Interactions Multi-Échelles
Sinan Haliyo
Habilitation à Diriger des Recherches
6 décembre 2019
|
Depuis 2005 Maître de Conférences; ISIR, Sorbonne Université |
|
2002 - 2005 ATER, LRP ,UPMC; Ingénieur, CEA-LIST |
|
1999 - 2002 Ph.D LRP, UPMC; dir. J.-C. Guinot, S. Régnier, "Les forces d'adhésion pour la micromanipulation" |
|
1996 - 1999 DEA Robotique; UPMC, ENSAM Licence & Maîtrise Génie Méca; UPMC, ENS Cachan |
Enseignement
depuis 1999 à l’UFR d’Ingénierie – 200h/an en moyenne

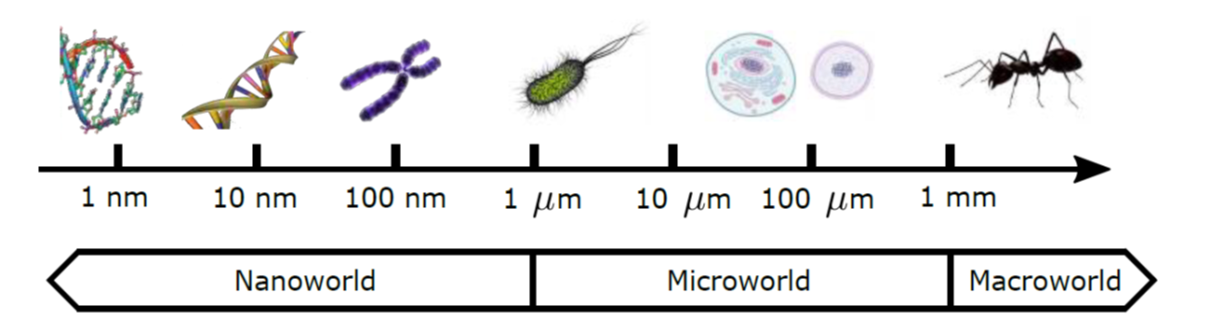
La Microrobotique
Dimensions des échantillons
Précision & résolution des
forces et déplacements
milli, micro, nano,pico, femto...
Physique
Mécanique
Rapports des forces
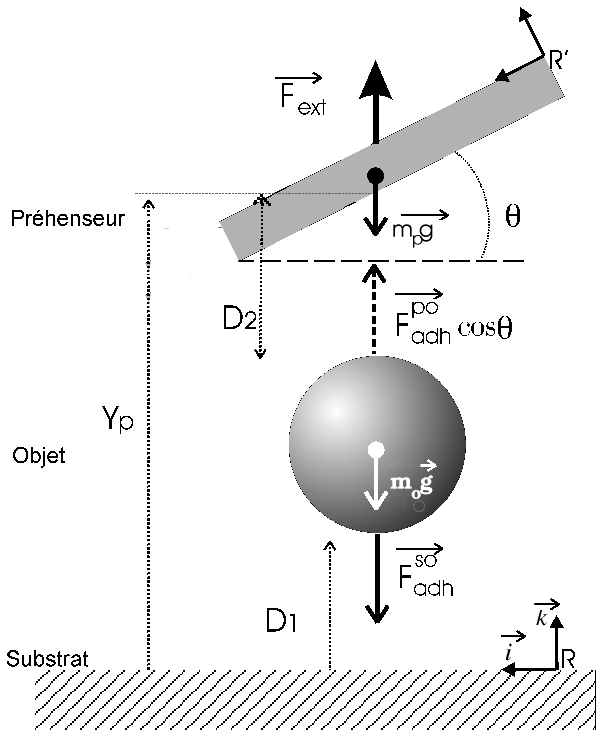
Adhésion
Inerties vs Viscosité
Surface > Volume
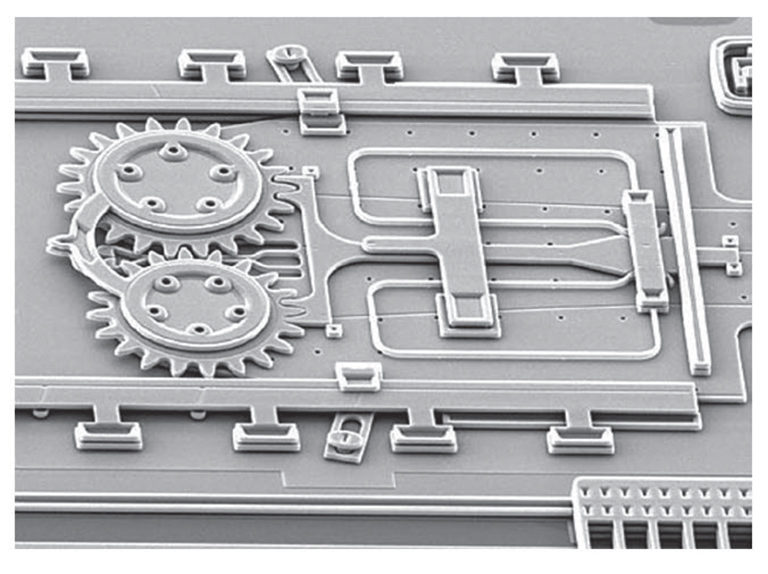
Micromanipulation Interactive
- Miniaturisation
- MOEMS
- Caractérisation
- Mesures Physiques
Exploration - Analyse - Assemblage

Outils Robotiques & Technologie
Outils de préhension, sondes
Actionneurs / Capteurs
Interfaces Humaines
Observation & Interaction
Utilisabilité

Conception des systèmes de
micromanipulation
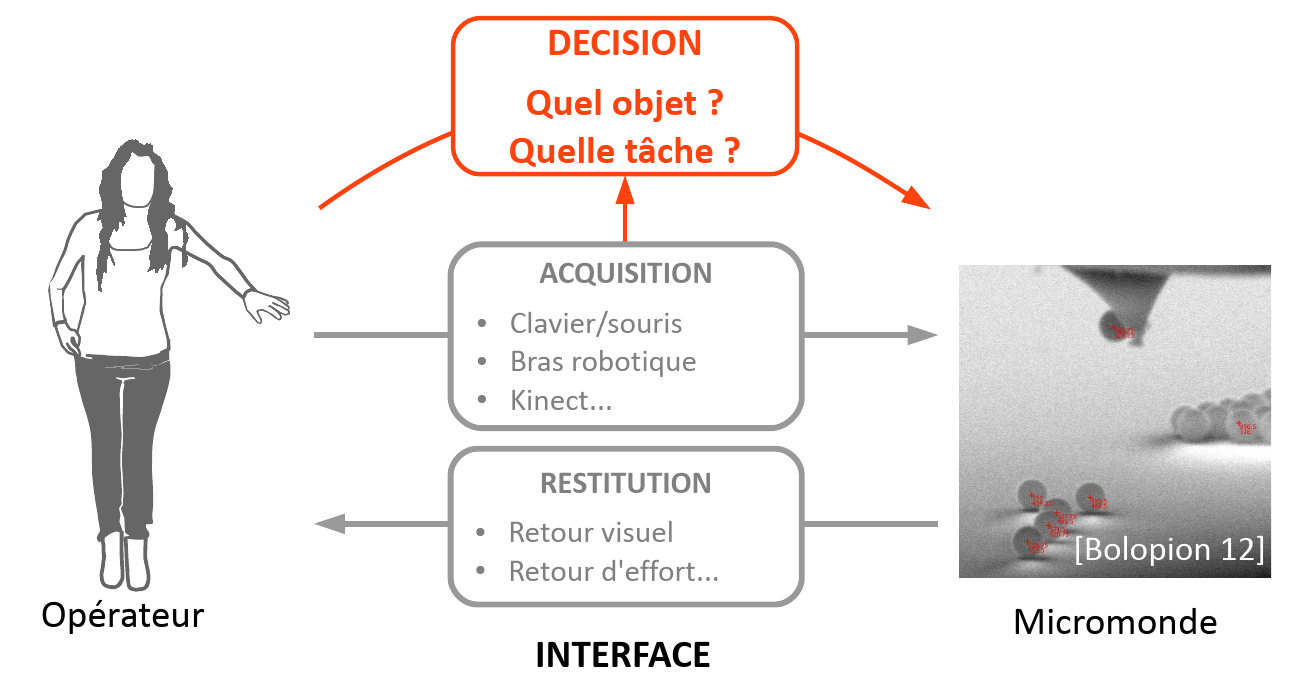
Comment mieux associer l'opérateur à la tâche ?
