Optimization and Special Matrices
/codex26
this talk!
CodEx
February 10, 2026
Joint Work With:
Florida State University
Funding
National Science Foundation (DMS–2107700)
Arizona State University
Take-Home Messages
- Symmetry + geometry sometimes tells you an optimization problem is easier than expected.
- Optimization can tell us something about topology.
Some Special Matrices
- Self-adjoint
- Unitary
- Normal (equivalently: orthogonally diagonalizable)
- Self-adjoint with given spectrum (e.g., Gram matrices of Parseval frames)
- Fixed singular values (e.g., Parseval frames)
- Fixed row/column norms (e.g., equal-norm frames)
Can these be realized as minima of some (nice) potential?
Normal Matrices
Definition.
\(A \in \mathbb{C}^{d \times d}\) is normal if \(AA^\ast = A^\ast A\).
Equivalently,
\(0 = AA^\ast - A^\ast A = [A,A^\ast]\).
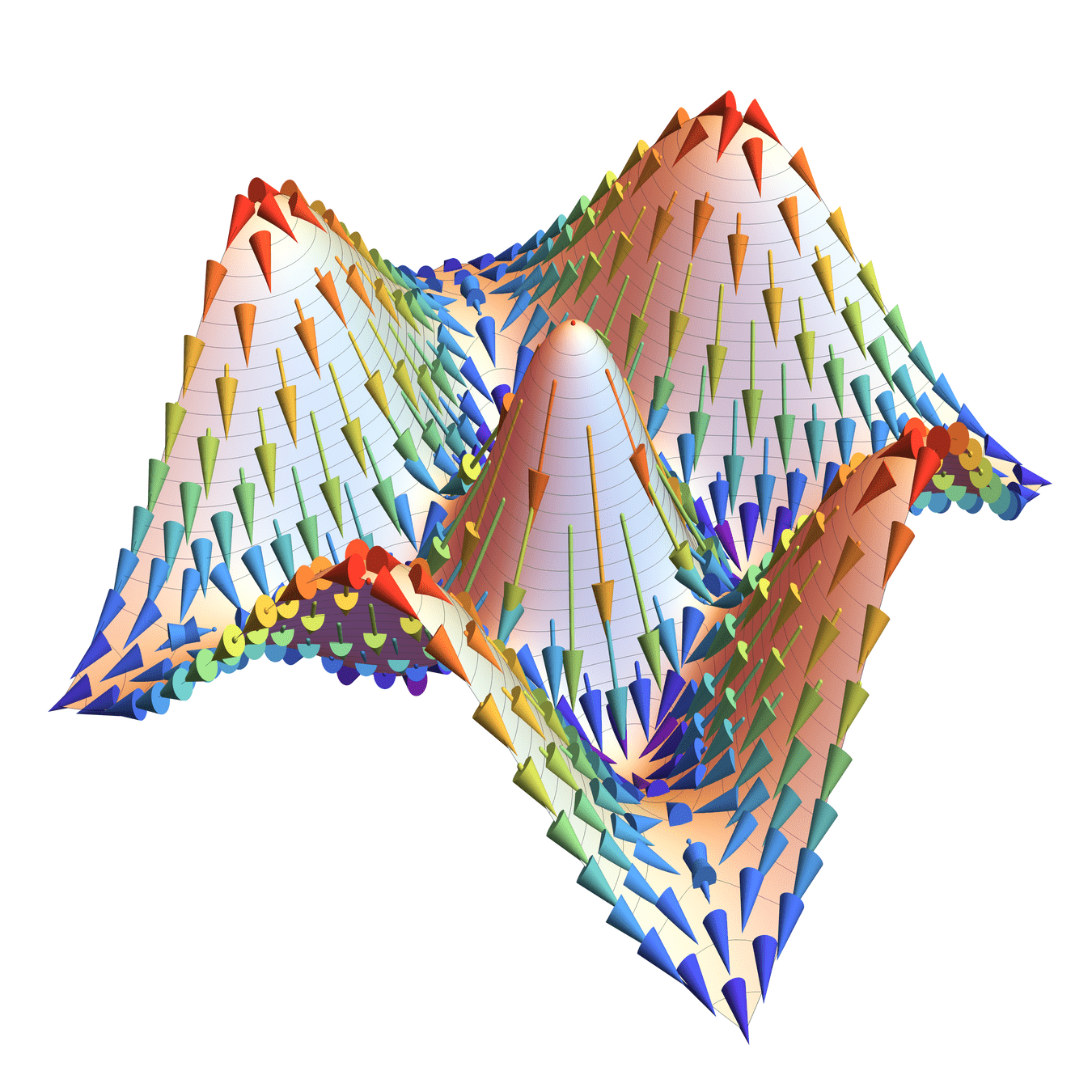
Define the non-normal energy \(\operatorname{E}:\mathbb{C}^{d \times d} \to \mathbb{R}\) by
\(\operatorname{E}(A) := \|[A,A^\ast]\|^2.\)
Obvious Fact.
The normal matrices are the global minima of \(\operatorname{E}\).
Theorem [with Needham]
The only critical points of \(\operatorname{E}\) are the global minima; i.e., the normal matrices.
Normal Matrices
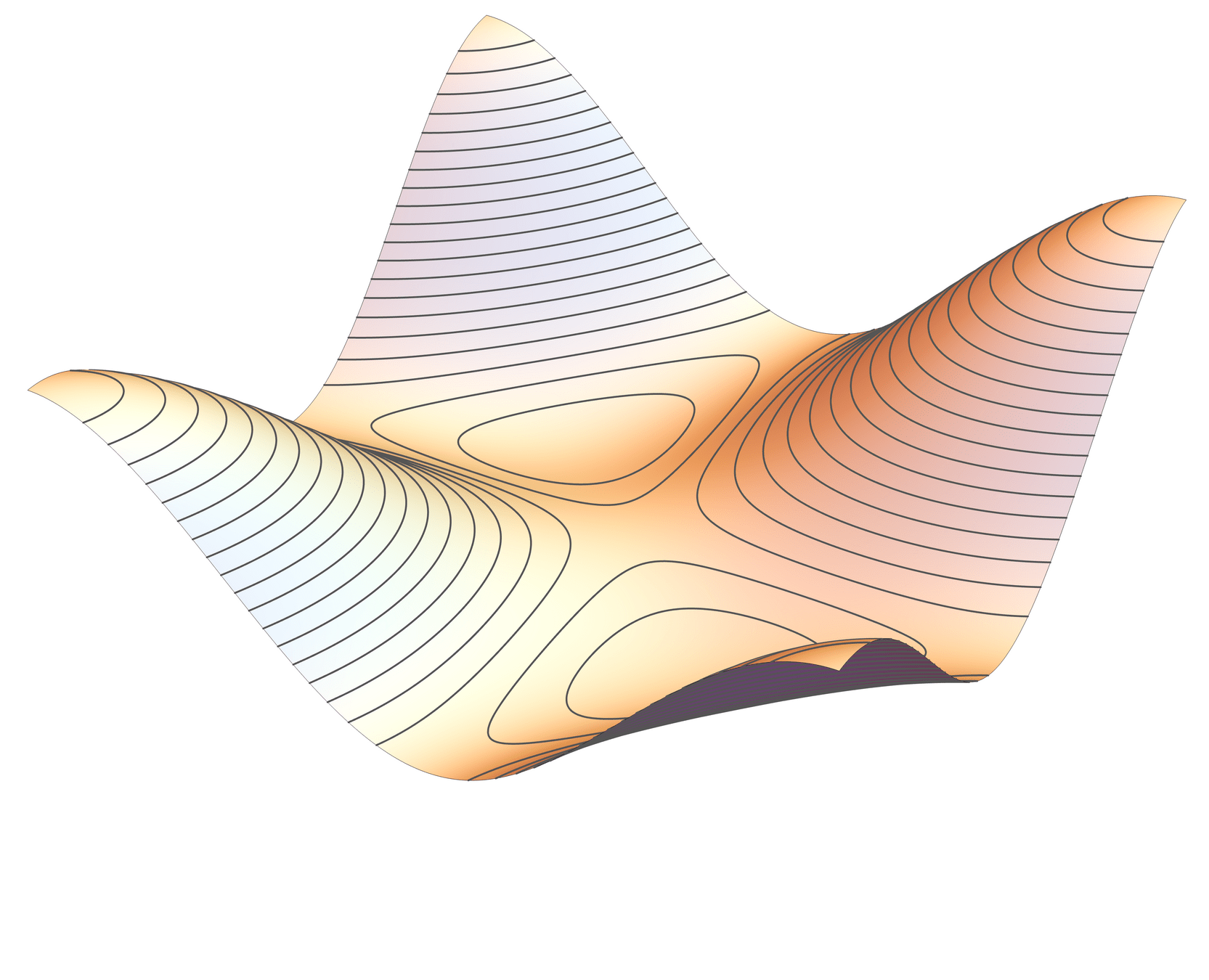
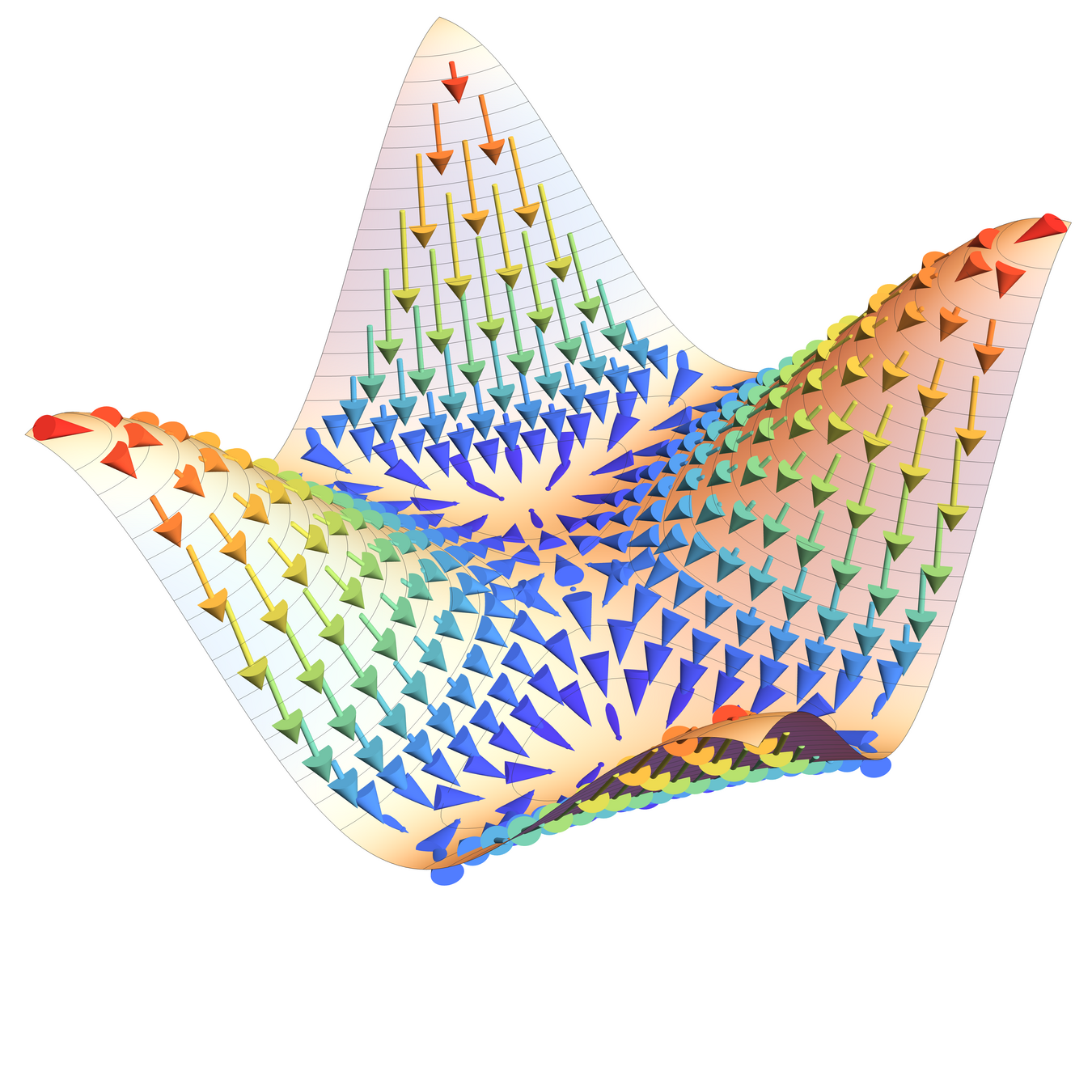
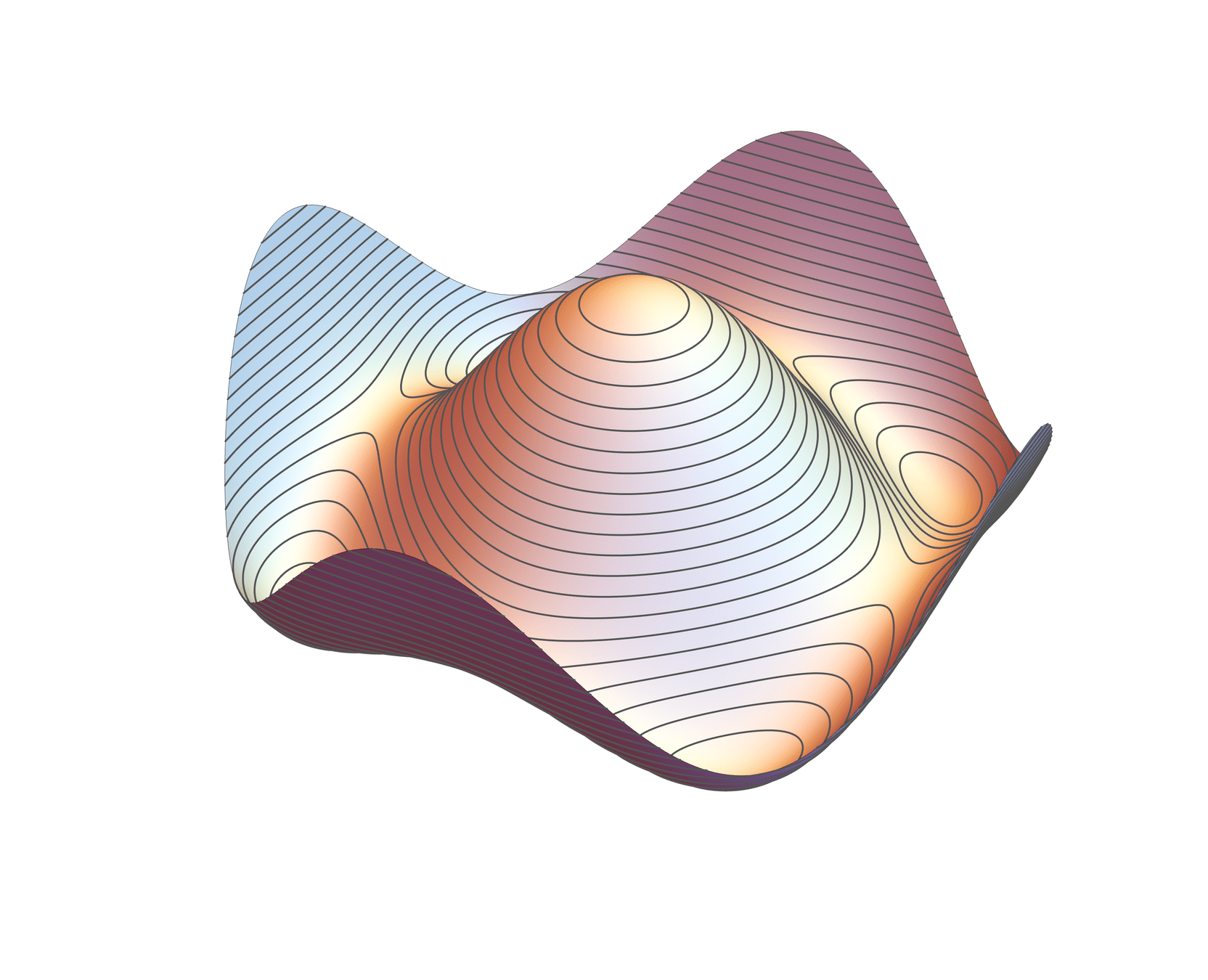
\(\operatorname{E}\) is not quasiconvex!
