Kunita flows, shape stochastics, and phylogenetic inference
Stefan Sommer, University of Copenhagen

Faculty of Science, University of Copenhagen
Chalmers University, May, 2025
Shape stochastics, conditional processes and inference
w/ Frank v.d. Meulen, Rasmus Nielsen, Christy Hipsley, Sofia Stoustrup, Libby Baker, Gefan Yang, Michael Severinsen
Villum foundation
Novo nordisk foundation
University of Copenhagen
Center for Computational Evolutionary Morphometrics
w/ Rasmus Nielsen
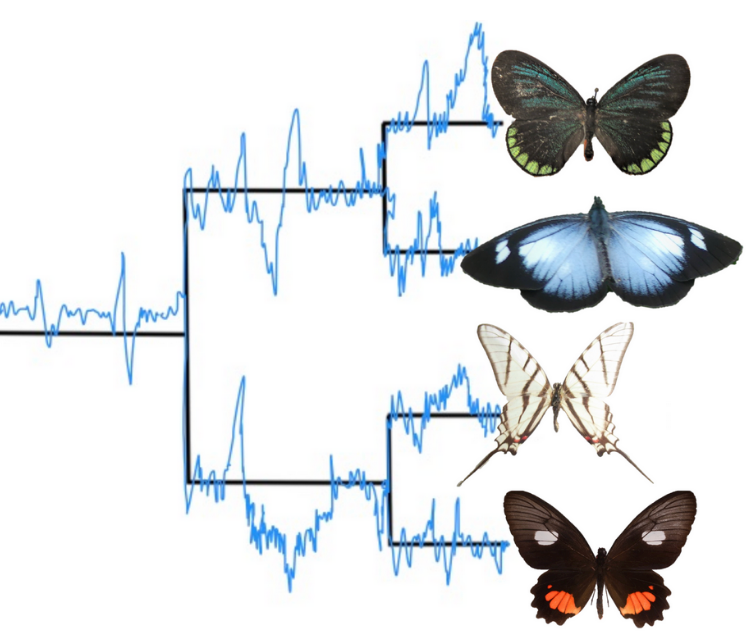
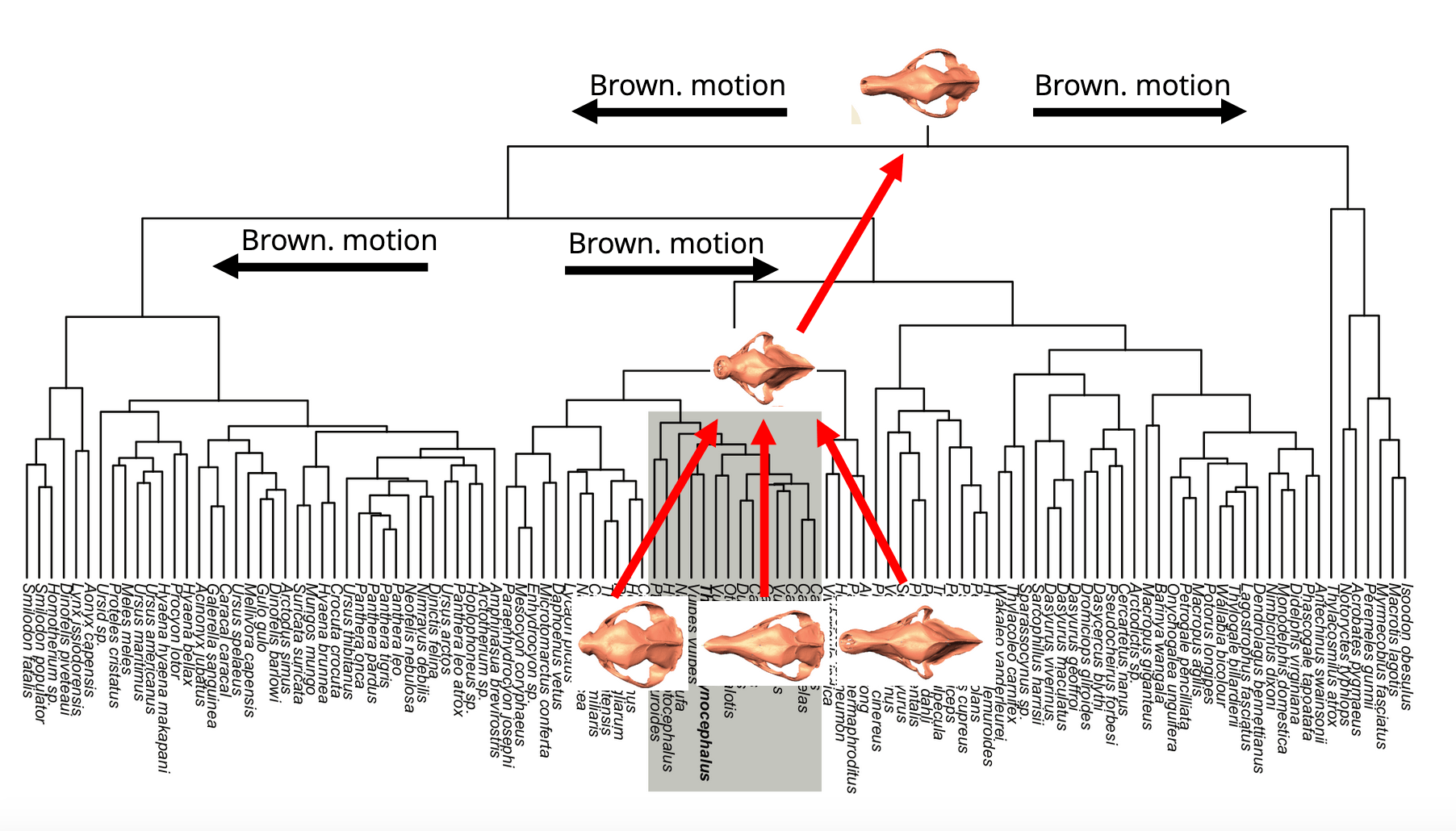
Brownian motion model of trait evolution
Brown. motion
Brown. motion
Brown. motion
Brown. motion
branch (independent children)
incorporate leaf observations \(x_{V_T}\) into probabilistic model:
\(p(X_t|x_{V_T})\)
Felsenstein's pruning algorithm for shapes
Brown. motion
Brown. motion
Brown. motion
Brown. motion
1) What is a shape Brownian motion?
2) How do we condition the nonlinear process on shape observations?
3) How do we perform inference in the full model?
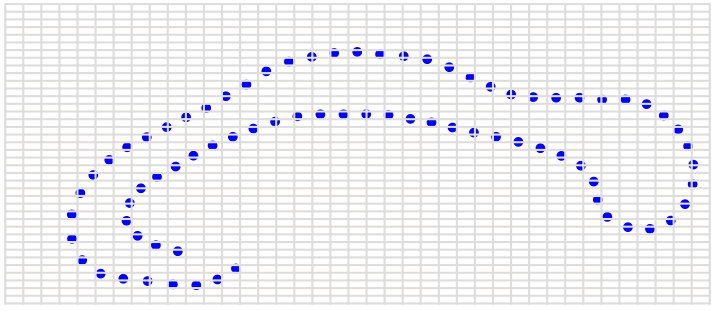
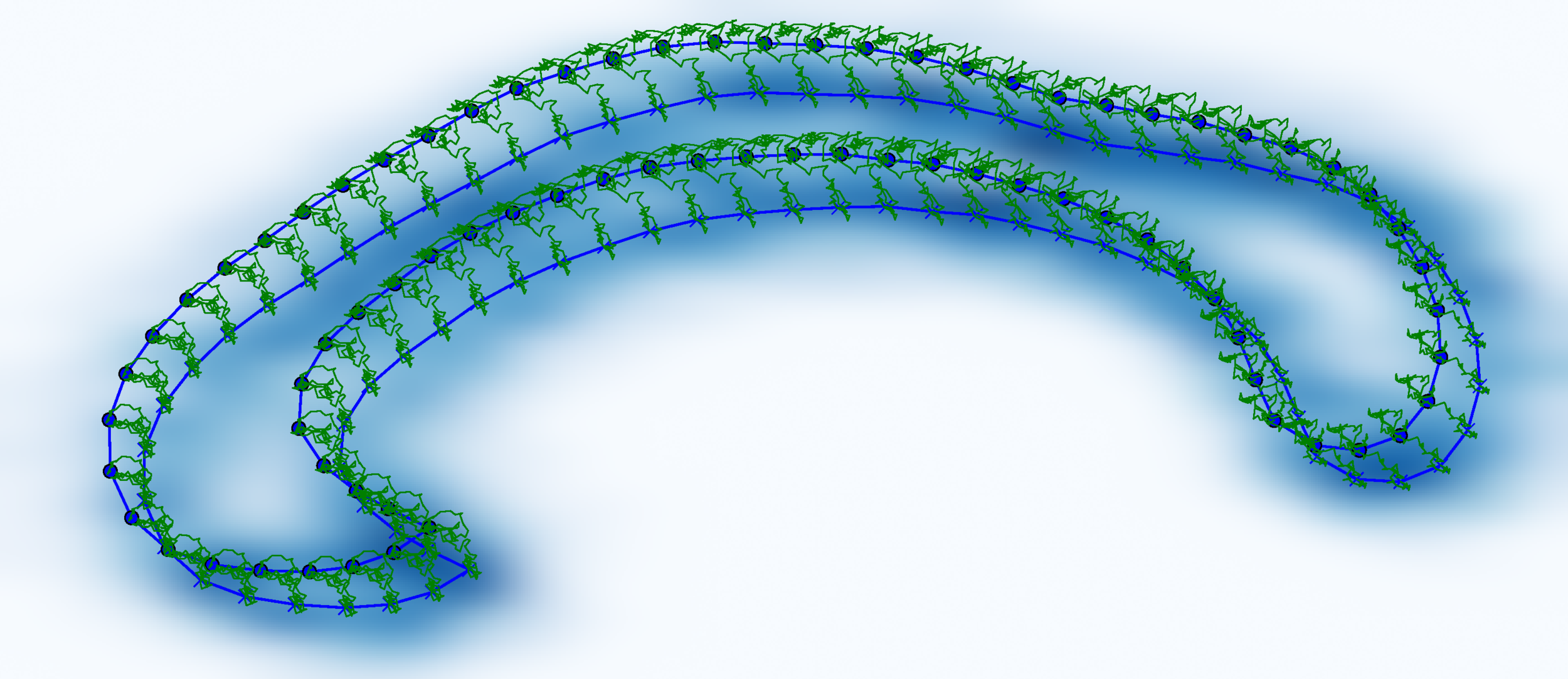
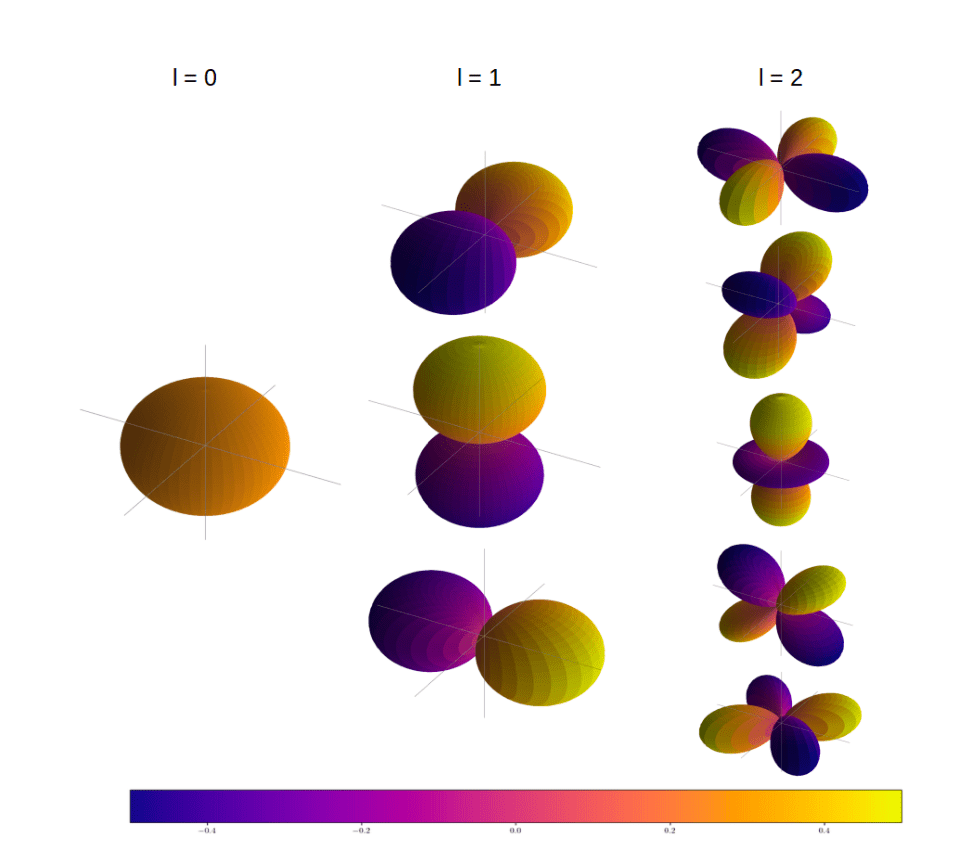
Stochastics of shapes
Stochastic processes that