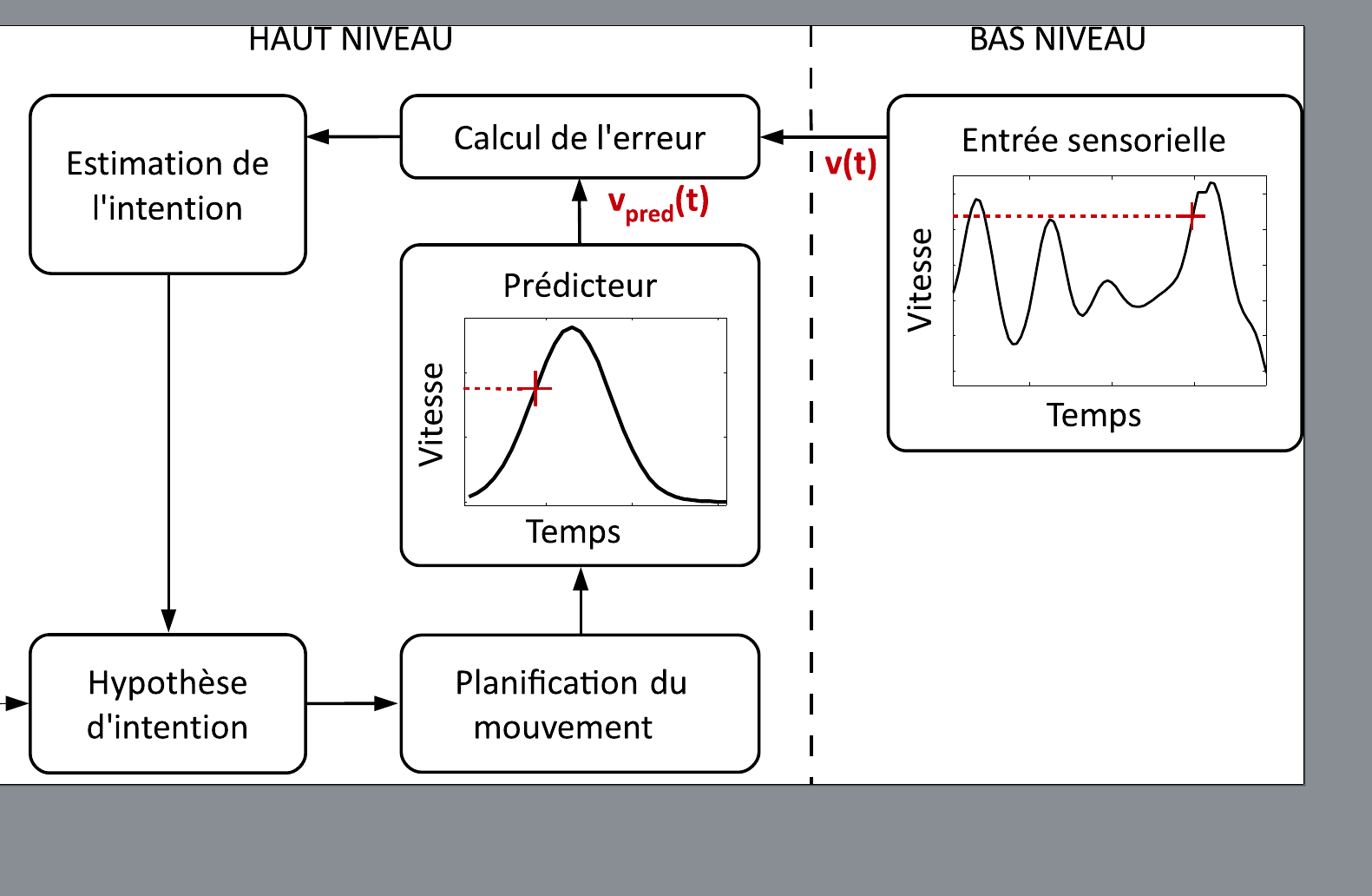
Profiter de la boucle de contrôle humain sensorimoteur
Acceptation des systèmes,
Utilisabilité des interfaces
Téléopération
à retour d'effort
HAPTIQUE
IHM
Téléopération Trans-Échelle
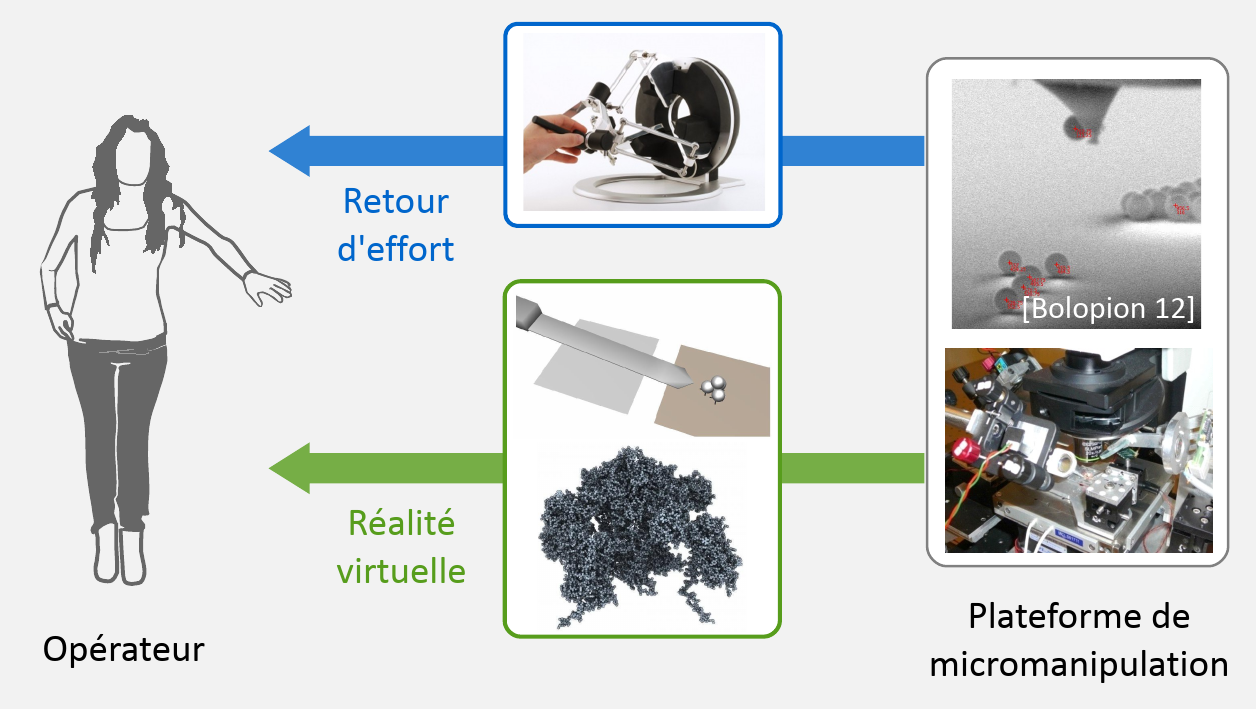
-
Facteurs d’échelle : 10 à 10E6
-
Choix des E/S
Transparence & Stabilité
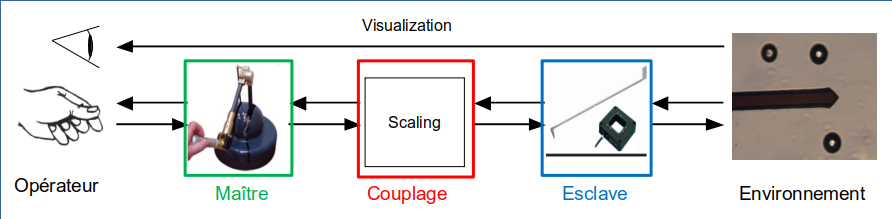
Chaîne de Téléopération
Téléop Directe
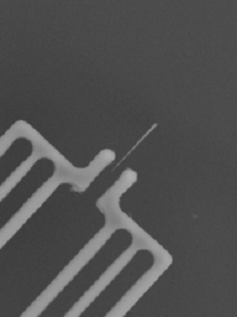
Manipulation par AFM
Microscopie Optique
Pollen d'Ambroisie Ø 10 µm
Téléop Augmentée
Manipulation sous MEB
CNTs 10 µm x Ø 30 nm
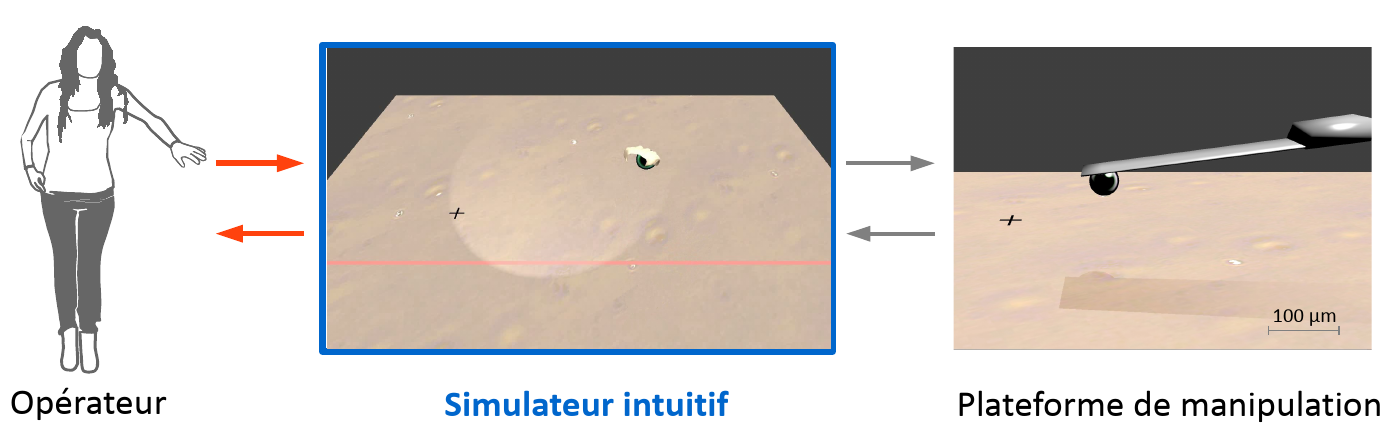
Simulation temps-réel
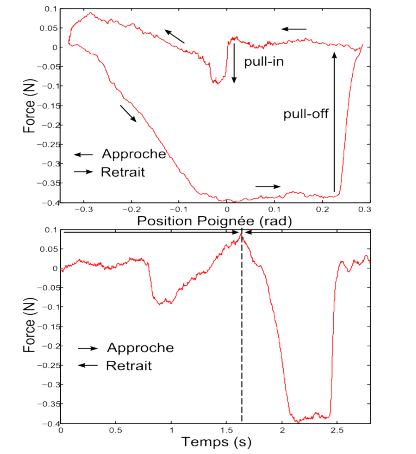
