generalize poorly when domain shift occurs.
Domain Shift Is the Norm, Not the Exception
E.g., temporal changes:
- predictors trained from older data before Covid
- applied post Covid

E.g., demographic/context changes
- speech recognition system

trained on 🇬🇧 accent
applied on 🇬🇧 🇮🇪 🇺🇸 🇦🇺 ... accents

- E.g., demographic/context changes
- risk predictors that are trained on patient data from one hospital and used in a different hospital
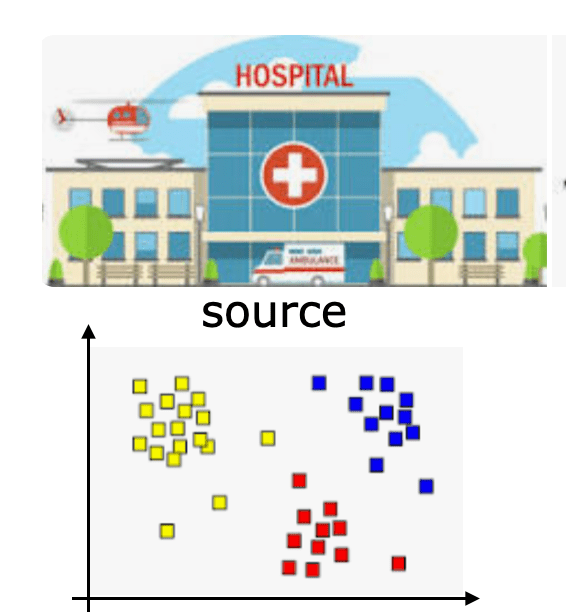
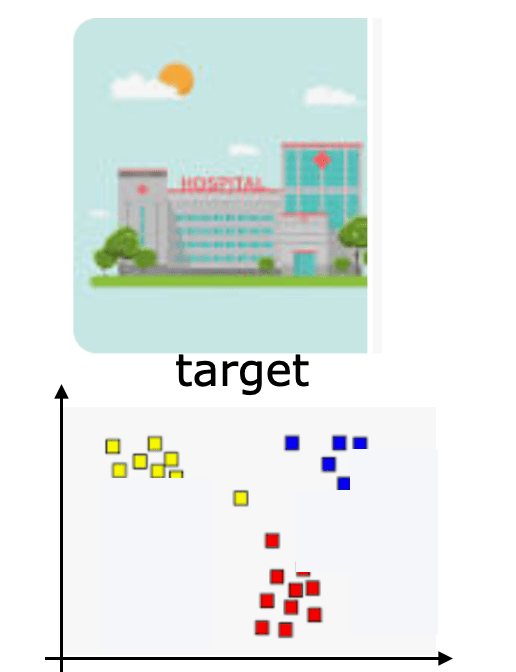

trained at
deployed at
we also call this the
source
and this the target
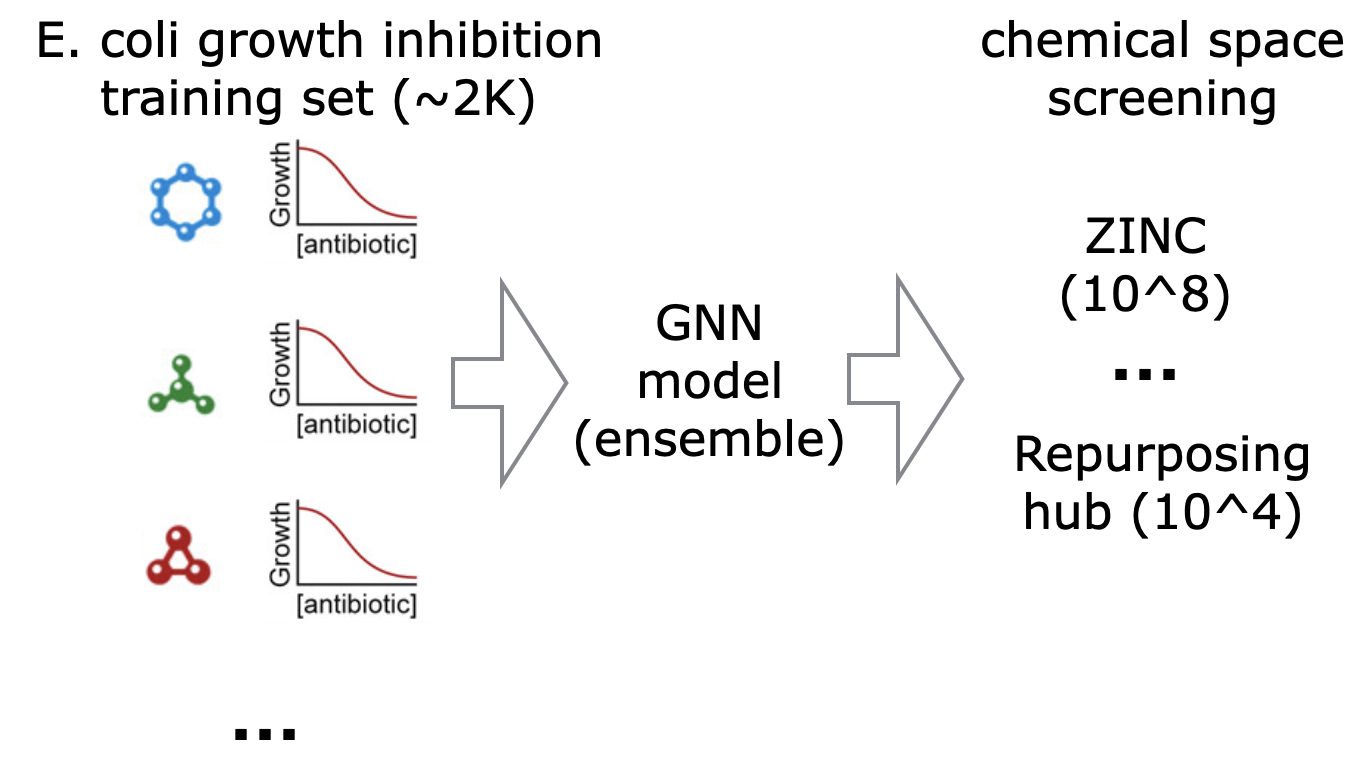
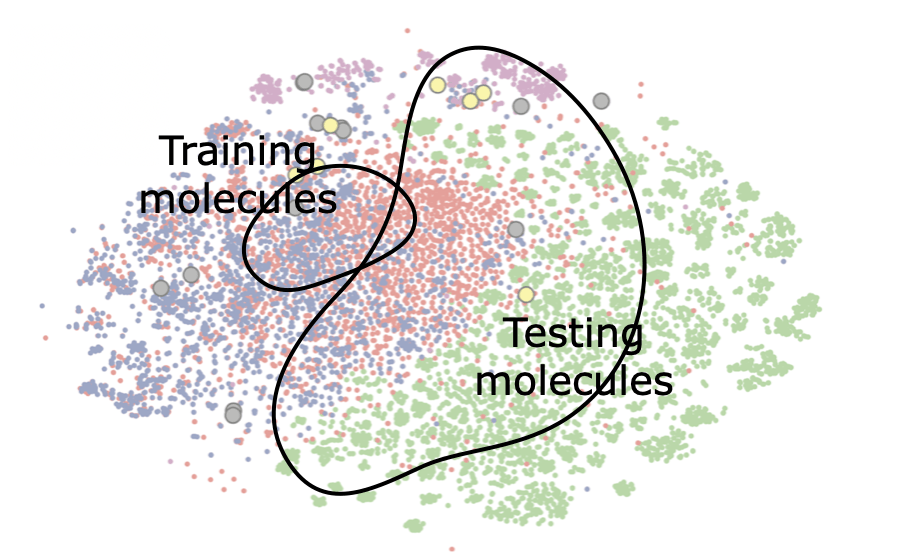
E.g., actions we take