- apply to landmarks, curves, surfaces and images
- are independent of discretization
- preserve shape structure
- model correlation between points
- are nonlinear
- are invariant to acting groups

shape \(s_0\)
shape \(s_1\)
stoch. evolution \(s_0\rightarrow s_1\)
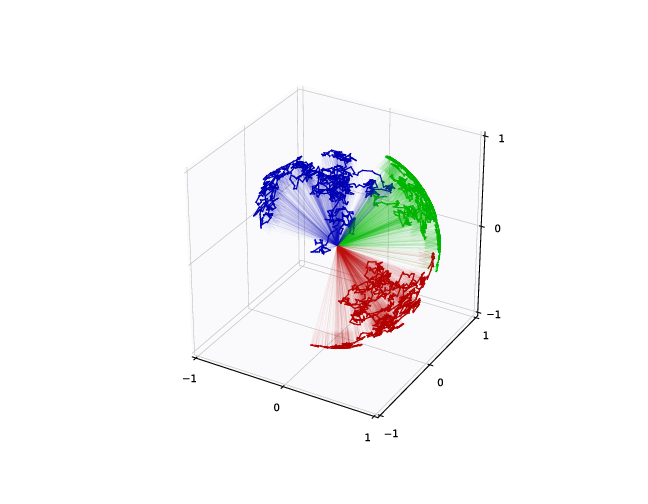
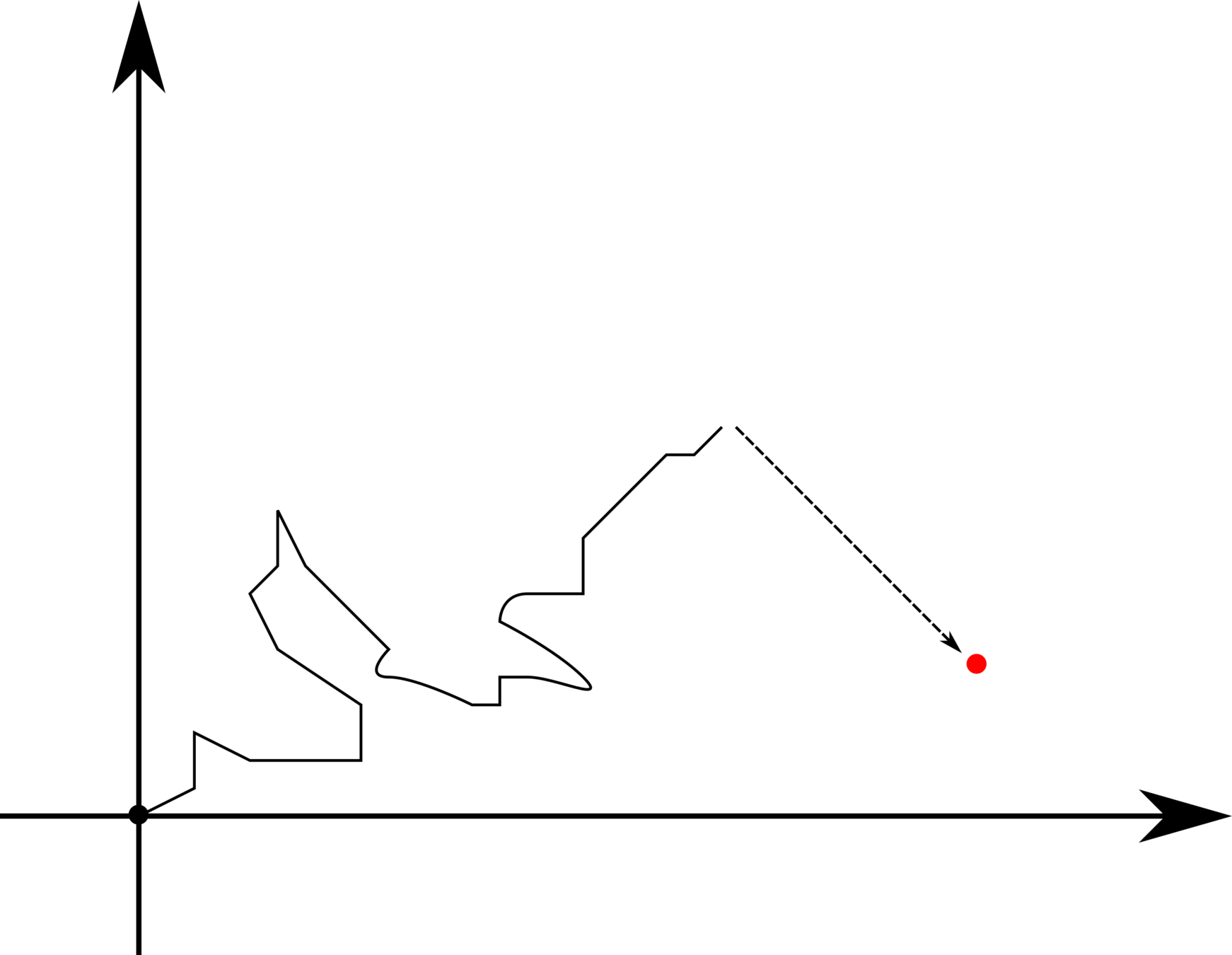
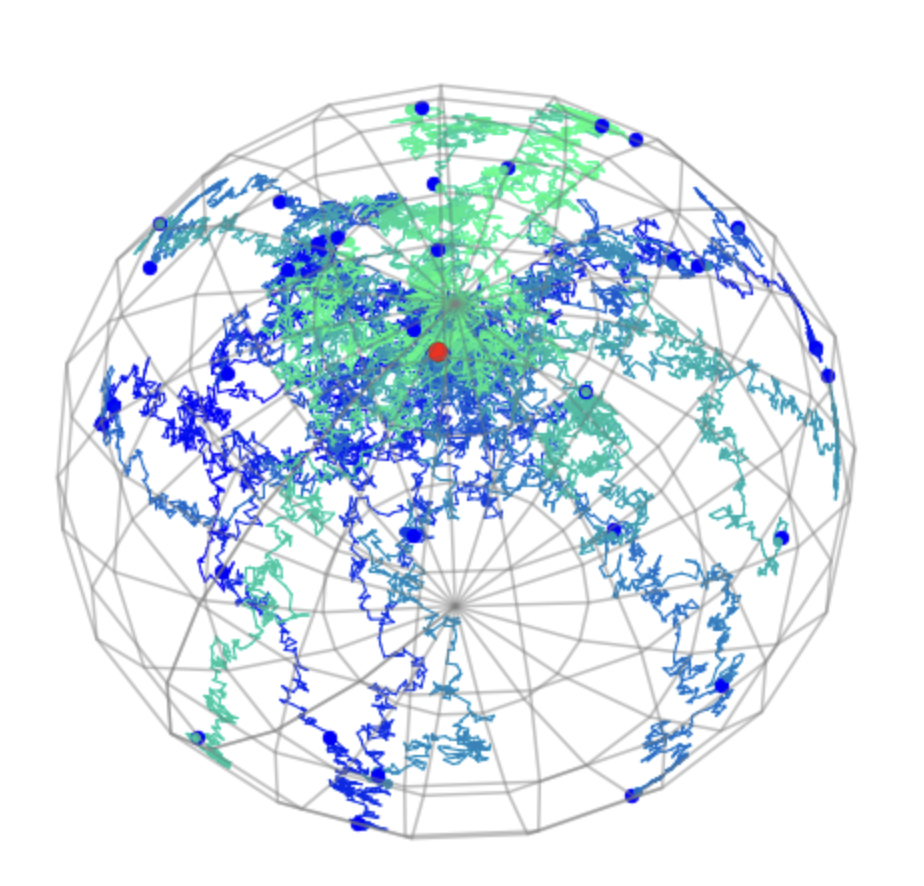
Riemannian Brownian motion:
Stochastics of shapes
Shapes, deformations and nonlinearity
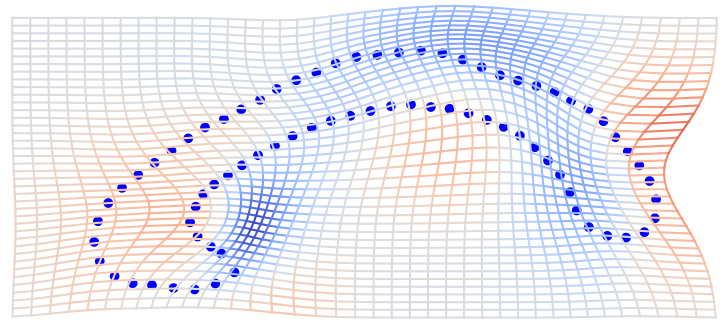
action: \(\phi.s=\phi\circ s\) (shapes)
\(\phi.s=s\circ\phi^{-1}\) (images)
\( \phi \)
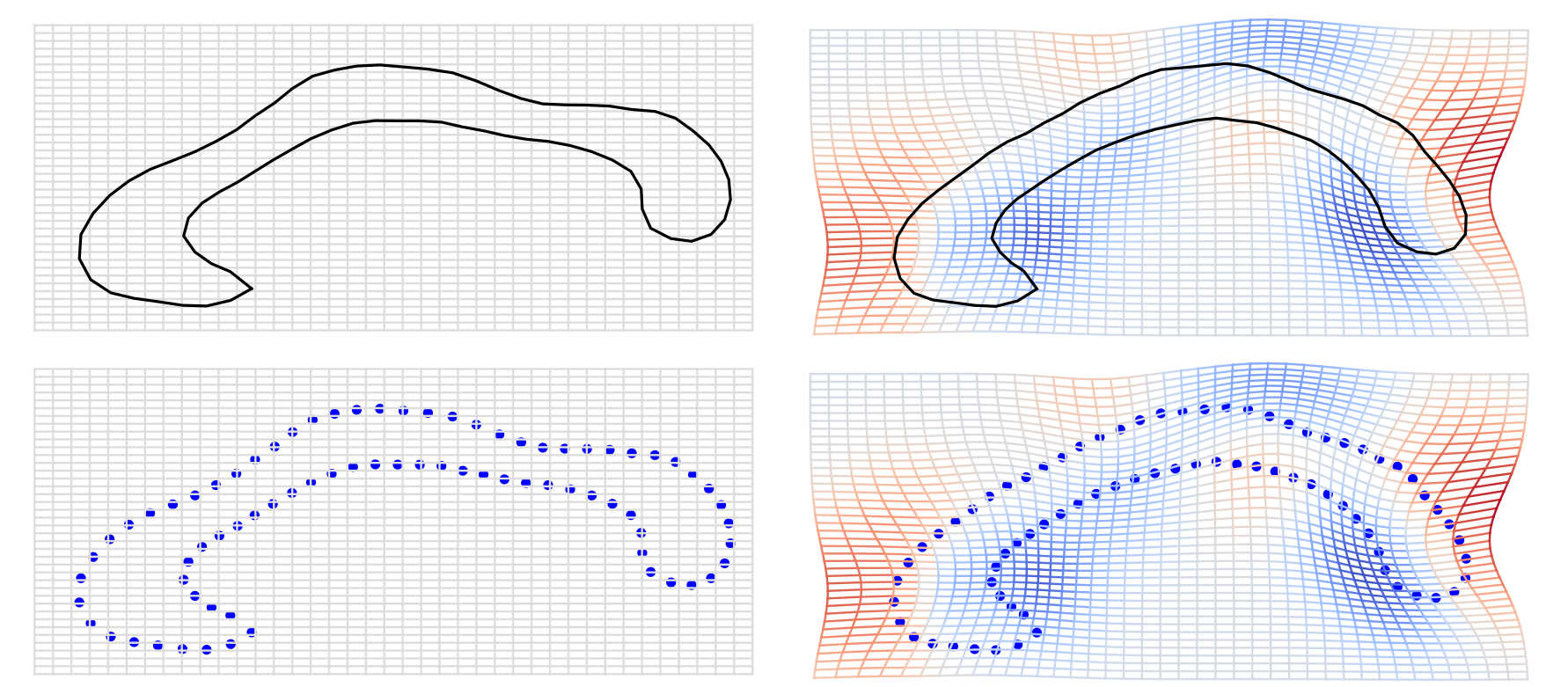
\( \phi \) warp of domain \(\Omega\) (2D or 3D space)
landmarks: \(s=(x_1,\ldots,x_n)\)
curves: \(s: \mathbb S^1\to\mathbb R^2\)
surfaces: \(s: \mathbb S^2\to\mathbb R^3\)
Geometric + metric view
\( \phi_t:[0,T]\to\mathrm{Diff}(\Omega) \) path of diffeomorphisms (parameter t)
LDDMM: Grenander, Miller, Trouve, Younes, Christensen, Joshi, et al.
Evolution with noise
Markussen,CVIU'07; Budhiraja,Dupuis,Maroulas,Bernoulli'10
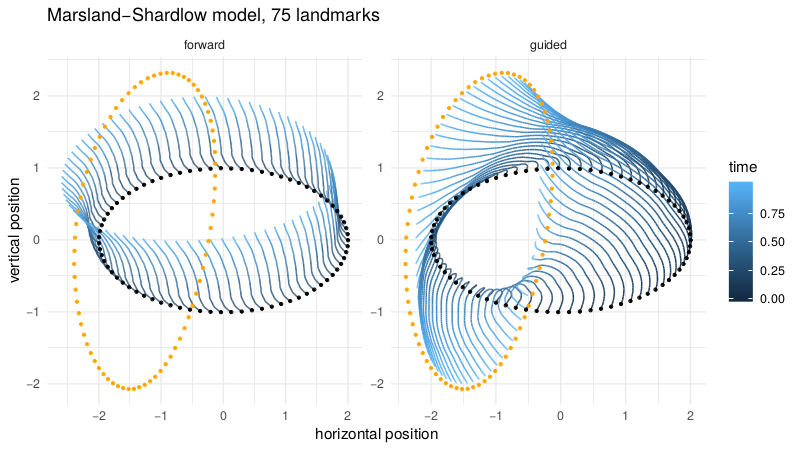
Trouve,Vialard,QAM'12;Vialard,SPA'13;Marsland/Shardlow,SIIMS'17