Premières démonstrations de télé-micromanipulation à retour d'effort
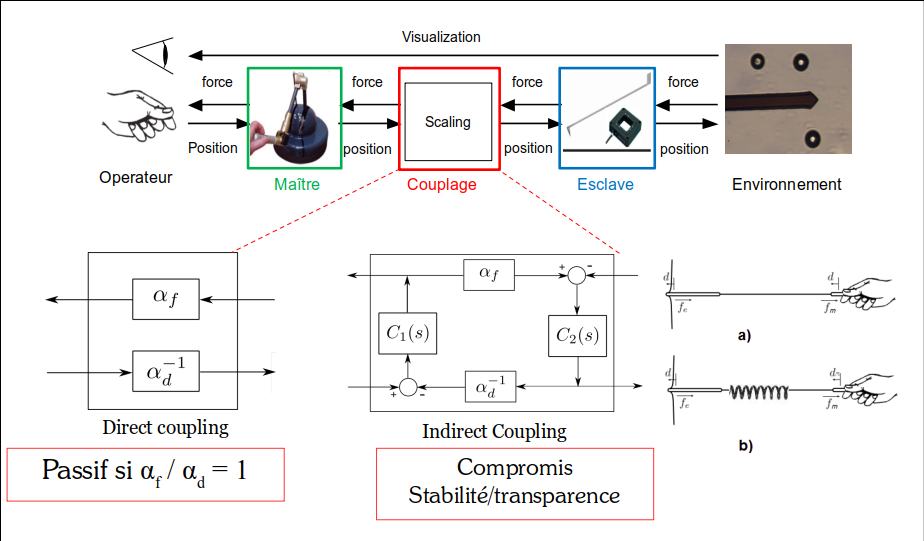
Paramétrage du couplage bilatéral indirect pour garantir
la stabilité
Dégradation de la transparence

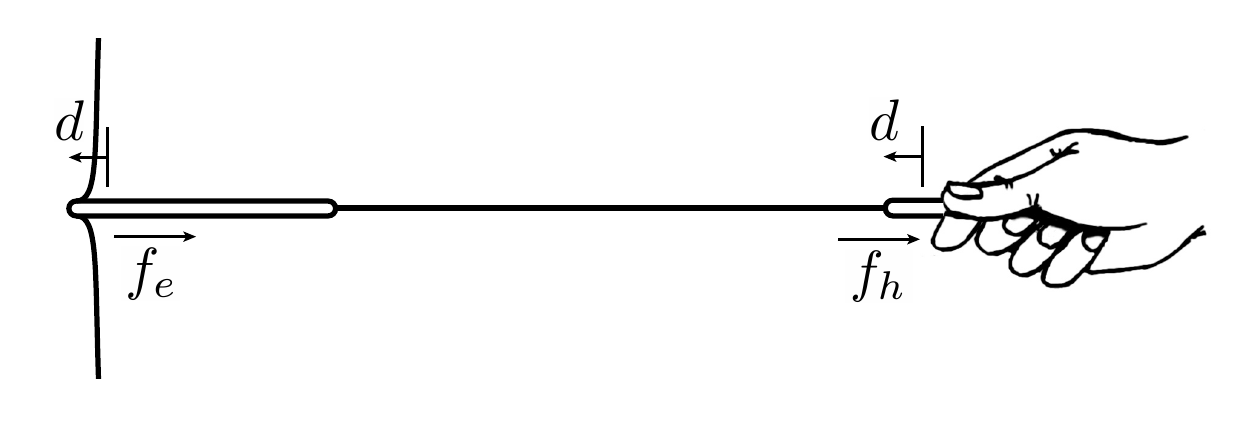
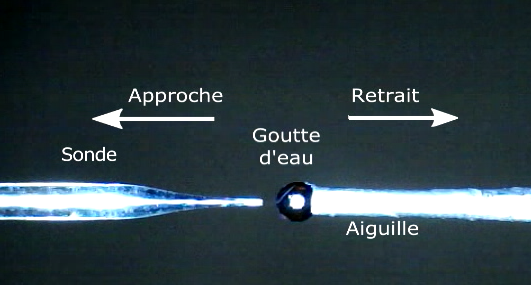
Microscopie Haptique
Sonde ≡ Main d'opérateur
Amplification linéaire des phénomènes
Sources de détérioration de la transparence
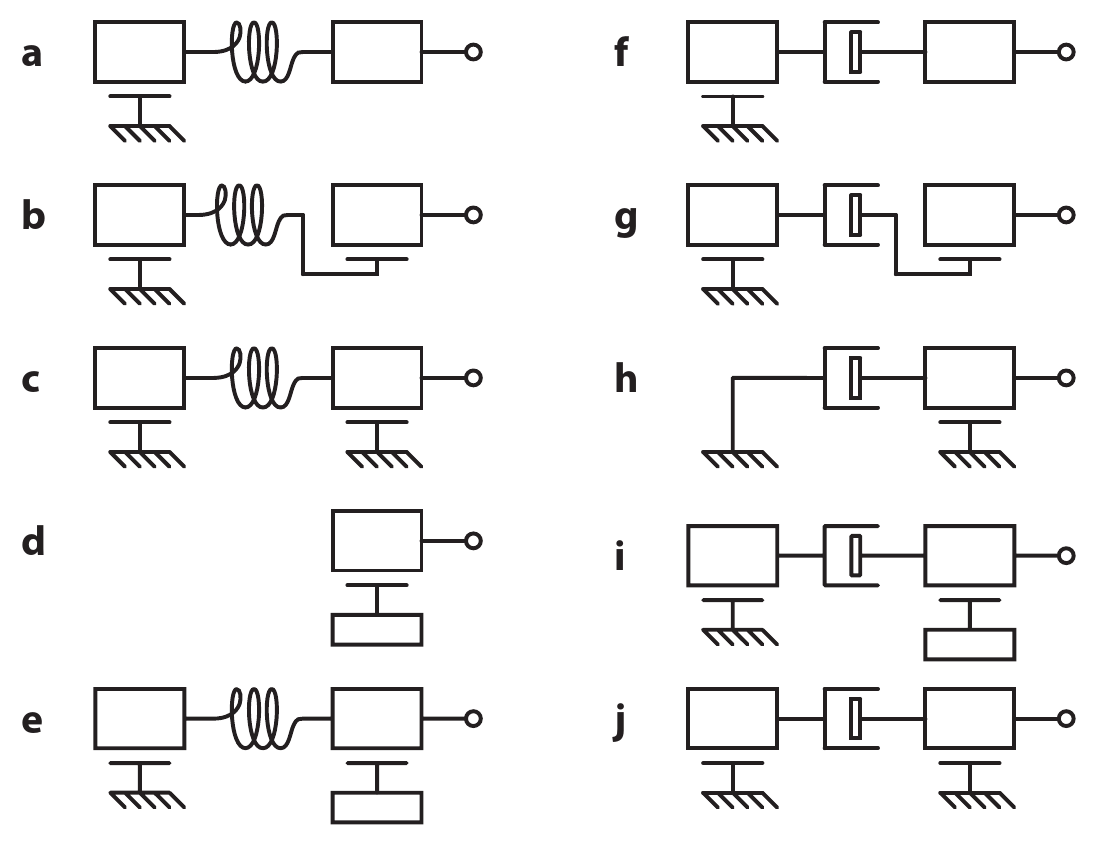
Réponses mécaniques du maître et de l'esclave
Couplage indirect
Éléments passive connectés
Couplage direct, sans dissipation
Chaîne de téléopération
passive et transparente
Concevoir maître et esclave tel que
