Stochastic shapes and mean sampling
Stefan Sommer, University of Copenhagen

Faculty of Science, University of Copenhagen
Stochastic Morphometrics 2022
shapes - geometric statistics - bridges - mean sampling
w/ Alexis Arnaudon, Darryl Holm, Sarang Joshi, Frank v.d. Meulen, Moritz Schauer, Benjamin Eltzner, Stephan Huckemann, Line Kuhnel, Mathias H. Jensen, Pernille E.H. Hansen, Mads Nielsen, Rasmus Nielsen, Christy Hipsley
Villum foundation
Novo nordisk foundation
University of Copenhagen
Statistical shape analysis
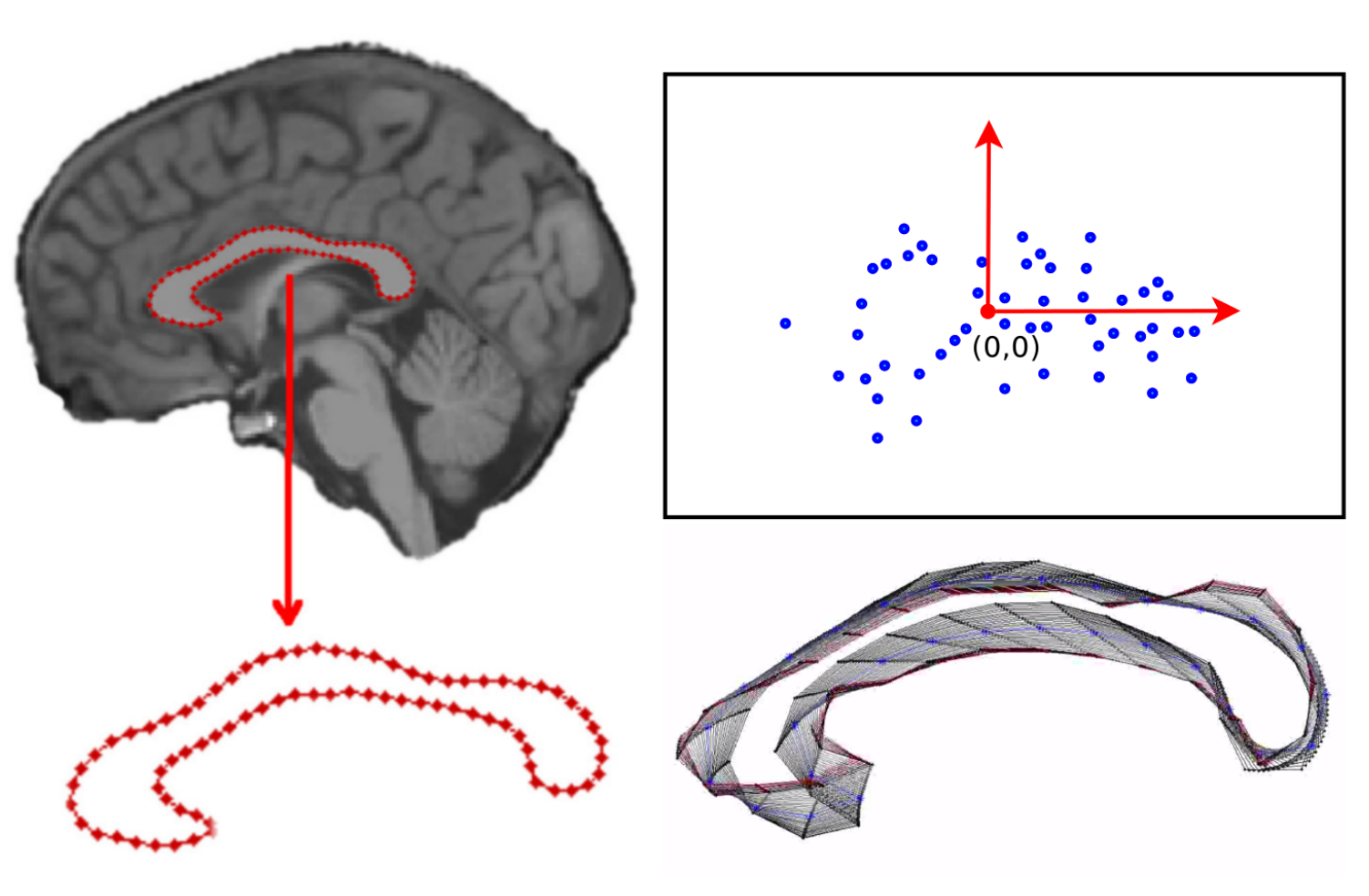
Deformations and shape
action: \(\phi.s=\phi\circ s\) (shapes)
\(\phi.s=s\circ\phi^{-1}\) (images)
\( \phi \)
\( \phi \) warp of domain \(\Omega\) (2D or 3D space)
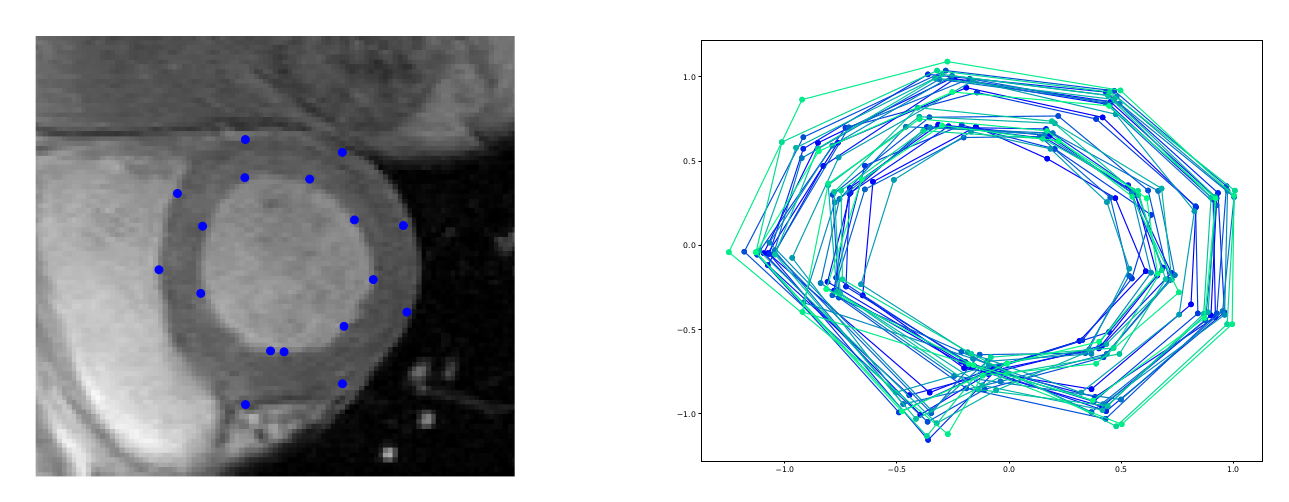
landmarks: \(s=(x_1,\ldots,x_n)\)
curves: \(s: \mathbb S^1\to\mathbb R^2\)
surfaces: \(s: \mathbb S^2\to\mathbb R^3\)
Riemannian view
\( \phi_t:[0,T]\to\mathrm{Diff}(\Omega) \) path of diffeomorphisms (parameter t)
LDDMM: Grenander, Miller, Trouve, Younes, Christensen, Joshi, et al.
Evolution with noise
Markussen,CVIU'07; Budhiraja,Dupuis,Maroulas,Bernoulli'10
Trouve,Vialard,QAM'12;Vialard,SPA'13;Marsland/Shardlow,SIIMS'17
Staneva,Younes'17; Sommer,Arnaudon,Kuhnel,Joshi,MFCA'17
Arnaudon,Holm,Sommer,IPMI'17; FoCM'18; JMIV'19
Arnaudon,v.d. Meulen,Schauer,Sommer'21
Least-squares \(\leftrightarrow\) probabilistic
Deterministic:
- \(\phi_t\) geodesic evolution
- exact matching:
\(\quad\mathrm{argmin}_{\phi_1.s_0=s_1} E(\phi_t)\) - inexact matching:
\(\quad\mathrm{argmin}_{\phi_t} E(\phi_t)\) - distance:
\(\quad d(s_0,s1)^2=E(\phi_t)\) - Riemannian least-
squares
Stochastic:
- \(\phi_t\) stochastic process
- bridge:
\(\quad \phi_t|\phi_T.s_0=s_1\) - bridge + noise in observation:
\(\quad \phi_t|\phi_T.s_0+\epsilon=s_1\) - (log) transition density
\(\quad -\log p_T(s_1; s_0)\) - ML/MAP
Inferring geometry of landmarks spaces
- Landmarks \(\mathbf{q}=(q_1,\ldots,q_n),\,q_i\in\Omega\subseteq\mathbb R^d\)
- LDDMM cometric \( \left<\xi,\eta\right>_{\mathbf q}=\xi^T K(\mathbf q,\mathbf q)\eta\)
- kernel \(K(\mathbf q_1,\mathbf q_2)=\alpha e^{-1\frac12 x^T\Sigma^{-1}x}\mathrm{Id}_d\)
- Riemannian Brownian motion
$$dq_t^i=g^{kl}\Gamma(\mathbf q_t)^i_{kl}dt+\sqrt{g^*(\mathbf q_t)}^idW_t$$
- Riemannian Brownian motion transition density:
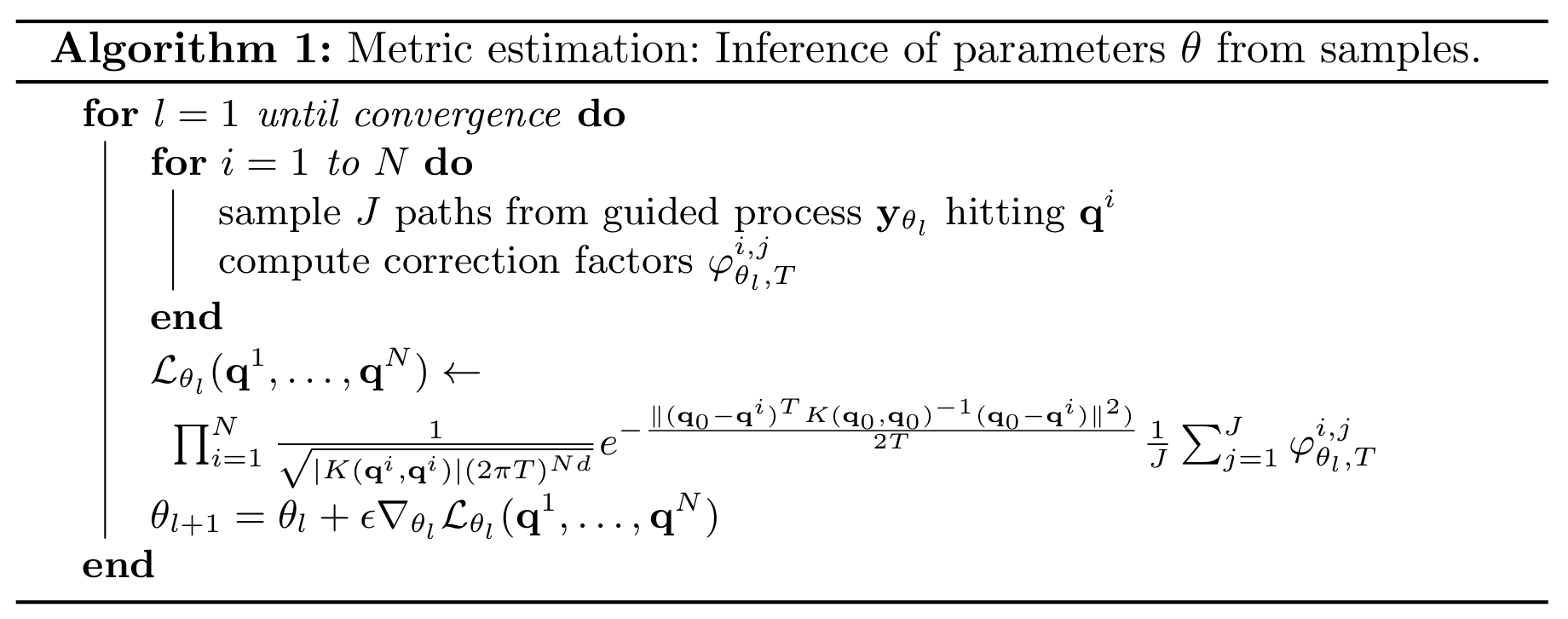
$$p_{T,\theta}(\mathbf v)=\frac1{\sqrt{|K(\mathbf v,\mathbf v)|(2\pi T)^{Nd}}}e^{-\frac{\|(\mathbf q_0-\mathbf v)^TK(\mathbf q_0,\mathbf q_0)^{-1}(\mathbf q_0-\mathbf v)\|^2}{2T}}\mathbb E_{\mathbf y_\theta}[\varphi_{\theta}(\mathbf y)]$$
Sommer,Arnaudon,Kuhnel,Josh,MFCA'17
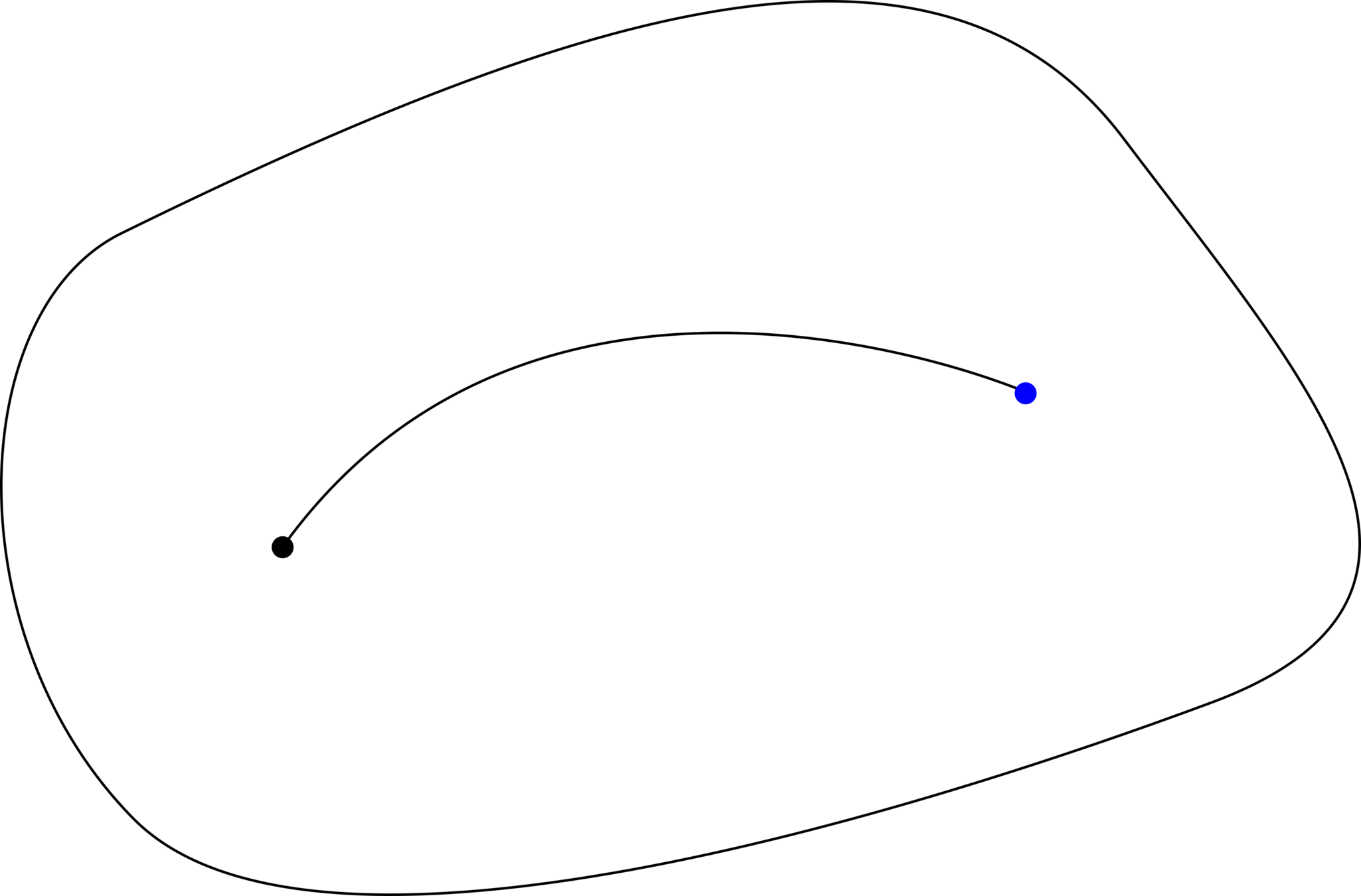
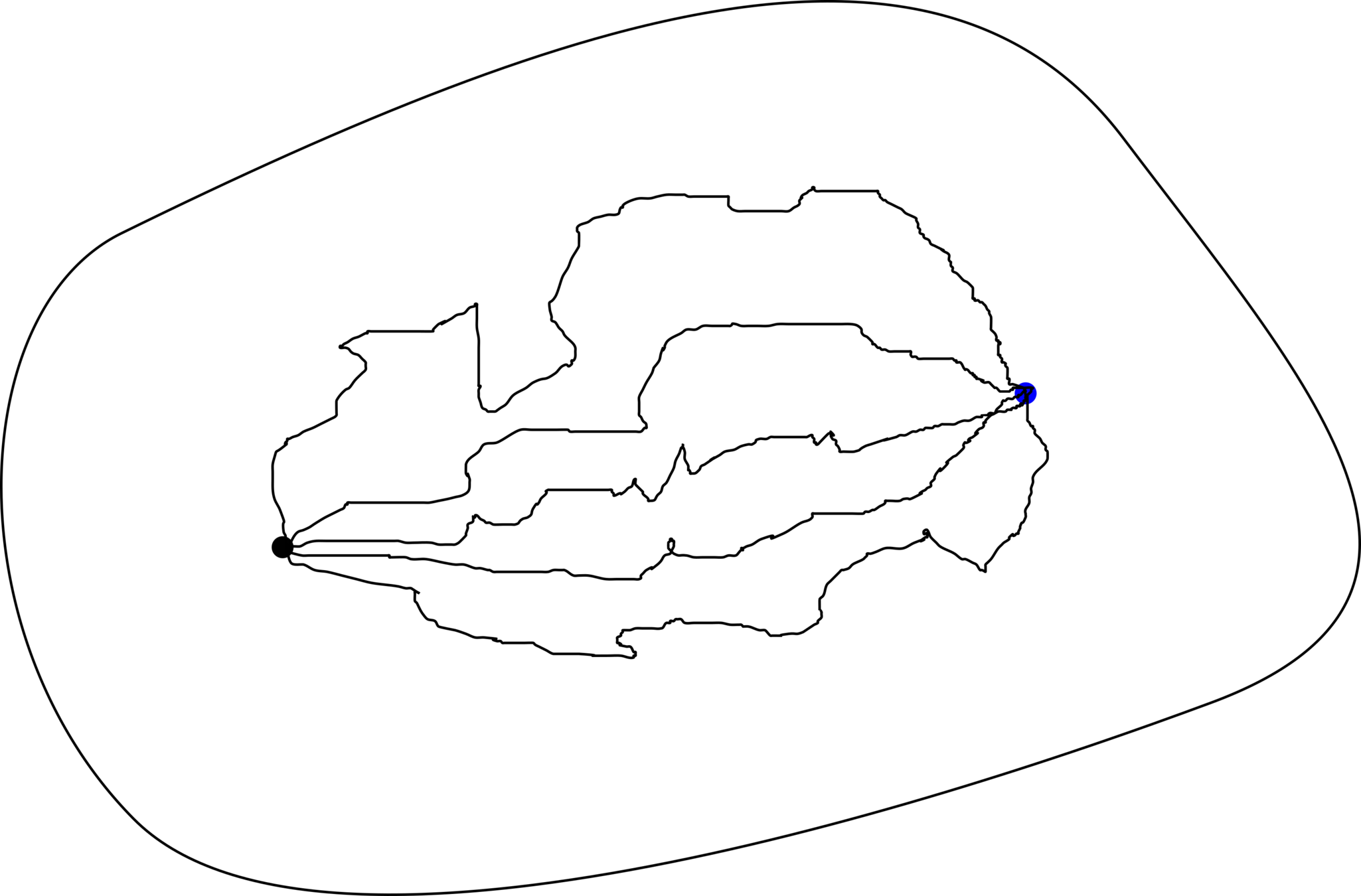
Approximating \(p_T(v)\): Stochastic matching
bridge sampling
Delyon/Hu 2006:
\(\sigma\) invertible:
- guided bridge proposal$$dy_t = b(t,y_t)dt - \frac{y_t-v}{T-t}dt + \sigma(t,y_t)dW_t$$
- \(y_T=v\) a.s.
