Projet ANR- 16-CE33-0002
Interactive
Optical Tweezers
with Tactile Feedback

Sinan HALIYO, Ph.D, Associate Professor, is the project coordinator. He's the leader of 'Multi-scale Interactions' group at ISIR/Sorbonne.
Michaël WIERTLEWSKI, Ph.D, was a CNRS researcher at the Etienne-Jules Marey Institute.
The Consortium




Edison GERENA
PhD Candidate
ISIR/Sorbonne
Florent LEGENDRE
Engineer
ISIR/Sorbonne
Nicolas HULOUX
PhD Candidate
ISM/AMU

Stéphane Violet, Thibaut Raharijaona
Stéphane Régnier, Vincent Hayward

Julien
DIPERI
Engineer
ISM/AMU
Touching the microworld
What if you could touch objects smaller then the width of your hair and perceive their universe ?

This is the aim of IOTA Project, funded by ANR France. We are using the power of light to manipulate cells and molecules, and let the user control and feel the interaction with his fingertips.
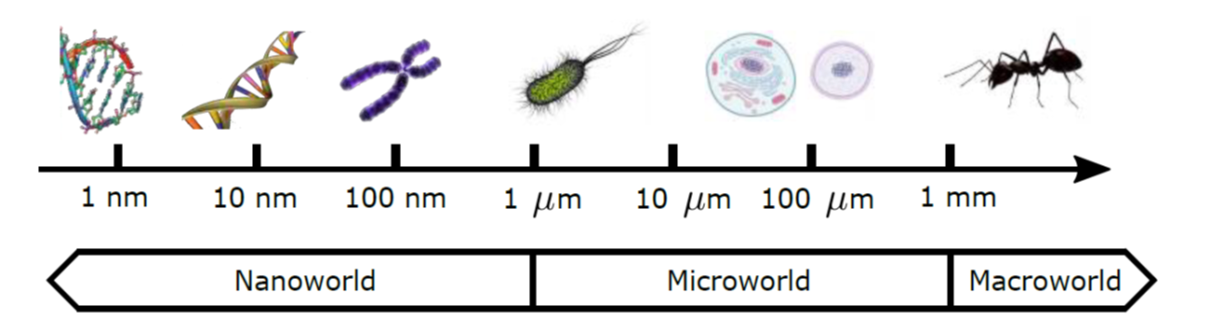
Fundamental mechanisms of the Universe stem from the microscale phenomena
Understanding and controlling small scales is the current challange in Physics, Biology, Chemistry & Engineering
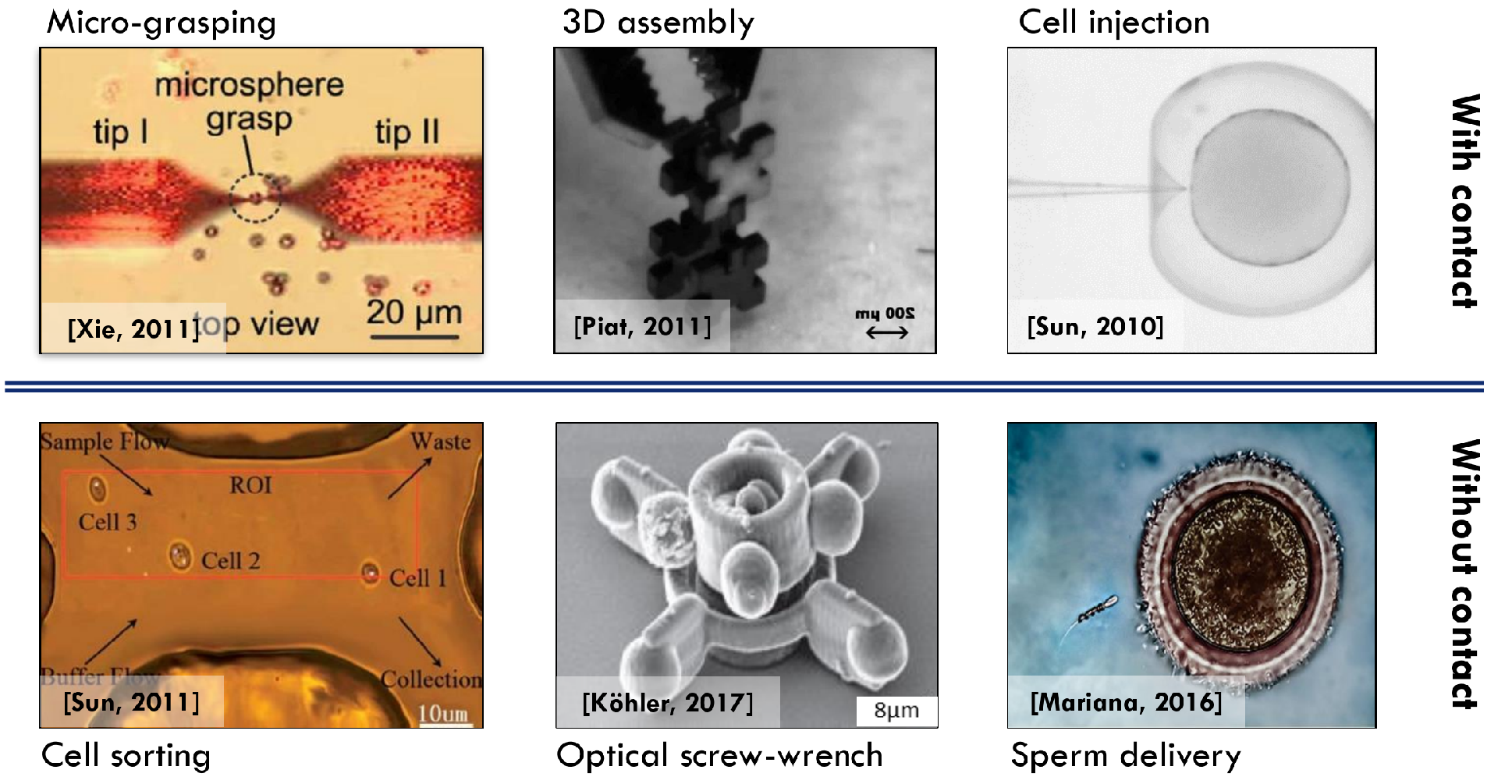
- An interactive instrument for exploration, manipulation and characterization at small scales
- Biomedical applications, microassembly
- Tactile force-feedback user interface