leur réponse ne soit pas affectée par
leurs propriétés mécaniques
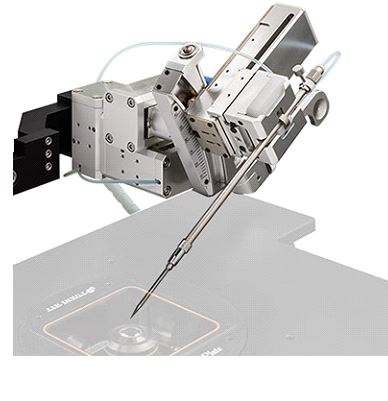
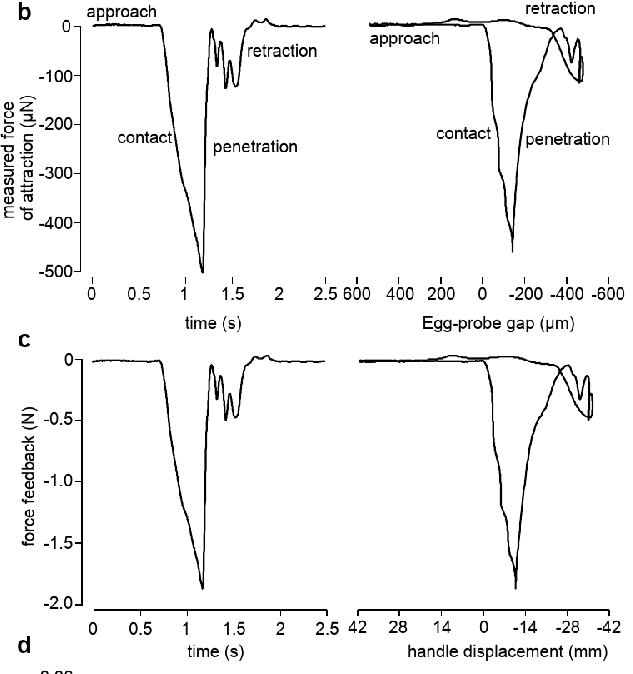
Étude de la sonde
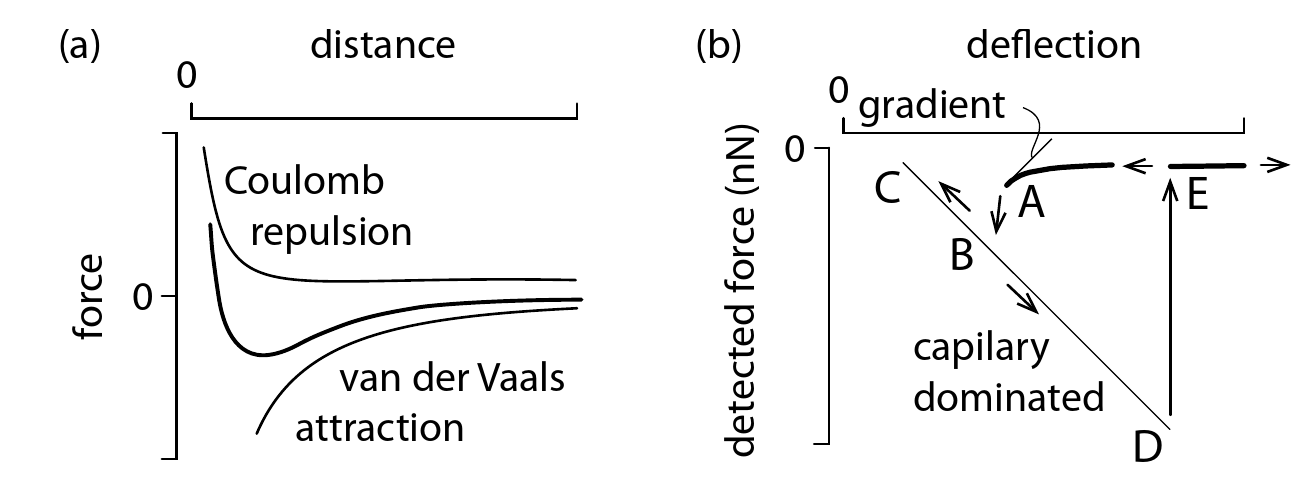
Réponse de l'AFM ≠ interaction observée
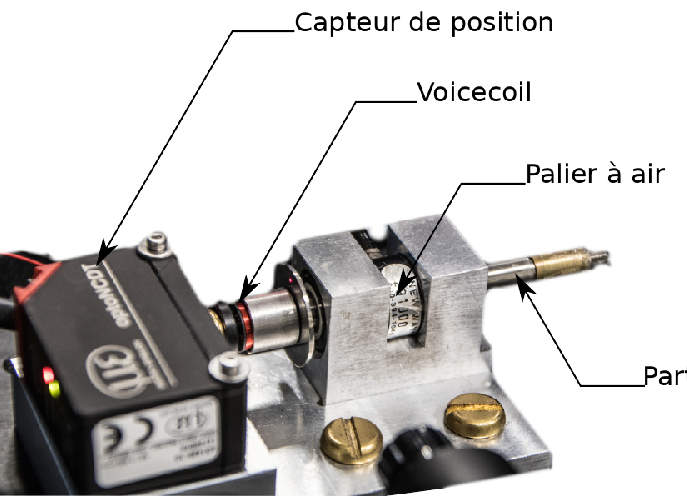
Un Capteur Transparent
Mesure par compensation
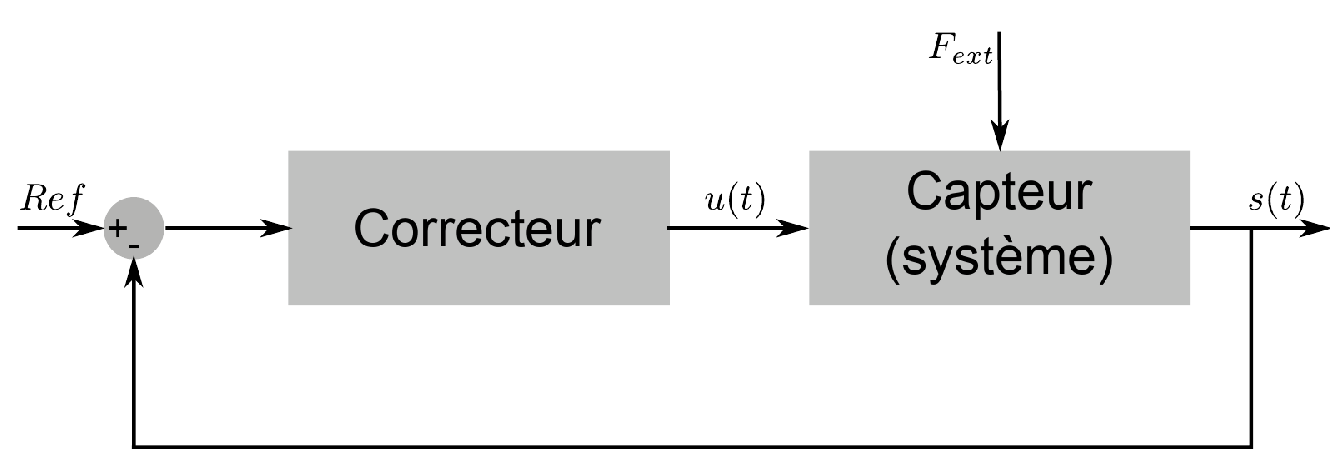
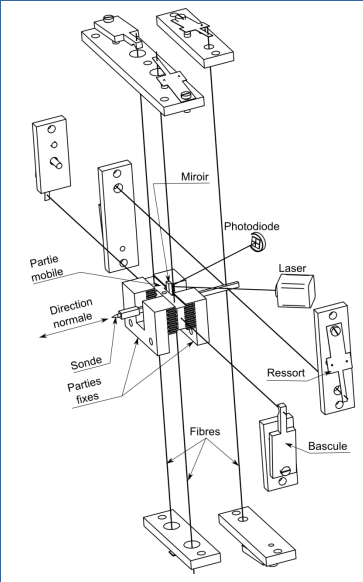
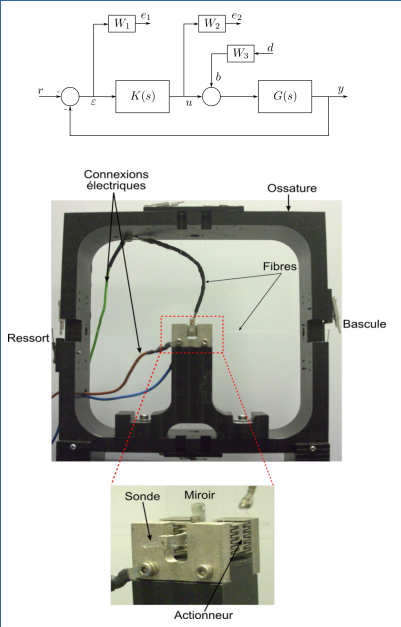
- Mesure directe 1 ddl
- Contrôle actif
- Actionnement électrostatique
- Sans contact
- Réponse linéaire
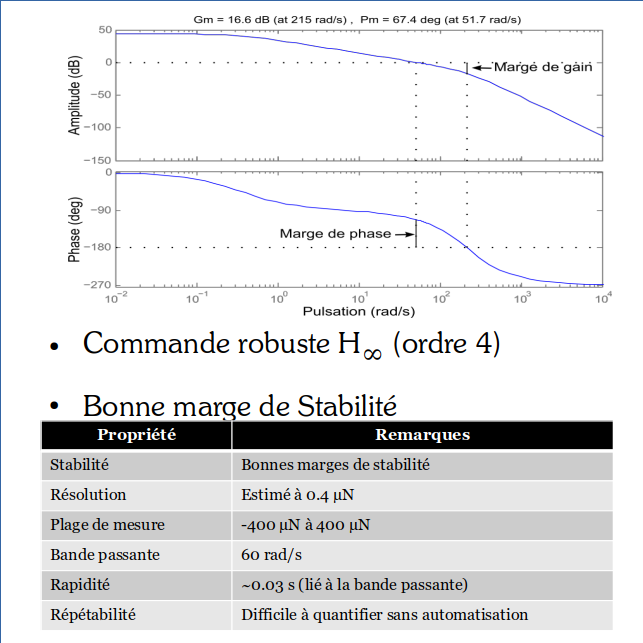
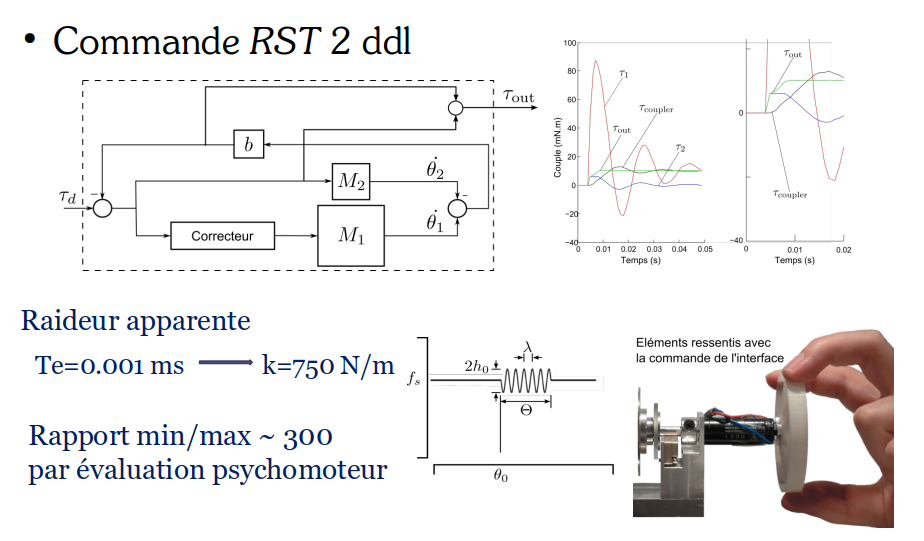
Haptique Haute-Fidélité
Masse nulle