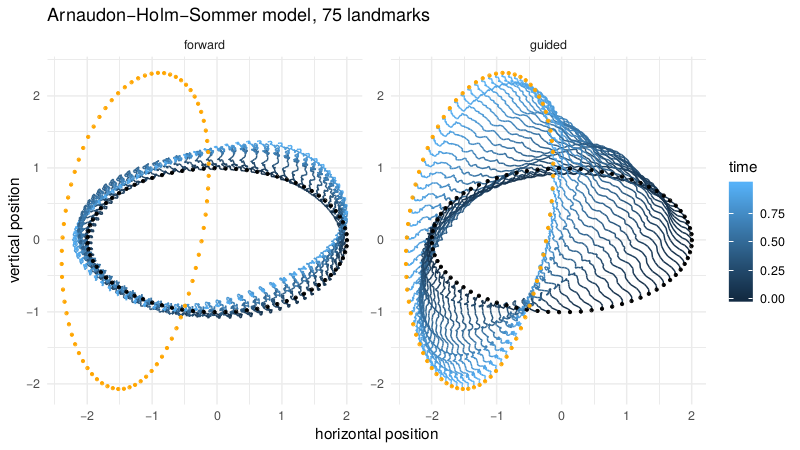
Arnaudon,Holm,Sommer,IPMI'17; FoCM'18; JMIV'19
Arnaudon,v.d. Meulen,Schauer,Sommer'21
geodesic ODE
perturbed SDE
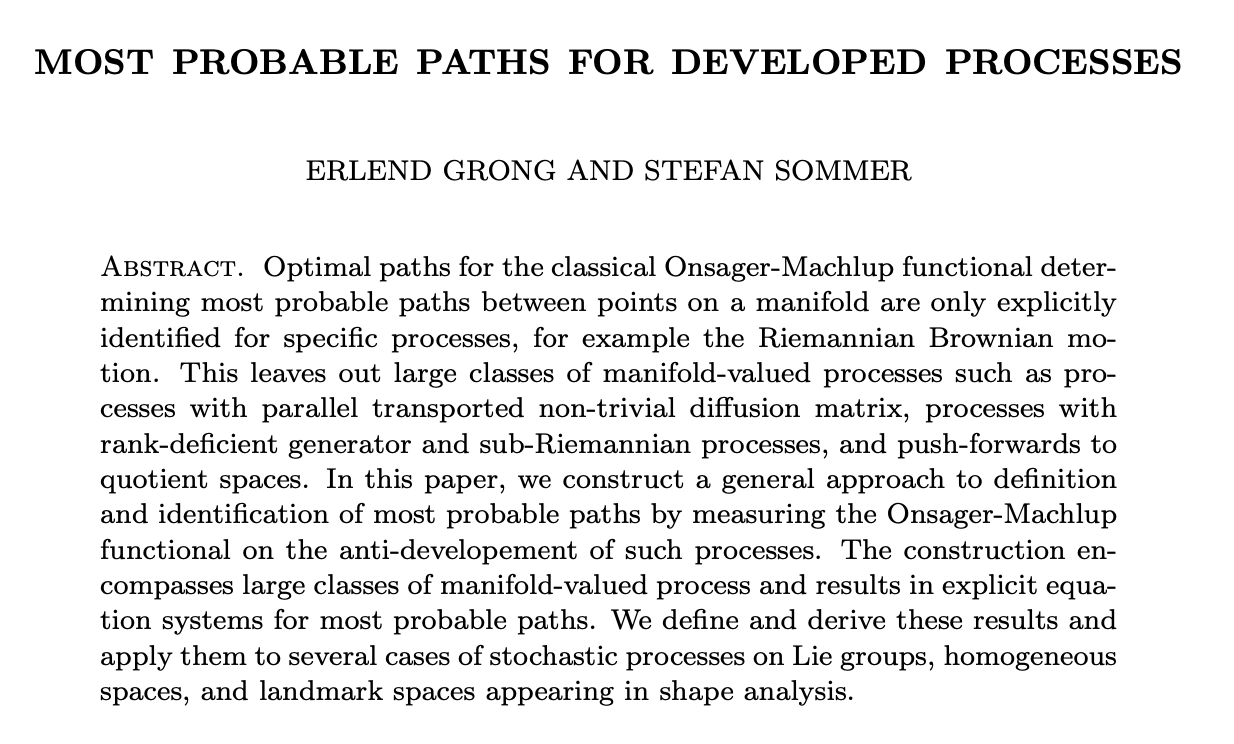
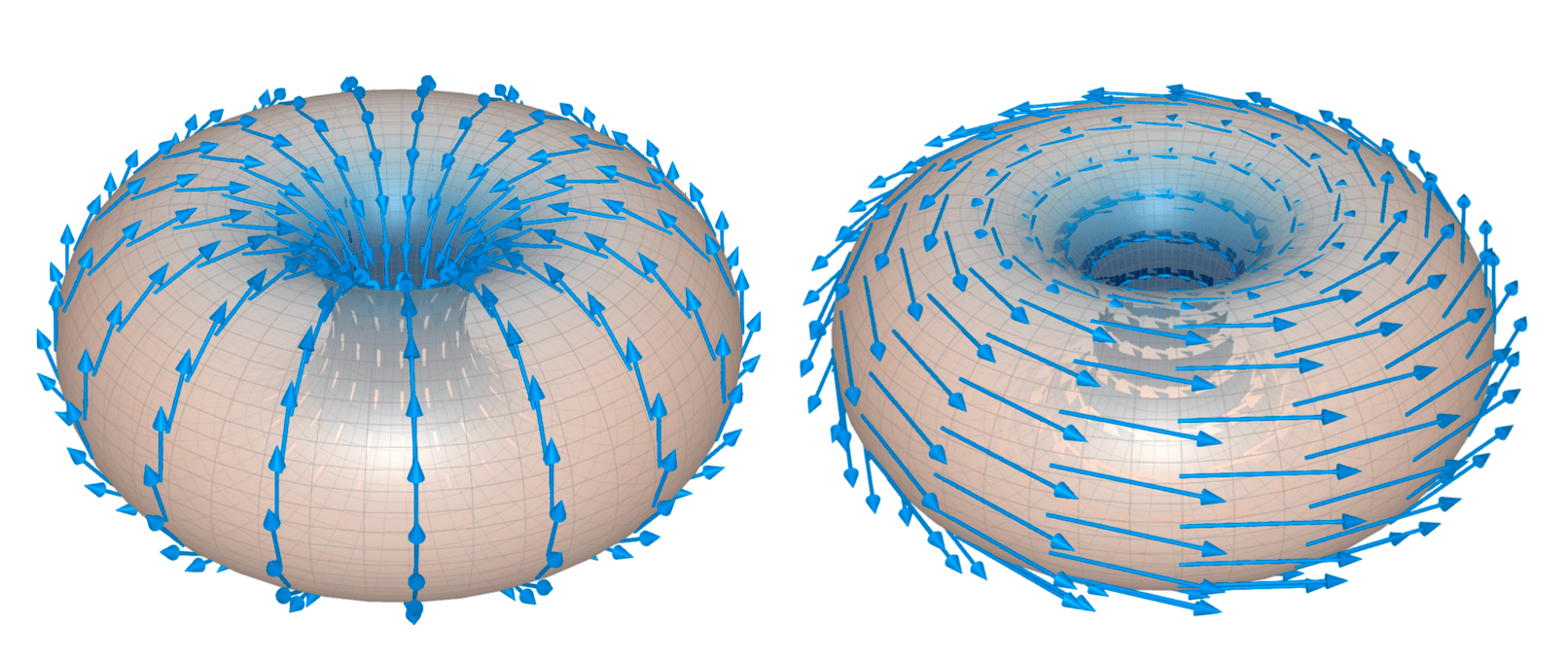
Eulerian shape process / Kunita flow
Shape process:
\[dX_t=K(X_t)\circ dW_t\]
Kernel matrix:
\[K(X_t)^i_j=k(x_i,x_j)\]
Infinite noise:
\[dX_t = Q^{1/2}(X_t) \circ dW_t\]
\(Q^{1/2}(X_t)v(x) =\\\qquad \int_{D} k^{Q^{1/2}}(X_t(x)+x,y) v(y) \, dy\)
\(X_t\) landmarks at time \(t\):
\[X_t=\begin{pmatrix}x_{1,t}\\y_{1,t}\\\vdots\\x_{n,t}\\y_{n,t}\end{pmatrix}\]
\(t=\frac12\)
\(t=3\)
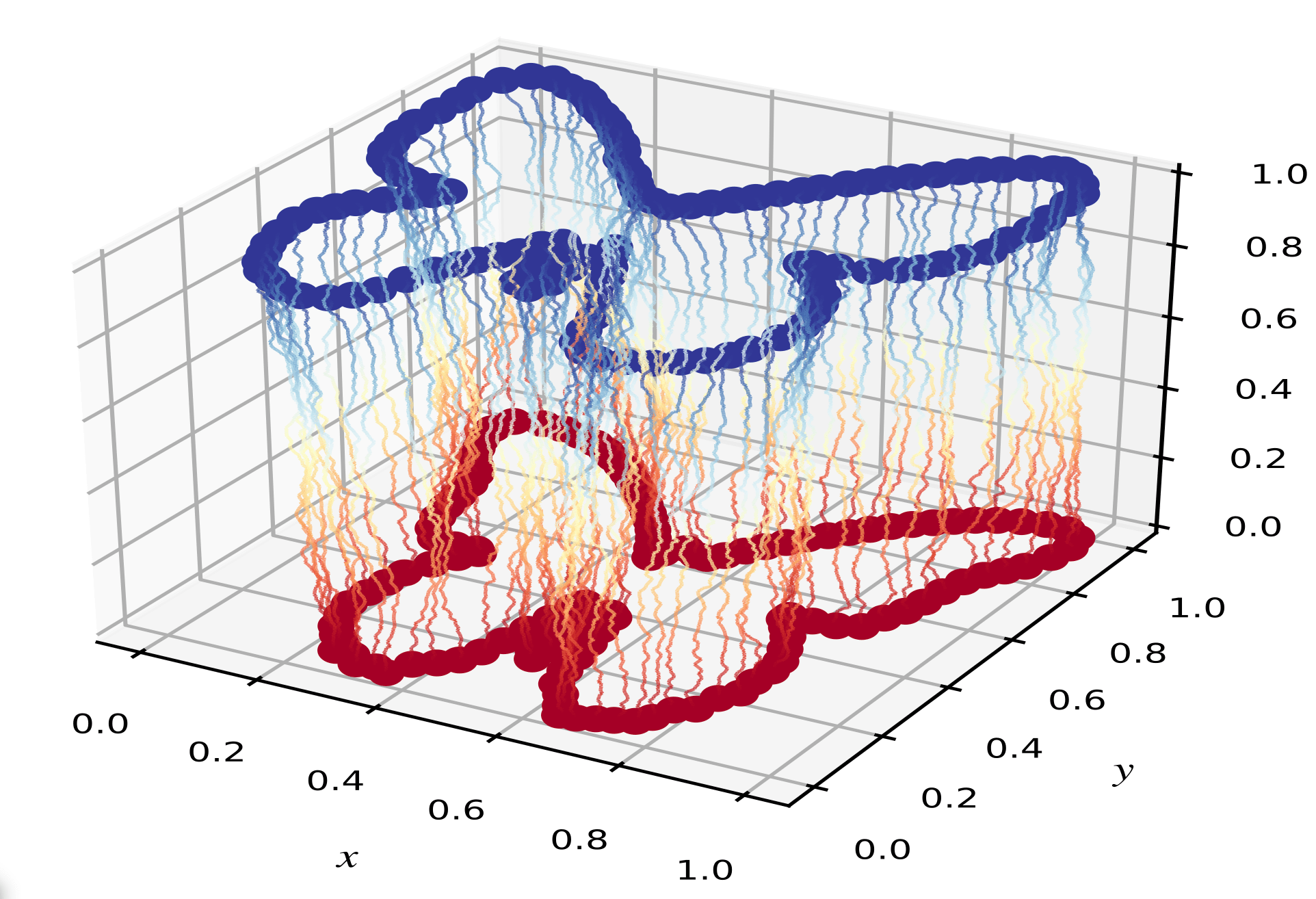
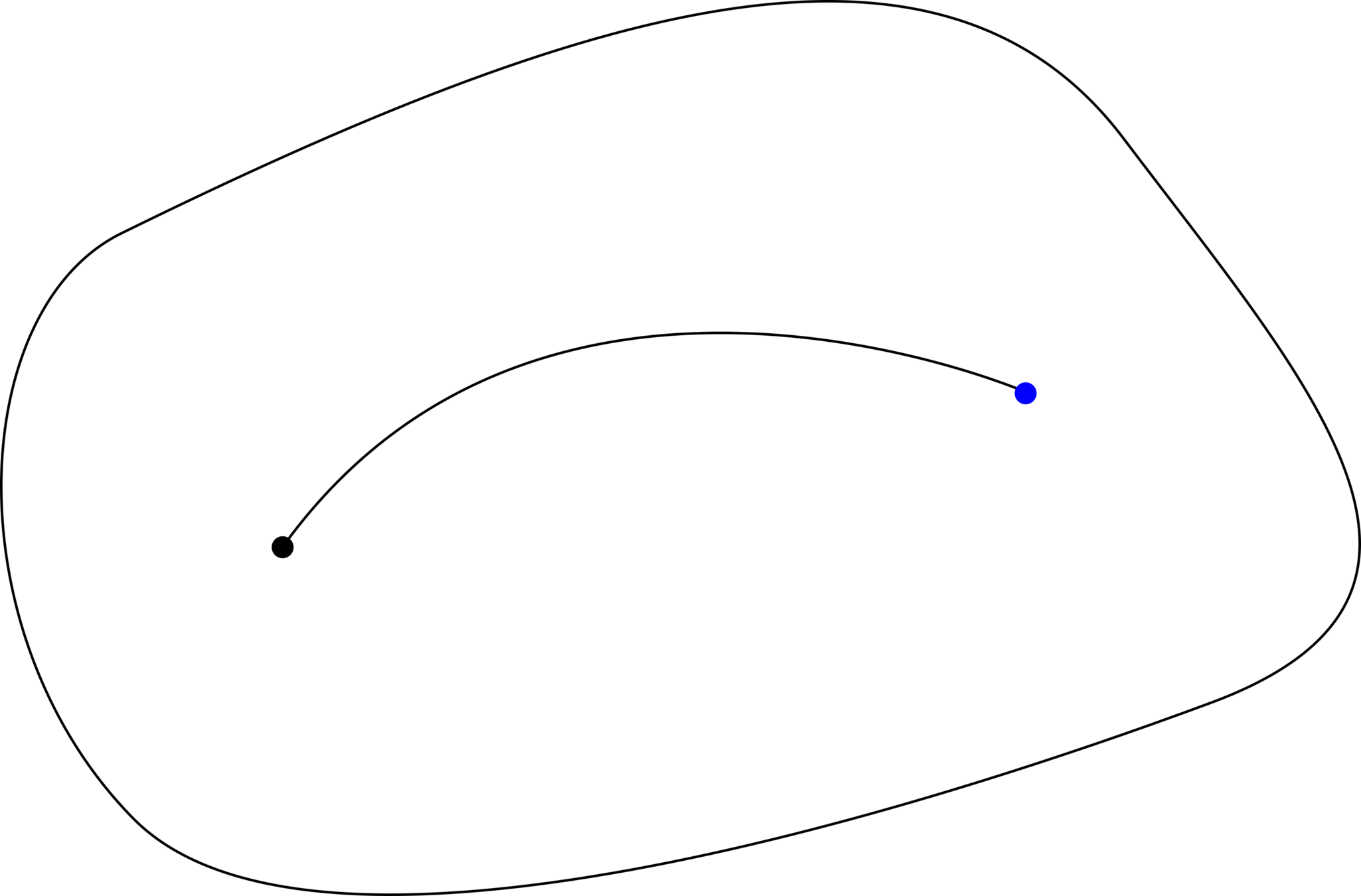
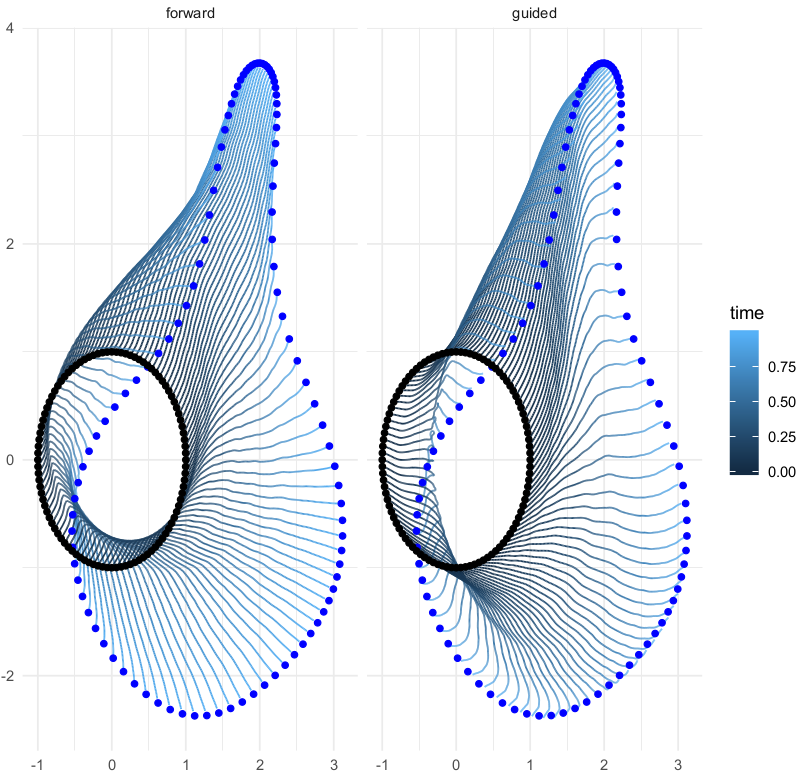
Inference: Data conditional processes
- \(X_t\) generates distribution \(p(\cdot|X_0)\)
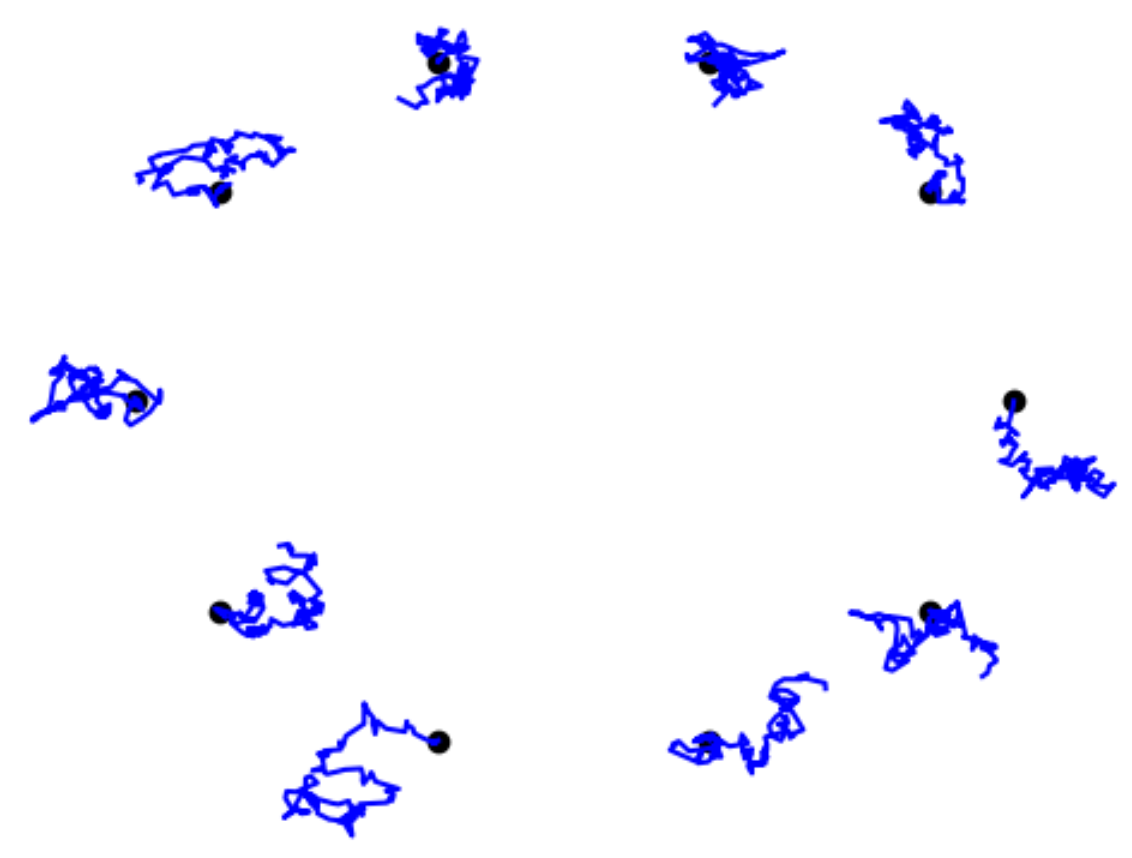
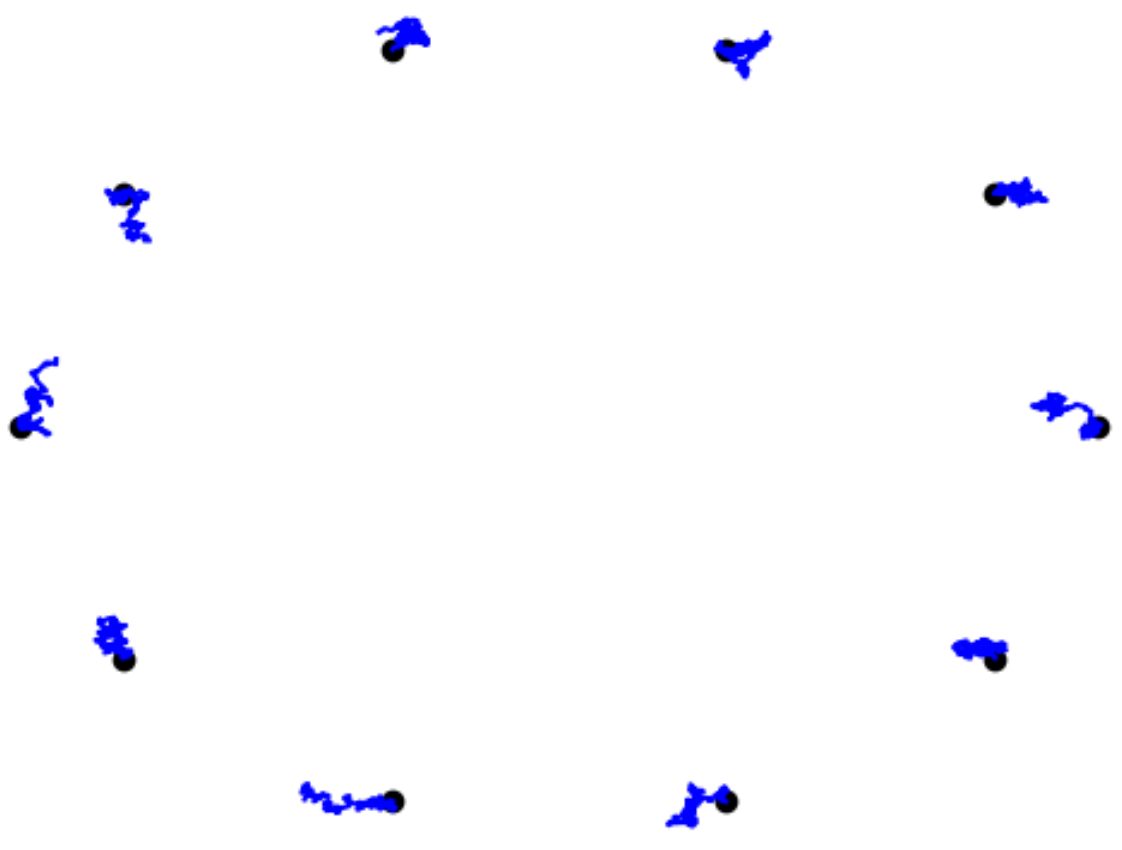
- given observed shape \(v\), we wish for \(T>0\) to generate \(X_t|X_T=v\) - a bridge
\(X_t\) (no conditioning)
\(X_t|X_T=v\) (conditioned)
Guided bridges
Delyon/Hu 2006:
\(\sigma\) invertible:
- guided bridge proposal$$dy_t = b(t,y_t)dt - \frac{y_t-v}{T-t}dt + \sigma(t,y_t)dW_t$$
- \(y_T=v\) a.s.