- Transscale coupling and natural interaction
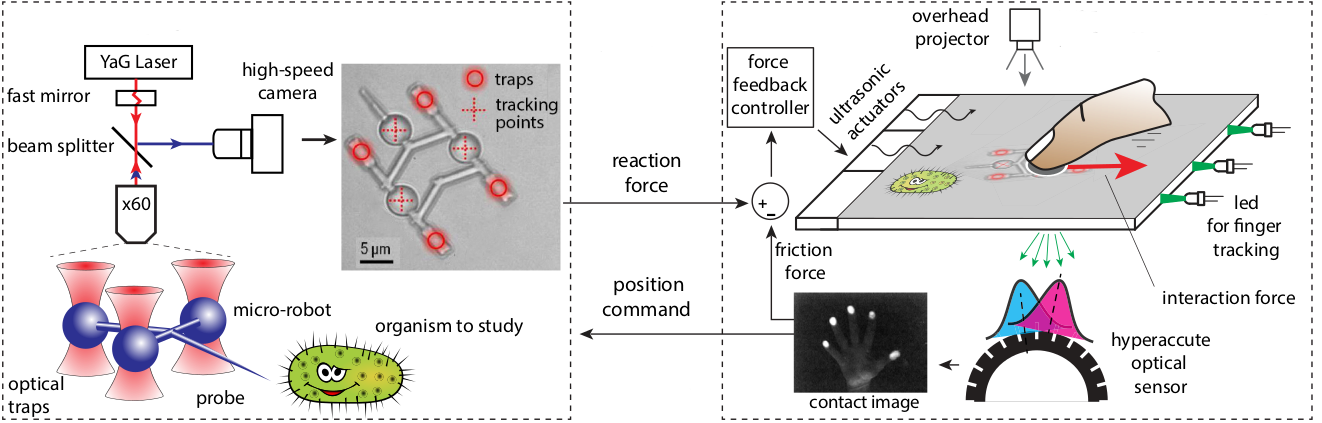
A Brand-NEw Scientific instrument
Optical Tweezers
2018 Nobel prize in Physics were awarded to A. Ashkin for Optical Tweezers. We take it one step further by integrating real-time high-band force feedback, measuring interactions forces in picoNewton range
Surface haptics
Directly modifying the friction of the bare finger sliding on glass using ultrasonic vibrations enables the production of virtual relief, texture and buttons on touchscreens.
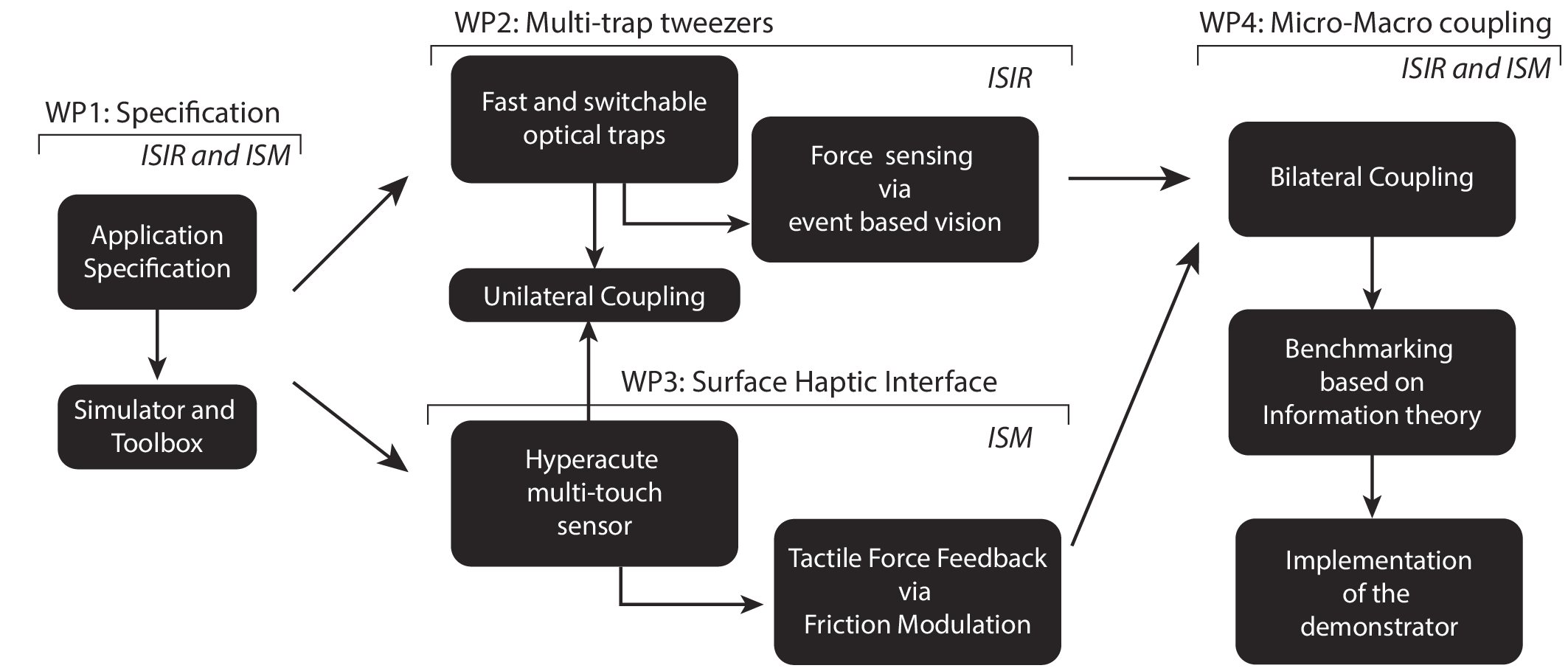
The Technology
Project Organisation
SURFACE HAPTICS