Rigidité infinie
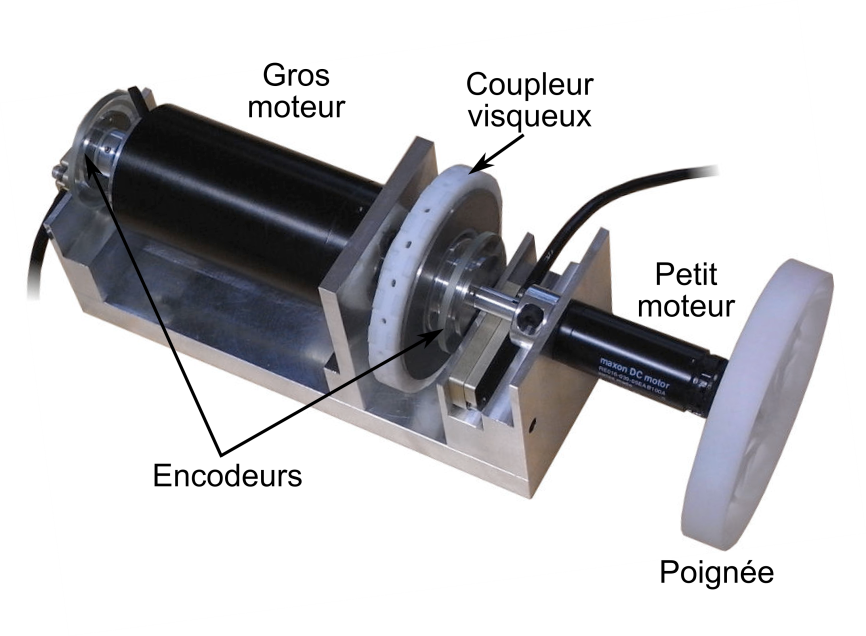
Assemblage double actionneur
Éliminer l'inertie
Augmenter le couple

Couplage Direct Passif
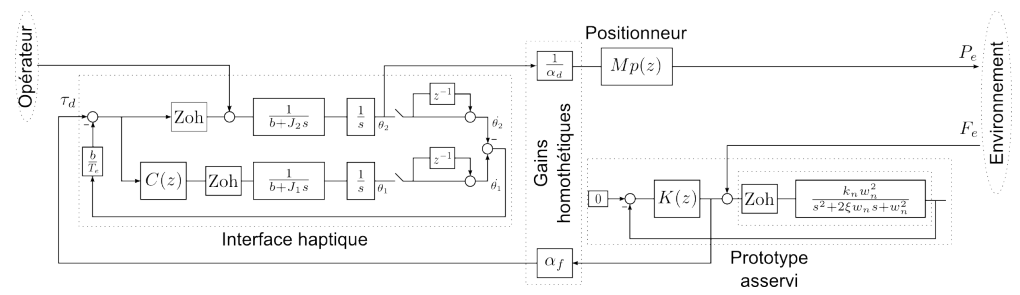


Amplification linéaire
des interactions réelles
Prochaine Génération
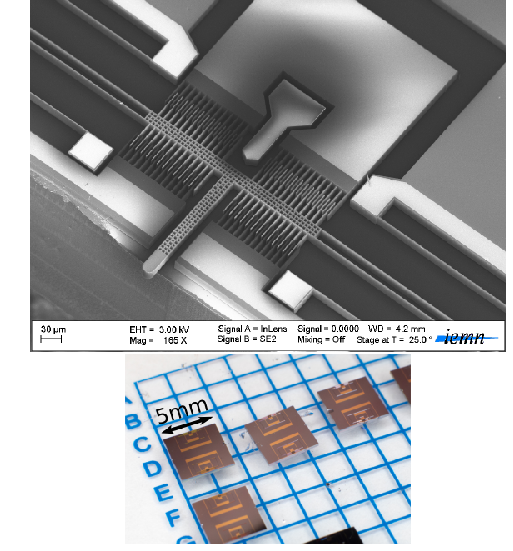
Capteur MEMS
Capteur Meso sans raideur
Humain dans la boucle
Proposer des interfaces plus intuitives / naturelles
Conception centrée "humain"
Évaluation psychosensorielle
Analyse du comportement et de la perception

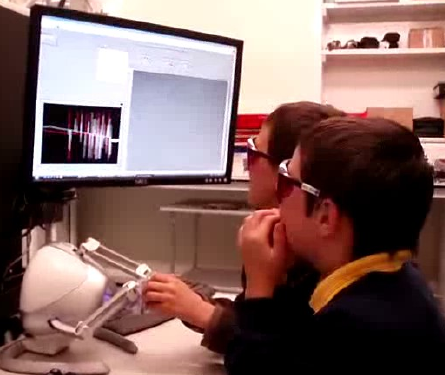

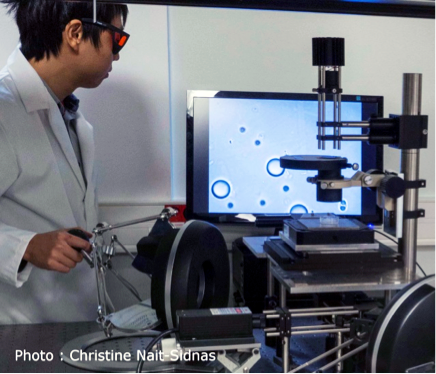
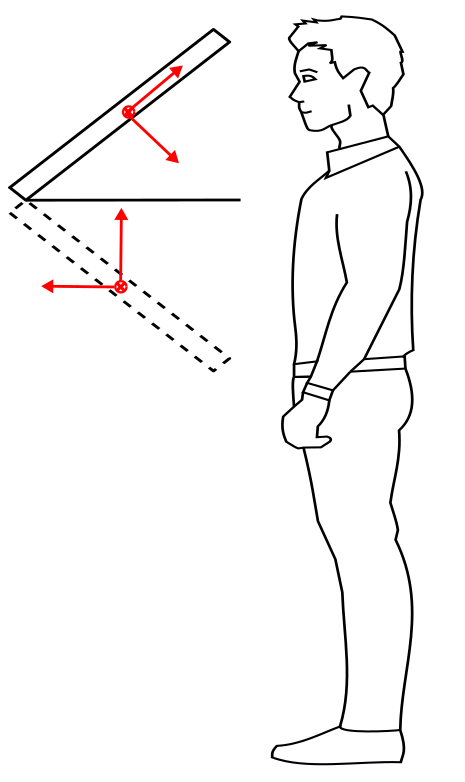
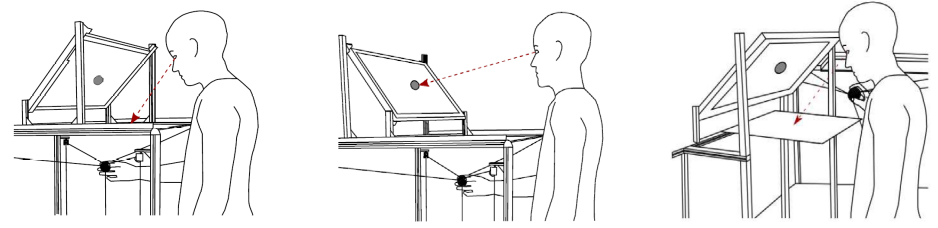