- \(x_t|x_T=v\) absolute continuous wrt. \(y_t\)
- \(\mathbb E_{x_t|x_T=v}[f(x_t)]\propto \mathbb E_{y_t}[f(y_t)\varphi(y_t)]\)
\(v\)
\(x_0\)
\(x_t\)
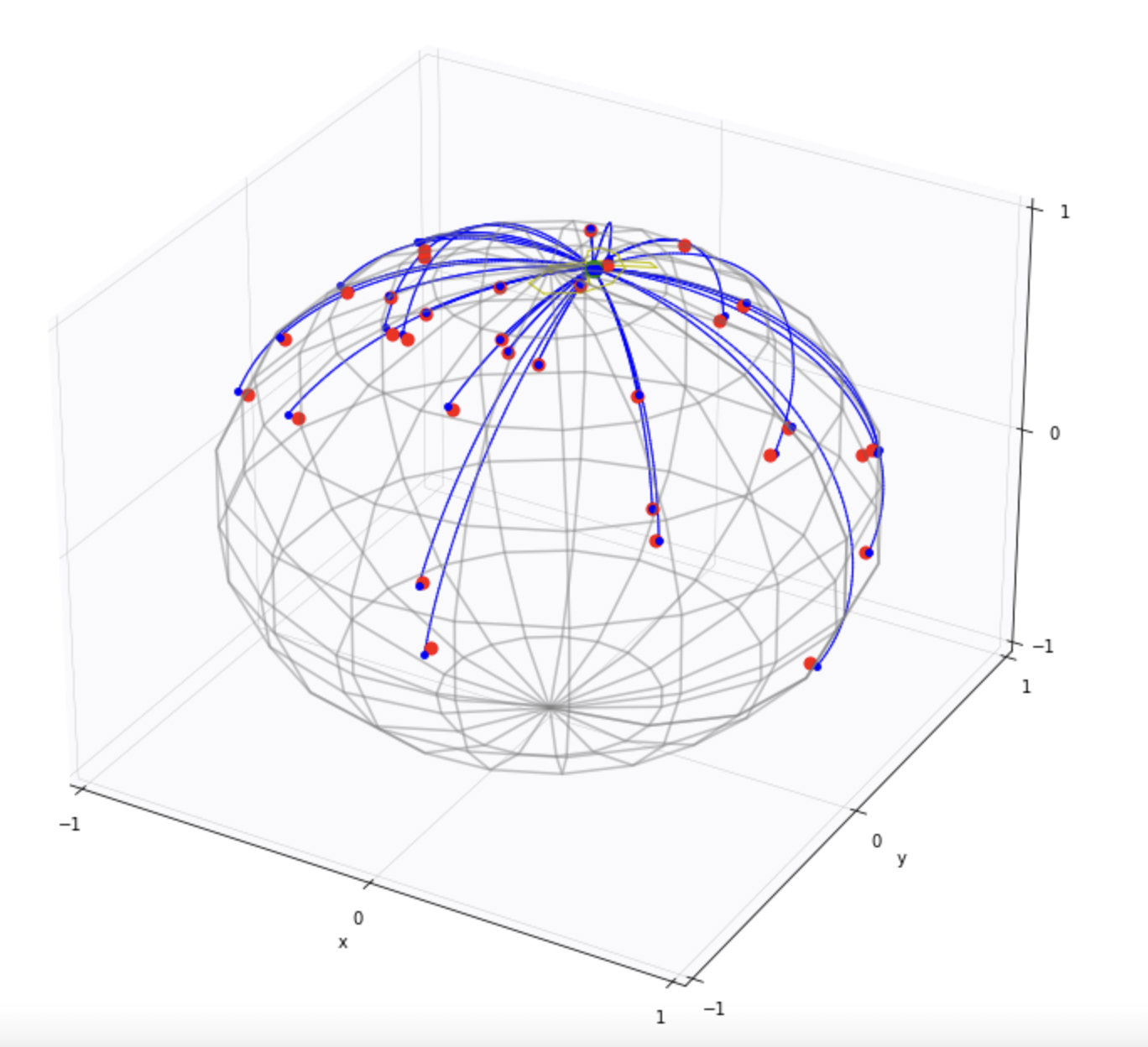
Guided bridges on manifolds
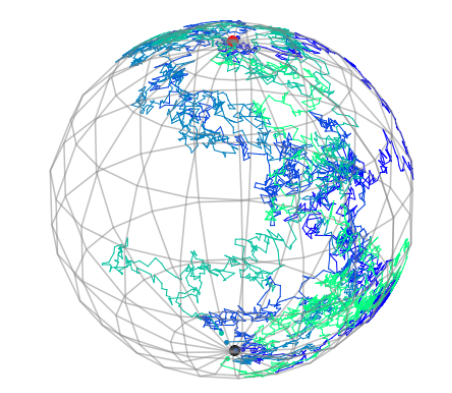
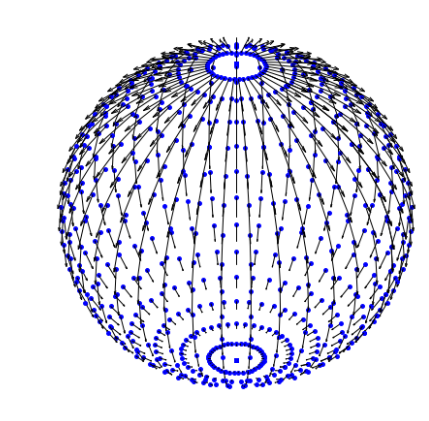
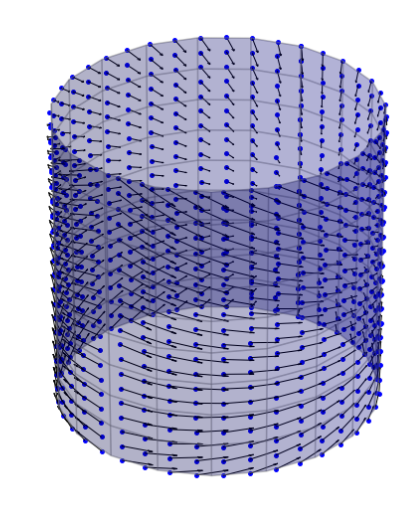
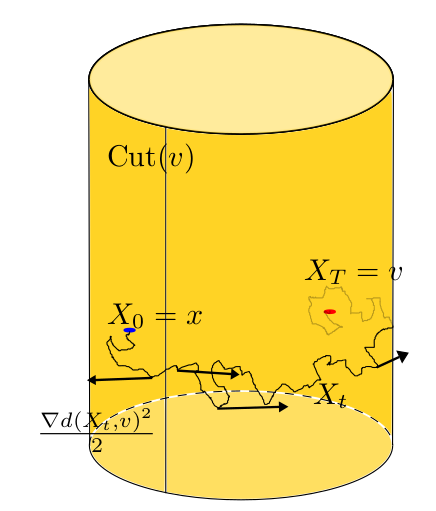
Jensen, Sommer 2021, 2022
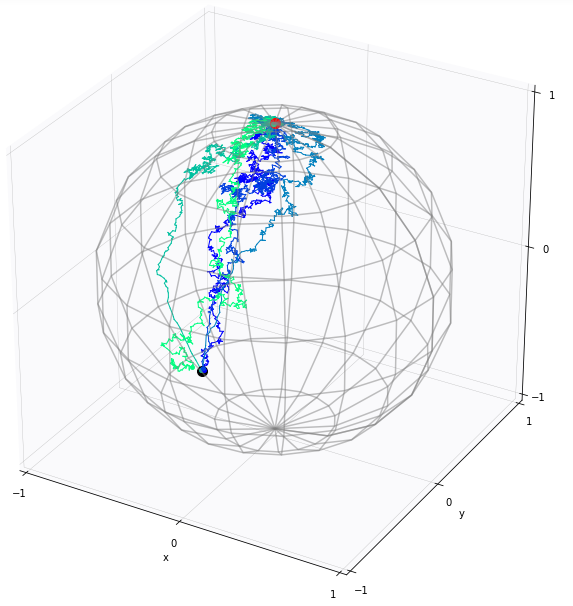
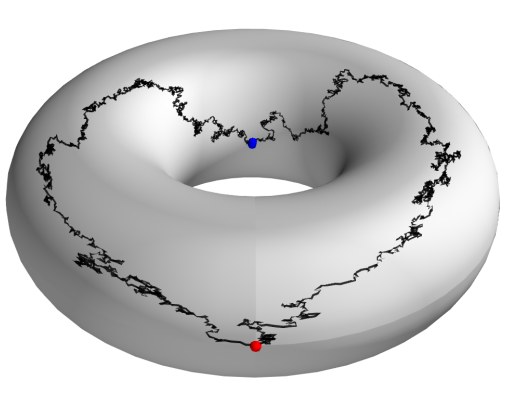
Guided bridges on manifolds
Heat kernel approximations

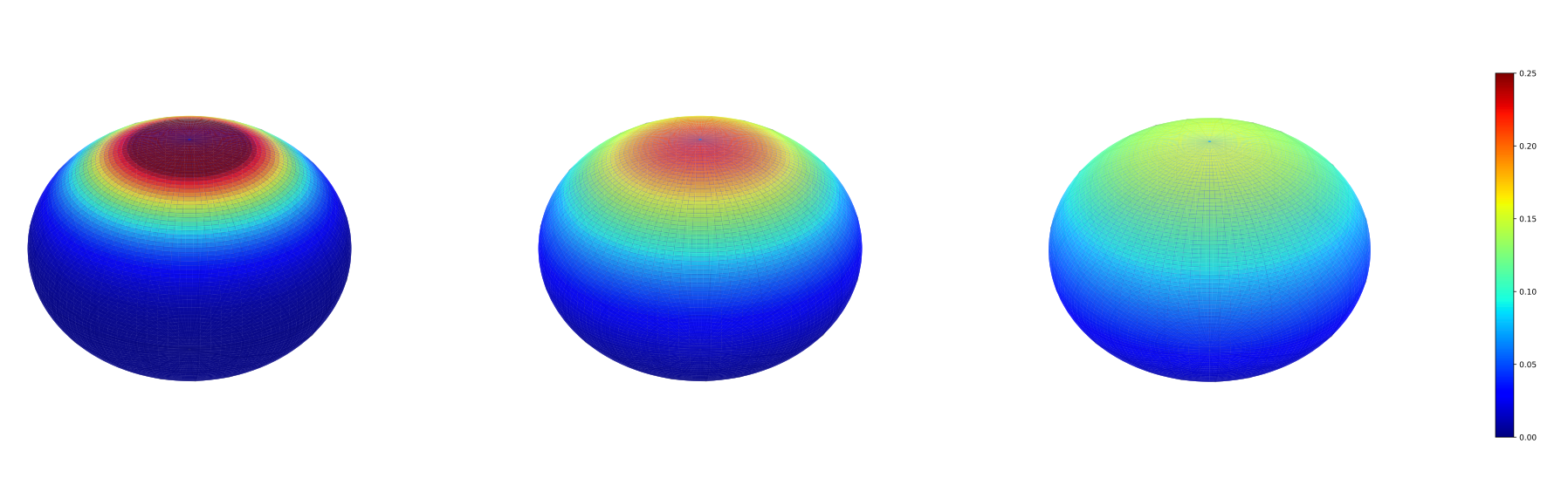
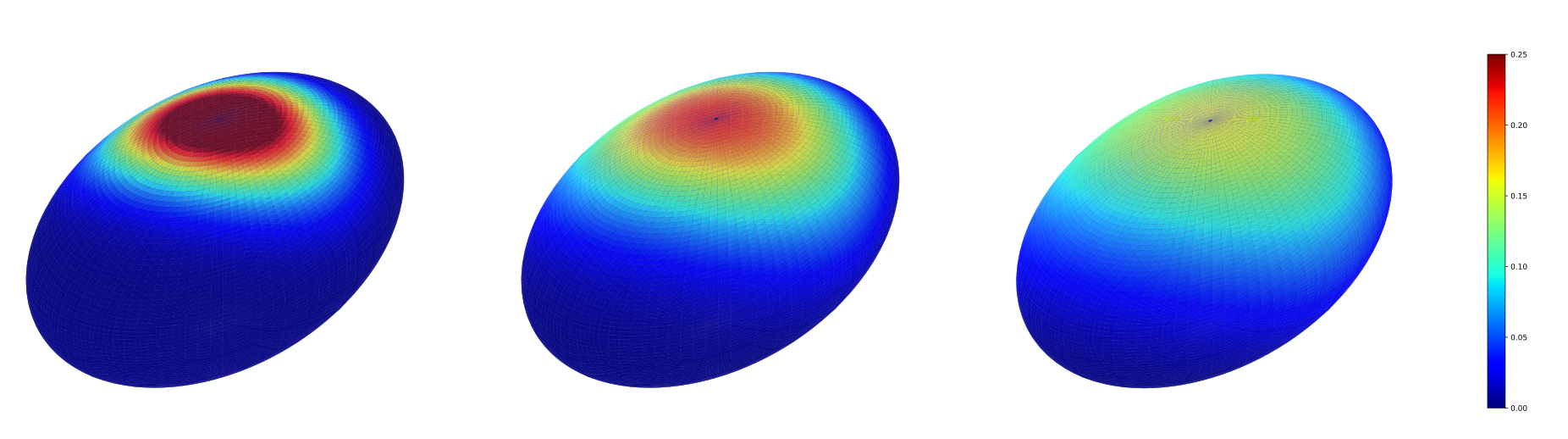
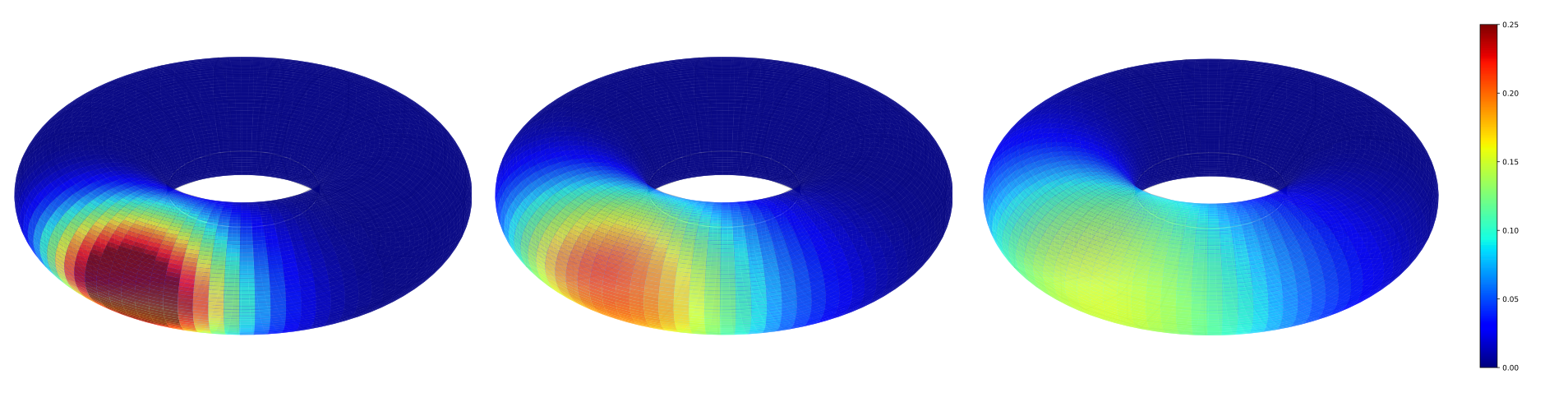
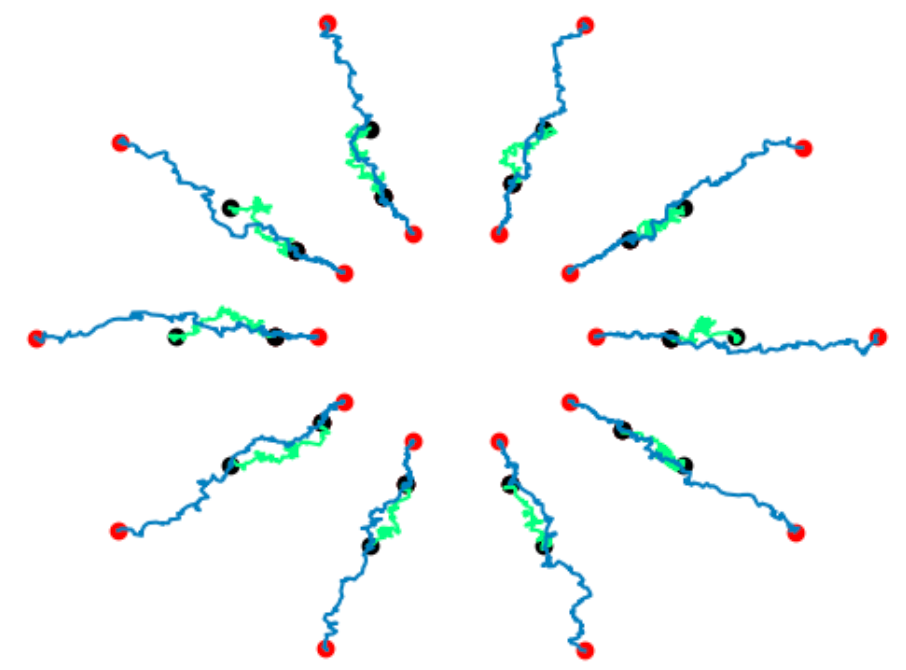
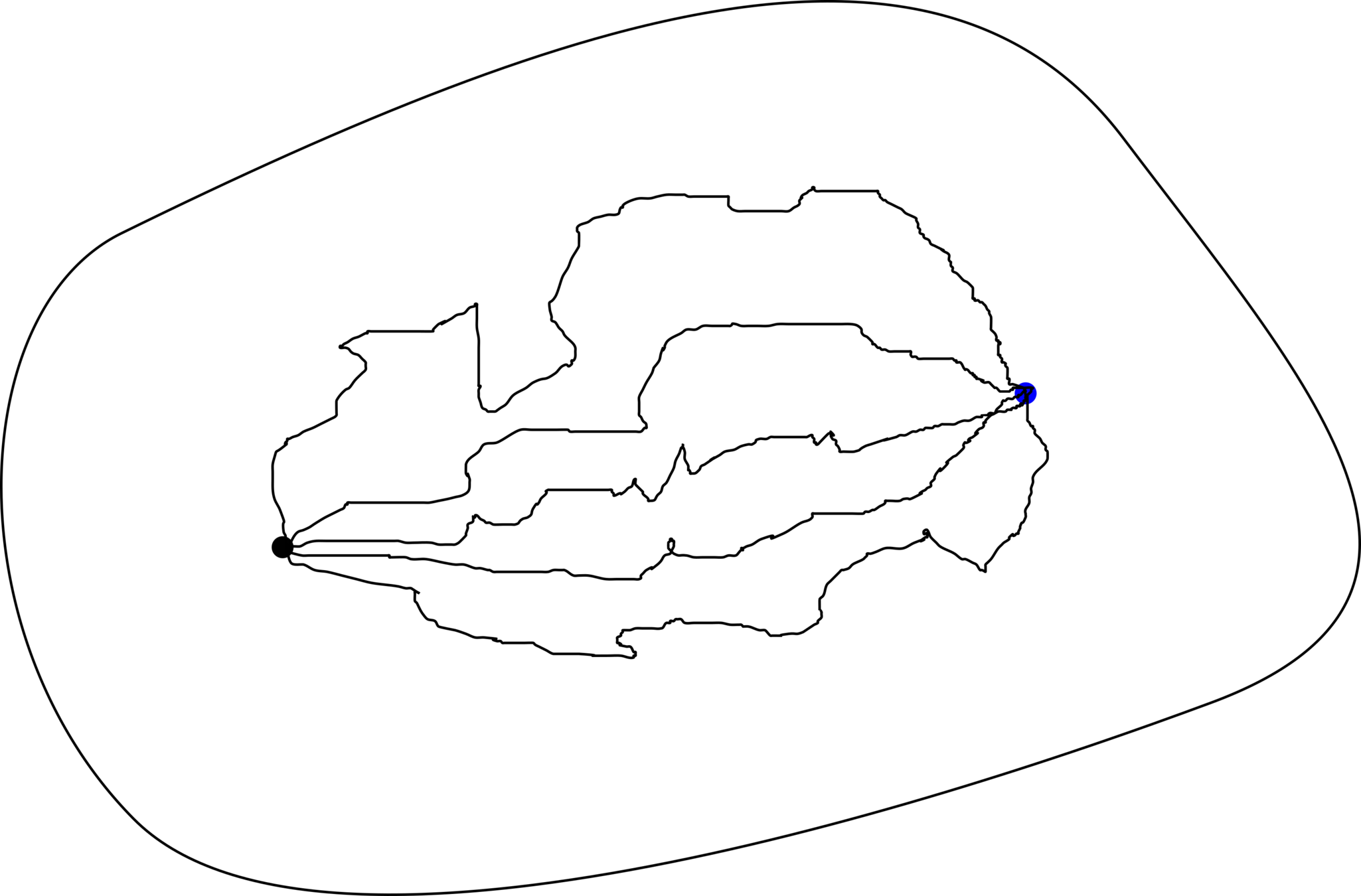
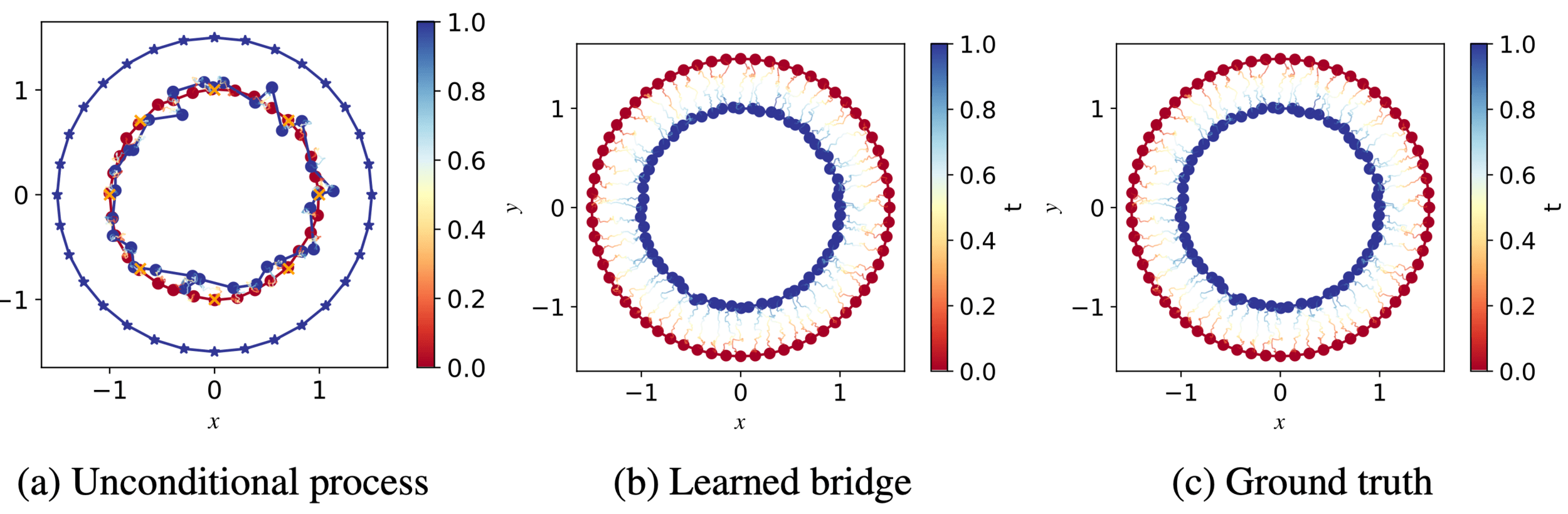
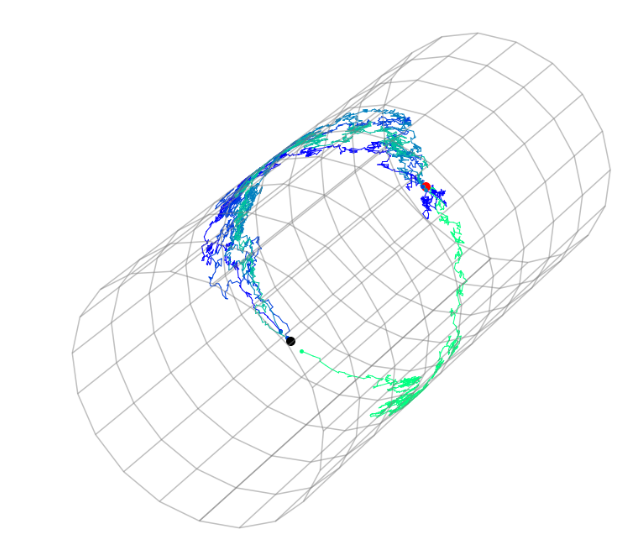
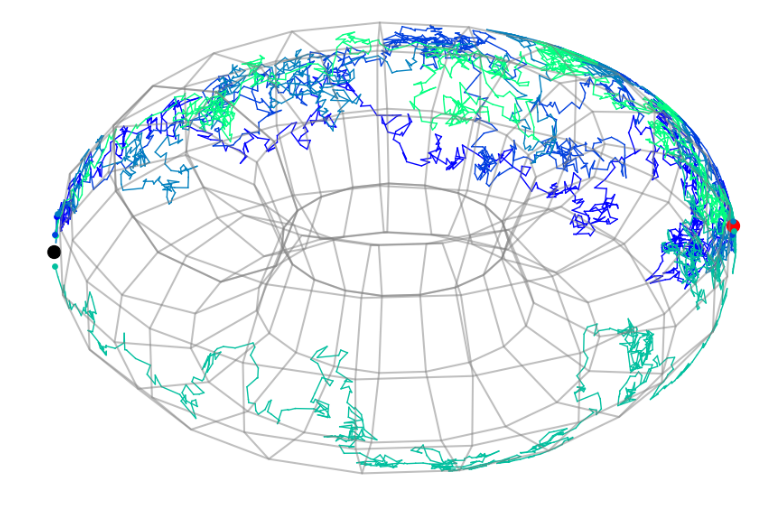
Conditioned shape process
Conditioning on hitting target \(v\) at time \(T>0\):
\[X_t|X_T=v\]
Ito stochastic process:
\[dx_t=b(t,x_t)dt\qquad\qquad\qquad\qquad\quad\\+\sigma(t,x_t)dW_t\]
True bridge:
\[dx^*_t=b(t,x^*_t)dt+a(t,x^*_t)\nabla_x\log \rho_t(x^*_t)dt\\+\sigma(t,x^*_t)dW_t\]
Score \(\nabla_x\log \rho_t\) intractable....