Theorem [with Needham]
The only critical points of \(\operatorname{E}\) are the global minima; i.e., the normal matrices.
Gradient Descent
Let \(\mathcal{F}: \mathbb{C}^{d \times d} \times \mathbb{R} \to \mathbb{C}^{d \times d}\) be negative gradient descent of \(\operatorname{E}\); i.e.,
\(\mathcal{F}(A_0,0) = A_0 \qquad \frac{d}{dt}\mathcal{F}(A_0,t) = -\nabla \operatorname{E}(\mathcal{F}(A_0,t))\).
Theorem [with Needham]
For any \(A_0 \in \mathbb{C}^{d \times d}\), the matrix \(A_\infty := \lim_{t \to \infty} \mathcal{F}(A_0,t)\) exists, is normal, has the same eigenvalues as \(A_0\), and is real if \(A_0\) is.
Why?
\(\mathbb{C}^{d \times d}\) is symplectic, with symplectic form \(\omega_A(X,Y) = -\mathrm{Im}\langle X,Y \rangle = -\mathrm{Im}\mathrm{Tr}(Y^\ast X)\).
A symplectic manifold is a smooth manifold \(M\) together with a closed, non-degenerate 2-form \(\omega \in \Omega^2(M)\).
Example: \((\mathbb{R}^2,dx \wedge dy) = (\mathbb{C},\frac{i}{2}dz \wedge d\bar{z})\)
Why?
\(\mathbb{C}^{d \times d}\) is symplectic, with symplectic form \(\omega_A(X,Y) = -\mathrm{Im}\langle X,Y \rangle = -\mathrm{Im}\mathrm{Tr}(Y^\ast X)\).
Consider the conjugation action of \(\operatorname{SU}(d)\) on \(\mathbb{C}^{d \times d}\): \(U \cdot A = U A U^\ast\).
This action is Hamiltonian with associated momentum map \(\mu: \mathbb{C}^{d \times d} \to \mathscr{H}_0(d)\) given by
\(\mu(A) := [A,A^\ast]\).
So \(\operatorname{E}(A) = \|\mu(A)\|^2\).

Frances Kirwan
Gert-Martin Greuel [CC BY-SA 2.0 DE], from Oberwolfach Photo Collection
Image by rawpixel.com on Freepik
This kind of function is really nice!
Geometric Invariant Theory (GIT)
The GIT quotient consists of group orbits which can be distinguished by \(G\)-invariant (homogeneous) polynomials.
\(\mathbb{C}^* \curvearrowright \mathbb{CP}^2\)
\(t \cdot [z_0:z_1:z_2] = [z_0: tz_1:\frac{1}{t}z_2]\)
Roughly: identify orbits whose closures intersect, throw away orbits on which all \(G\)-invariant polynomials vanish.
\( \mathbb{CP}^2/\!/\,\mathbb{C}^* \cong\mathbb{CP}^1\)
Abelian Version
Let \(T \simeq \operatorname{U}(1)^{d-1}\) be the diagonal subgroup of \(\operatorname{SU}(d)\). The conjugation action of \(T\) on \(\mathbb{C}^{d \times d}\) is also Hamiltonian, with momentum map
\(A \mapsto \mathrm{diag}([A,A^\ast])\).