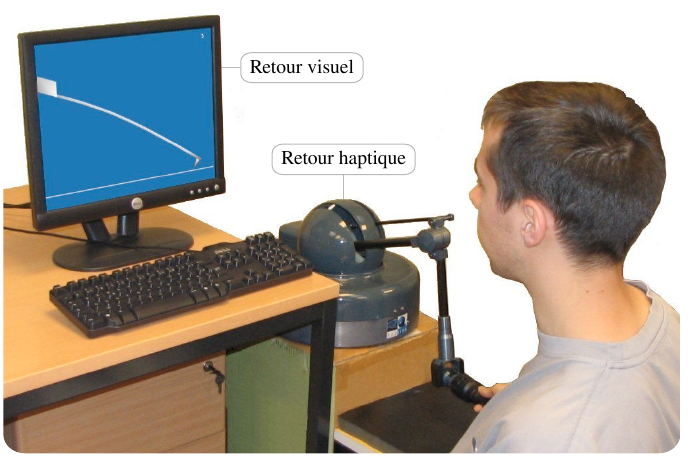
Interface visio-haptique colocalisée
What you see is what you touch
Affichage par reflection
Head-Tracking
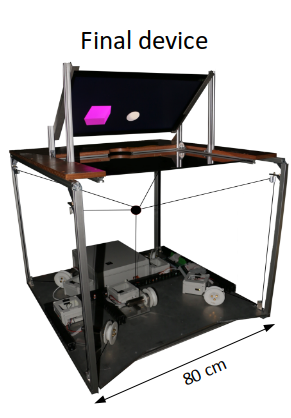
Robot à 5 câbles redondant
Commande par impédance
Espace de travail 30cm3
5N isométrique
FishTank
Évaluation Utilisateur
Apport de la colocalisation sur la dextérité
Exploration
Manipulation
Étude de l'intégration des modalités visuelles et haptiques
Interface dématérialisée
Détection d'intention
Analyses psychoperceptives
Projets en Cours
IOTA: Interactive Optical Tweezers
ANR 2016 - 2020, Coordinateur
COLAMIR: Collaborative Agile Miniaturized
Robotics for assembly