\[\rho_t(x)=p_{T-t}(v;x)\]
\[a(t,x)=\sigma(t,x)\sigma(t,x)^T\]
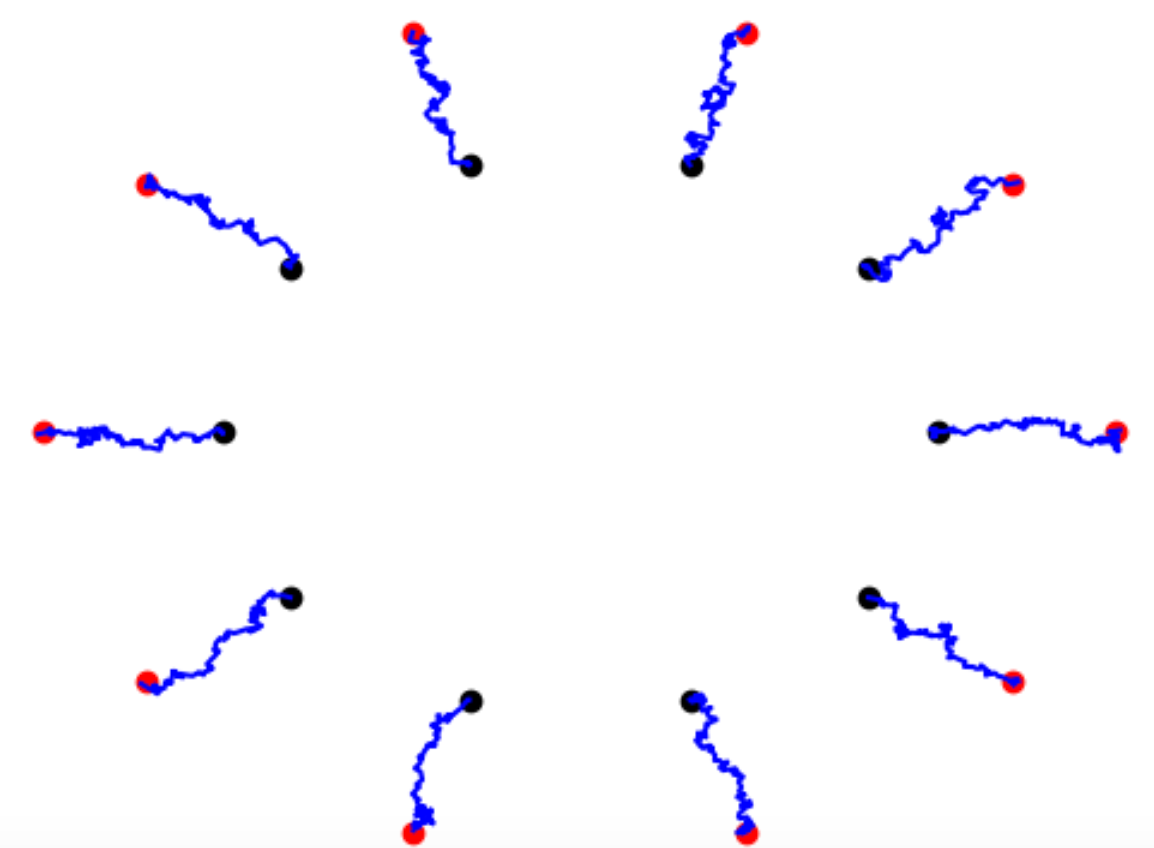
black: \(X_0\), red: \(v\)
Auxilary process:
\[d\tilde{x}_t=\tilde{b}(t,\tilde{x}_t)dt+\tilde{\sigma}(t,\tilde{x}_t)dW_t\]
Approximate bridge:
\[dx_t^\circ=b(t,x_t^\circ)dt+a(t,x_t^\circ)\nabla_x\log \tilde{\rho}_t(x_t^\circ)dt\\+\sigma(t,x_t^\circ)dW_t\]
E.g. linear process, score \(\nabla_x\log \tilde{\rho}_t\) is known in closed from
(almost) explicitly computable likelihood ratio:
\[\frac{d\mathbb P^*}{d\mathbb P^\circ}=\frac{\tilde{\rho}_T(v)}{\rho_T(v)}\Psi(x_t^\circ)\]
Backward filtering, forward guiding: van der Meulen, Schauer et al.
Ito stochastic process:
\[dx_t=b(t,x_t)dt+\sigma(t,x_t)dW_t\]
Bridge process:
\[dx^*_t=b(t,x^*_t)dt+a(t,x^*_t)\nabla_x\log \rho_t(x^*_t)dt\\+\sigma(t,x^*_t)dW_t\]
Score \(\nabla_x\log \rho_t\) intractable....
Backwards filtering, forward guiding bridges
Backwards filtering, forward guiding bridges
v.d. Meulen,Schauer,Arnaudon,Sommer,SIIMS'22
From single edges to trees
Bridge:
Leaf conditioning:
\(x_0\)