- \(x_t|x_T=v\) absolute continuous wrt. \(y_t\)
- \(\mathbb E_{x_t|x_T=v}[f(x_t)]\propto \mathbb E_{y_t}[f(y_t)\varphi(y_t)]\)
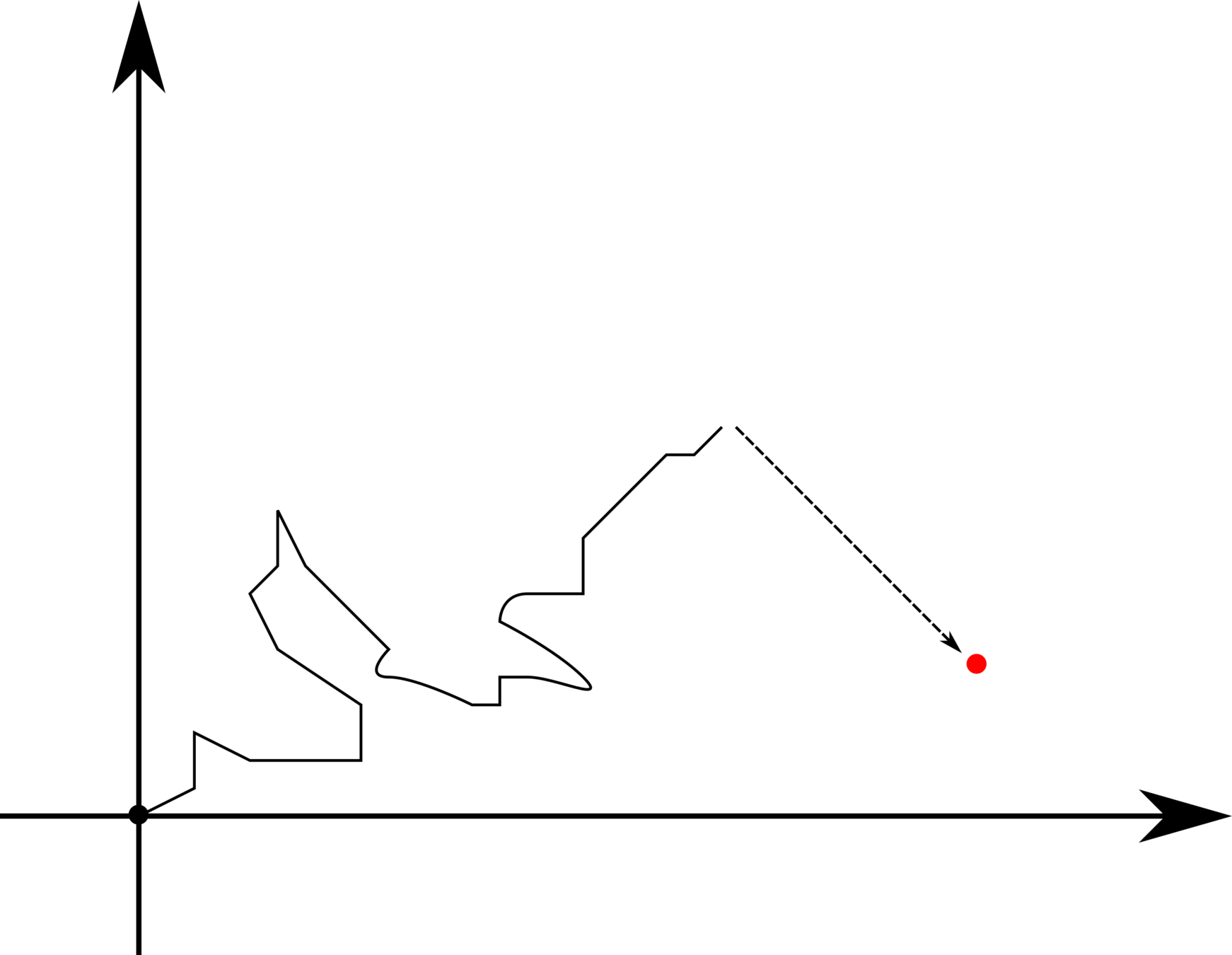
\(v\)
\(x_0\)
\(x_t\)
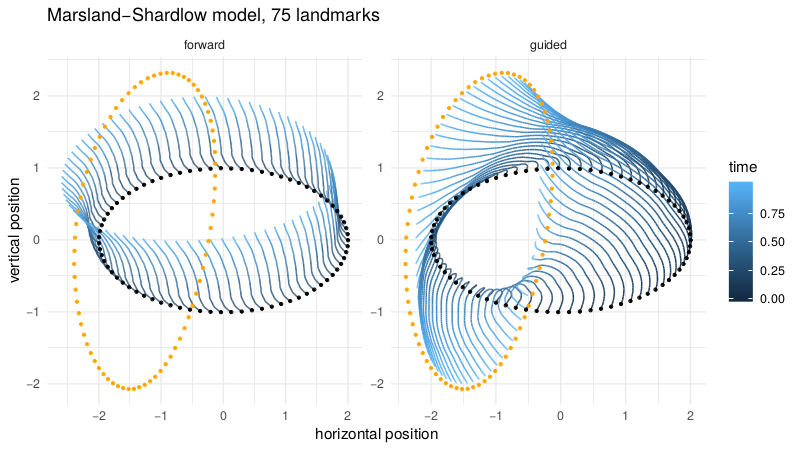
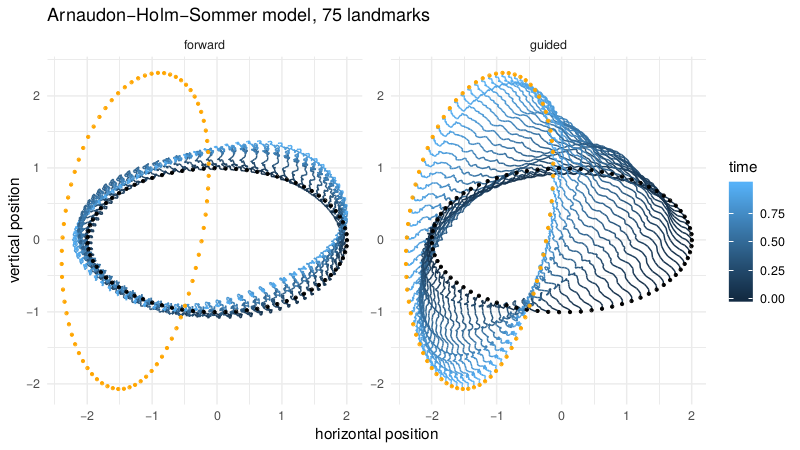
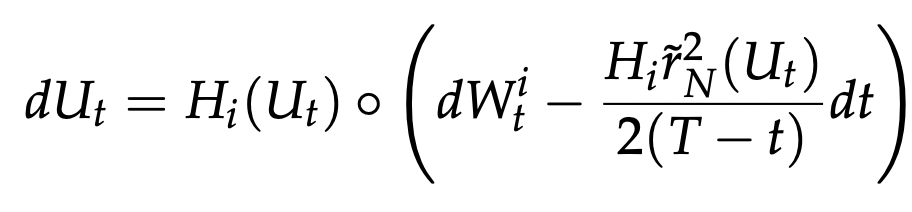
Stochastic Euler-Poincaré model
Stochastic perturbation of the reconstruction equation
- right-invariant noise, momentum map preserved
- stochastic Euler-Poincare principle
- landmark equations:
\(\quad q_i = \frac{\partial h}{\partial p_i} dt+\sum_{l=1}^J\frac{\partial\phi_l}{\partial p_i}\circ dW_t^l\)
\(\quad p_i = -\frac{\partial h}{\partial q_i} dt+\sum_{l=1}^J\frac{\partial\phi_l}{\partial q_i}\circ dW_t^l\) -
image equations:
\(\quad 0=d\mathbf m+\big( (\mathbf u\cdot\nabla)\mathbf m+\mathbf m\cdot(D\mathbf v)^T+\mathrm{div}(\mathbf u)\mathbf m\big)dt\)
\(\quad\quad+\sum_{l=1}^J\big(\mathbf\sigma_l\cdot\nabla)\mathbf m+\mathbf m\cdot(D\mathbf\sigma_l)^T+\mathrm{div}(\mathbf\sigma_l)\mathbf m\big)\circ dW^l_t\)
\(\quad dI=-\nabla I\cdot\mathbf udt+\sum_{l=1}^J\nabla I\cdot\mathbf\sigma_l\circ dW_t^l\)
Arnaudon,Holm,Sommer,IPMI'17; FoCM'18; JMIV'19
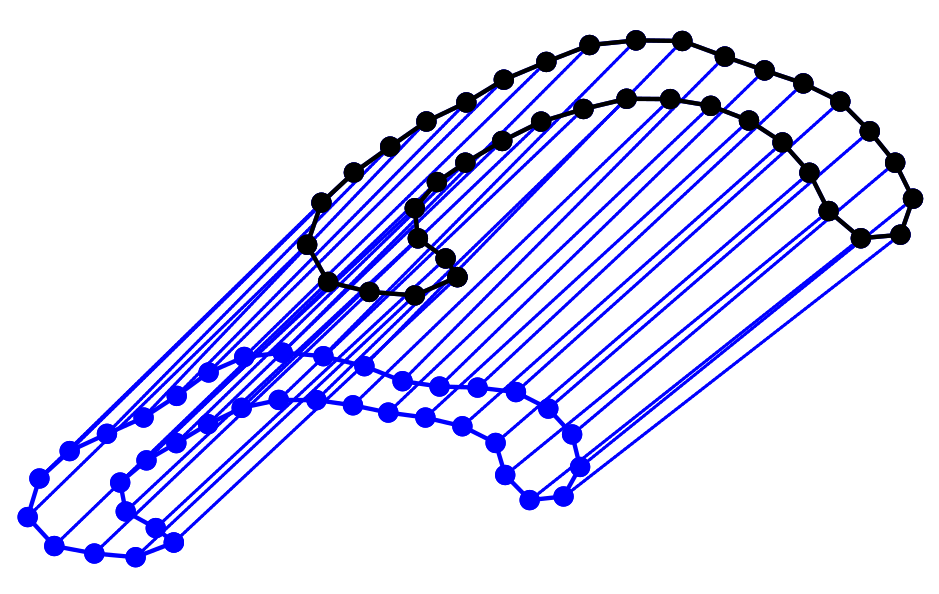
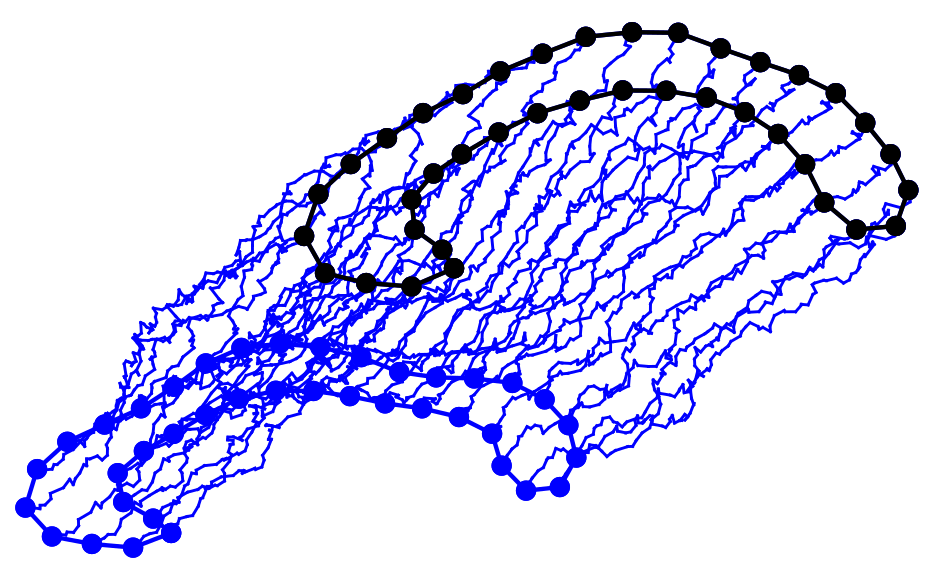
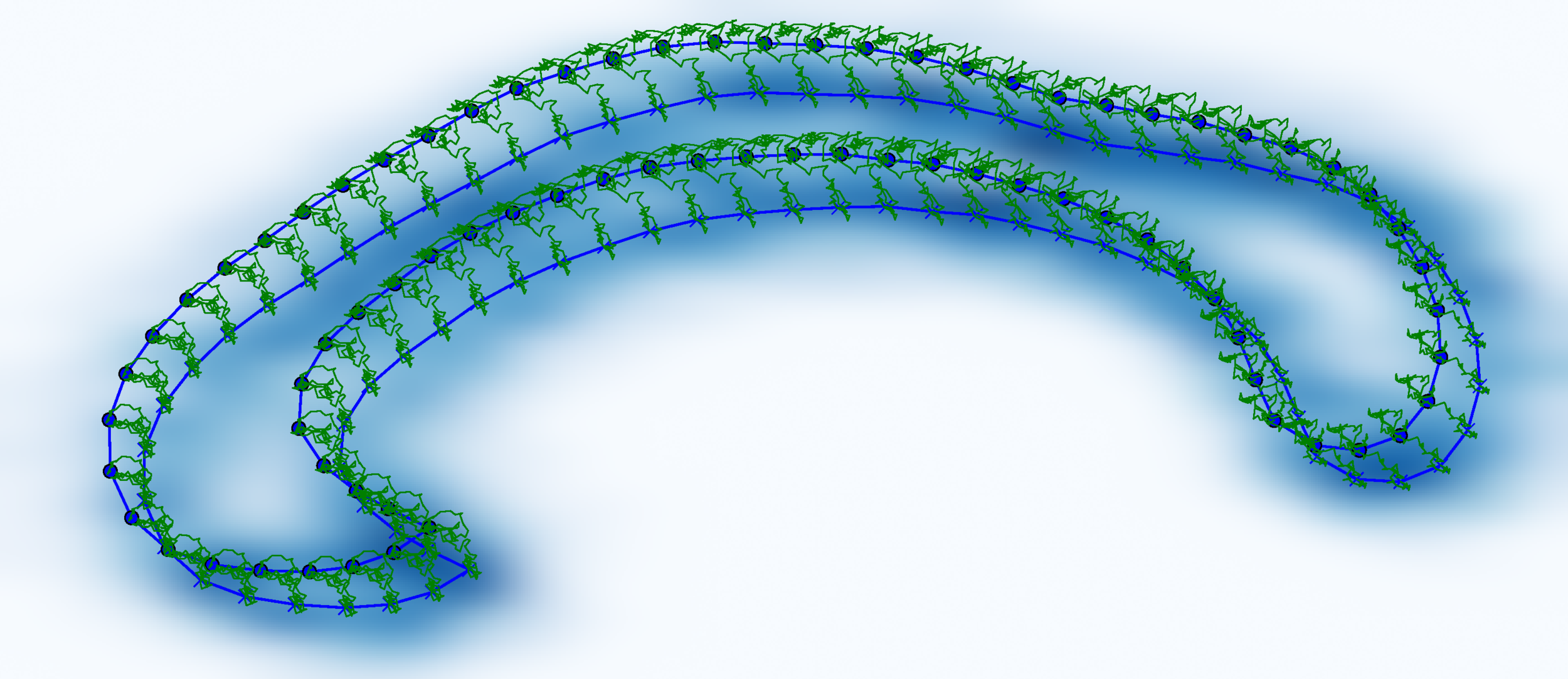
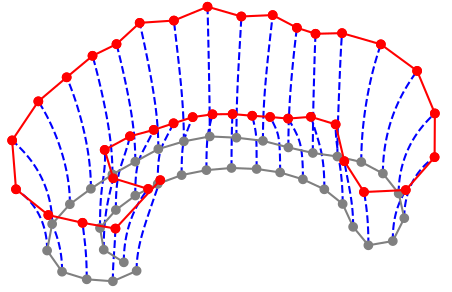
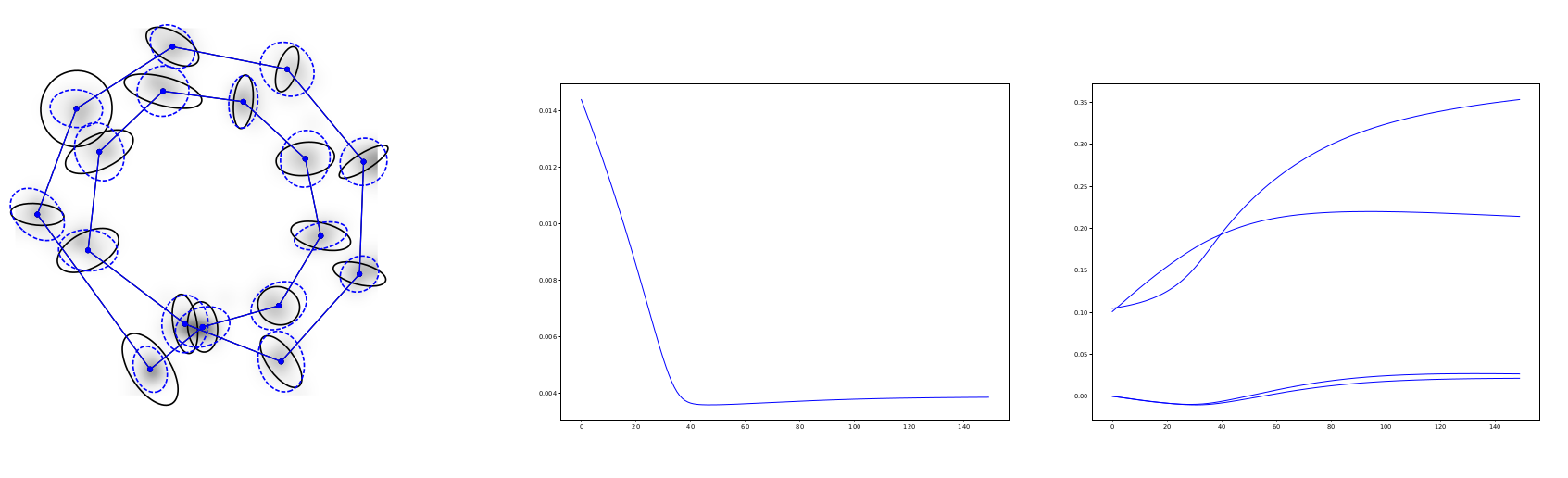
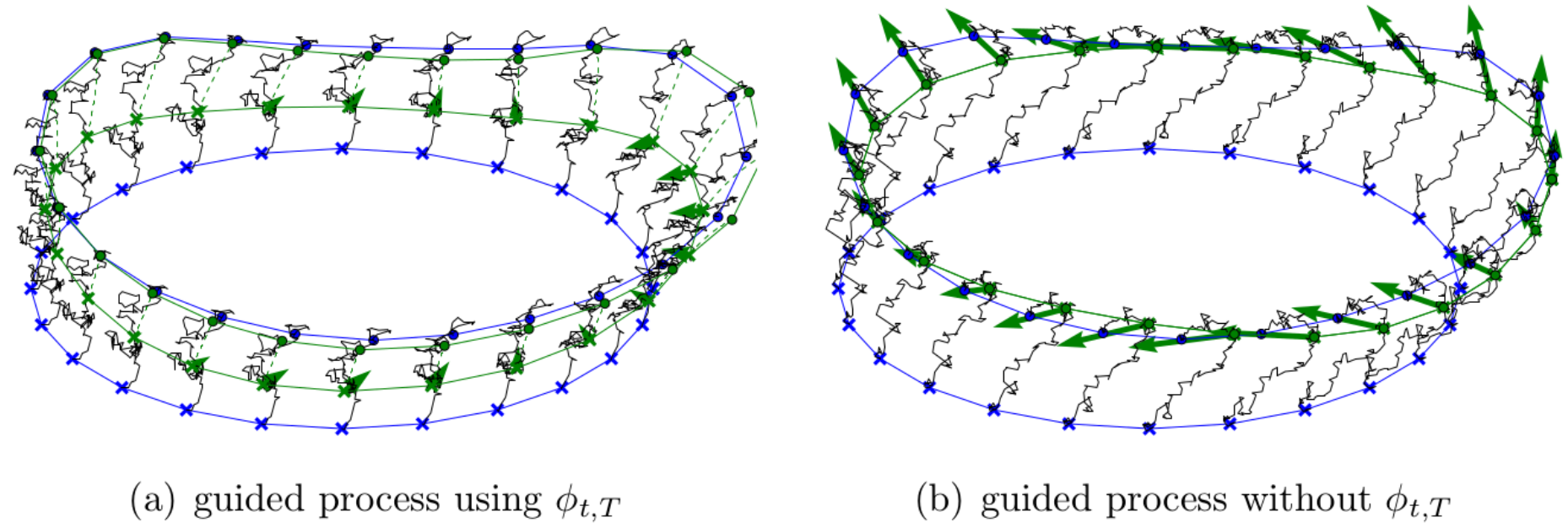
Landmark E-P bridges
- conditioning on \(\mathbf v=(v_1,\ldots,v_N)\)
- \(\phi_{t,T}\) approximates expected endpoint