\([A,A^\ast]_{ii} = \|A_i\|^2 - \|A^i\|^2\), where \(A_i\) is the \(i\)th row of \(A\) and \(A^i\) is the \(i\)th column.
If \(A = \left(a_{ij}\right)_{i,j} \in \mathbb{R}^{d \times d}\) such that \(\mathrm{diag}([A,A^\ast]) = 0\), then \(\widehat{A} = \left(a_{ij}^2\right)_{i,j}\) is the adjacency matrix of a balanced multigraph.
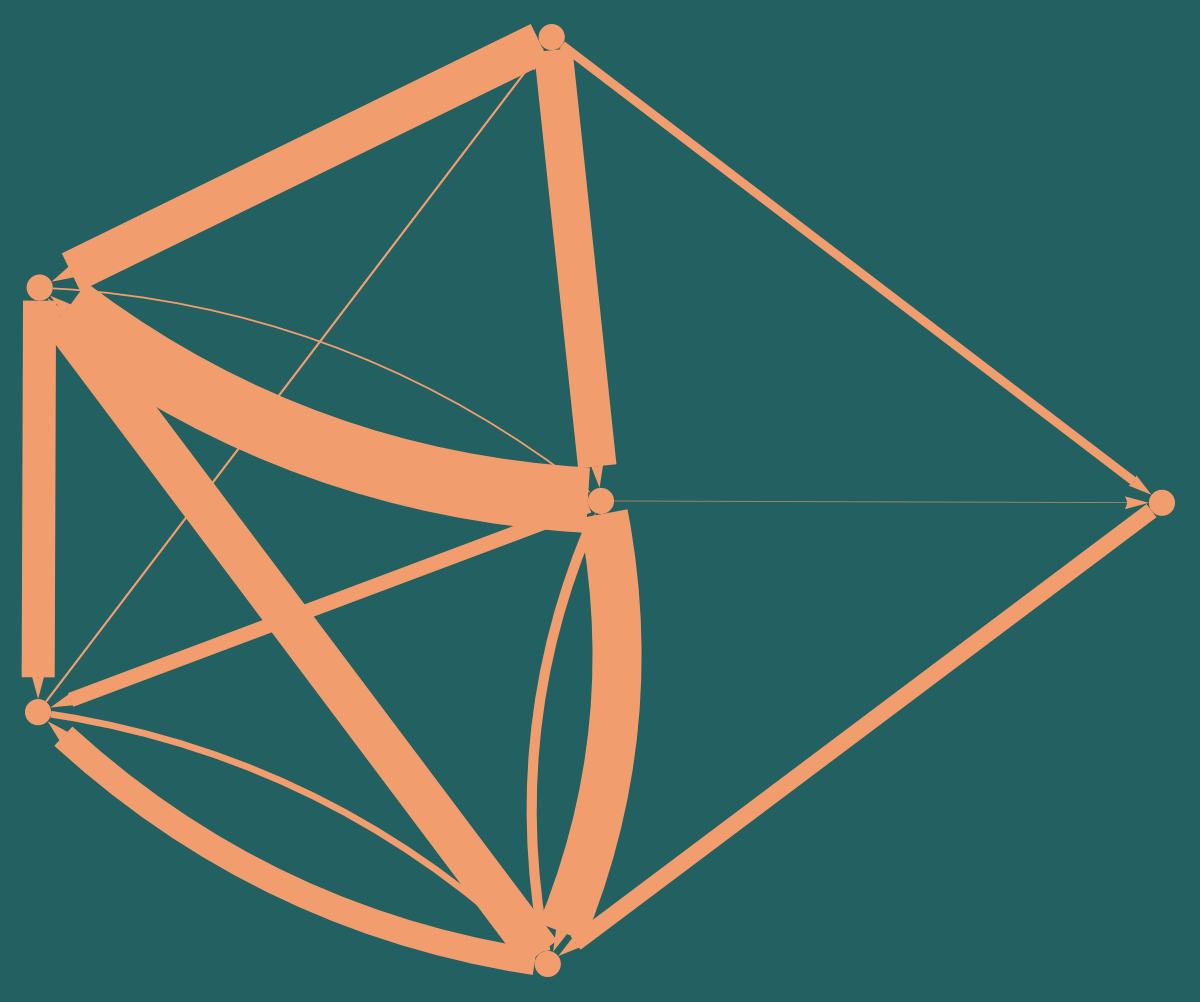
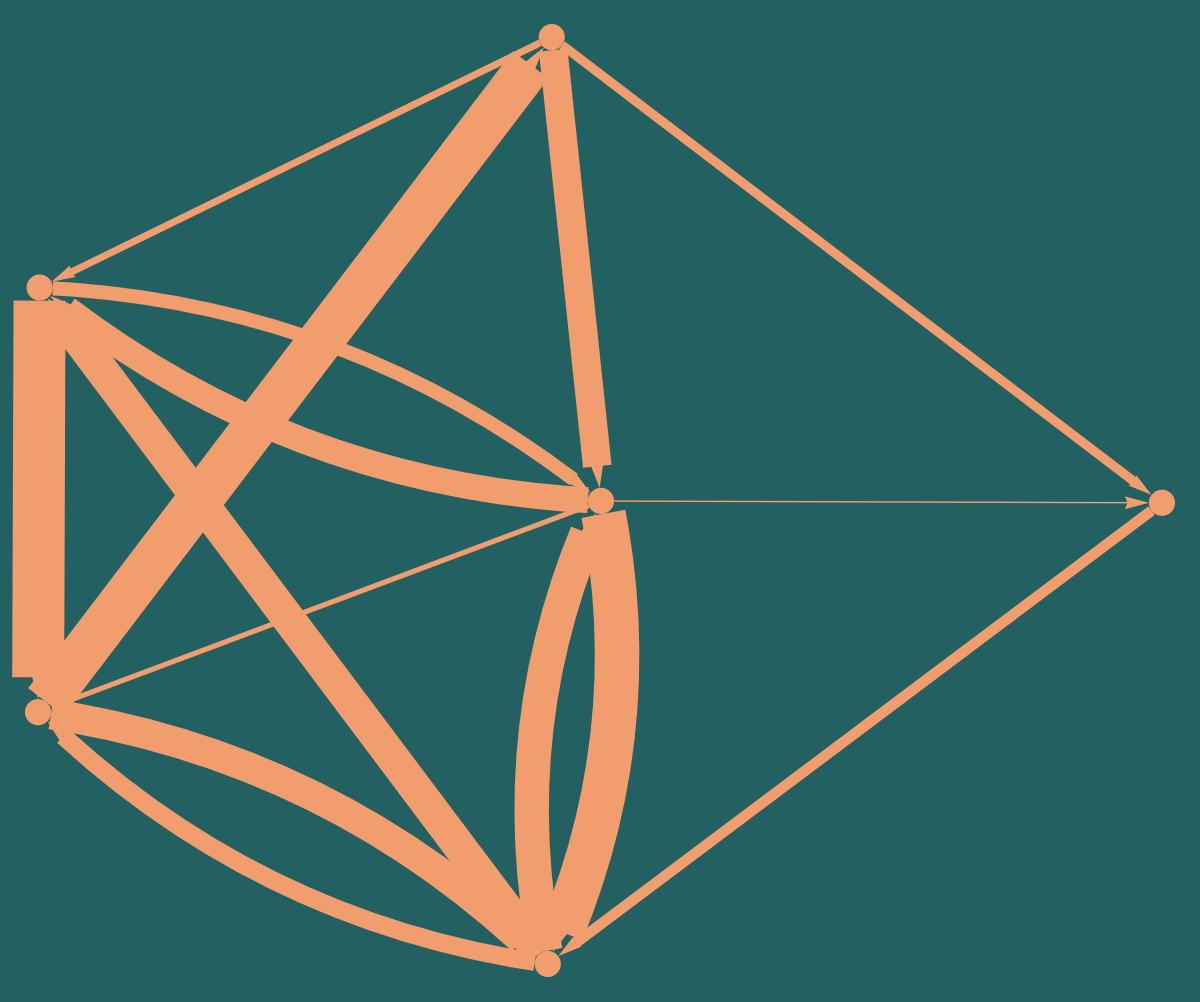
Balancing Graphs
Define the unbalanced energy \(\operatorname{B}(A) := \|\mathrm{diag}([A,A^\ast])\|^2 = \sum \left(\|A_i\|^2 - \|A^i\|^2\right)^2\).
Let \(\mathscr{F}(A_0,0) = A_0, \frac{d}{dt}\mathscr{F}(A_0,t) = - \nabla \operatorname{B}(\mathscr{F}(A_0,t))\) be negative gradient flow of \(\operatorname{B}\).
Theorem [with Needham]
For any \(A_0 \in \mathbb{C}^{d \times d}\), the matrix \(A_\infty := \lim_{t \to \infty} \mathscr{F}(A_0,t)\) exists, is balanced, has the same eigenvalues and principal minors as \(A_0\), and has zero entries whenever \(A_0\) does.
If \(A_0\) is real, so is \(A_\infty\), and if \(A_0\) has all non-negative entries, then so does \(A_\infty\).
This is “local”: \(a_{ij}\) is updated by a multiple of \((\|A_j\|^2-\|A^j\|^2)-(\|A_i\|^2-\|A^i\|^2)\).
Balancing Graphs
Theorem [with Needham]
For any \(A_0 \in \mathbb{C}^{d \times d}\), the matrix \(A_\infty := \lim_{t \to \infty} \mathscr{F}(A_0,t)\) exists, is balanced, has the same eigenvalues and principal minors as \(A_0\), and has zero entries whenever \(A_0\) does.
If \(A_0\) is real, so is \(A_\infty\), and if \(A_0\) has all non-negative entries, then so does \(A_\infty\).
Balancing Graphs
Theorem [with Needham]
For any \(A_0 \in \mathbb{C}^{d \times d}\), the matrix \(A_\infty := \lim_{t \to \infty} \mathscr{F}(A_0,t)\) exists, is balanced, has the same eigenvalues and principal minors as \(A_0\), and has zero entries whenever \(A_0\) does.
If \(A_0\) is real, so is \(A_\infty\), and if \(A_0\) has all non-negative entries, then so does \(A_\infty\).
Balancing Graphs
Theorem [with Needham]
For any \(A_0 \in \mathbb{C}^{d \times d}\), the matrix \(A_\infty := \lim_{t \to \infty} \mathscr{F}(A_0,t)\) exists, is balanced, has the same eigenvalues and principal minors as \(A_0\), and has zero entries whenever \(A_0\) does.
If \(A_0\) is real, so is \(A_\infty\), and if \(A_0\) has all non-negative entries, then so does \(A_\infty\).