\(v\)
\(x_0\)
\(h\)
\(v_1\)
van der Meulen, Schauer'20; van der Meulen'22
Stoustrup, Nielsen, van der Meulen, Sommer
\(v_2\)
recursive,leaves to root
Backwards filter:
root to leaves
Forward guiding:
\(v\)
\(v_1\)
\(v_2\)
\(h\)
\(x_0\)
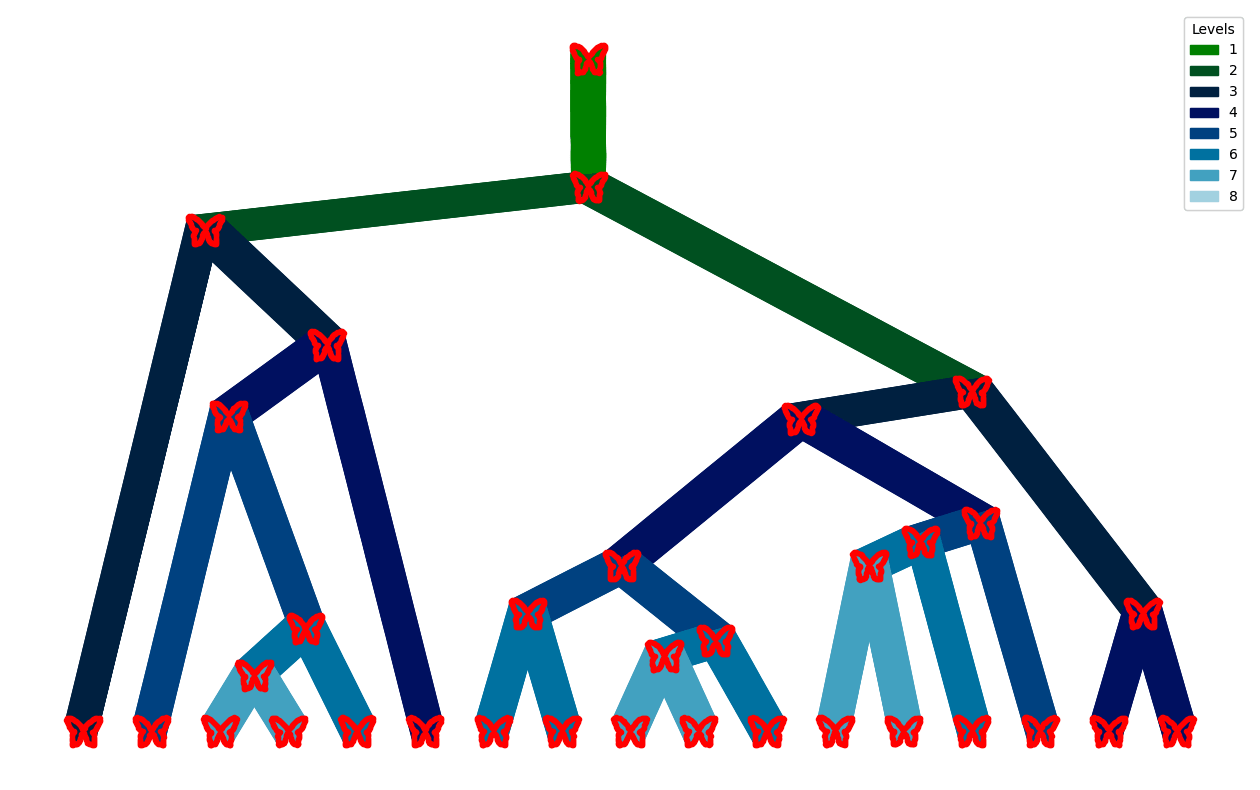
Felsenstein's pruning algorithm for shapes
Brown. motion
Brown. motion
Brown. motion
Brown. motion
branch (independent children)
incorporate leaf observations \(x_{V_T}\) into probabilistic model:
\(p(X_t|x_{V_T})\)
Doob’s h-transform
\(h_s(x)=\prod_{t\in\mathrm{ch(s)}}h_{s\to t}(x)\)
conditioned process \(X^*_t\)
approximations \(\tilde{h}\)
guided process \(X^\circ_t\)
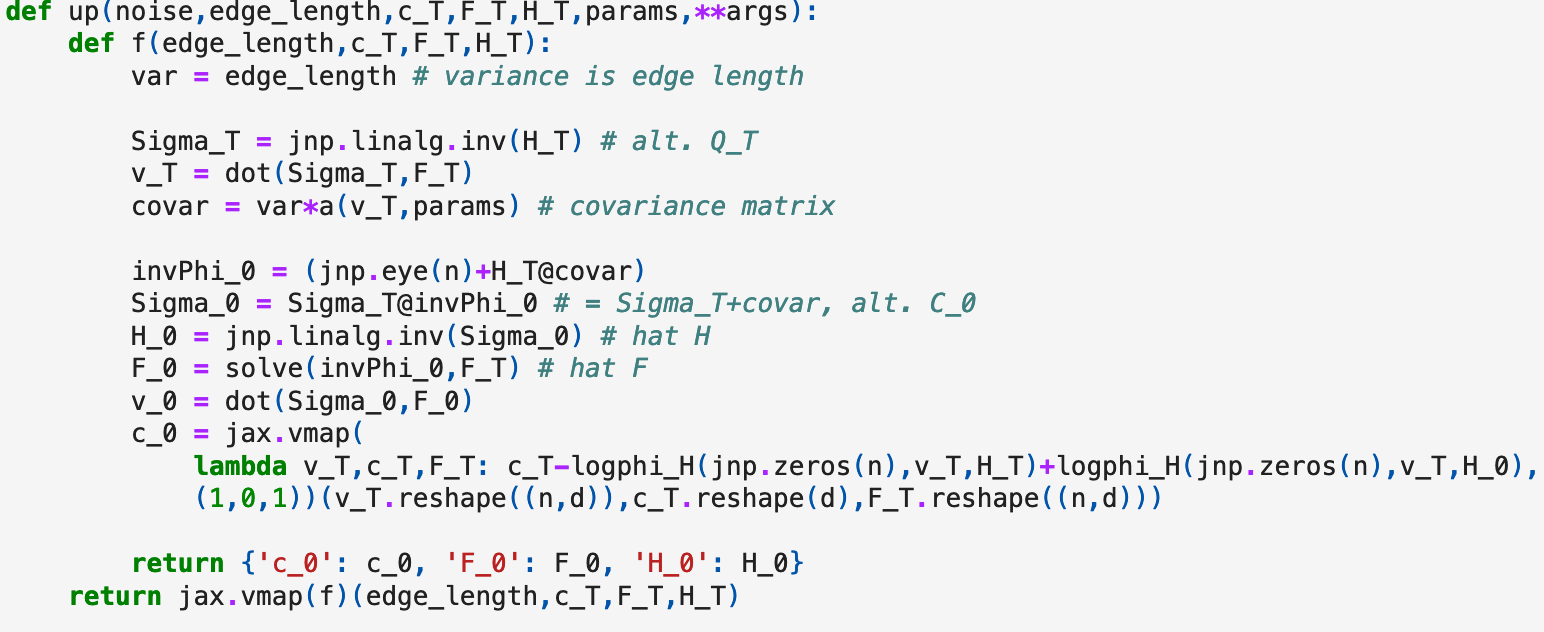
Upwards message passing
Messages:
- approximation of h-transform \[h(x,t)=e^{c+Fx+x^THx}\](Doob's h function)
Up:
- propagate c,F,H
Fuse:
- sum c,F,H

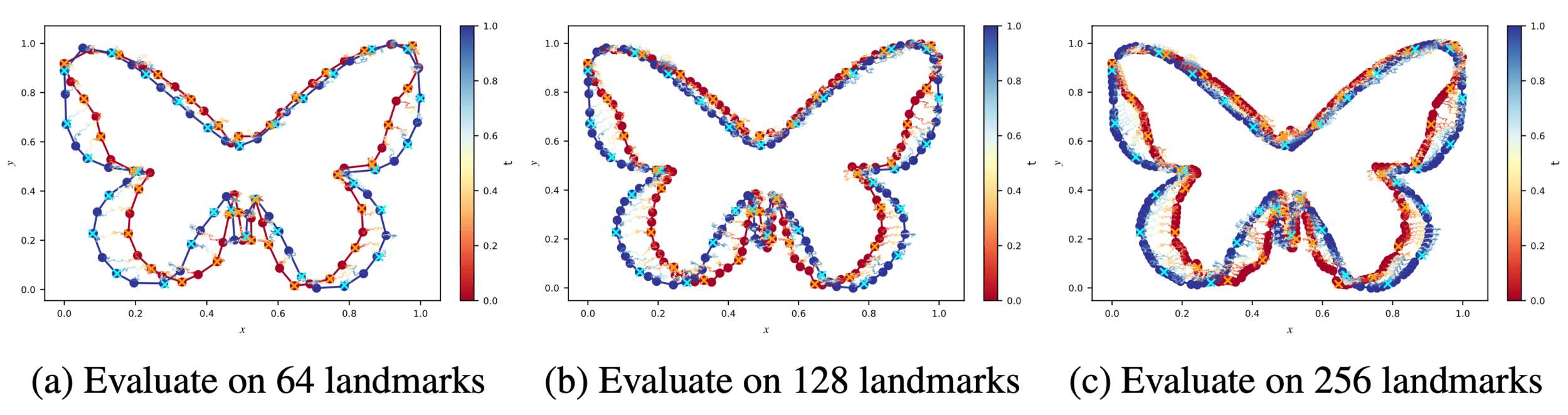
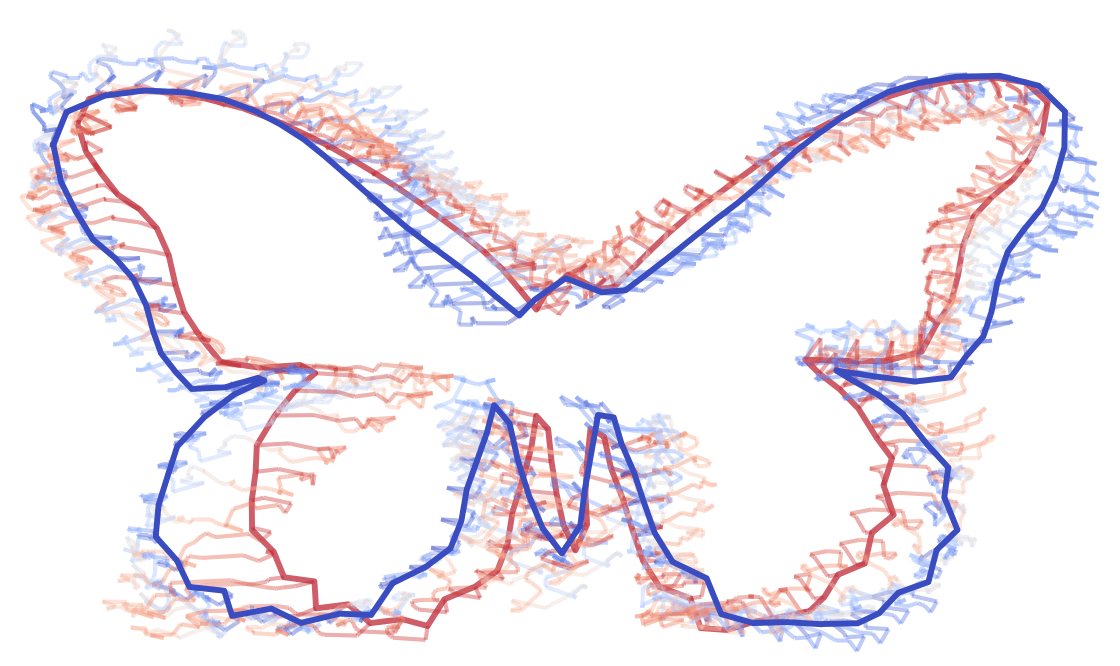
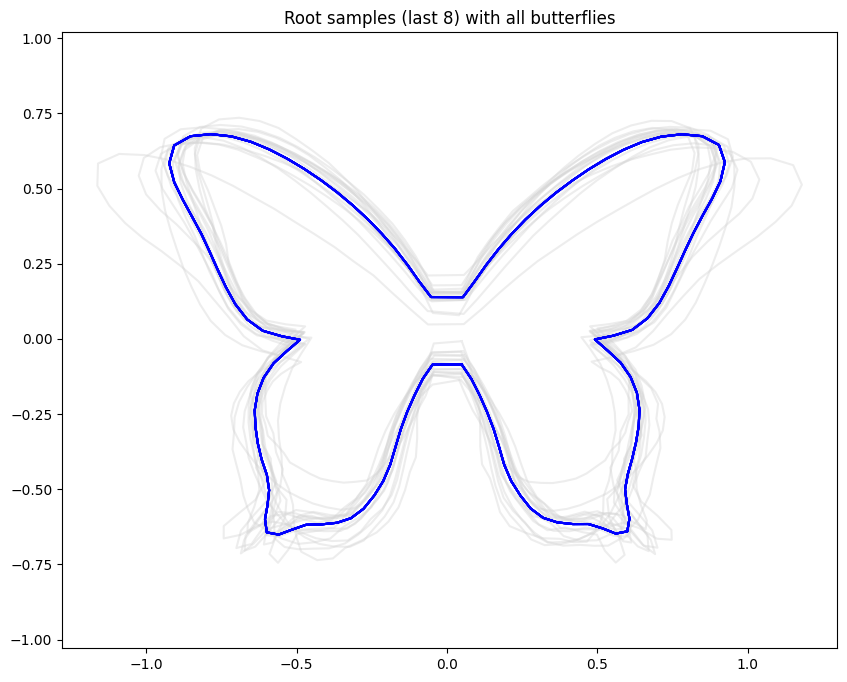
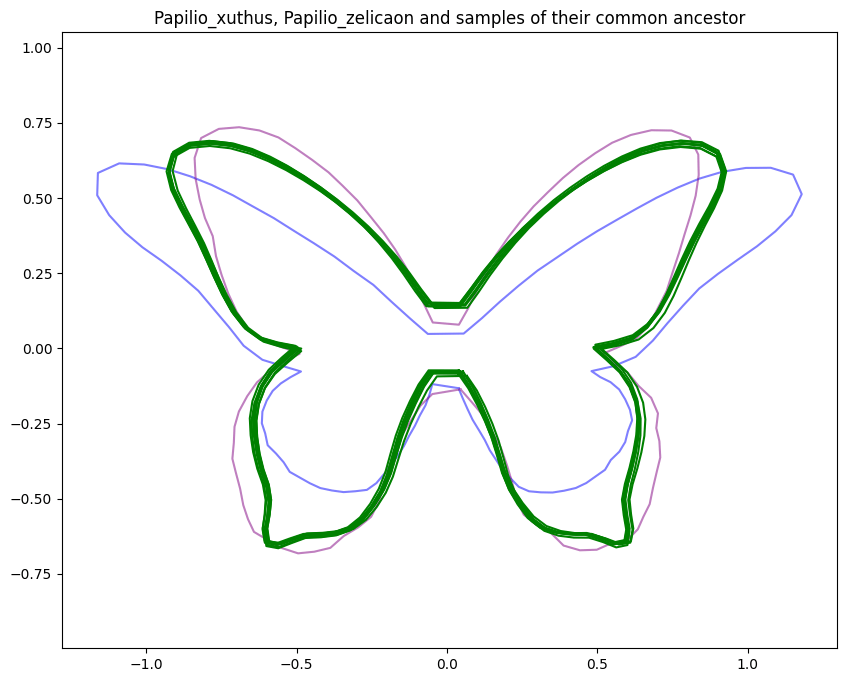
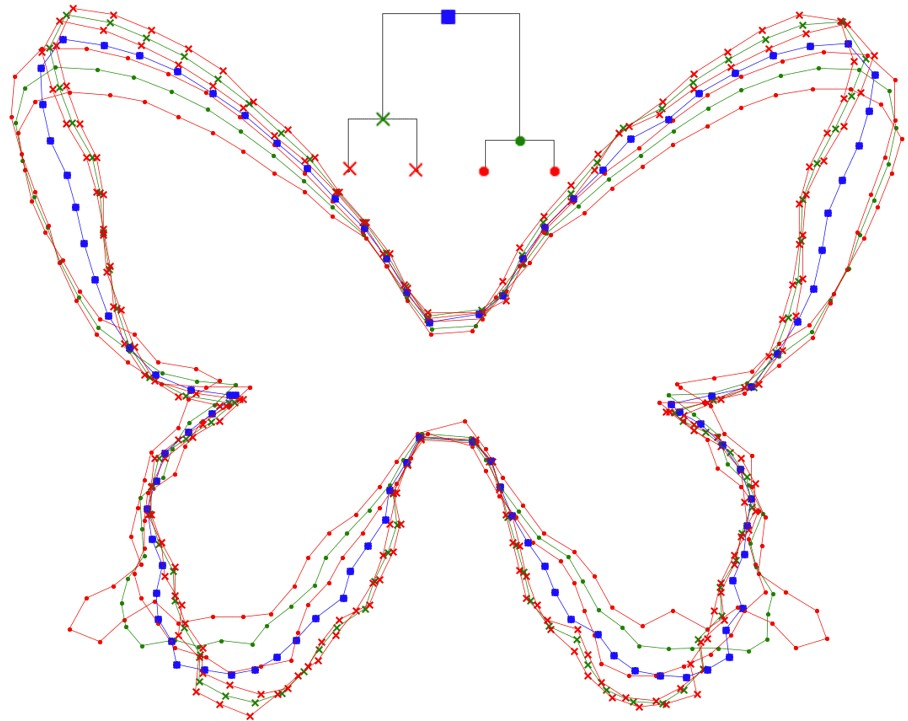