- \(\Sigma\) is not invertible, using \(\Sigma_{\mathbf q}^\dagger\) pseudo-inverse
- appropriate continuity of density \(p(\mathbf q_0,\mathbf p_0; \mathbf q,T)\)
Theorem:

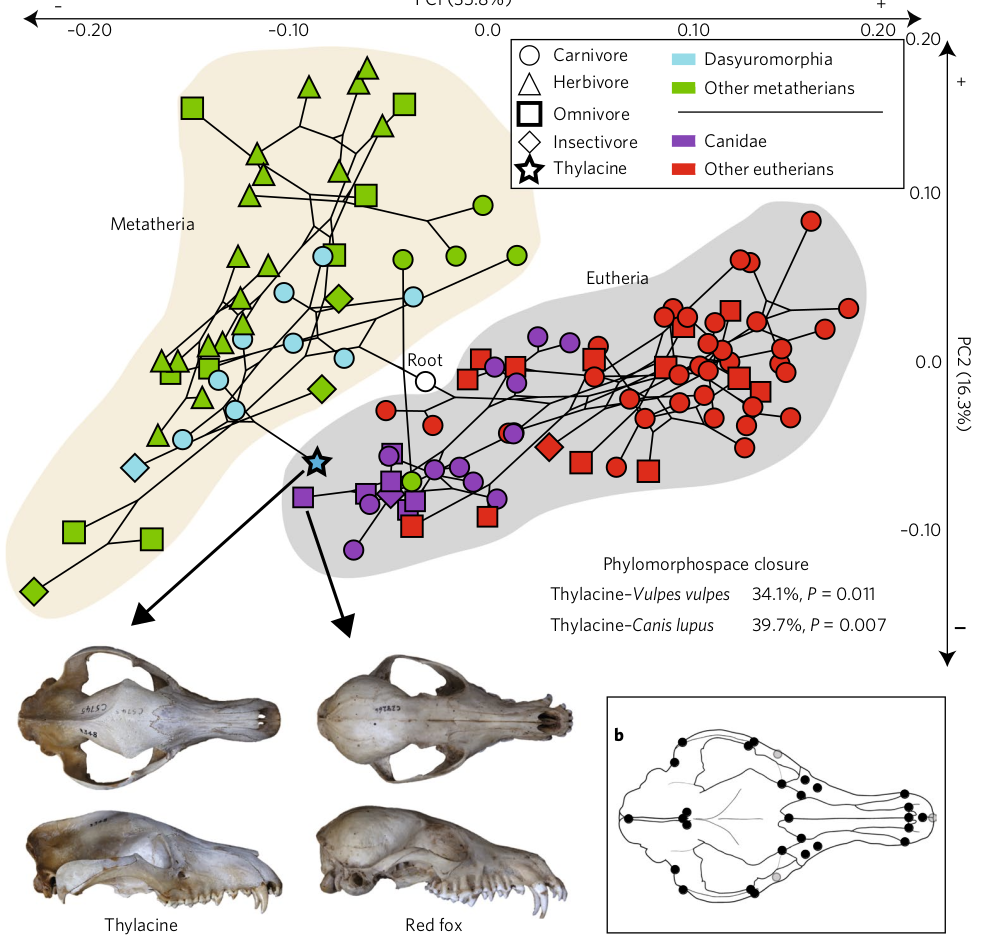
Stochastic morphometry along phylogenies
v.d. Meulen,Schauer,Arnaudon,Sommer, SIIMS 21
Simulation of Conditioned Semimartingales on Riemannian Manifolds
Jensen, Mallasto, Sommer, GSI 2019 ; Jensen, Sommer, GSI 2021; Jensen, Sommer, arxiv 2021
Stochastic forcing
perturbation of Hamiltonian system
Lagrangian coordinates
\(dq_i^\alpha=\frac{\partial H}{\partial p_i^\alpha}dt\)
\(dp_i^\alpha=-\frac{\partial H}{\partial q_i^\alpha}dt+\gamma_idW^i_t\)
\(dp_i^\alpha=-\lambda\frac{\partial H}{\partial p_i^\alpha}dt-\frac{\partial H}{\partial q_i^\alpha}dt+\gamma_idW^i_t\)
Marsland/Shardlow,SIIMS'17