- predictors that are used in iterative experiment design (e.g., molecule optimization) where the current data comes from earlier rounds of selections
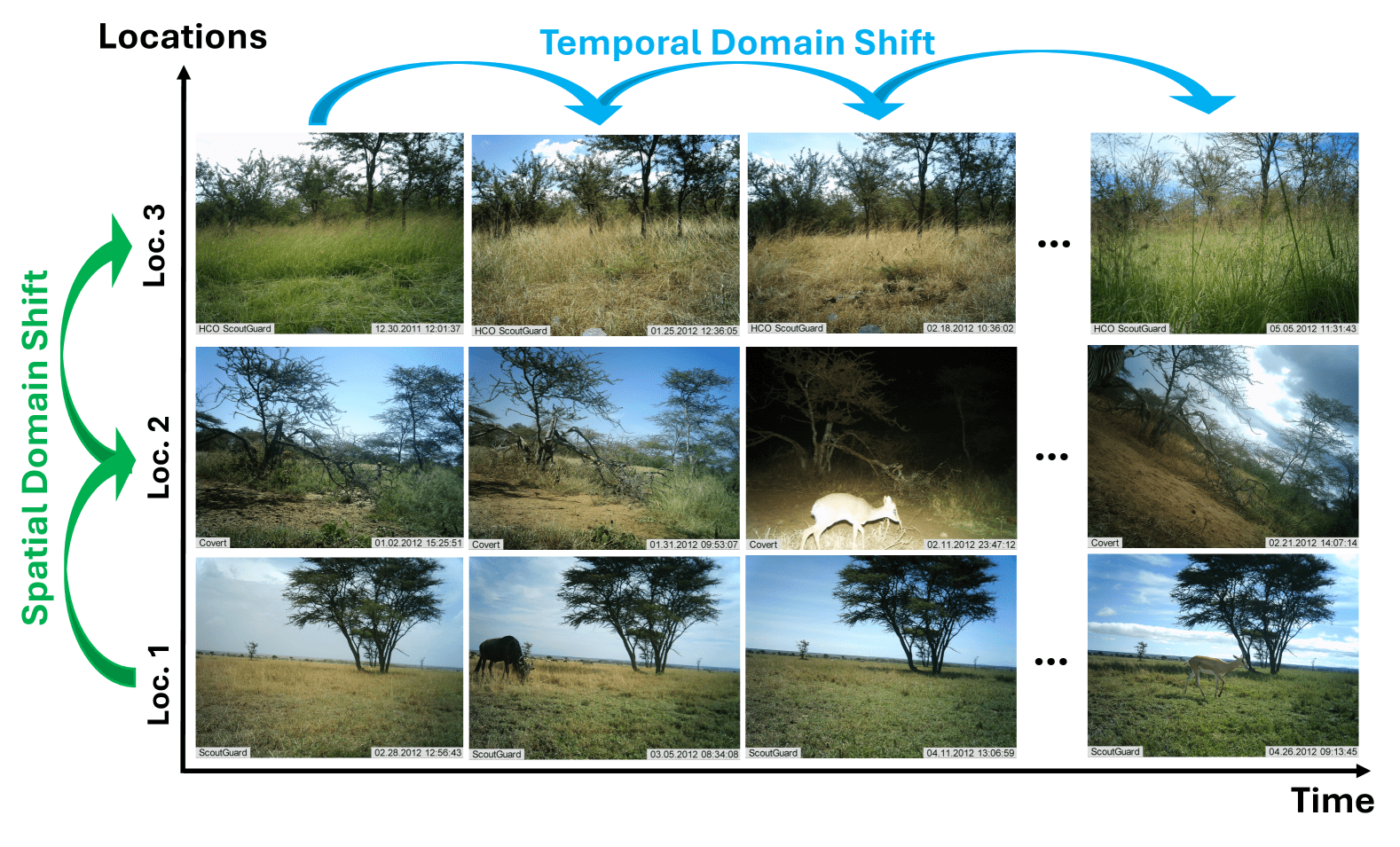
- E.g., wildlife species predictor, class distribution is different for each static sensor location
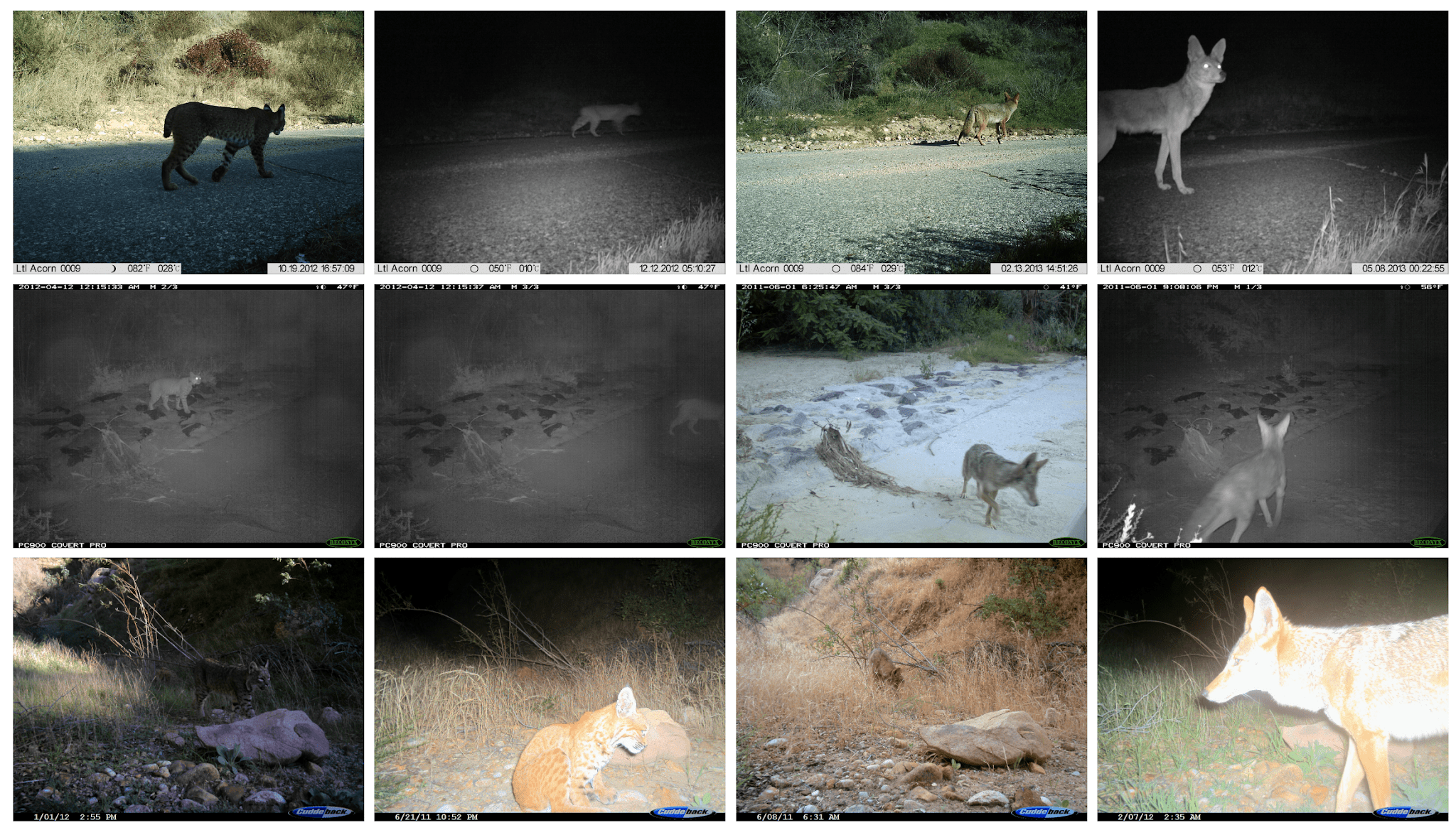
- E.g., wildlife species predictor, class distribution is different for each static sensor location
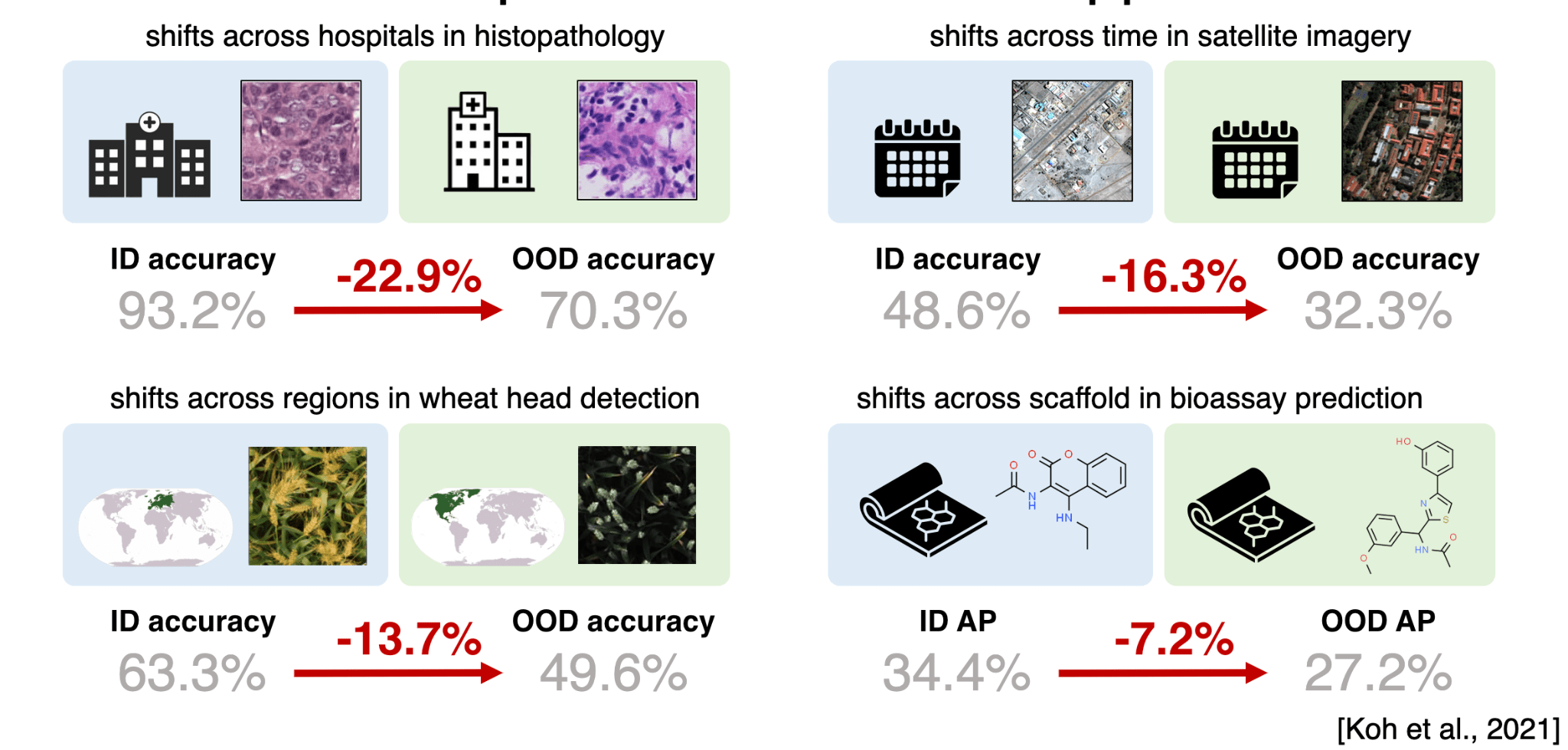
Performance can be substantially affected by “domain shift”…
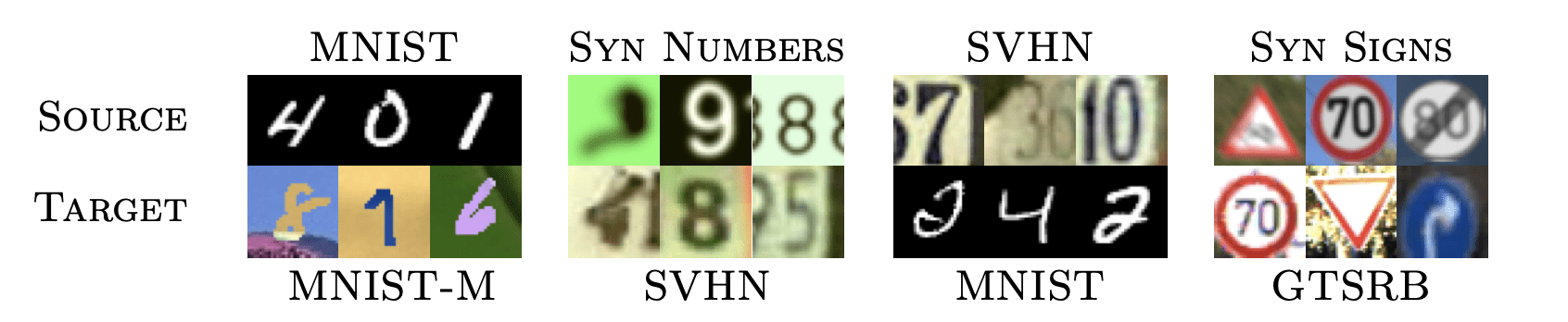
[Ganin et al. 2015]
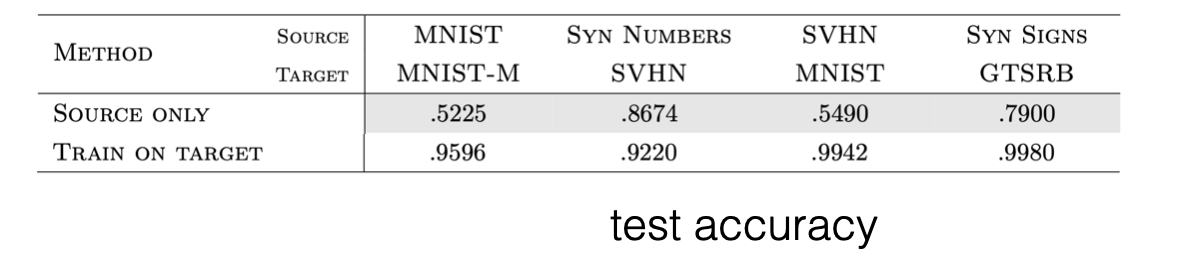
[Koh et al. 2021]
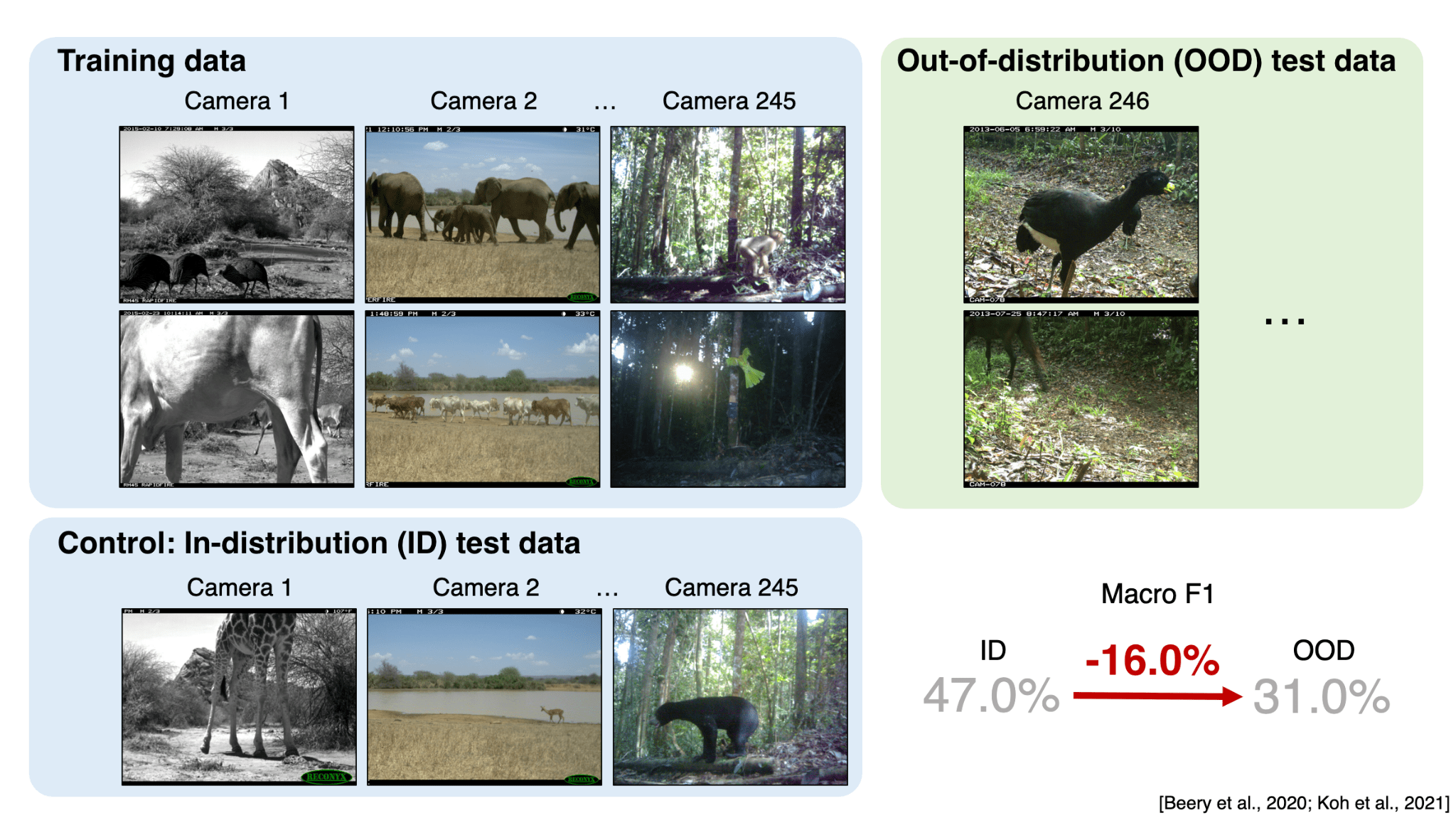
Performance can be substantially affected by "domain shift"…
[Beery et al. 2020, Koh et al. 2021]
Performance can be substantially affected by "domain shift"…
- Nowadays, in the pre-training scenario, both data and task are typically different between the source (pre-training data/task) and the target (our actual task/data)
- For the rest of the lecture we focus on understanding and adjusting to “data shifts” while the prediction task remains the same
- The differences in the data arise for many reasons, and these reasons may be known or unknown
- We'd rely on domain adaptation to deal with the shift.
Domain Shift
very little one can do when the shift is "too significant".
to deal with shift in a meaningful way, there must be some properties -- maybe hidden, or conditional -- that remain unchanged, despite the overall shift
How to address domain shift?
e.g. if the target task is to speak a foreign language, it seems almost useless to train on skateboarding
E.g. Train a deer detector using images (captured in sunny daytime)
- What's the features, what's the label?
Train a deer detector using images (captured in sunny daytime)
- Deployed in nighttime ...
A deer detector, trained in daytime and tested in nighttime:
- Q: What's changing?
- A: The feature \(x\) daytime is brighter, more blues and greens. nighttime more blacks and yellows
- Q: What must remain the same for the training to have some hope of being "meaningful"?