ANR 2016 - 2020, Responsable pour l'ISIR

Pinces Optiques Interactives
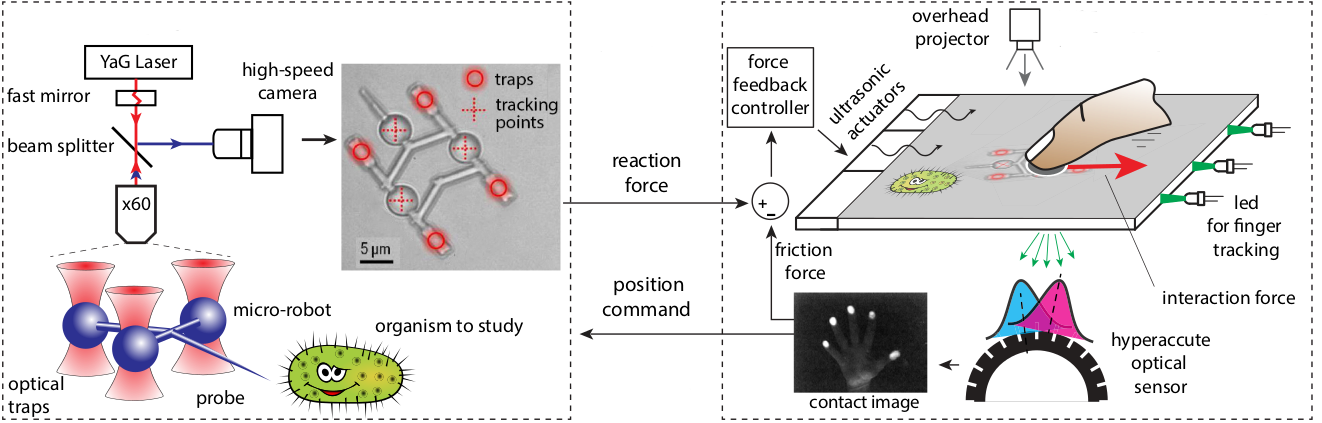
ISIR / Sorbonne
ISM / Aix - Marseille
Optical Tweezers
- Objets piégés par un rayon laser
(1 - 5 µm) - Manipulation sans contact
- Forces jusqu'à 300 pN
- Mesure de forces 3D
- Camera événementiel
- Bande passante kHz


Chemin Optique Robotisé
Multitrap OPTOBOTS

Expériences de mécano-biologie avec Instituts Pasteur & Curie
Couplage FishTank
Spin-off avec SATT Lutech
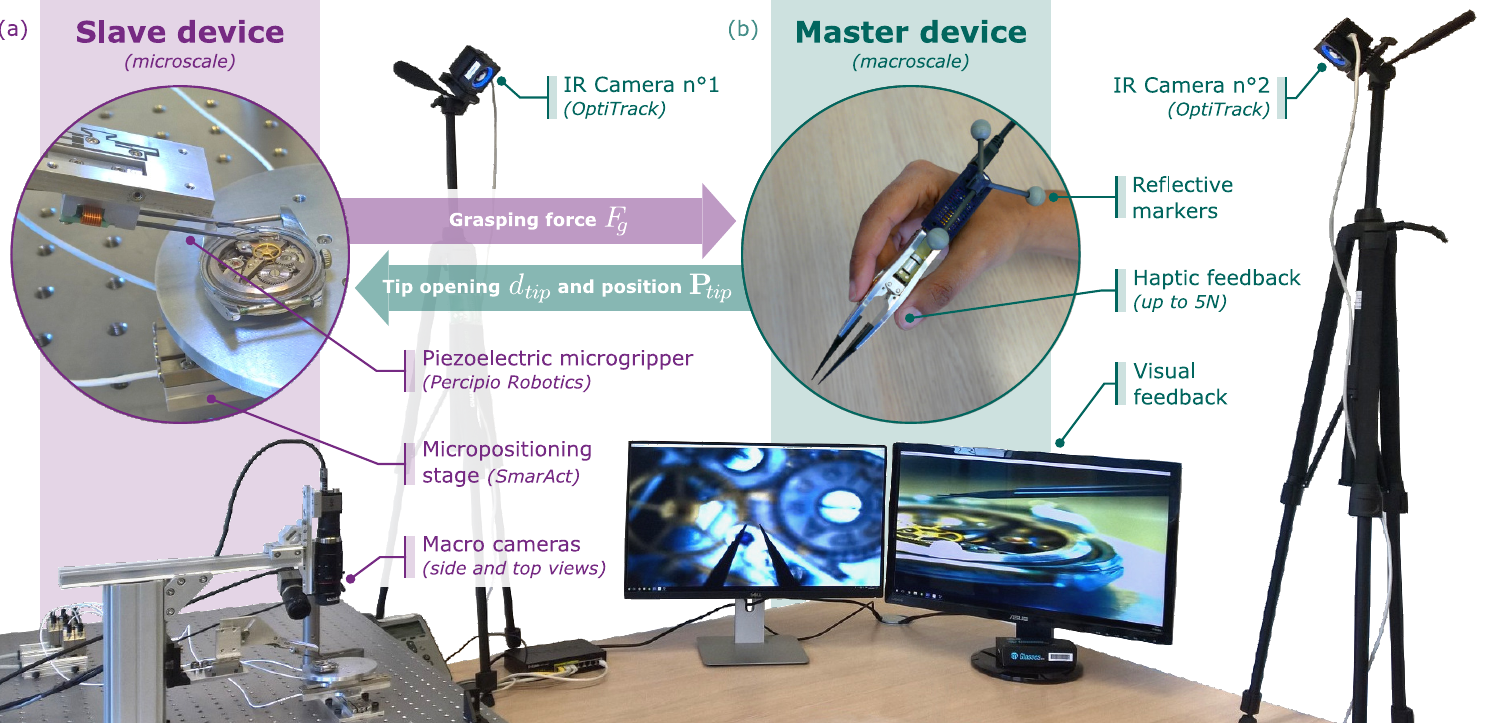
Interfaces H/M pour le microassemblage
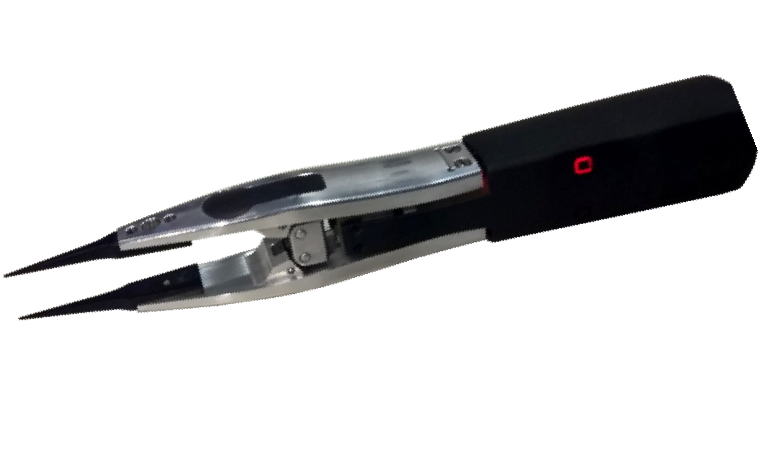
Pinces Brucelles Actives
40 grammes, 16 cm
2.2 N / 5N Moteur CC
Accéléromètre, Jauges, Hall...