Backwards filtering, forward guiding butterflies
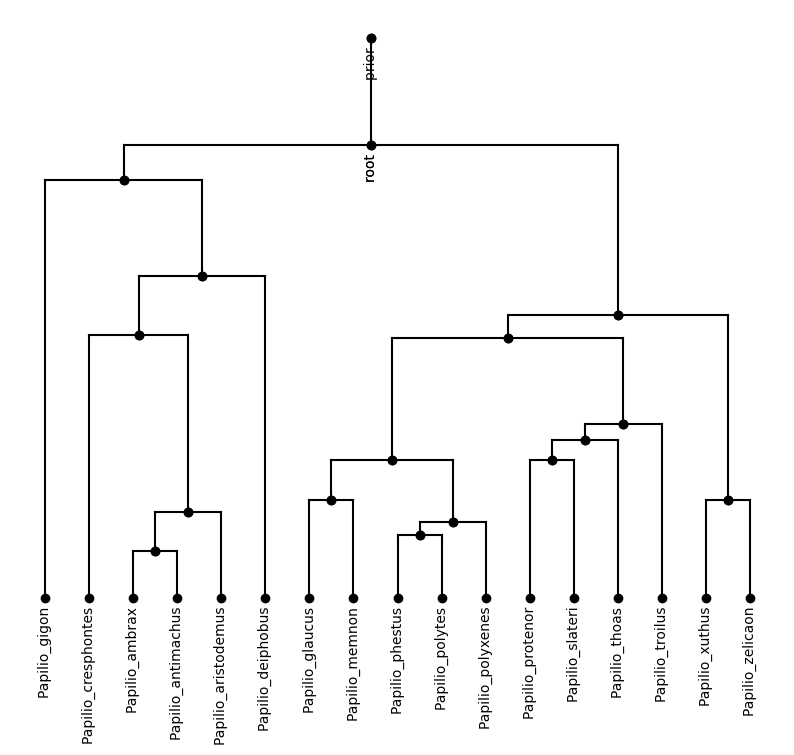
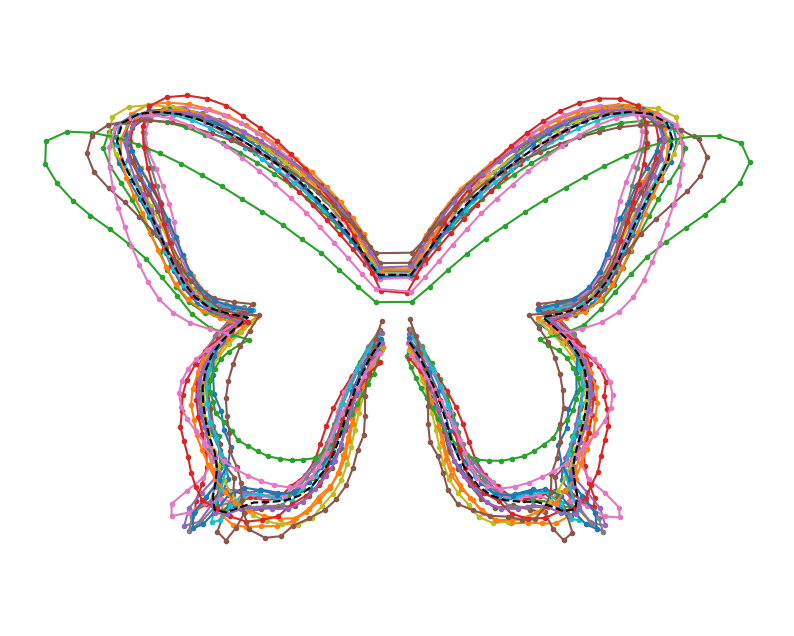
v.d. Meulen,Schauer,Sommer,'25
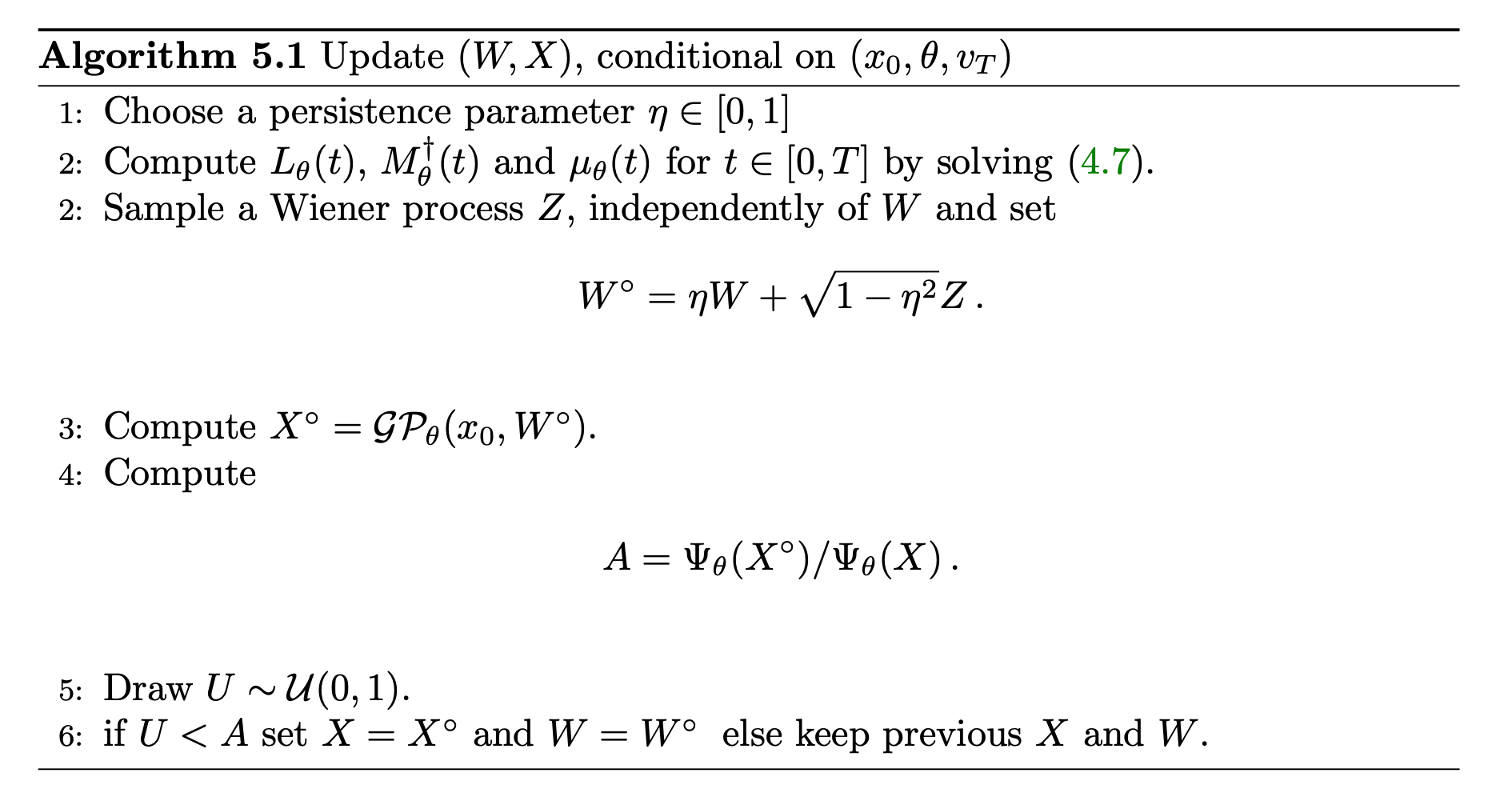
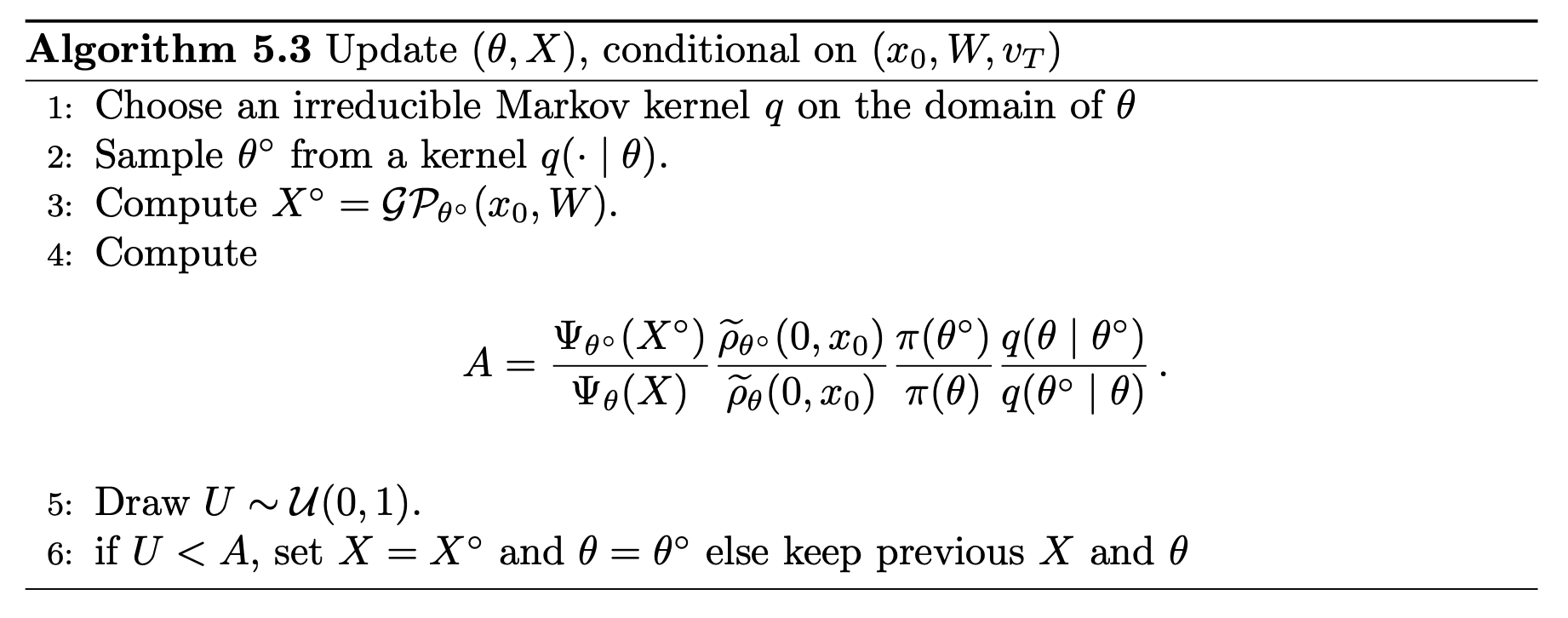
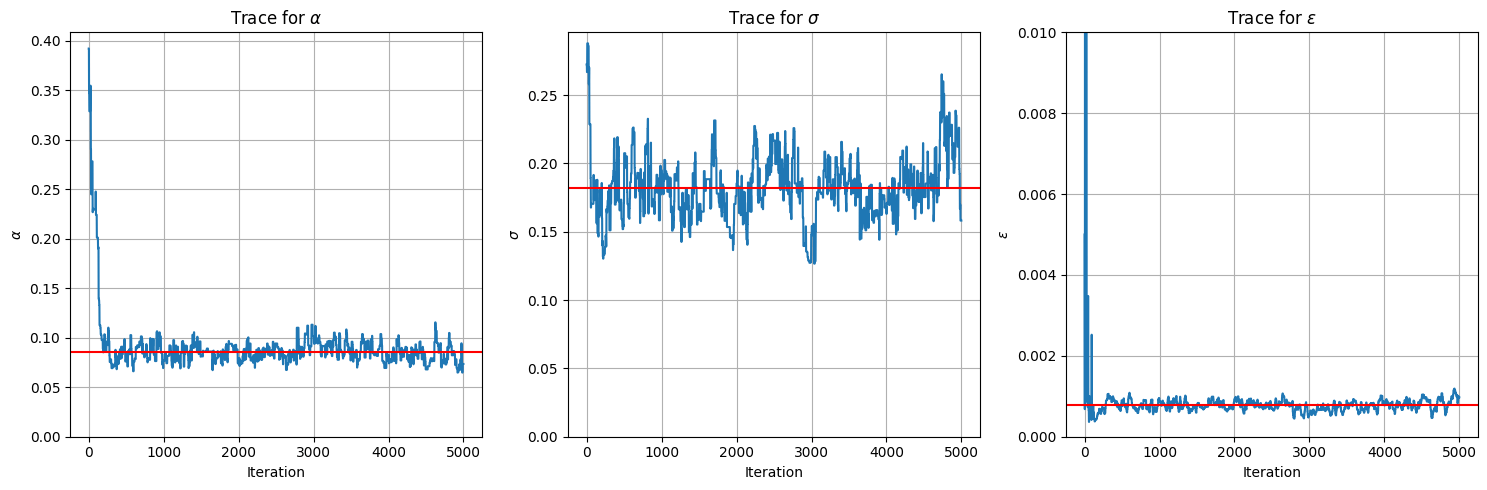
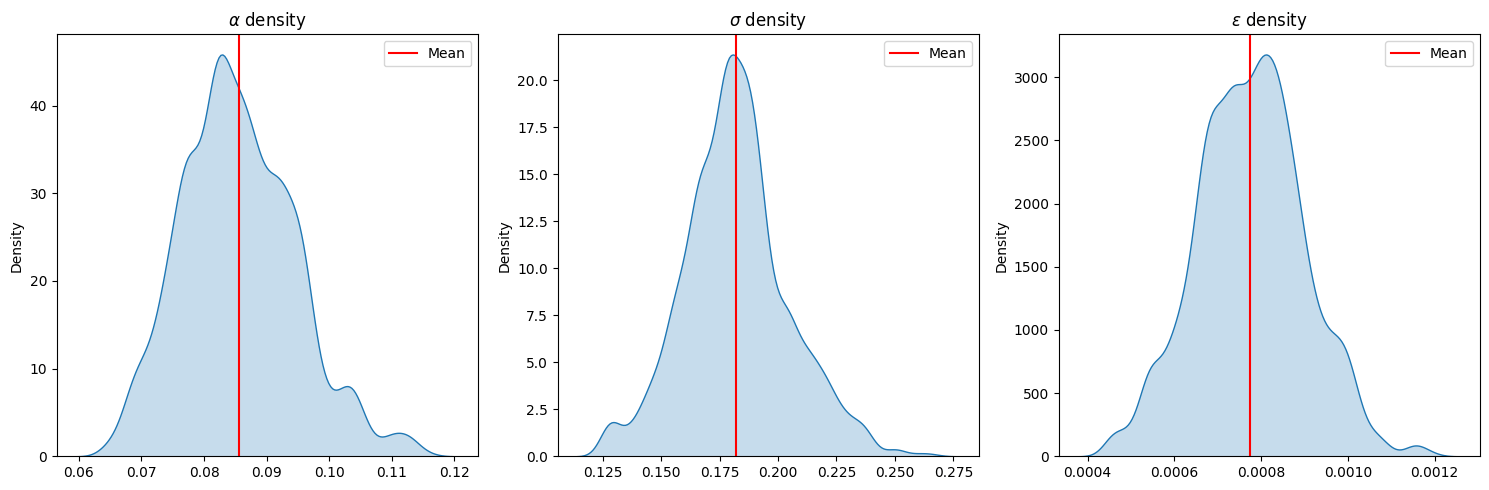
Parameter inference with MCMC
sample parameters (e.g. kernel width, amplitude)
v.d. Meulen,Schauer,Arnaudon,Sommer,SIIMS'22
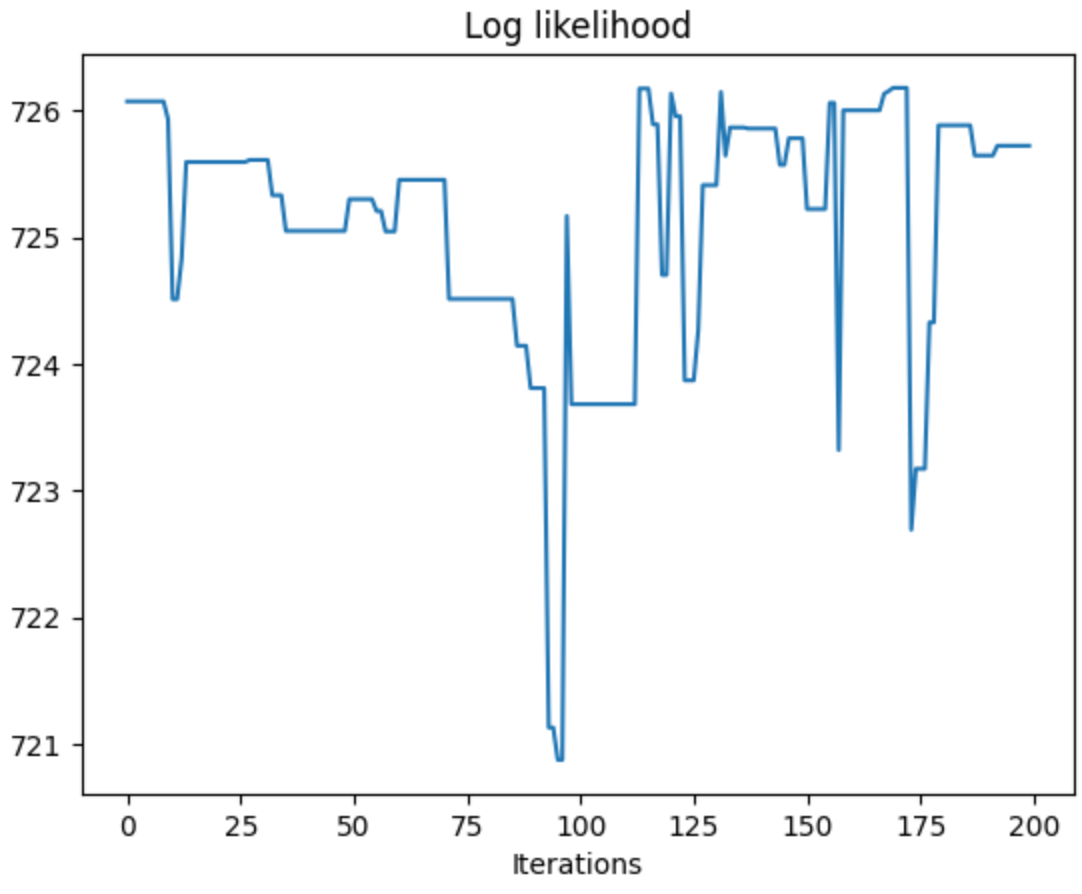
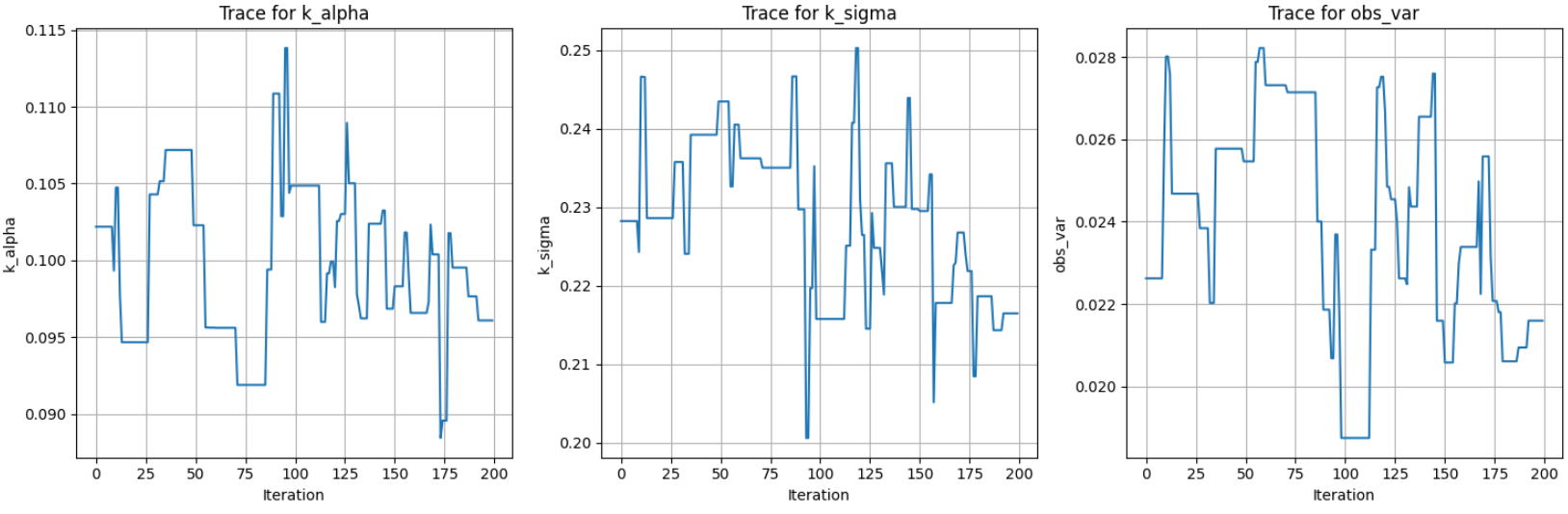
Parameter inference with MCMC
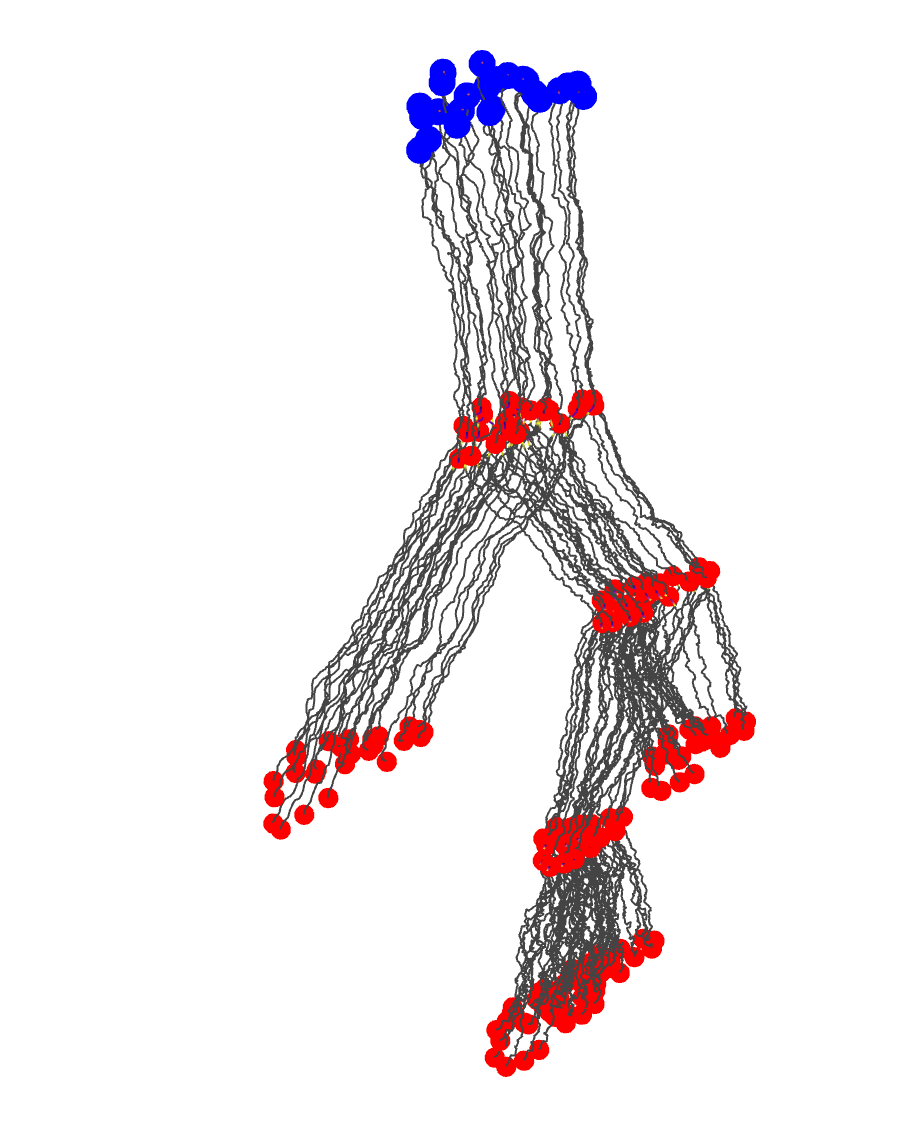
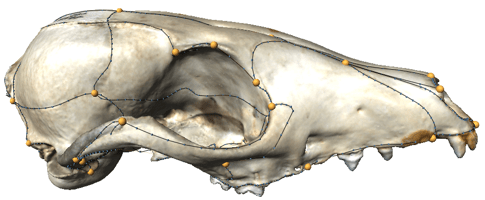
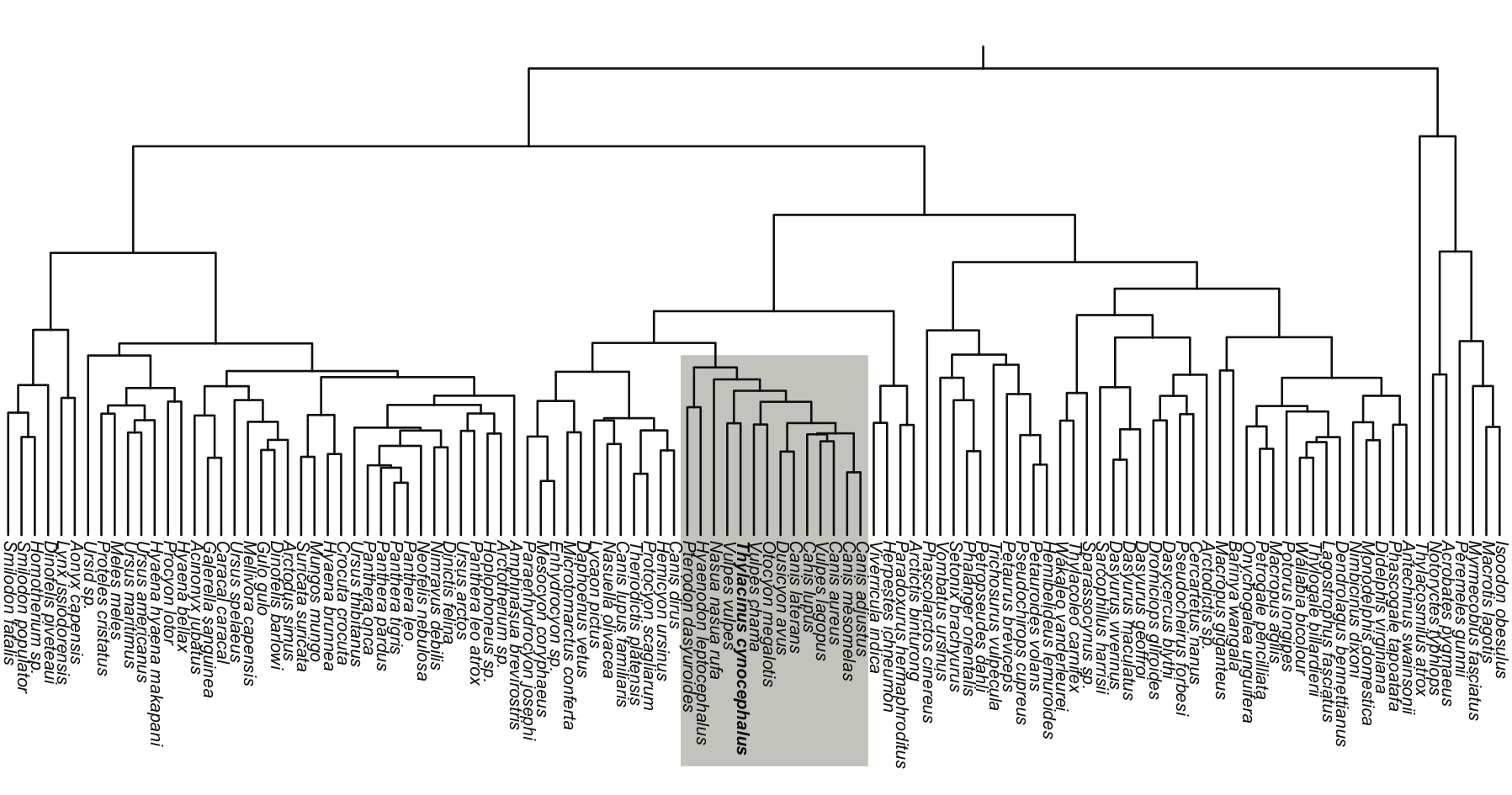
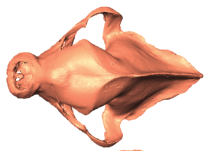
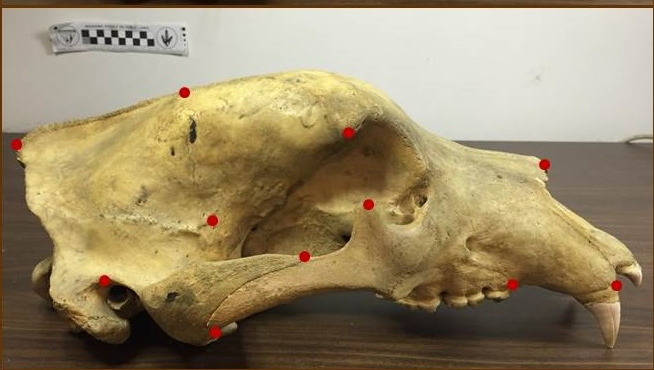
Canidae skulls
Severinsen, Hipsley, Nielsen, Sommer
Felsenstein's pruning algorithm for shapes
Brown. motion
Brown. motion
Brown. motion
Brown. motion
1) What is a shape Brownian motion?
2) How do we condition the nonlinear process on shape observations?
3) How do we perform inference in the full model?