- A: What a deer looks like, regardless of the color, must retain a deer-ish 🦌 silhouette
A deer detector, trained in daytime and tested in nighttime:
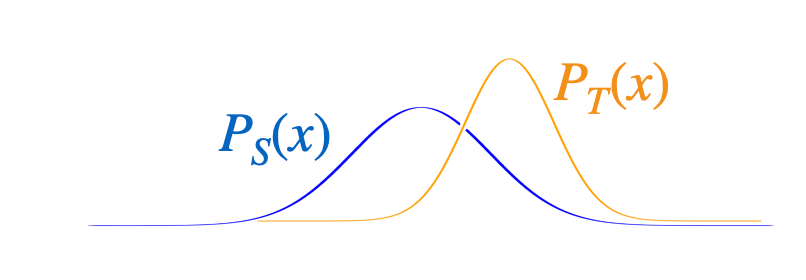
- The defining characteristic of co-variate shift, i.e., that the target \(P_T(x)\) differs from the source \(P_S(x)\), is present in almost any real prediction task
- There's an additional assumption that the relation between \(x\) and \(y\) remains the same; this assumption is less often true in reality (but enables us to do something)
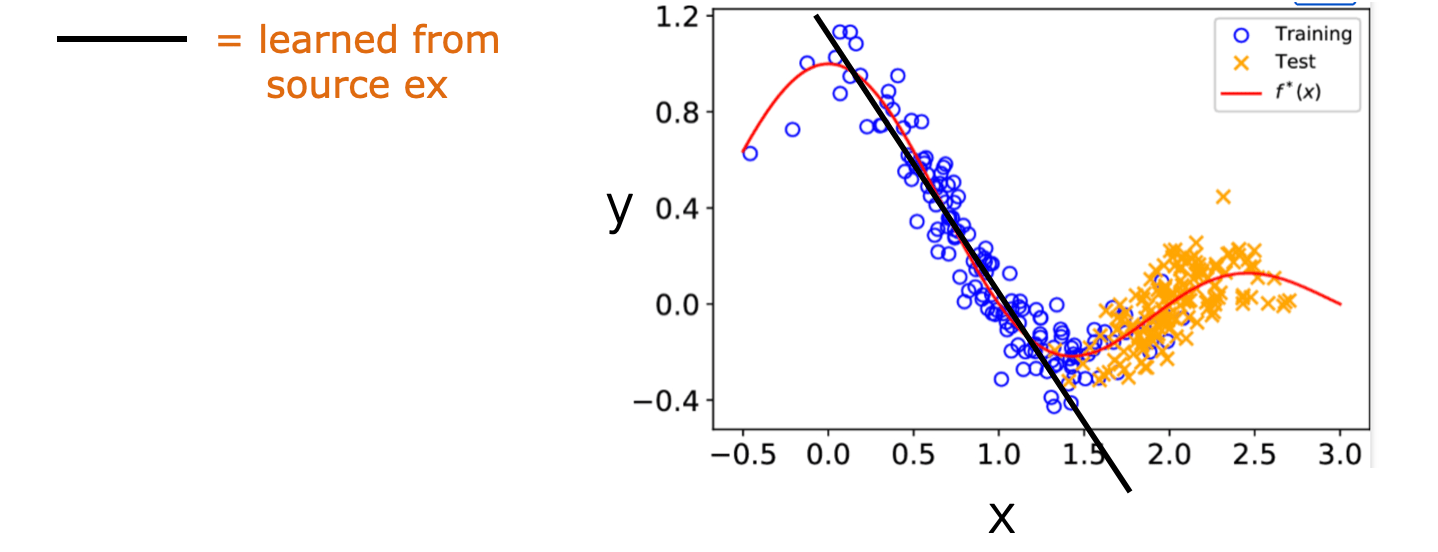
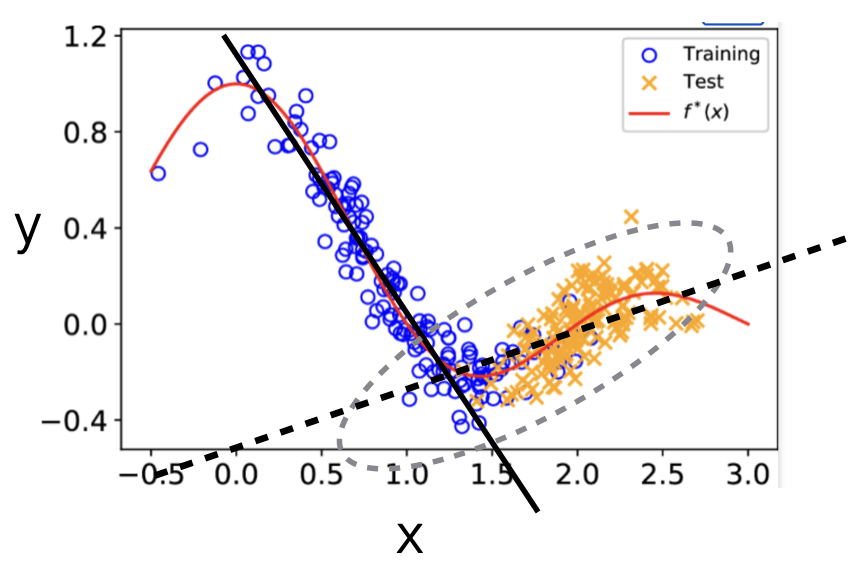
- The effect is that, e.g., estimating a regression model from the source data may improperly emphasize the wrong examples (never seen in target domain)
Case # 1 Co-variate Shift
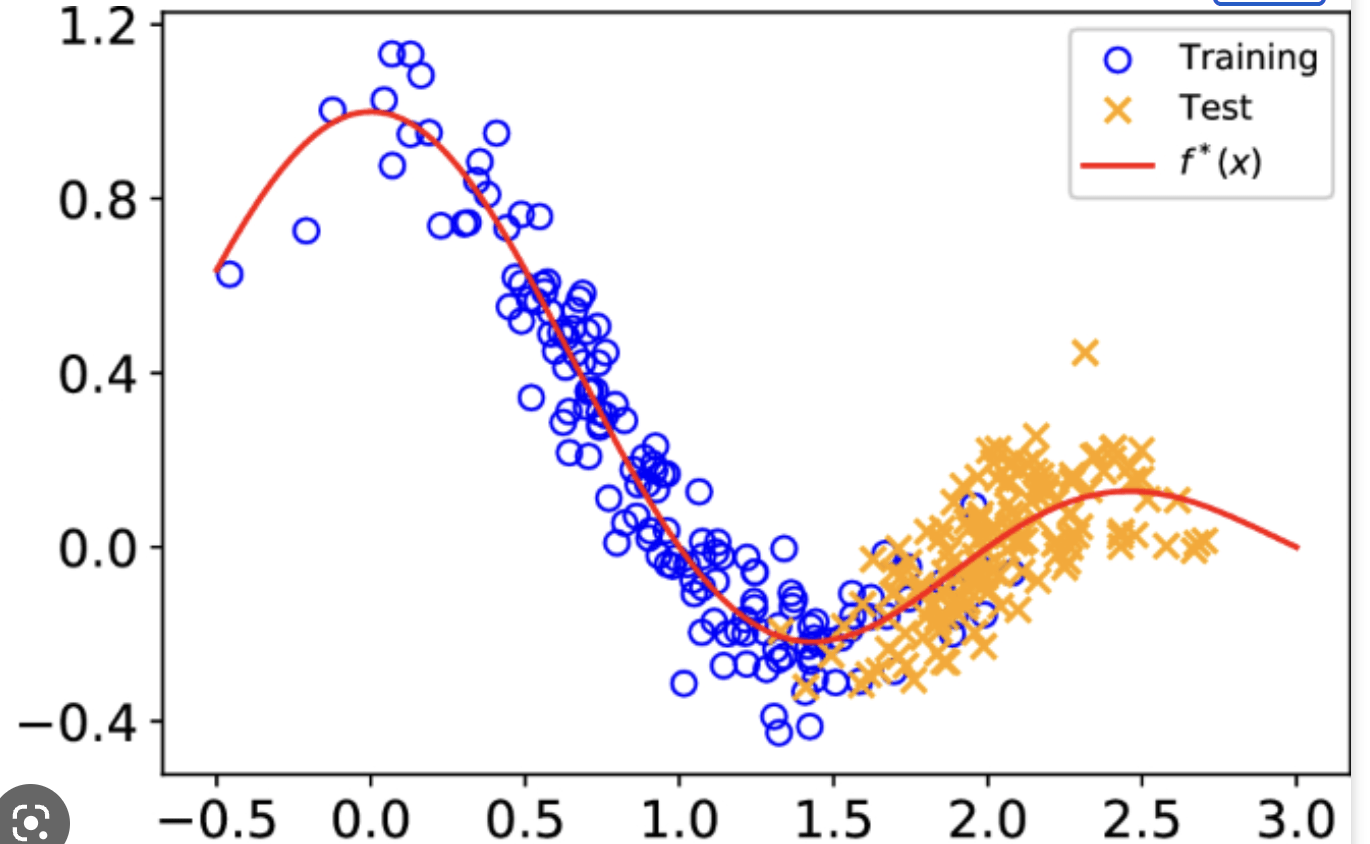
- The effect of co-variate shift is that, e.g., estimating a regression model from the source data may improperly emphasize the wrong examples
- Assumptions:
- common underlying function or \(P(y \mid x)\)
- lots of labeled examples from the source
- lots of unlabeled examples from the source and the target
- We want:
- a \(P(y \mid x)\) estimate that works well on the target samples
Case # 1 Co-variate Shift
- When \(P_T(x)\) differs from \(P_S(x)\) we could still in principle use the same classifier or regression model \(P(y \mid x, \theta)\) trained from the source examples
- But estimating this regression model from the source data may improperly emphasize the wrong examples (e.g., x 's where \(P_S(x)\) is large but \(P_T(x)\) is small)
Case # 1 Co-variate Shift
We would like to estimate \(\theta\) that minimizes
\(\sum_{x, y} P_T(x, y) \operatorname{Loss}(x, y, \theta)\)
\(=\sum_{x, y} P_S(x, y) \frac{P_T(x, y)}{P_S(x, y)} \operatorname{Loss}(x, y, \theta)\)
\(=\sum_{x, y} P_S(x, y) \frac{P_T(x) P_T(y \mid x)}{P_S(x) P_S(y \mid x)} \operatorname{Loss}(x, y, \theta)\)
\(=\sum_{x, y} P_S(x, y) \frac{P_T(x)}{P_S(x)} \operatorname{Loss}(x, y, \theta)\)
average over the target distribution
weighted average over the source distribution