Trouve,Vialard,QAM'12;Vialard,SPA'13
Schauer/v.d. Meulen bridges
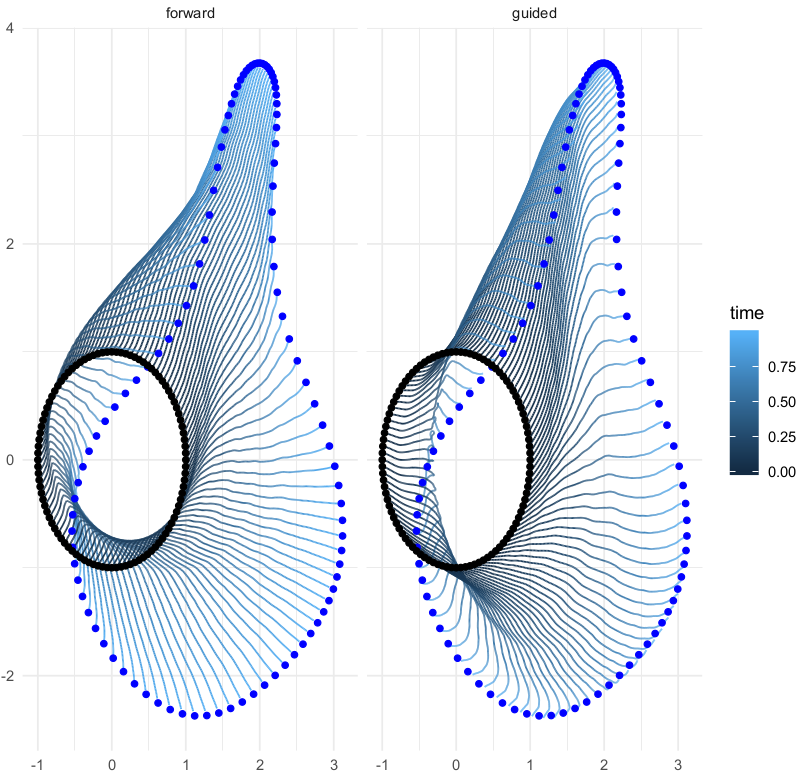
v.d. Meulen,Schauer,Arnaudon,Sommer,arxiv'21
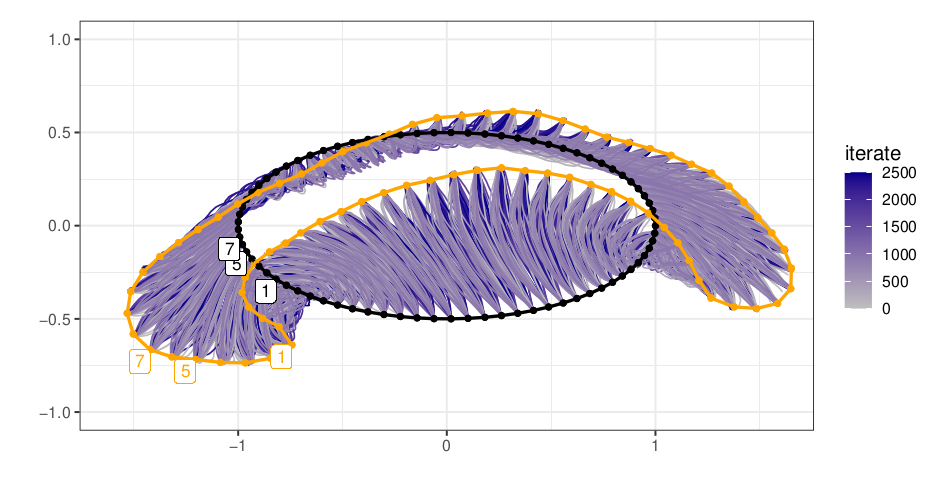
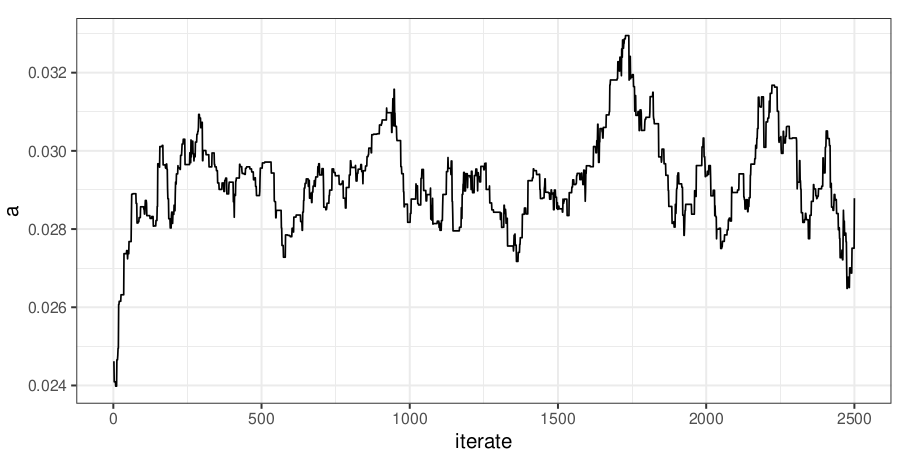
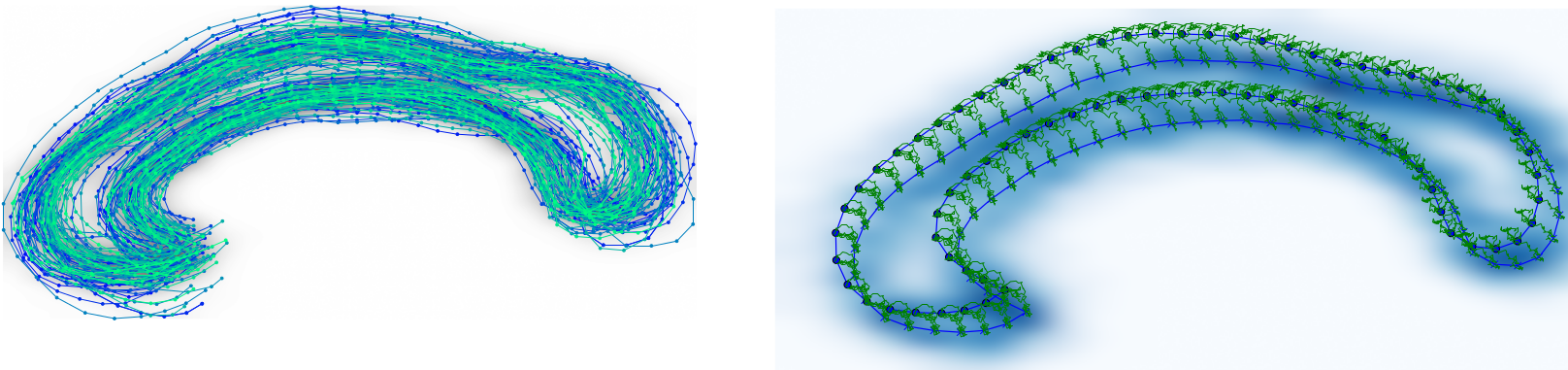
Hamiltonian kernel parameter
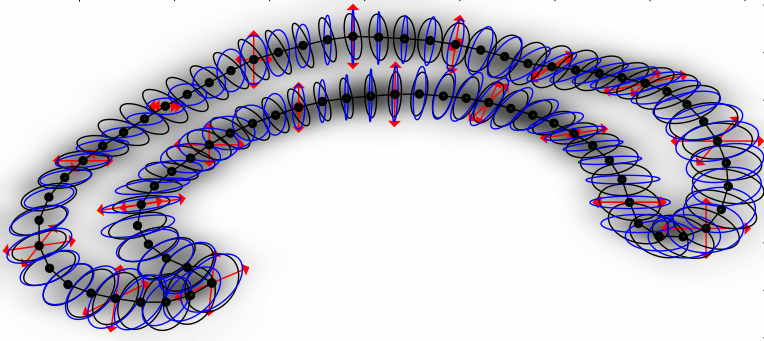
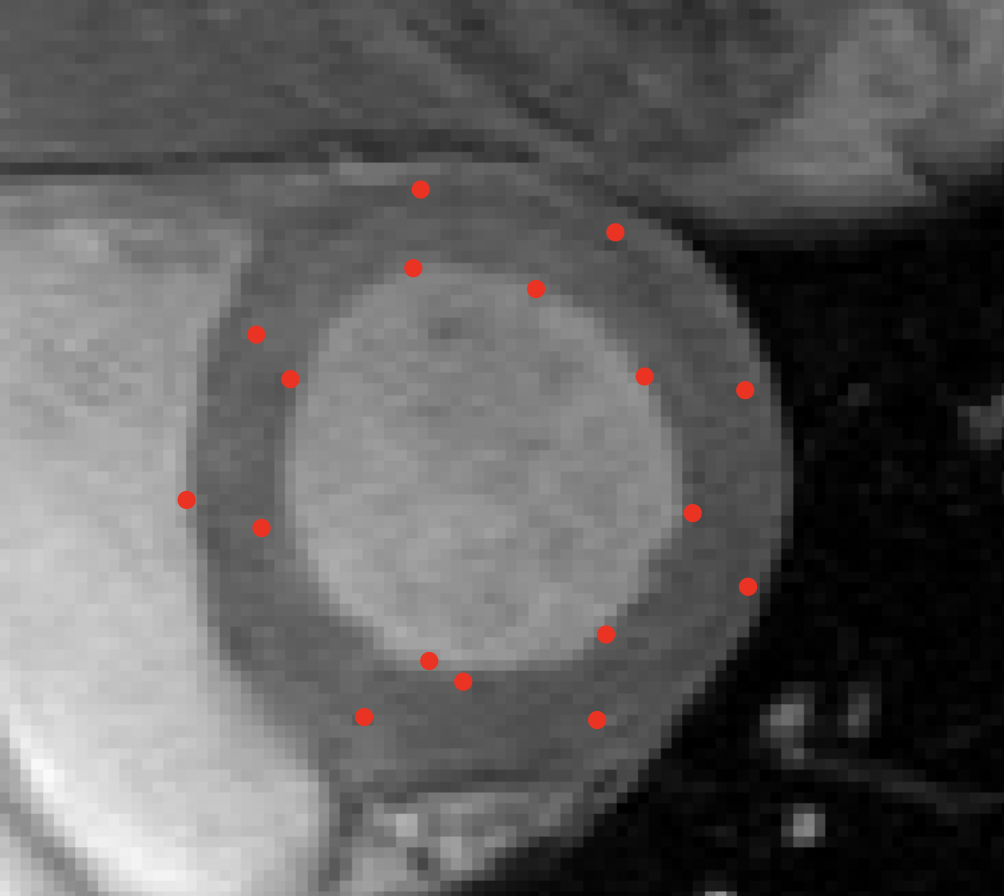
corpus callosum bridge
ventricles
- parametric families of probability distributions \(\mu_\theta\)
- likelihood from density:
\(\quad\mathcal{L}(\theta; y_1,\ldots,y_N)=\prod_{i=1}^Np_\theta(y_i)\) - ML/MAP estimates:
\(\quad\bar{\theta}=\mathrm{argmax}_\theta\mathcal{L}(\theta; y_1,\ldots,y_N)\)
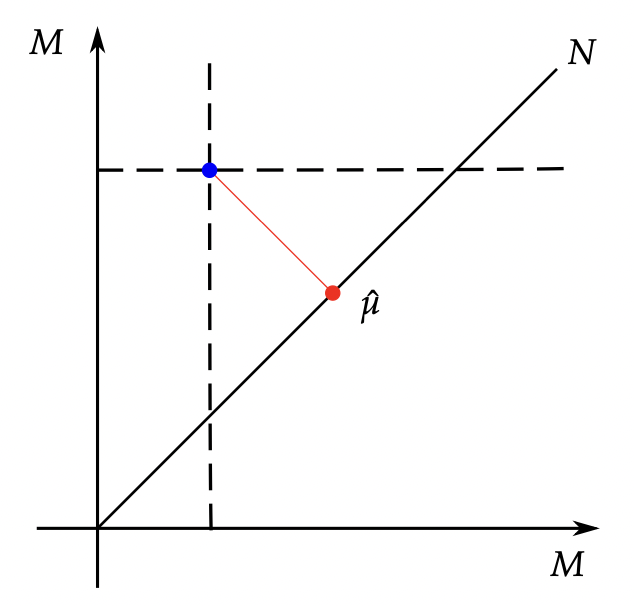
- Diffusion mean:
\(\quad x_t\in M\) Brownian motion
\(\quad\theta=x_0\) - assume \(y\sim x_T\):