Electronique embarquée, PIC32
Alimentation externe


Comanipulation
Commande en effort de la saisie
Assistance et régulation
Téléopération
Commande d'un micromanipulateur
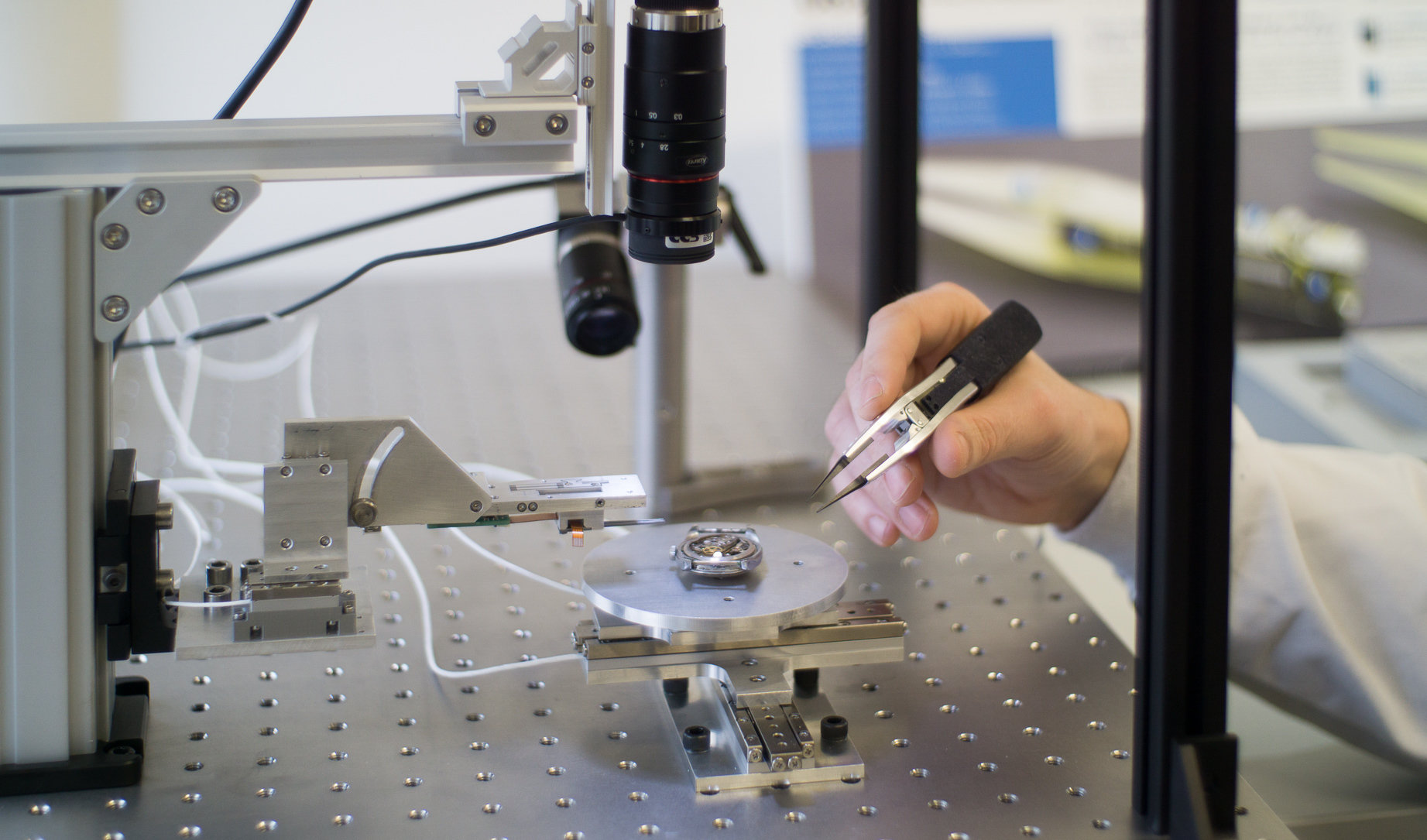
Projet de commercialisation avec
Perspectives
Équipe
Interactions Multi-Échelles
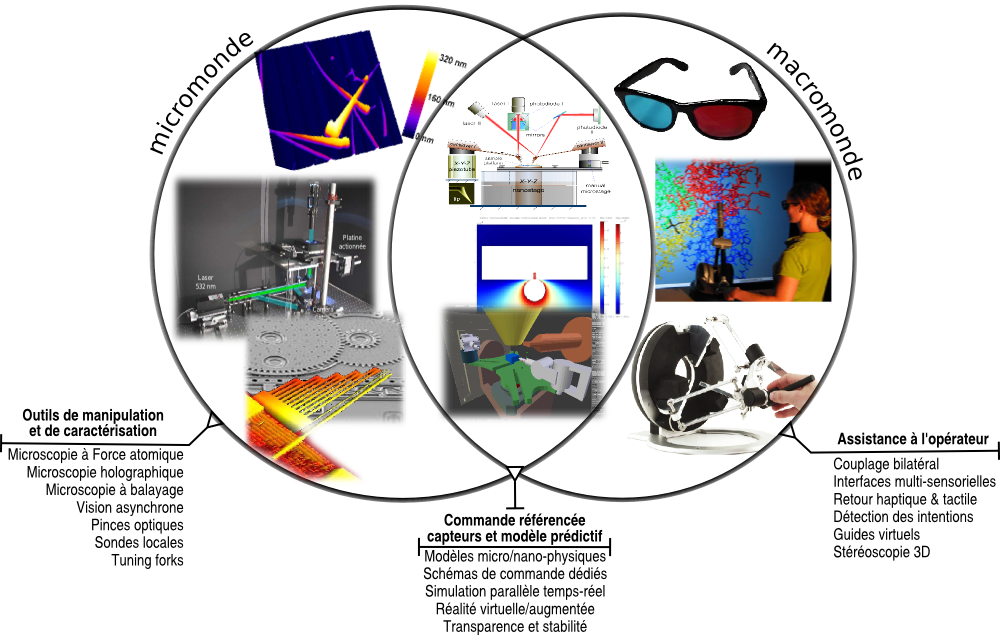
L’interaction de l’Homme avec des environnements physiques ou numériques par le développement de dispositifs matériels et des logiciels idoines pour rendre accessibles, perceptibles et manipulables les espaces intangibles comme le micromonde ou l’information brute.
L’haptique, la visualisation, la réalité virtuelle et augmentée en complément des systèmes robotiques pour concevoir et développer des interfaces plus efficaces, plus transparentes et plus adaptées, pour favoriser la cognition et la prise de décision de l’opérateur.
Meilleure compréhension du comportement humain et de l'environnement en s'intéressant aux modalités d’action, de perception et de commande à des échelles différentes allant de l’atelier intelligent et du bureau numérique jusqu’à la micromanipulation.
2018
Mokrane Boudaoud - Gilles Bailly - Yvonne Jansen
Vincent Hayward - Stéphane Régnier - David Gueroguiev
Rayonnement
115 Publications (34 journaux + 52 conf int + ... )
7 Brevets
12 Thèses co-encadrés + 5 en cours
AE pour Elsevier Mechatronics | 2016 - présent
Publication Chair MARSS | 2016 - présent
Chairs @ IARP, ISOT, CIRA, 3MNANO
Organisation ICRA'20
Publications 2019
Robotica
IEEE Transactions on Haptics
IEEE Robotics and Automation Letters
Journal of Micro-Bio Robotics
Medical Devices & Sensors
IEEE Access
MicroMachines
MARSS, ICRA
Yves Rollot, Fabien Dionnet, Julien Vitard, Maxime Girot, Hui Xie, Gentiane Venture, Mehdi Boukallel, Aude Bolopion, Guillaume Millet, Bruno Daunay, Bruno Sauvet, Laura Cohen, Juan Acosta, Ahlem Abbaci, Tianming Lu, Gilgueng Hwang, Abdenbi Mohand-Ousaid, Cécile Pacoret, Ali Oulmas, Alberto Ortega, Olivier Ameline, Antoine Weill-Duflos, Olga Petit, Fabien Caura, Justine Saint-Aubert, Camille Fradet, Edison Gerena, Sophia Sakr, Georges Daher, Ahmad Awde, Basil Duvernoy, Johan Quispe, Jonathan Caillez, Quentin François, Benoit Geslain, Flavien Lebrun, Florent Legendre, Basil Duvernoy, Thomas Daunizeau, Élodie Bouzbib, Hoang Nguyen, Barthélémy Cagneau, Jean Cognet, Mokrane Boudaoud, Gilles Bailly, Yvonne Jansen, Vincent Hayward, Stéphane Régnier