Case # 1 Co-variate Shift
- How do we get the ratio \(P_T(x) / P_S(x)\) used as weights in the new estimation criterion? If \(x\) is high dimensional, estimating such distributions is challenging.
- It turns out we can train a simple domain classifier to estimate this ratio
- only use unlabeled examples from the source and target
- label examples according to whether they come from the source S or target T
- estimate a domain classifier \(Q(S \mid x)\) from such labeled data -
If the domain classifier is "perfect" then
\(Q(S \mid x)=\frac{P_S(x)}{P_S(x)+P_T(x)} \quad \frac{Q(S \mid x)}{Q(T \mid x)}=\frac{P_S(x)}{P_T(x)}\)
-
So we can get the ratio weights required for estimation directly from the domain classifier
Case # 1 Co-variate Shift
- Since we can now get the required probability ratios from the domain classifier, we can estimate
- The labeled samples are now source training examples. The domain classifier itself is estimated from unlabeled source and target samples (co-variates only)
Case # 1 Co-variate Shift
Now let's look at another type of shift that's "fixable" in a relatively easy and principled way
TODO: so many bugs... 😱
need fix
Similar to the MNIST demo, consider a similar scenario.
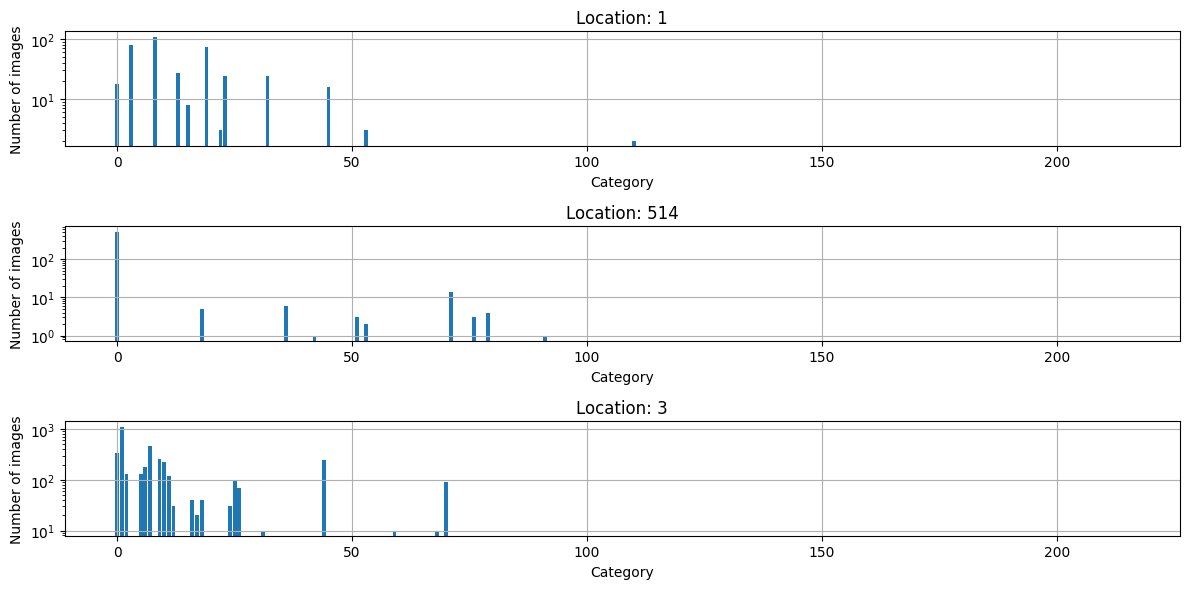
A species detector, trained using images from location 514.
What's the features, what's the labels?
Features \(x\): images, labels \(y\): category index
Species detector, trained at location 514, deployed at other locations.
What are do these bar charts represent?
Distribution over \(y:\) e.g. species 25 rare at location 514, not so rare at other locations.
- Here, we adjust an already trained classifier \(P_S(y \mid x)\) so that it is appropriate for the target domain where the label proportions are different
- E.g., a new specialized clinic appears next to a hospital. So patients with certain illnesses covered by the clinic are now less frequently coming to the hospital. But we can hypothesize that those who still come “look” the same as before, there are just fewer of them.