\(\quad\bar{x}_{\mathrm{ML}}=\mathrm{argmax}_\theta\mathcal{L}(\theta)\)
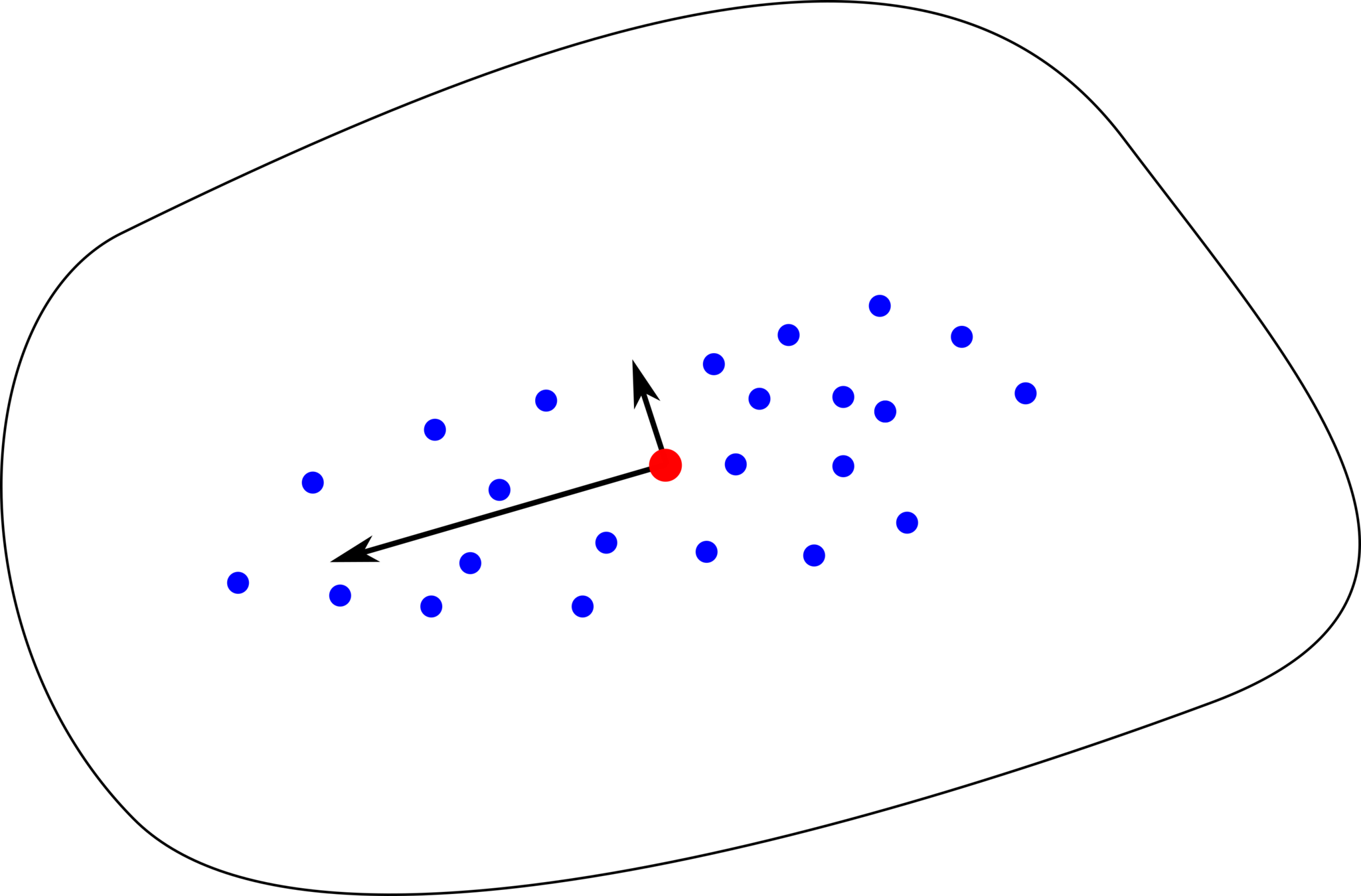
Generalization of Euclidean statistical notions and techniques.
- i.i.d. samples \(y_1,\ldots,y_N\in M\)
- Fréchet mean:
\(\bar{x}=\mathrm{argmin}_{x\in M}\sum_{i=1}^Nd(x,y_i)^2\)
Nye, White, JMIV'14;
Sommer,IPMI'15; Sommer,Svane,JGM'15;
Hansen,Eltzner,Huckemann,Sommer,GSI'21,'21
Geometric statistics
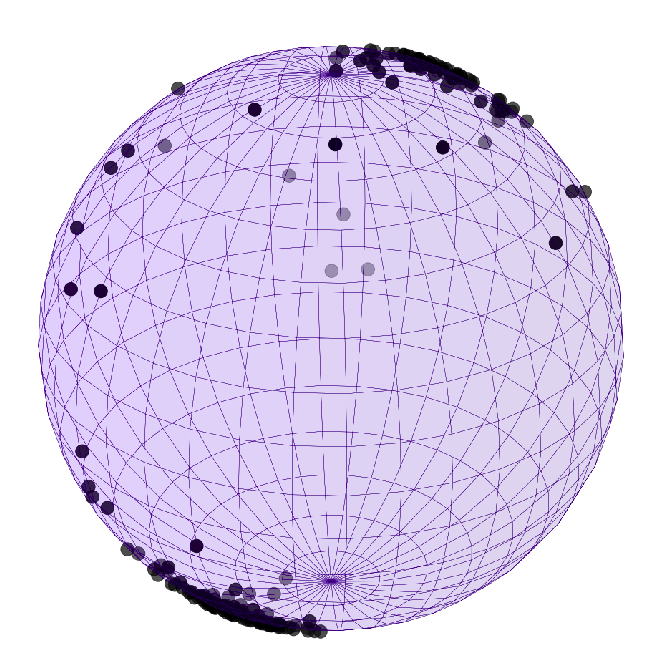
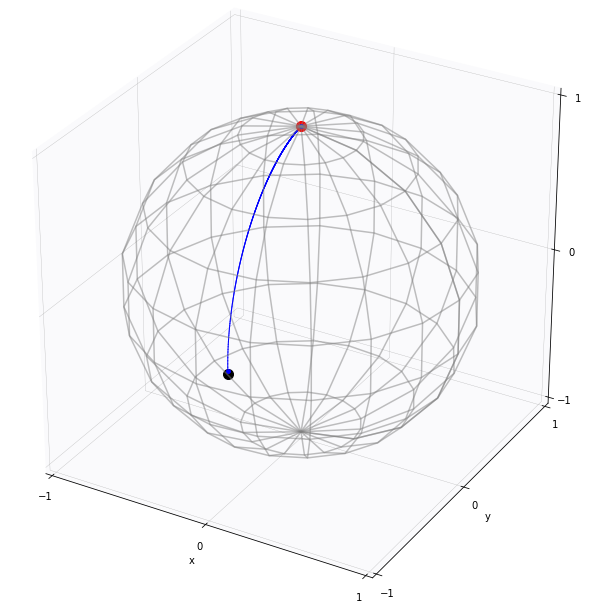
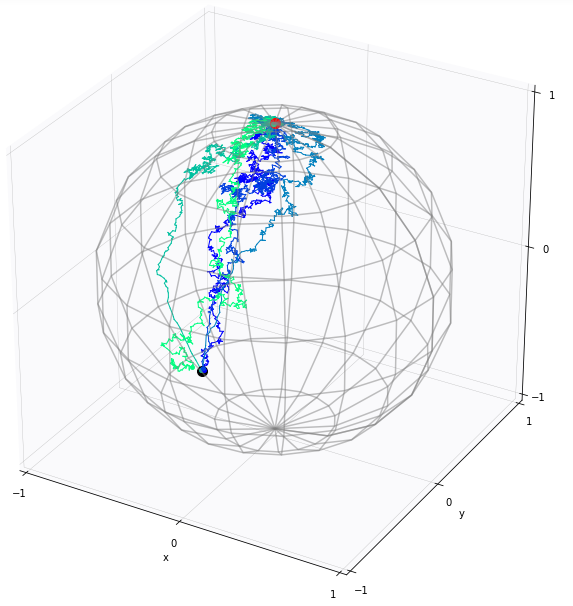
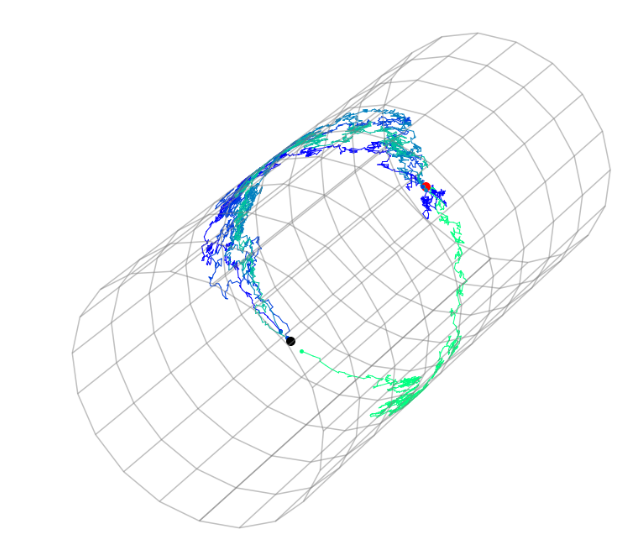
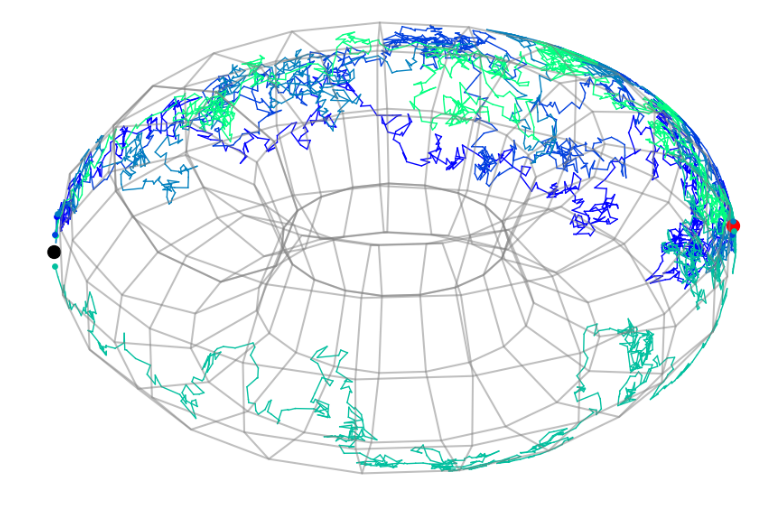
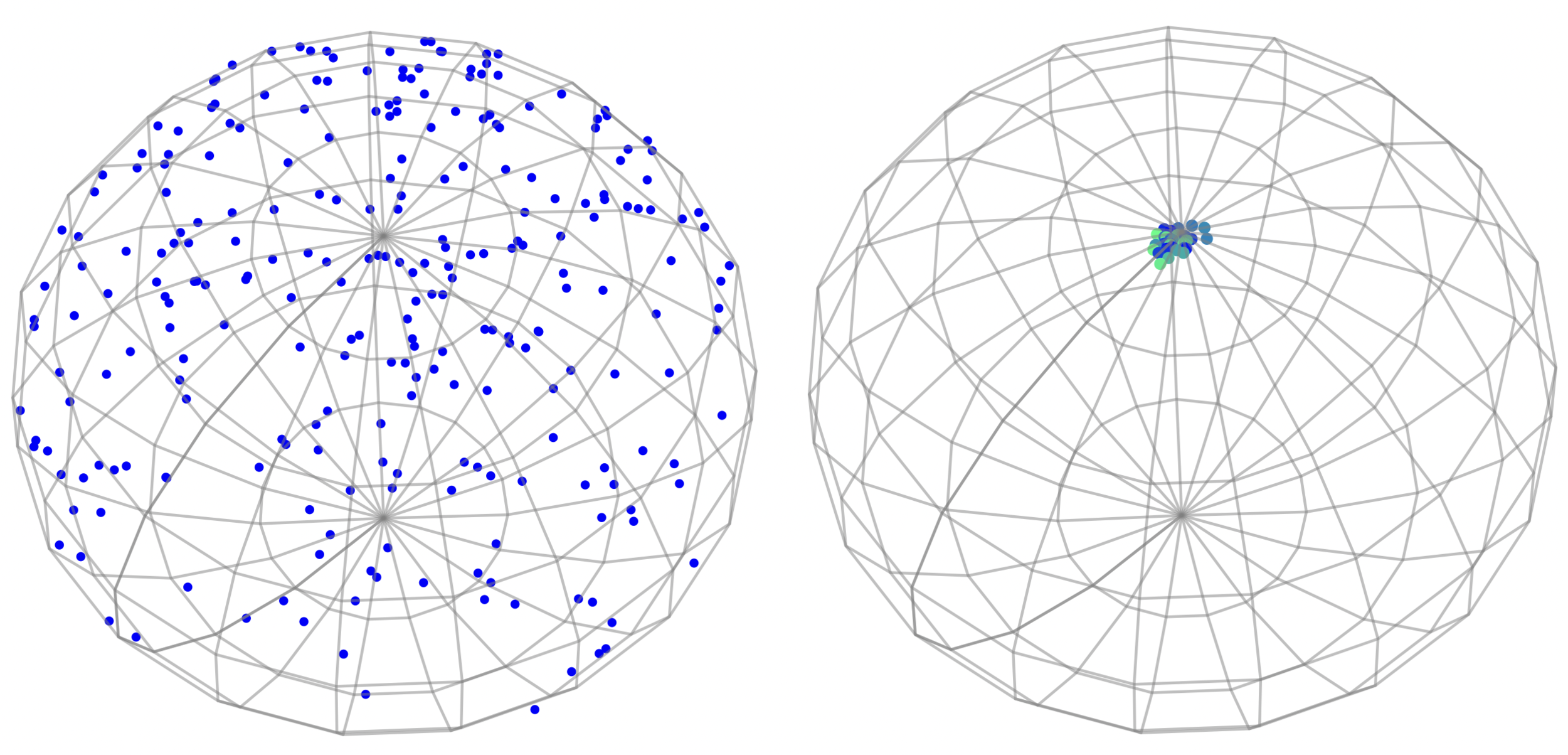
Diffusion mean on \(\mathbb S^2\)
- \(x_t\in M\) Brownian motion
- \(\theta=x_0\), \(y\sim x_T\)