Capabilities
- Modulates fingertip friction digitally
- Continuous and transients features
- High-bandwidth position measurement
Challenges
- Variability of friction force
- Effect of pressing force
Subtitle
Principle

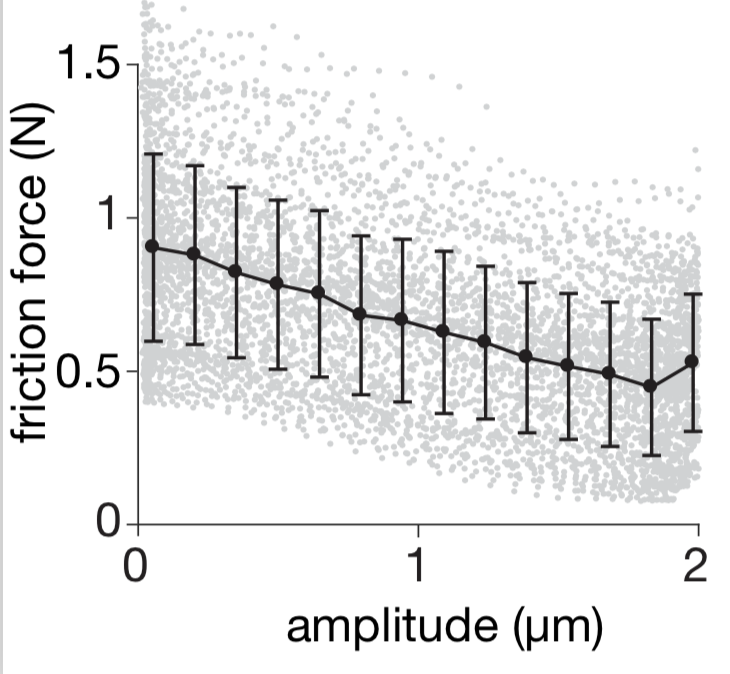
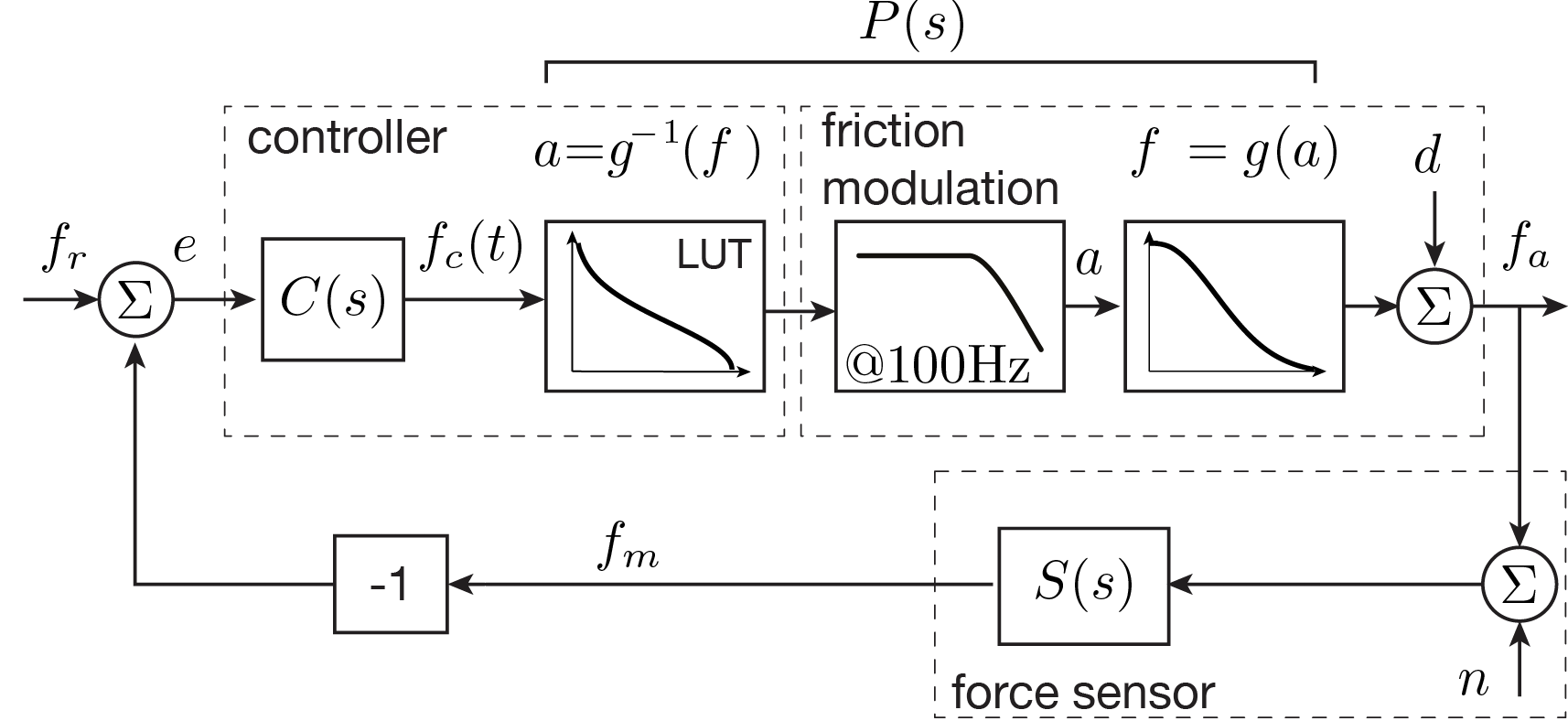
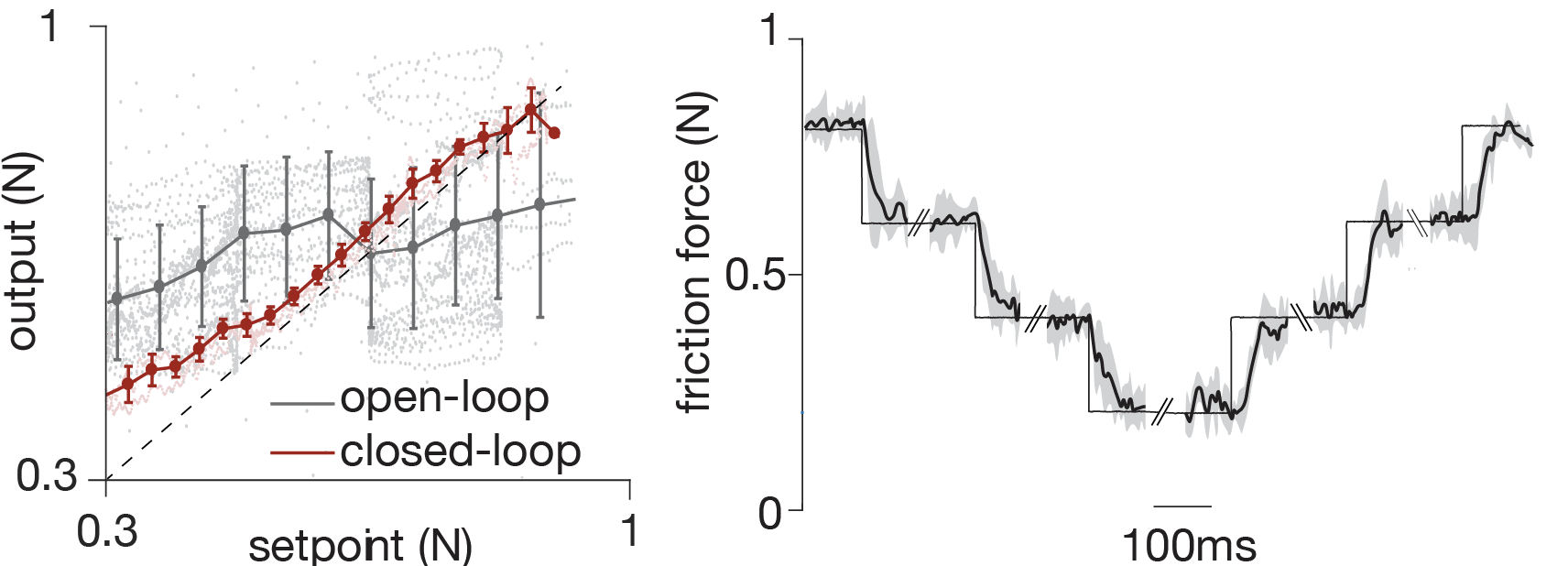
Overcoming variability