Case # 2 Label shift
More formally, assumptions:
- Lots of source examples, can train an optimal source classifier \(P_S(y \mid x)\)
- Labeled examples look conditionally the same from source to target, i.e., \(P_S(x \mid y)=P_T(x \mid y)\), but proportions of different labels change
- We know the label proportions \(P_S(y)\) (observed) and \(P_T(y)\) (assumed)
We want:
- optimal target classifier \(P_T(y \mid x)\)
Case # 2 Label shift
- how we can adjust an already trained classifier \(P_S(y \mid x)\) so that it is appropriate for the target domain where the label proportions are different
- Let's consider any \(x\) (fixed, only y varies) and try to construct the target classifier based on the available information
Adjusting for label shift
\(P_T(y \mid x) \propto P_T(x \mid y) P_T(y)\)
\(=P_S(x \mid y) P_T(y)\)
\(=P_S(x \mid y) P_S(y) \frac{P_T(y)}{P_S(y)}\)
\(\propto \frac{P_S(x \mid y) P_S(y)}{P_S(x)} \frac{P_T(y)}{P_S(y)}\)
\(=P_S(y \mid x) \frac{P_T(y)}{P_S(y)}\)
class conditional distributions assumed to be the same
x is fixed, so we can include any x term
we have expressed the target classifier proportionally to the source classifier and the label ratios; normalizing this across y for any given x gives our target classifier
Let’s consider two scenarios where we can adjust what we do
- Case #1 (label shift only): the proportions of labels differs from the source to the target domain, the data are otherwise generated the same
- Case #2 (co-variate shift only): the distribution of co-variates (distribution over x’s) differs from the source to target domain, the data are otherwise generated the same
(these are not mutually consistent, and do not cover all shifts)
Adjusting for two types of shifts
Domain Shift and Adaptation Summary
| Shift Type | What Changes? | Typical Assumption | Need to Reweight? | Need to Relearn? |
|---|---|---|---|---|
| Covariate Shift | P(x) changes | P(y|x) stays the same | Yes (importance sampling on x) | No |
| Label Shift | P(y) changes | P(x|y) stays the same | Yes (importance sampling on y) | No |
| Concept Shift | P(y|x) changes | Neither P(x) nor P(y) necessarily stay the same | No (reweighting not enough) | Yes |
More general domain adaptation possibilities
-
Goal is to learn from labeled/annotated training (source) examples and transfer this knowledge for use in a different (target) domain
-
For supervised learning: we have some annotated examples also from the target domain
-
For semi-supervised: we have lots of unlabeled target examples and just a few annotations
-
For unsupervised: we only have unlabeled examples from the target domain
-
For reinforcement learning: we have access to (source) environment, and aim to transfer policies to a (target) environment, possibly with limited or no interaction data from the target
ToDo: add citations, plots here for each case
Data augmentation
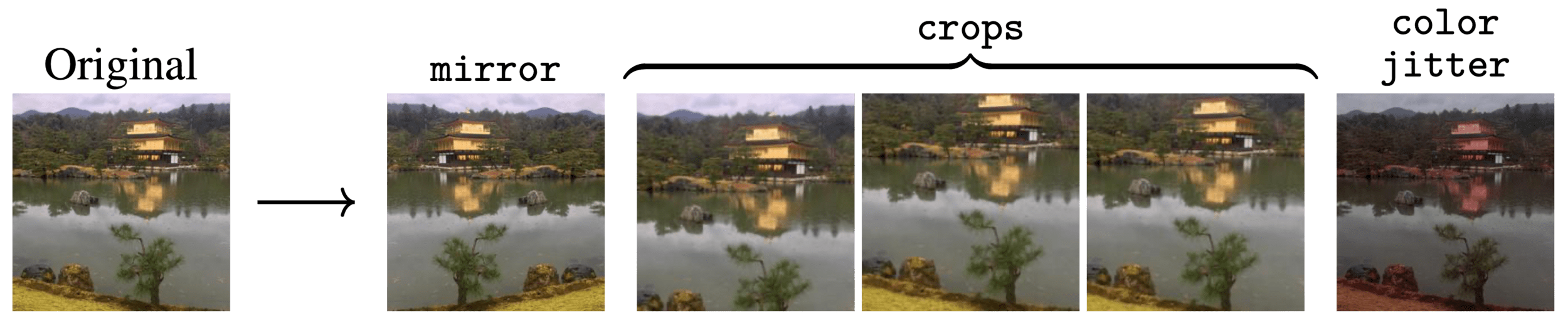

Data augmentation

Data augmentation
- Common problem: I collect all my data in Spring, but the model does not work anymore in Winter!
- Possible solutions:
- Add augmentation to account for distribution shift, e.g., color jittering
- Use pre-trained model that has been trained on all-season data, though not exactly your task
- Or… just wait for Winter and collect more data (most effective)!

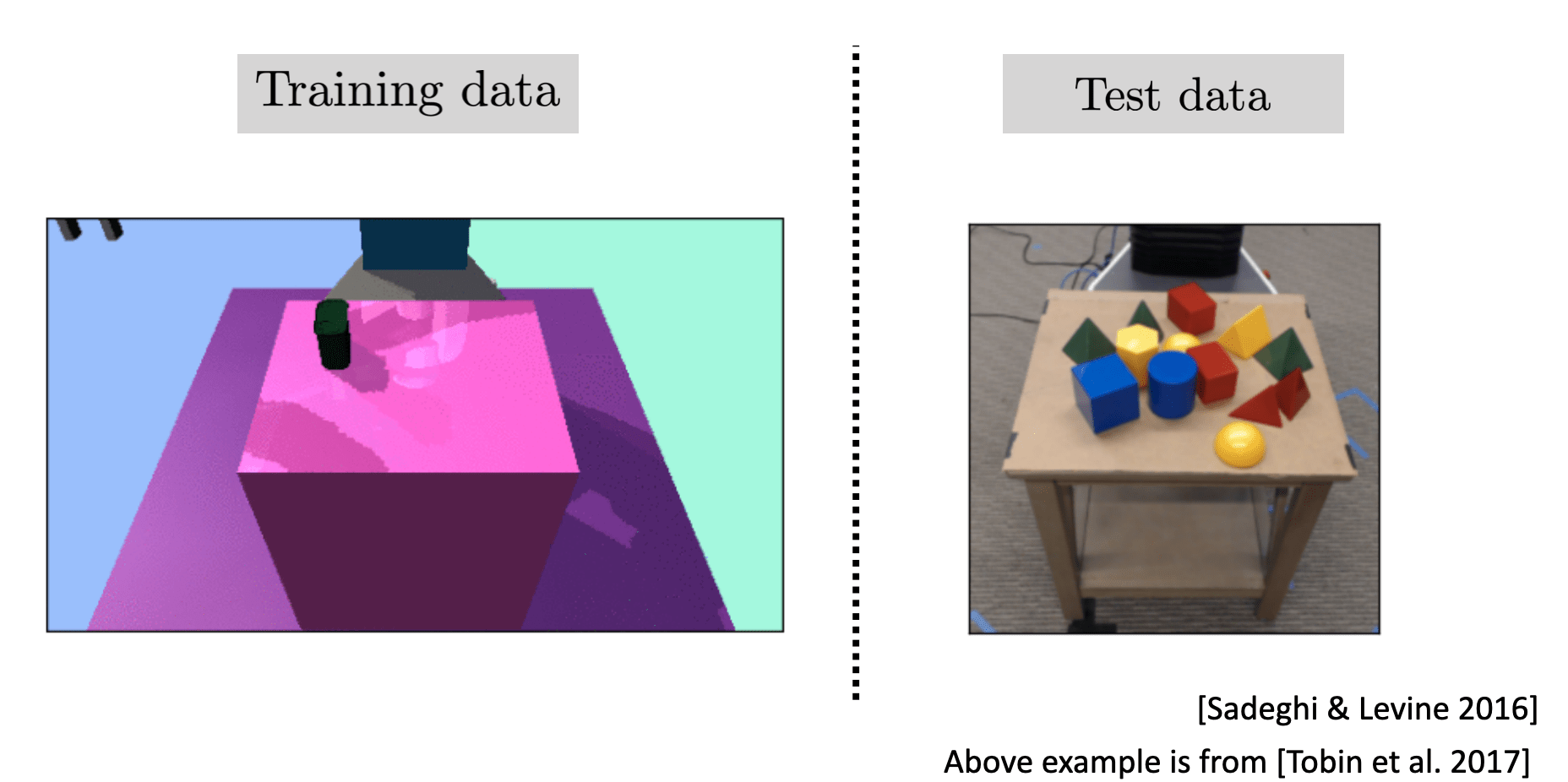
Domain randomization
Case Study: Domain Shift in Autonomous Driving
Motivation
Let’s revisit domain shift — this time through the lens of a real-world application.