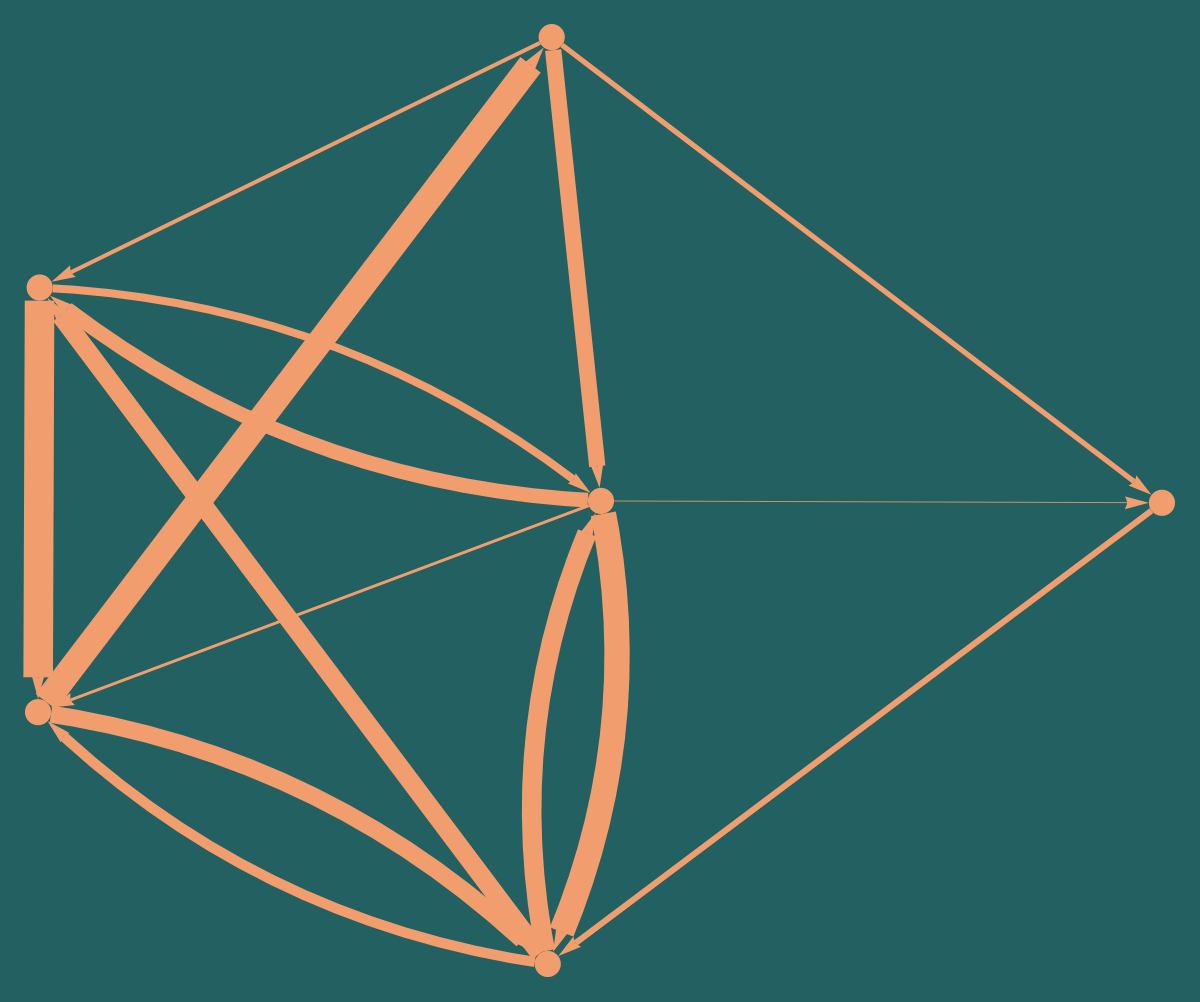
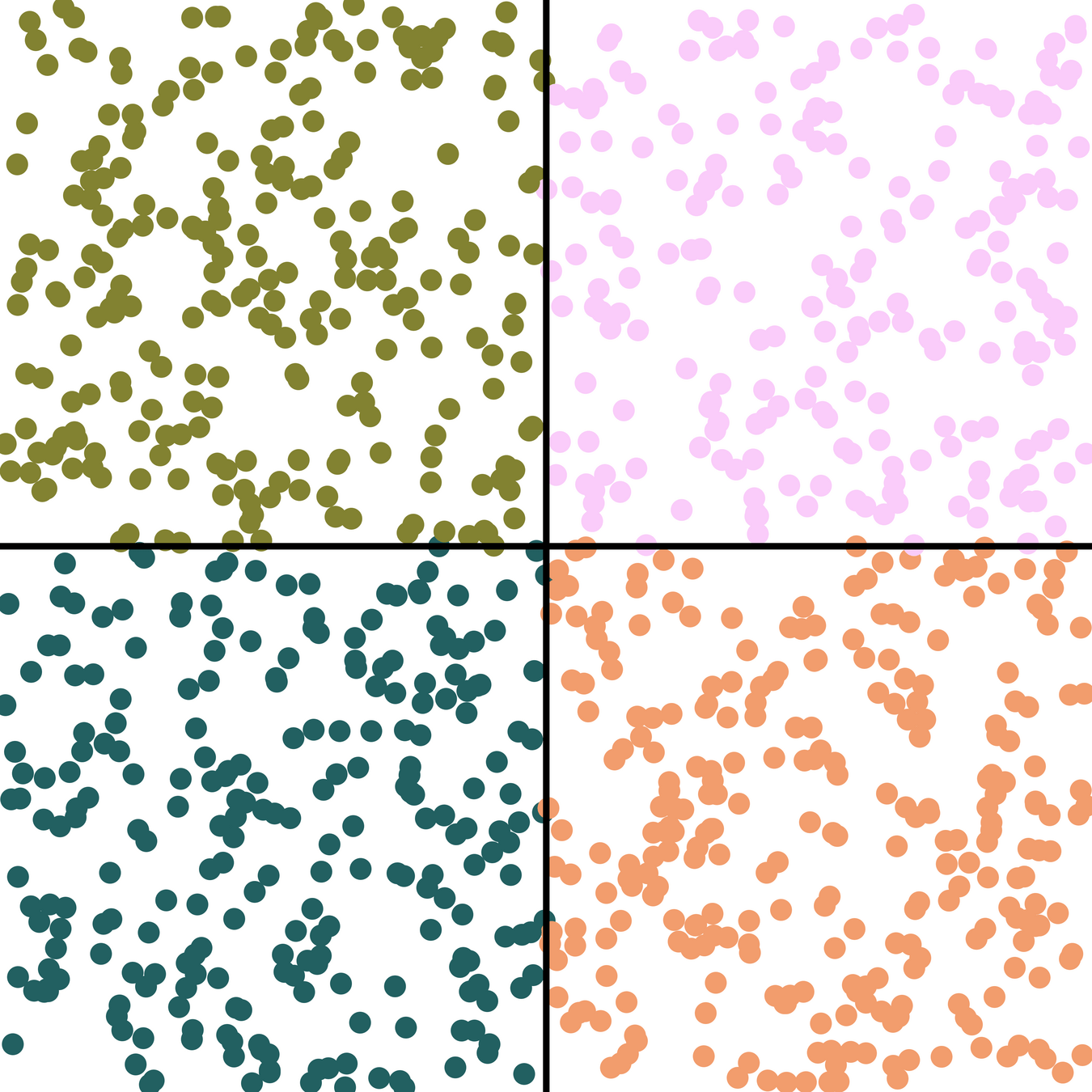
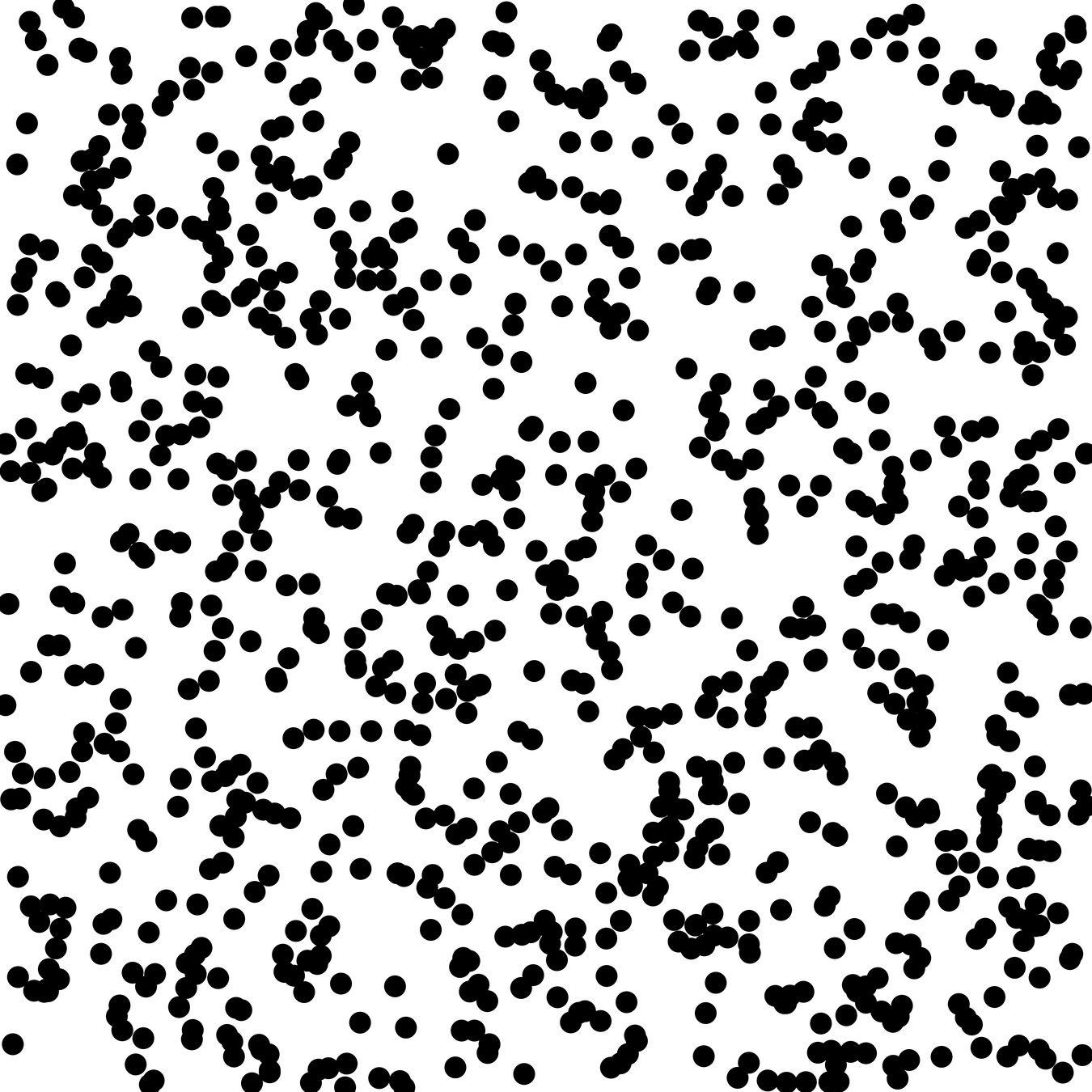
\(\|A\|^2=1\)
\(\|A\|^2=0.569\)
Balancing Graphs
Theorem [with Needham]
For any \(A_0 \in \mathbb{C}^{d \times d}\), the matrix \(A_\infty := \lim_{t \to \infty} \mathscr{F}(A_0,t)\) exists, is balanced, has the same eigenvalues and principal minors as \(A_0\), and has zero entries whenever \(A_0\) does.
If \(A_0\) is real, so is \(A_\infty\), and if \(A_0\) has all non-negative entries, then so does \(A_\infty\).
Balancing Graphs
Theorem [with Needham]
For any \(A_0 \in \mathbb{C}^{d \times d}\), the matrix \(A_\infty := \lim_{t \to \infty} \mathscr{F}(A_0,t)\) exists, is balanced, has the same eigenvalues and principal minors as \(A_0\), and has zero entries whenever \(A_0\) does.
If \(A_0\) is real, so is \(A_\infty\), and if \(A_0\) has all non-negative entries, then so does \(A_\infty\).
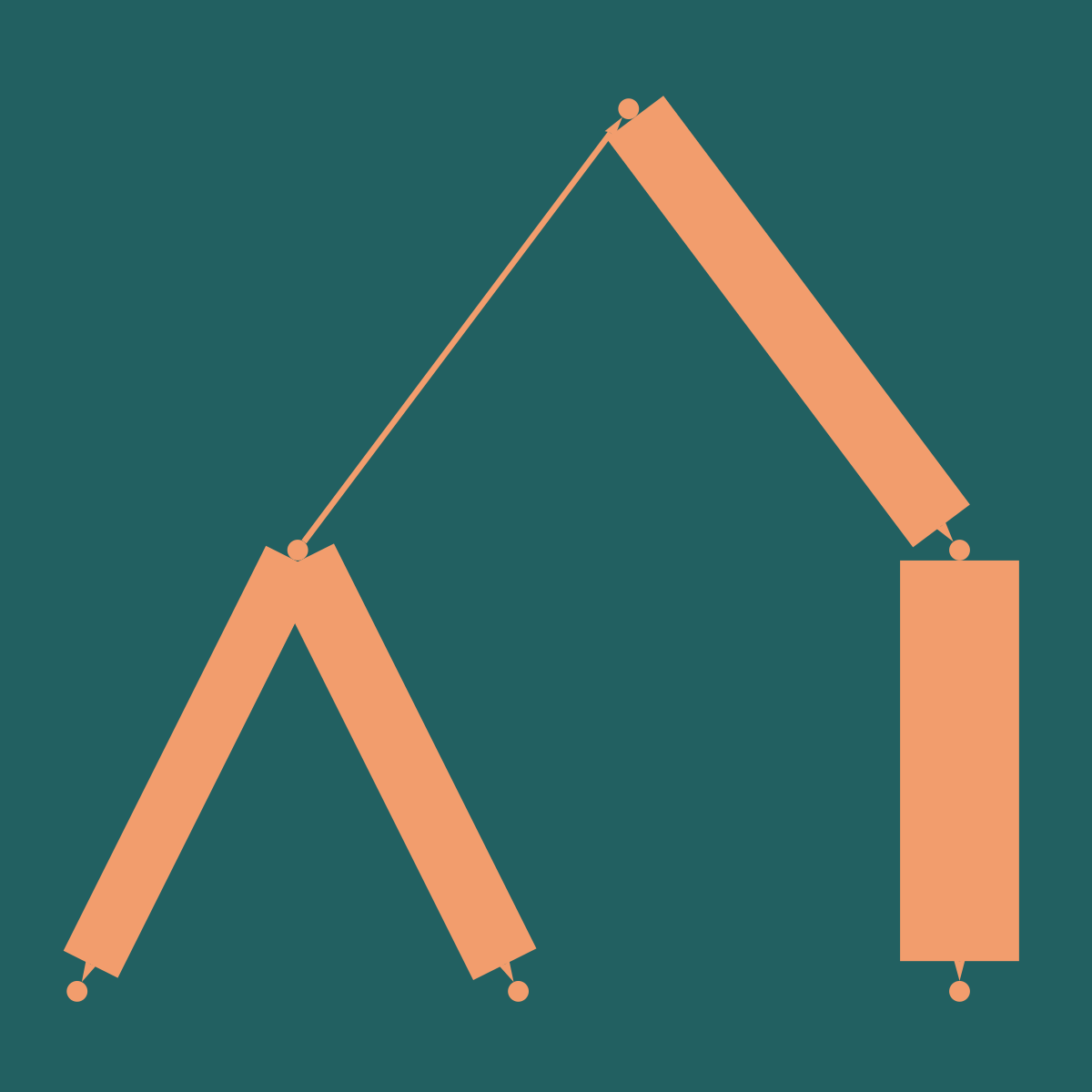
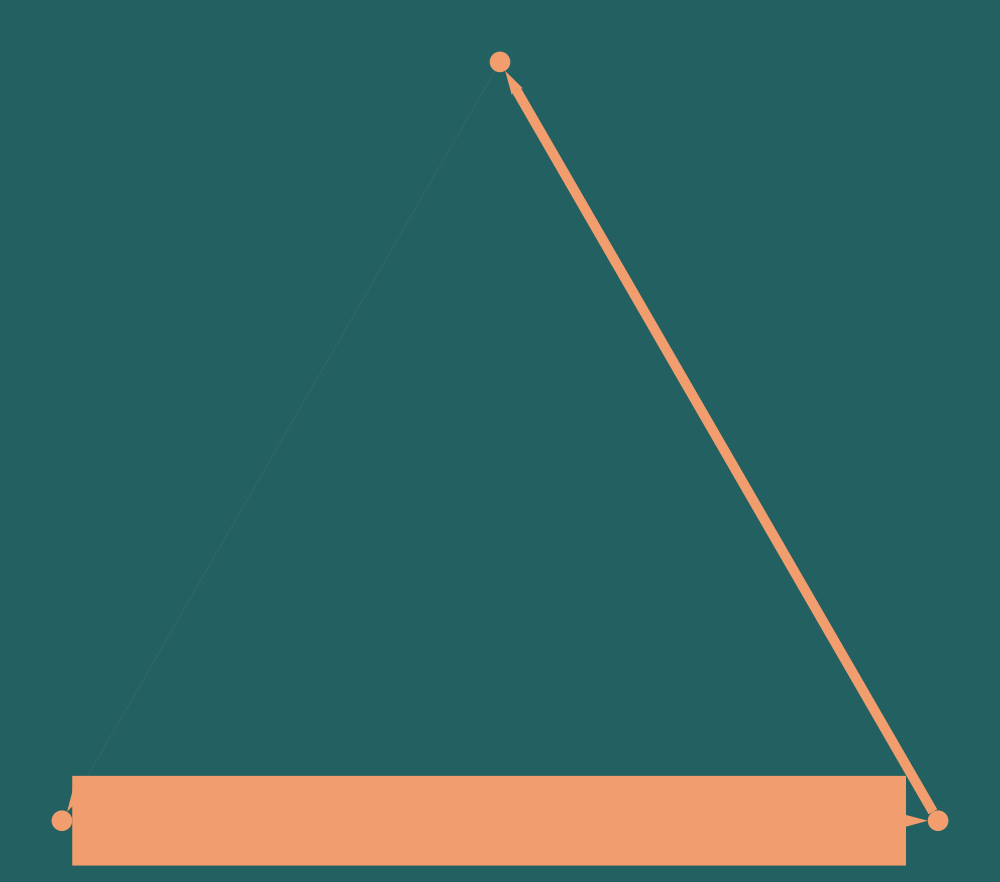
Preserving Weights
By doing gradient flow \(\overline{\mathscr{F}}\) on the unit sphere, we can preserve weights:
Theorem [with Needham]
For any non-nilpotent \(A_0 \in \mathbb{C}^{d \times d}\) with \(\|A\|^2=1\), the matrix \(A_\infty := \lim_{t \to \infty} \overline{\mathscr{F}}(A_0,t)\) exists, is balanced, has Frobenius norm 1, and has zero entries whenever \(A_0\) does.