Other takes:
Upwards LDDMM: recursive shape matching
Severinsen, Hipsley, Nielsen, Sommer
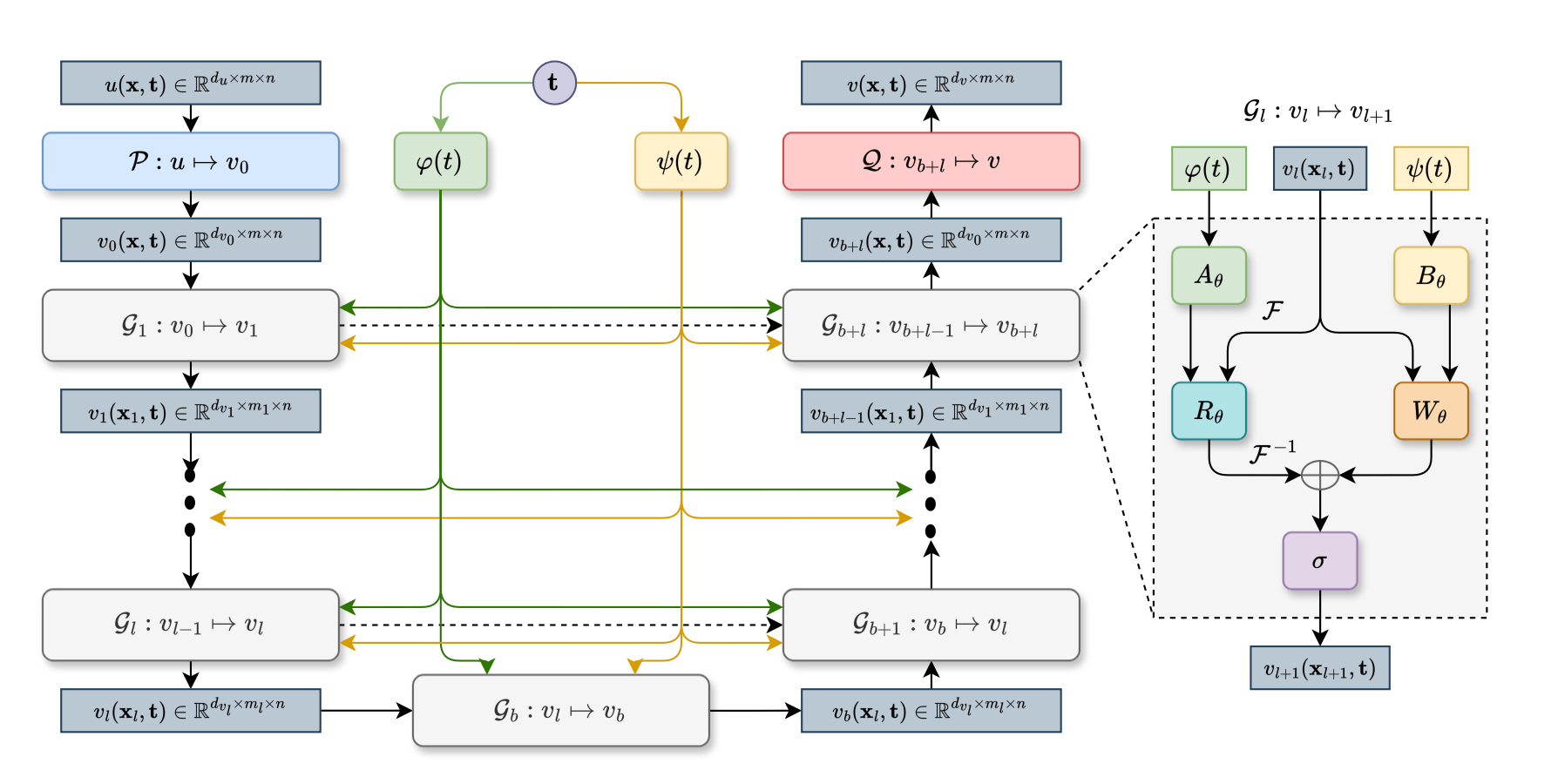
Infinite dimensions and score learning
Train a neural network to learn the score in the bridge SDE:
\[dx^*_t=b(t,x^*_t)dt+a(t,x^*_t)\nabla_x\log \rho_t(x^*_t)dt\\+\sigma(t,x^*_t)dW_t\]
Intrinsic shape processes
Markussen,CVIU'07; Budhiraja,Dupuis,Maroulas,Bernoulli'10
Trouve,Vialard,QAM'12;Vialard,SPA'13;Marsland/Shardlow,SIIMS'17
Arnaudon,Holm,Sommer,IPMI'17; FoCM'18; JMIV'19
Arnaudon,v.d. Meulen,Schauer,Sommer'21
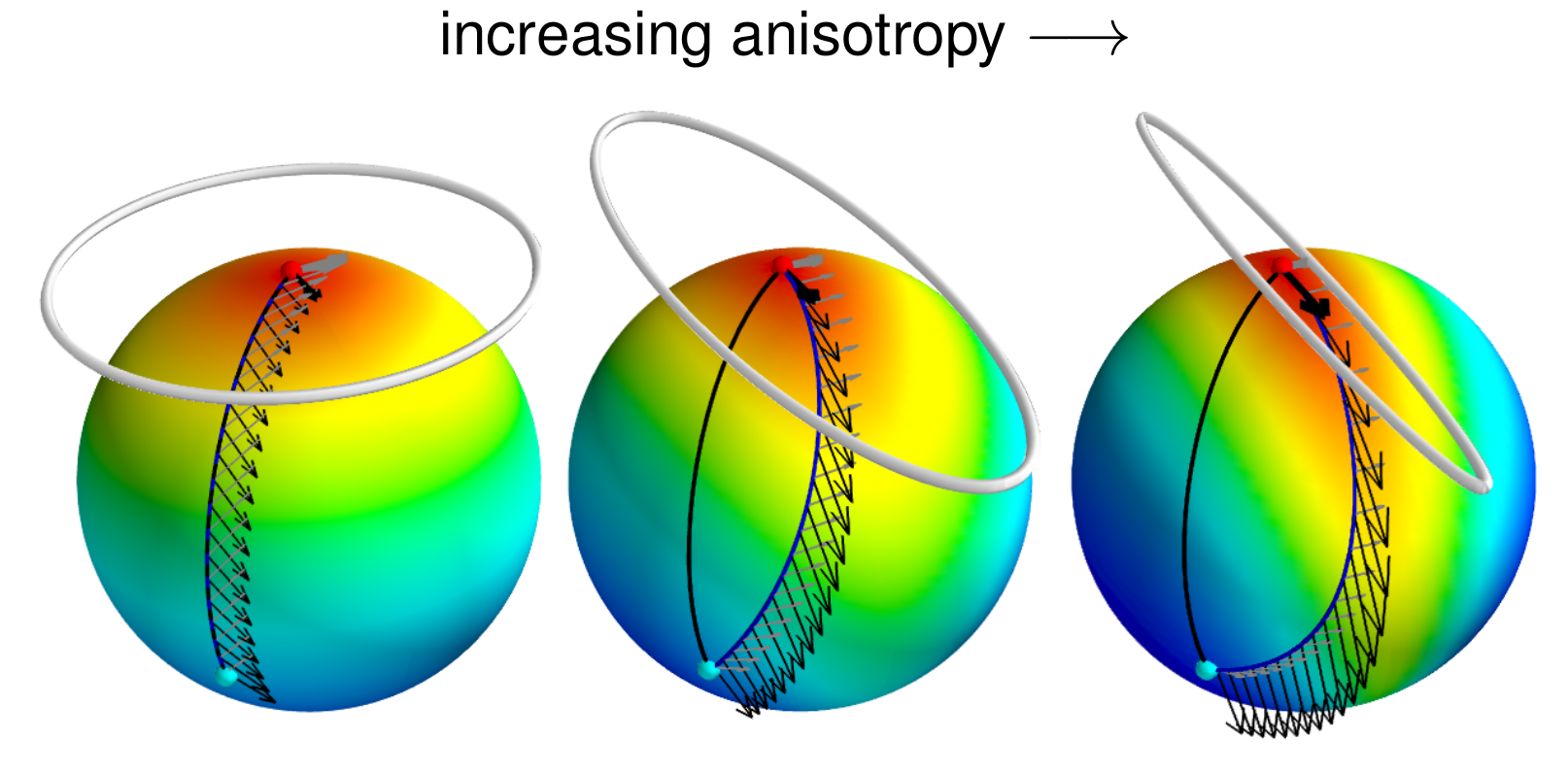
Most probable flows
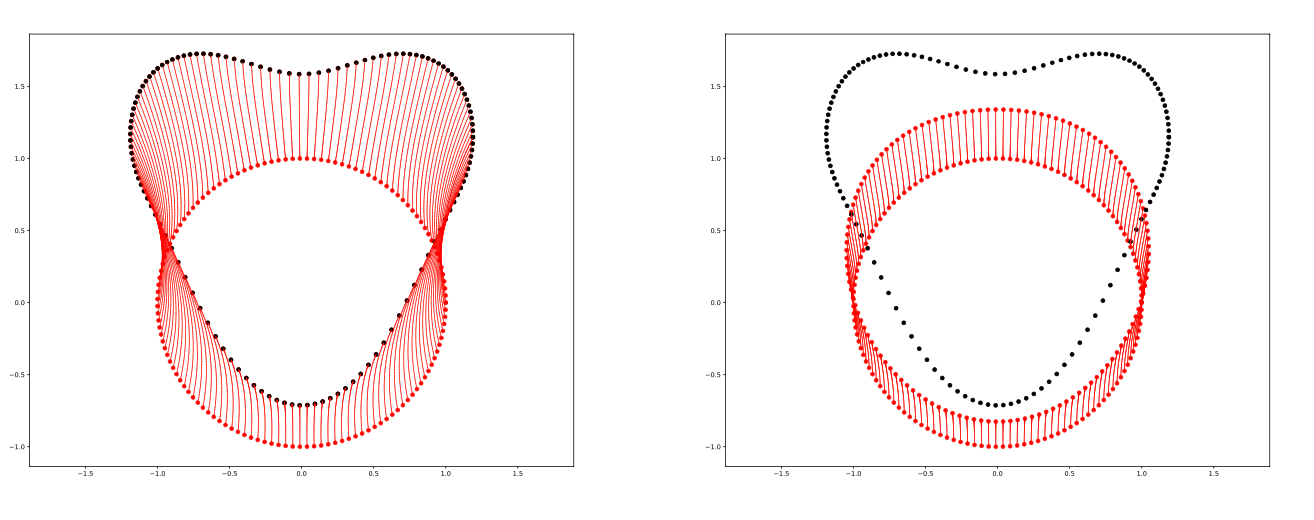
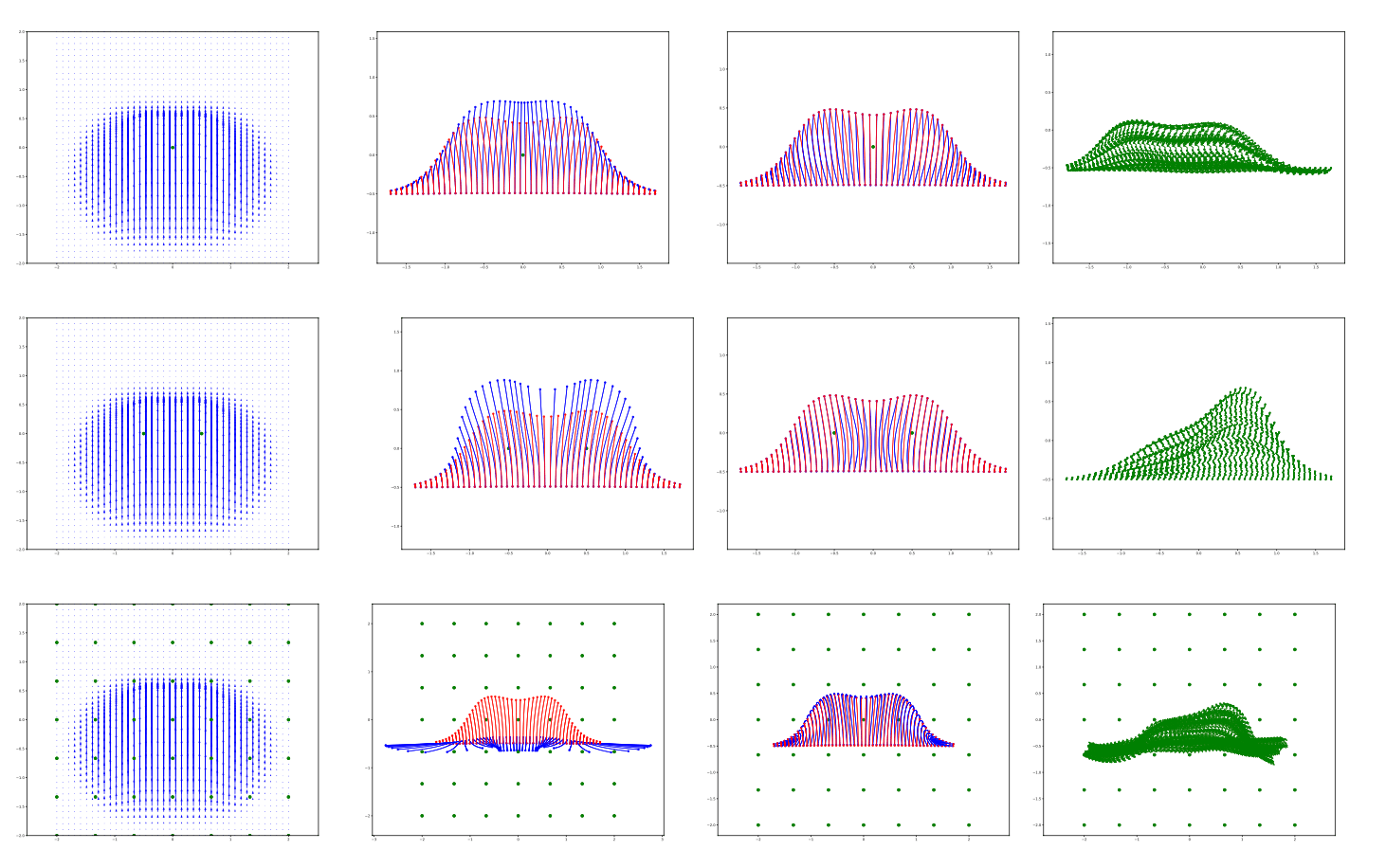
Geometric statistics
Diffusion mean
Most probable paths
Eltzner, Huckemann, Grong, Corstanje,van der Meulen,Schauer,Sommer et al.
Manifold bridges
Software
Jax magic... in milliseconds:
- Trees with millions of nodes
- shapes with millions of landmarks
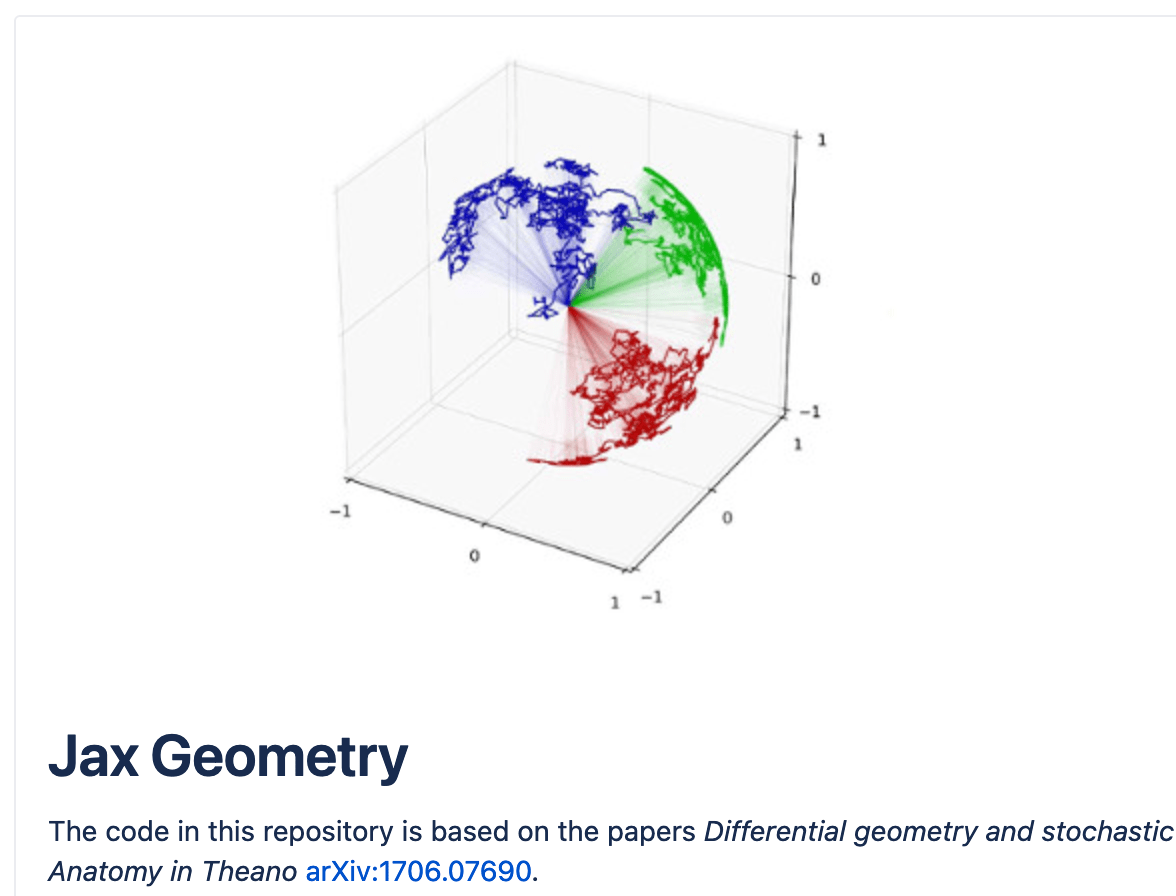
Geometry, stochastics, geometric statistics
JaxGeometry: https://github.com/computationalevolutionarymorphometry/jaxgeometry CCEM: http://www.ccem.dk
Hyperiax: https://github.com/computationalevolutionarymorphometry/hyperiax slides: https://slides.com/stefansommer
References:
- Grong, Sommer: Most probable paths for developed processes, https://arxiv.org/abs/2211.15168
- Grong, Sommer: Most probable flows for Kunita SDEs, https://arxiv.org/abs/2209.03868
- Sommer, Schauer, v. d. Meulen: Stochastic flows and shape bridges, Oberwolfach, 2021
- Baker, Besnier, Sommer: A function space perspective on stochastic shape evolution, https://arxiv.org/abs/2302.05382
- Yang, Baker, Severinsen, Hipsley, Sommer: Simulating infinite-dimensional nonlinear diffusion bridges, https://arxiv.org/abs/2405.18353
- Baker, Yang, Severinsen, Hipsley, Sommer: Conditioning non-linear and infinite-dimensional diffusion processes, https://arxiv.org/abs/2402.01434
- Hansen, Eltzner, Huckemann, Sommer: Diffusion Means in Geometric Spaces, Bernoulli, 2023, arXiv:2105.12061
- Grong, Sommer: Most probable paths for anisotropic Brownian motions on manifolds, FoCM 2022, arXiv:2110.15634
- Philipp Harms, Peter W. Michor, Xavier Pennec, Stefan Sommer: Geometry of sample spaces, Diff. Geom. and its Appl., 2023, arXiv:2010.08039
- Arnaudon, v.d. Meulen, Schauer, Sommer: Diffusion bridges for stochastic Hamiltonian systems and shape evolutions,SIIMS,2022,arXiv:2002.00885
- Højgaard Jensen, Sommer: Simulation of Conditioned Diffusions on Riemannian Manifolds, 2021, arXiv:2105.13190.
- Arnaudon, Holm, Sommer: A Geometric Framework for Stochastic Shape Analysis, Foundations of Computational Mathematics, 2019, arXiv:1703.09971.
- Sommer, Svane: Modelling Anisotropic Covariance using Stochastic Development and Sub-Riemannian Frame Bundle Geometry, JoGM, 2017, arXiv:1512.08544.
- Arnaudon, Holm, Sommer: A Stochastic Large Deformation Model for Computational Anatomy, IPMI 2017, arXiv:1612.05323.