Autonomous driving gives us rich, practical examples of all types of shift.
Covariate Shift in Driving
Training: Urban, sunny, daytime data in California
Testing: Nighttime, fog, rain, snow — possibly in Europe
- The input appearance changes drastically
- But the meaning of features (e.g. pedestrians, signs) stays the same
- This is a shift in P(X), while P(Y|X) stays stable
Visual Example: Covariate Shift
[Insert visual of sunny vs. foggy streets]
Same pedestrians, different pixel distributions
Label Shift in Driving
Training: Suburban setting — fewer pedestrians, many stop signs
Testing: City center near a school — more pedestrians and cyclists
- Label frequencies change: P(Y) shifts
- But each class still looks the same: P(X|Y) unchanged
Visual Example: Label Shift
[Insert bar plot of class distribution across domains]
Target domain has more bikes, fewer stop signs
Importance Weighting
To adapt label-shifted data:
- Weight training samples by:
w(y) = P_target(Y=y) / P_source(Y=y) - Helps rebalance what the model emphasizes during training
Q: how to adapt for co-variate shift?
Sim-to-real adaptation
| Setting | Description |
|---|---|
| Unsupervised | No target labels |
| Semi-supervised | Few labeled target samples |
| Supervised | Fully labeled target data |
- Techniques include adversarial training, feature alignment, and fine-tuning
Wrap-Up: What Shift Did You See?
- What kind of shift occurred?
- How would you correct for it?
- What’s the risk if we ignore the shift?
Domain shift is not rare — it’s constant in the real world.
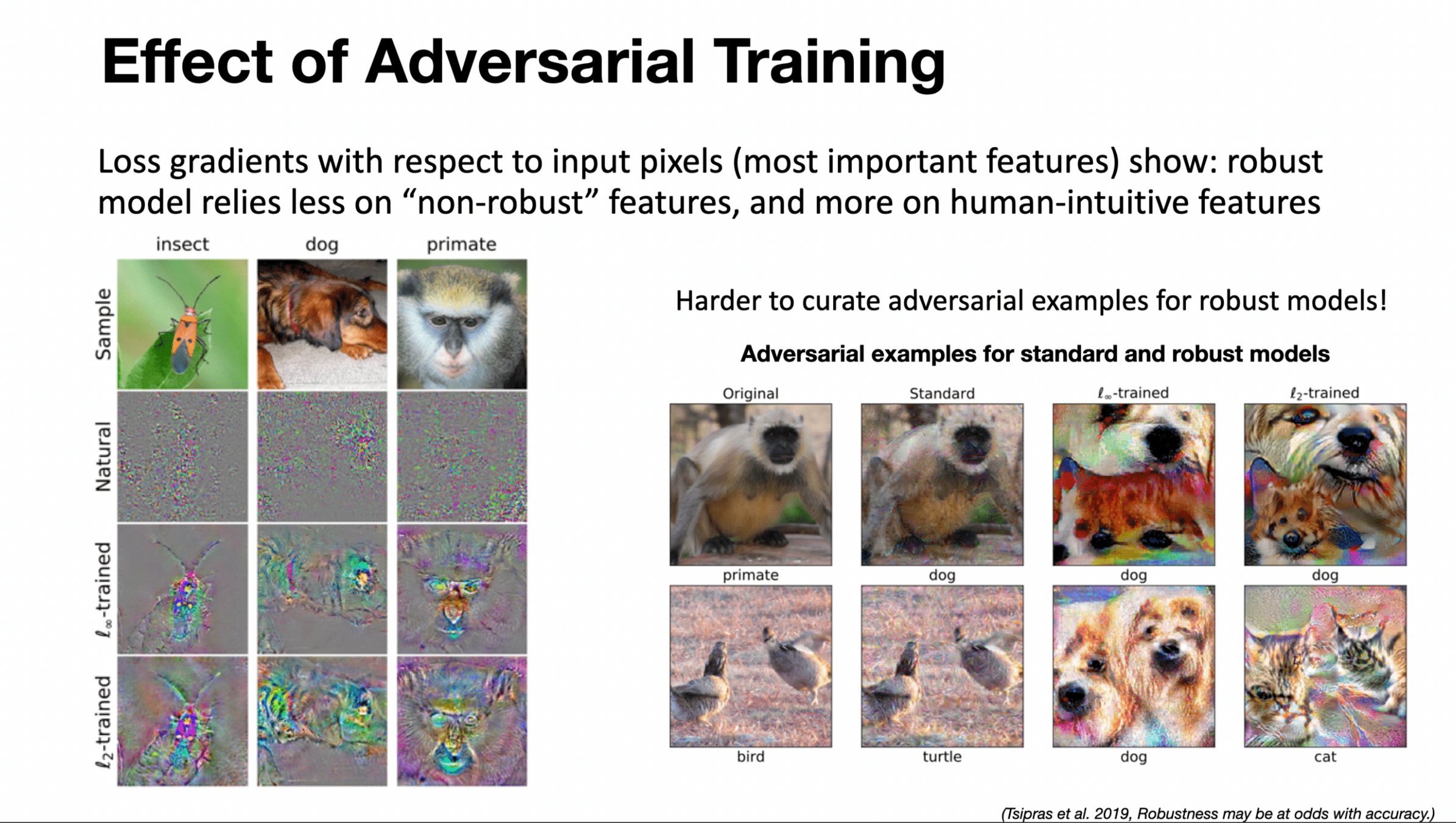
Robustness