If \(A_0\) is real, so is \(A_\infty\), and if \(A_0\) has all non-negative entries, then so does \(A_\infty\).
Preserving Weights
By doing gradient flow \(\overline{\mathscr{F}}\) on the unit sphere, we can preserve weights:
Theorem [with Needham]
For any non-nilpotent \(A_0 \in \mathbb{C}^{d \times d}\) with \(\|A\|^2=1\), the matrix \(A_\infty := \lim_{t \to \infty} \overline{\mathscr{F}}(A_0,t)\) exists, is balanced, has Frobenius norm 1, and has zero entries whenever \(A_0\) does.
If \(A_0\) is real, so is \(A_\infty\), and if \(A_0\) has all non-negative entries, then so does \(A_\infty\).
Preserving Weights
By doing gradient flow \(\overline{\mathscr{F}}\) on the unit sphere, we can preserve weights:
Theorem [with Needham]
For any non-nilpotent \(A_0 \in \mathbb{C}^{d \times d}\) with \(\|A\|^2=1\), the matrix \(A_\infty := \lim_{t \to \infty} \overline{\mathscr{F}}(A_0,t)\) exists, is balanced, has Frobenius norm 1, and has zero entries whenever \(A_0\) does.
If \(A_0\) is real, so is \(A_\infty\), and if \(A_0\) has all non-negative entries, then so does \(A_\infty\).
Preserving Weights
By doing gradient flow \(\overline{\mathscr{F}}\) on the unit sphere, we can preserve weights:
Theorem [with Needham]