High fidelity version
- 1 kHz refresh rate
- 50mN force resolution
- 100µm position resolution
Effect on Incipient Slippage

Optical Tweezers
- A tightly focused laser beam to trap micro objects (1 - 5 µm)
- Non-contact multi object manipulation
- Laser wavelength : 1070nm
- Lase power: 400mW
- 3D force measurement :
- High bandwidth position measurement with an asynchronous camera
- Trap stiffness calibration

3D actuation and measurement

Design of the optical path
Multitrap OPTOBOTS

Microrobots Optiques
Des microrobots produits par impression 3D (nanoscribe)
- Téléopérés en 6D en milieu liquide
- Capture d'efforts d'interaction
- Actionnement sans contact
- Outils terminaux variés
- Biocompatibles
Publications and events
-
Ultrasonic friction modulation modifies the area of contact, not the shear strength, IEEE Eurohaptics 2022, Hambourg, Germany
-
Interactive Laser-actuated micro-robots for Experimental Biology. International Symposium on Optomechatronic Technology (ISOT) 2021 - Best Paper Award
-
Étude de la réflexion et de l'absorption des ondes ultrasonores par le doigt : application aux surfaces haptiques. Thèse de Doctorat de AMU 2021, Nicolas Huloux
-
6-DoF Optical-driven Micro-robots with Force Feedback Capabilities for Interactive Bio-manipulation. Thèse de Doctorat de Sorbonne Université 2020, Edison Gerena, GDR Robotique Prix de la Thèse
-
Tele–Robotic Platform for Dexterous Optical Single-Cell Manipulation. Micromachines, 2019
-
Improving optical micromanipulation with force-feedback bilateral coupling. ICRA 2020, Paris, France
-
Robotic Optical-micromanipulation Platform for Dexterous Remote Single-Cell Manipulation. MARSS 2019 July, Helsinki, Finland
-
High-bandwidth 3D Multi-Trap Actuation Technique for 6-DoF Real-Time Control of Optical Robots, IEEE Robotics and Automation Letters 2019 [DOI]
-
Overcoming fingertip friction variability with surface haptics force-feedback, In proc. of Eurohaptics 2018, Pisa, Italy. Best Student Paper award [DOI]
-
Perception of ultrasonic switches involves large discontinuity of the mechanical impedance, IEEE Transactions on Haptics [DOI]
-
High-bandwidth 3D Force Feedback Optical Tweezers for Interactive Bio-manipulation. 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Vancouver, Canada. Best Student Paper nominee [DOI]
Public presentations
-
Salon Forum Labo 2017, Paris
-
Salon ELRIG 2017, Monaco
-
Demonstration Worldhaptics 2017
-
Demonstration Eurohaptics 2018

Valorisation
Etude du marché (SATT Lutech)
Recherche de Partenaires Biomédicale/pharmacologie:
Instituts Pasteur, de Vision, de Cerveau et de la moelle épinière
Transfert Industriel:
Création Stratup,
Programme CNRS RISE, i-Phd Bpifrance
DIM-Elicit: « Technologies Innovantes
pour les Sciences de la Vie »
Enseignement:
Cours de M2 commun AMU / UPMC
ETAT d'AVANCEMENT
WP1
-
API de communication en place
- Définition de l'application finale
WP2
-
Pinces optiques 3D avec mesure de force, OptoBots
-
Simulateur multitrap, avec couplage et retour de force
-
Implémentation de l'API pour le couplage bilatérale (commande en position/vitesse multi pièges, couplage entre les pièges, retour de mesure d'effort)
-
Validé sur interfaces haptiques classique
WP3
- Validation du retour de force sur les doigts
- Capteurs de position des doigts très haute vitesse et très haute précision
- Banc experimental pour l'etude de l'effet des ultrasons sur le décollement du doigt
travaux en cours
WP2
-
Mesure de force 3ddl sur un robot
-
Mesure de force multipièges synchronisées
WP3
- Fabrication et test des surfaces haptiques
- Mesures sur le banc experimental
- Etude psychophysique de la perception de la viscosité
WP4
- Couplage bilateral à friction
- Benchmarking
Dissemination
LIVRables
| D1.1 | Specifications | M3 | M6 |
| D1.2 | Simulateur | M6 | M6 |
| D2.2 | Multi-ddl motion control | M24 | M12 |
| D2.3 | External Control | M24 | M36 |
| D3.3 | Interface tactile | M27 | M12 |
A VENIR
| D1.2 | API Interface utilisateur | M6 | M36 |
| D2.1 | Mesure de force multitrap | M12 | M36 |
| D3.1 | Capteur hyper-acuité | M12 | M30 |
| D3.2 | Capteur multi-touch | M24 | M30 |
| D4.1 | Schéma de commande bilatérale | M30 | M36 |
| D4.2 | Evaluation utilisateurs | M36 | M36 |
| D4.3 | Demonstrateur complet | M36 | M48 |
Jalons validés
| M1.1 | Validation du simulateur | M6 |
| M2.1 | Beam Switcher | M12 |
| M3.1 | Validation capteur | M12 |
| M3.2 | Mesure de force sous le doigt | M18 |
| M3.3 | Validation de réduction de friction | M20 |
| M2.2 | Asynchronious vision | M30 |
| M2.3 | Synchro beam switch + vision | M30 |
| M4.1 | OT avec retour haptique | M33 |
| M4.2 | Protocole expé validé | M33 |