For any non-nilpotent \(A_0 \in \mathbb{C}^{d \times d}\) with \(\|A\|^2=1\), the matrix \(A_\infty := \lim_{t \to \infty} \overline{\mathscr{F}}(A_0,t)\) exists, is balanced, has Frobenius norm 1, and has zero entries whenever \(A_0\) does.
If \(A_0\) is real, so is \(A_\infty\), and if \(A_0\) has all non-negative entries, then so does \(A_\infty\).
Applications?
Equal-Norm Parseval Frames
A spanning set \(f_1, \dots , f_n \in \mathbb{C}^d\) is a frame.
\(\Rightarrow F = [f_1 \cdots f_n] \in \mathbb{C}^{d \times n}\)
Definition.
\(\{f_1,\dots, f_n\}\subset \mathbb{C}^d\) is a Parseval frame if \(\operatorname{Id}_{d\times d}=FF^*=f_1f_1^*+\dots+f_nf_n^*\).
An equal-norm Parseval frame (ENP frame) is a Parseval frame \(f_1,\dots , f_n\) with \(\|f_i\|^2=\|f_j\|^2\) for all \(i\) and \(j\).
\(\sum \|f_i\|^2=\operatorname{tr}F^*F=\operatorname{tr}FF^*=\operatorname{tr}\operatorname{Id}_{d \times d} = d\), so each \(\|f_i\|^2=\frac{d}{n}\).
Frame Potential
Definition [Benedetto–Fickus, Casazza–Fickus]
The frame potential is
\(\operatorname{FP}(F) = \|FF^\ast\|_{\operatorname{Fr}}^2\)
Proposition [cf. Welch]
The equal-norm Parseval frames are exactly the global minima of \(\operatorname{FP}|_{\text{equal norm}}\).
Theorem [Benedetto–Fickus]
As a function on equal-norm frames with fixed \(d\) and \(n\), \(\operatorname{FP}\) has no spurious local minima.
Frame Potential
Optimization
Theorem [with Mixon, Needham, and Villar; FFT 2021 video]
On the space of equal-norm frames, consider the initial value problem
\(\Gamma(F_0,0) = F_0, \qquad \frac{d}{dt}\Gamma(F_0,t) = -\operatorname{grad}\operatorname{FP}(\Gamma(F_0,t))\).
If \(F_0\) has full spark, then \(\lim_{t \to \infty} \Gamma(F_0,t)\) is an ENP frame.
Theorem [with Needham; CodEx 2022 video]
Same for fusion frames.
Frame Energy
Definition [Bodmann–Casazza]
The frame energy is
\(\operatorname{FE}(F) = \sum_{j,k} \left( \|f_j\|^2 - \|f_k\|^2\right)^2 = 2n \sum_j \|f_j\|^4 -2d^2\)
Proposition [Bodmann–Haas]
The equal-norm Parseval frames are exactly the global minima of \(\operatorname{FE}|_{\text{Parseval}}\).
Theorem [Caine]
On the space of Parseval frames, consider the initial value problem
\(\widetilde{\Gamma}(F_0,0) = F_0 \qquad \frac{d}{dt}\widetilde{\Gamma}(F_0,t) = -\operatorname{grad} \operatorname{FE}(\widetilde{\Gamma}(F_0,t))\).
If \(F_0\) is full spark, then \(\lim_{t \to \infty} \widetilde{\Gamma}(F_0,t)\) is an ENP frame.
Frame potential: \(\operatorname{FP}(F) = \|FF^\ast\|_{\operatorname{Fr}}^2\)
Frame energy: \(\operatorname{FE}(F) = 2n \sum_j \|f_j\|^4 -2d^2\)
Frame energy: \(\operatorname{FE}(F) = \sum_j \|f_j\|^4\)
Total Frame Energy
Definition.
For \(\vec{r} \in \mathbb{R}_+^n\), the total frame energy of a frame is
\(E_{\vec{r}}(F) :=\|FF^* - \mathbb{I}_d \|_{\text{Fr}}^2 + \frac{1}{4}\sum_j \left(\frac{\|f_j\|^2}{r_j}-1 \right)^2\)
Proposition.
The Parseval frames with \(\|f_j\|^2 = r_j\) for \(j=1,\dots , n\) are exactly the global minima of \(E_{\vec{r}}\).
Variations on a Theme
Theorem [with Caine and Needham]
Let \(\vec{r} \in \mathbb{Q}_+^n\) such that \(\operatorname{PF}_d^{\mathbb{K}}(\vec{r}) \neq \emptyset\). Consider
\(\Gamma_{\vec{r}}(F_0,0) = F_0,\quad \frac{d}{dt} \Gamma_{\vec{r}}(F_0,t) = -\nabla E_{\vec{r}}(\Gamma_{\vec{r}}(F_0,t))\).
If \(F_0 \in \mathbb{K}^{d \times n}\) is full spark, then \(\lim_{t \to \infty} \Gamma_{\vec{r}}(F_0,t)\) is in \(\operatorname{PF}_d^{\mathbb{K}}(\vec{r})\).
Definition.
For \(\mathbb{K} \in \{\mathbb{R}, \mathbb{C}\}\) and \(\vec{r} \in \mathbb{R}_+^n\), let \(\operatorname{PF}^{\mathbb{K}}_d(\vec{r})\) be the space of Parseval frames \(F \in \mathbb{K}^{d \times n}\) with \(\|f_i\|^2 = r_i\).
\(\vec{r}\) is admissible
Variations on a Theme
Theorem [with Caine and Needham]
Let \(\vec{r} \in \mathbb{Q}_+^n\) such that \(\operatorname{PF}_d^{\mathbb{K}}(\vec{r}) \neq \emptyset\). Consider
\(\Gamma_{\vec{r}}(F_0,0) = F_0,\quad \frac{d}{dt} \Gamma_{\vec{r}}(F_0,t) = -\nabla E_{\vec{r}}(\Gamma_{\vec{r}}(F_0,t))\).
If \(F_0 \in \mathbb{K}^{d \times n}\) is full spark, then \(\lim_{t \to \infty} \Gamma_{\vec{r}}(F_0,t)\) is in \(\operatorname{PF}_d^{\mathbb{K}}(\vec{r})\).
Topology of Frame Spaces
Frame Homotopy Conjecture [Larson 2002]
The space of ENP frames is path-connected.
Theorem [Cahill, Mixon, Strawn 2017]
The Frame Homotopy Conjecture is true.
Theorem [with Needham 2022; CodEx 2021 video]
\(\operatorname{PF}_d^{\mathbb{H}}(\vec{r})\) is path-connected for all admissible \(\vec{r} \in \mathbb{R}_+^n\).
Theorem [with Needham 2021; CodEx 2021 video]
\(\operatorname{PF}_d^{\mathbb{C}}(\vec{r})\) is path-connected for all admissible \(\vec{r}\in \mathbb{R}_+^n\).
Theorem [Mare 2024]
\(\operatorname{PF}_d^{\mathbb{R}}(\vec{r})\) is path-connected for certain \(\vec{r}\) with entries repeating in special patterns.
Theorem [Mare 2025]
\(\operatorname{PF}_d^{\mathbb{C}}(\vec{r})\) is simply-connected for admissible \(\vec{r} \in \mathbb{R}_+^n\) so that all \(r_{i_1} + \dots + r_{i_{n-k}} \geq 1\).
Topology from Optimization
Meta-Theorem
Gradient flow of \(E_{\vec{r}}\) gives a deformation retract of \(\mathbb{K}^{d \times n} \backslash \mathcal{U}_{\vec{r}}\) onto \(\operatorname{PF}_d^{\mathbb{K}}(\vec{r})\).
Corollary [with Caine and Needham]
Let \(q \in \mathbb{Z}_{\geq 0}\) and
\(d \geq \begin{cases} q+2 & \text{if } \mathbb{K}= \mathbb{R}\\ \frac{q+2}{2} & \text{if } \mathbb{K} = \mathbb{C}.\end{cases}\)
Then the space of ENP frames is \(q\)-connected for all \(n \geq \frac{d}{d-1}(d+q+1)\).
Corollary [with Caine and Needham]
Let \(d \geq 2\). Then there exists \(\epsilon > 0\) so that, for any admissible \(\vec{r} \in \mathbb{Q}_+^n\) with \(\left|r_i - \frac{d}{n}\right| < \epsilon\) for all \(i\), the space \(\operatorname{PF}_d^{\mathbb{R}}(\vec{r})\) is path-connected.
Questions
Can we characterize exactly when \(\operatorname{PF}_d^{\mathbb{R}}(\vec{r})\) is path-connected?
Theorem [Kapovich–Millson 1995]
\(\operatorname{PF}_2^{\mathbb{R}}(\vec{r})/(SO(2) \times O(1)^n)\) is disconnected if and only if there exist \(i,j,k\) so that \(r_i + r_j > 1\), \(r_j + r_k > 1\), and \(r_k + r_i > 1\). (Note: if \(\vec{r}\) is admissible, \(r_1 + \dots + r_n = 2\).)
What about other frame operators?
Can these methods be made numerically tractable?
What happens when \(\vec{r}\) is not admissible?
What other loss functions of interest fit this framework?
Thank you!
shonkwiler.org/codex26
Reference
Geometric approaches to matrix normalization and graph balancing
Tom Needham and Clayton Shonkwiler
Forum of Mathematics, Sigma 13 (2025), e149
Optimization and the topology of spaces of Parseval frames
Anthony Caine, Tom Needham, and Clayton Shonkwiler