- \(\bar{x}_{\mathrm{ML}}=\mathrm{argmax}_\theta\mathcal{L}(\theta)\)
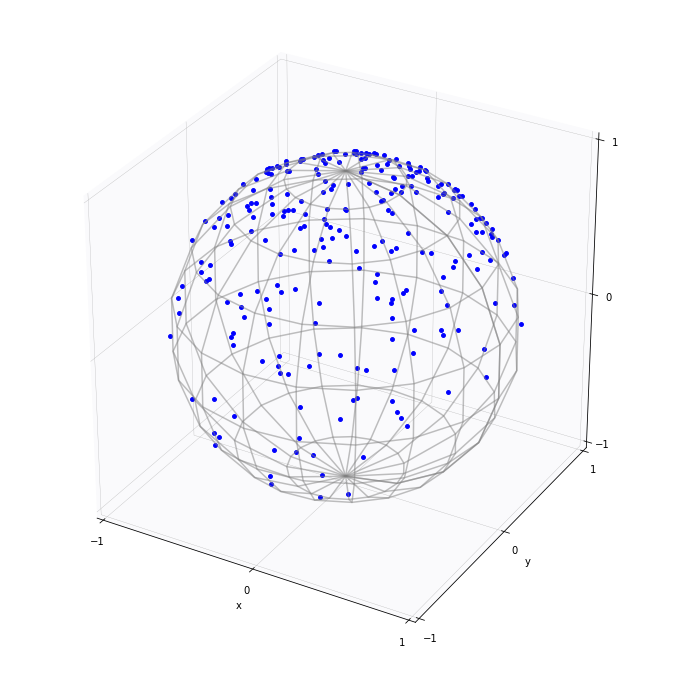
Brownian motion starting point
Sampling means
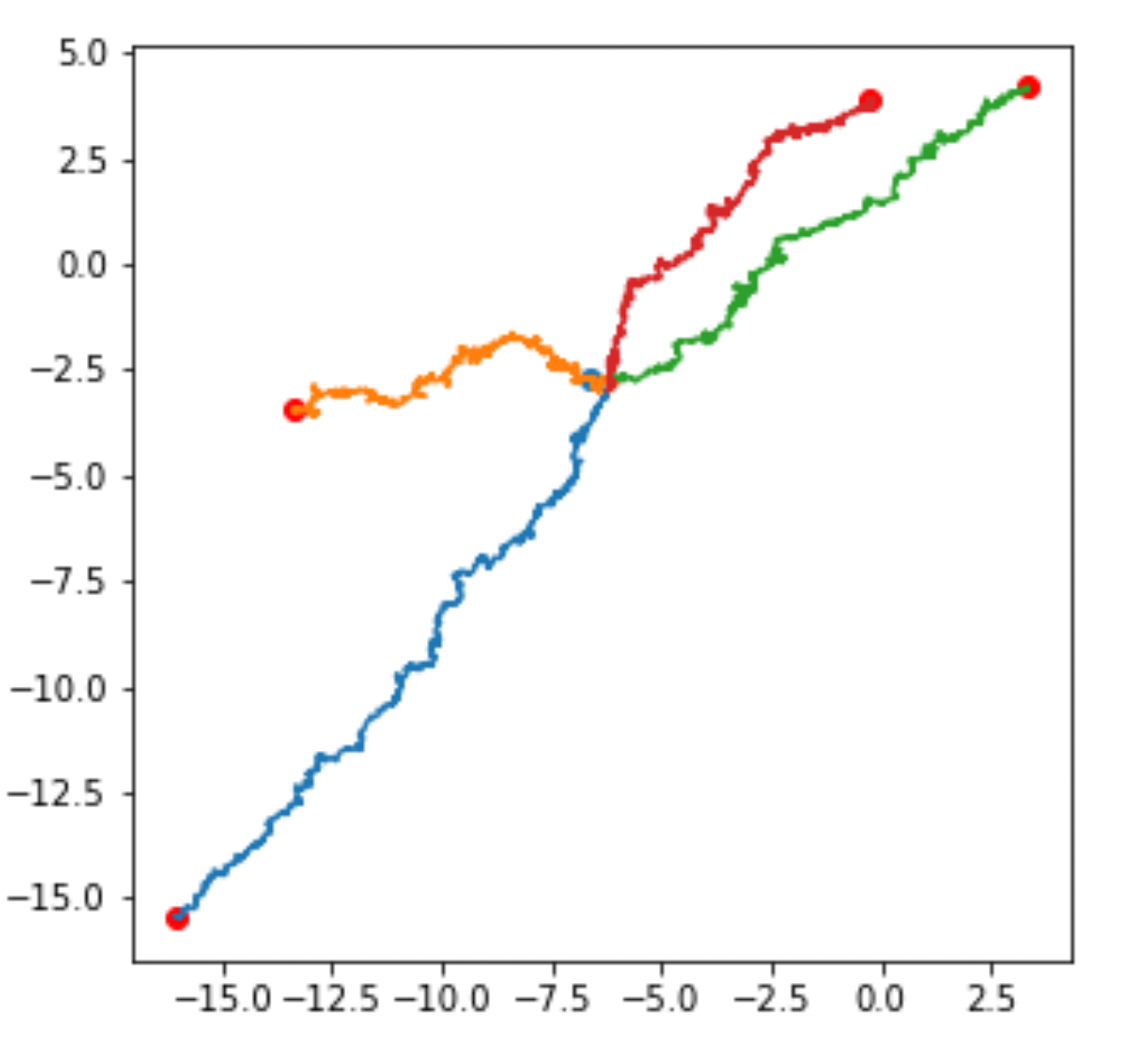
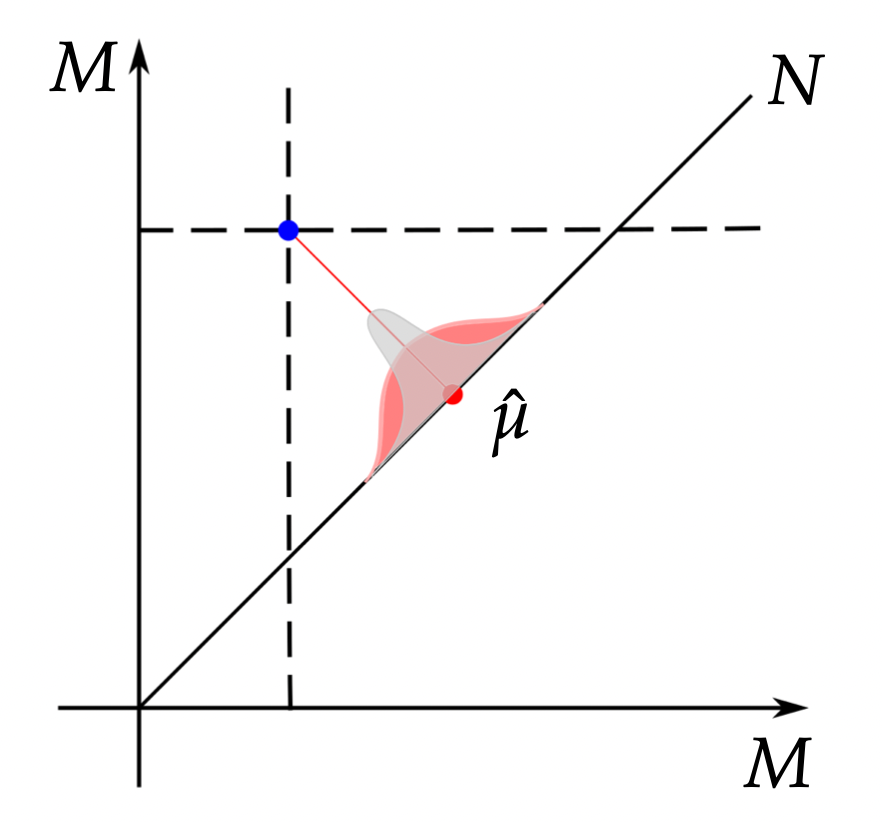
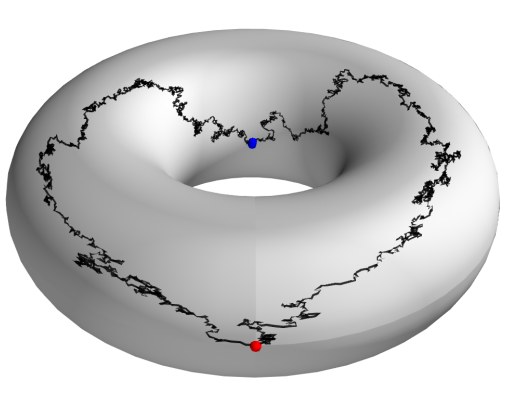
Diagonally conditioned distribution

Sommer, Bronstein, TPAMI 2021; Jensen, Sommer, Algorithms 2022
Fast mean estimation

Fermi bridge:
Coordinate bridge:
One (or few) forward samples - compared to nested optimization
Added variance on top of CLT - gain in computational speed

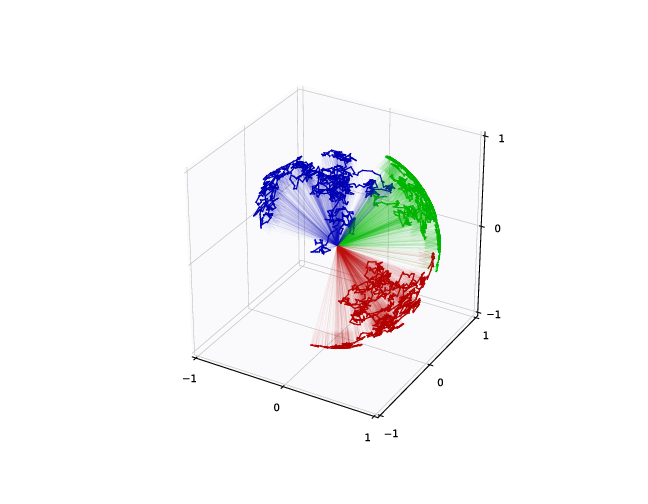
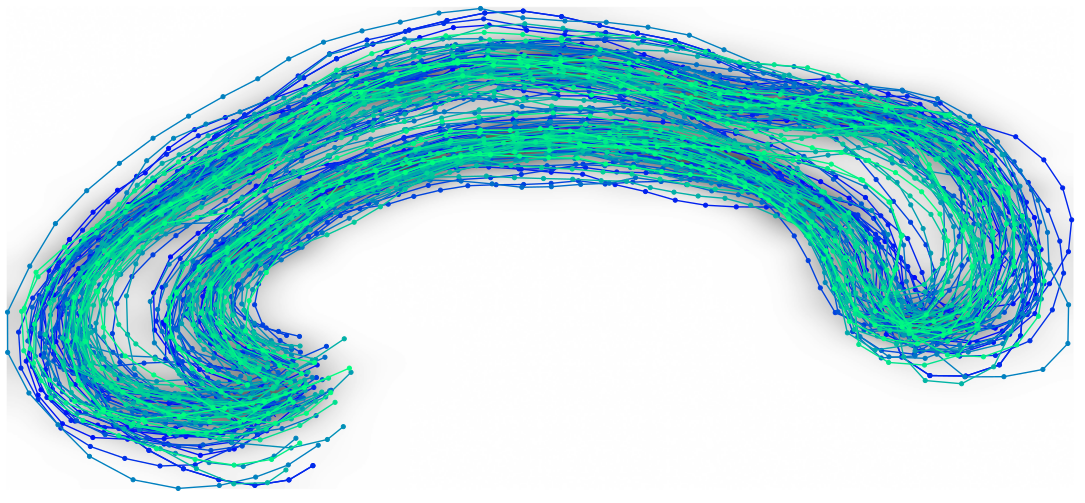
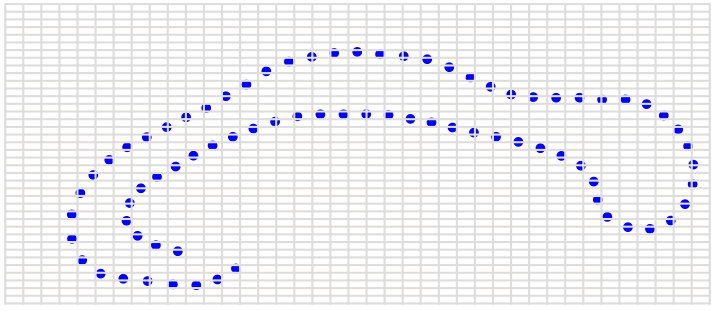
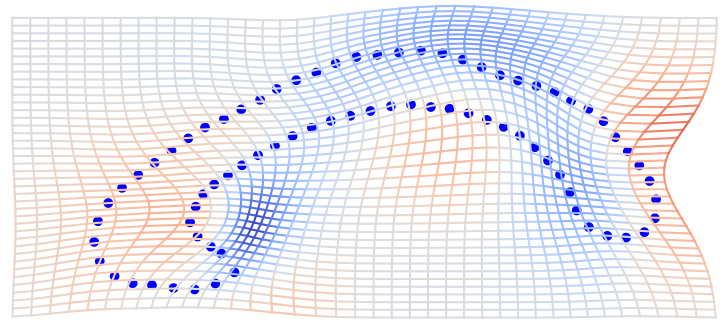
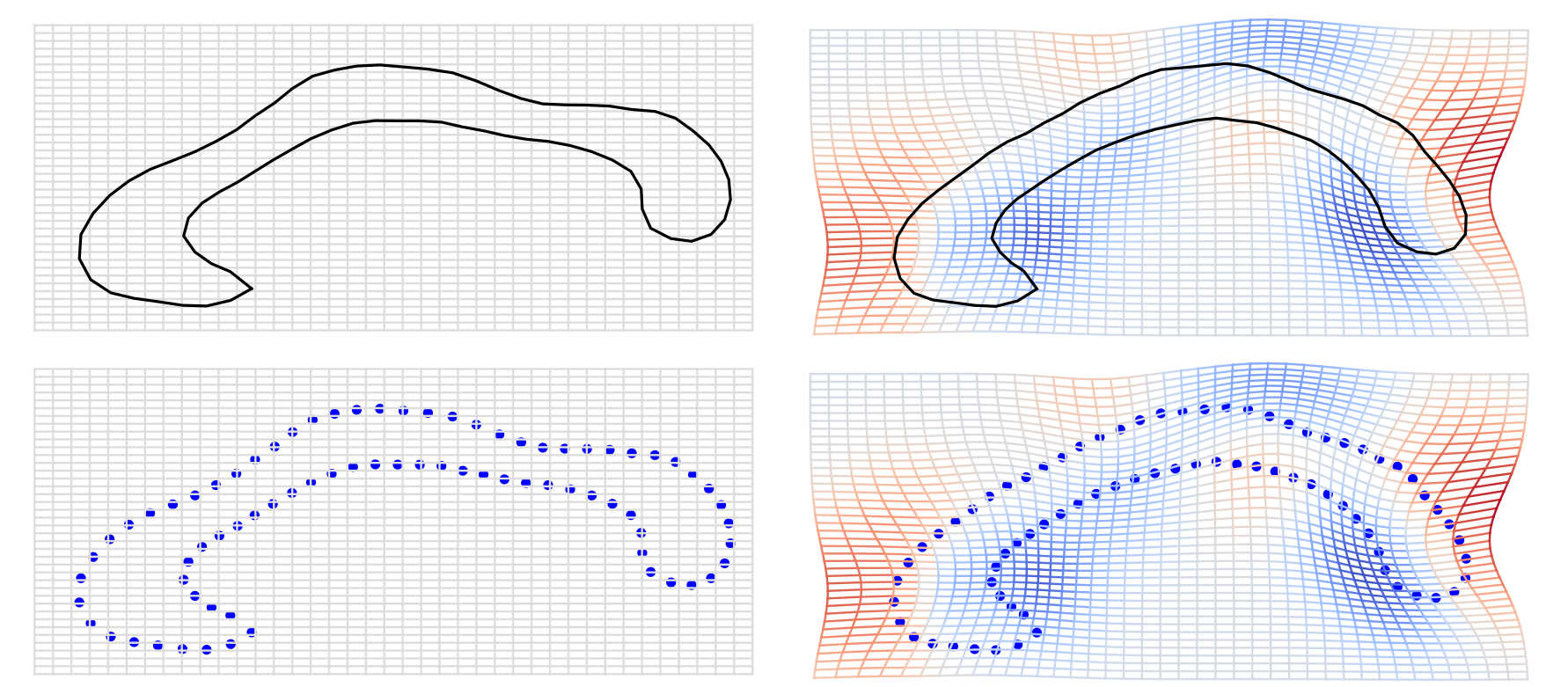
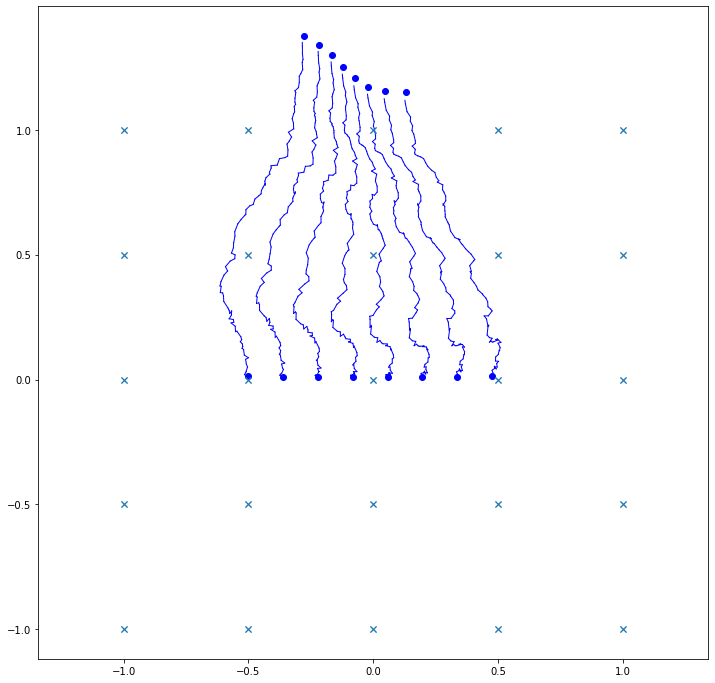
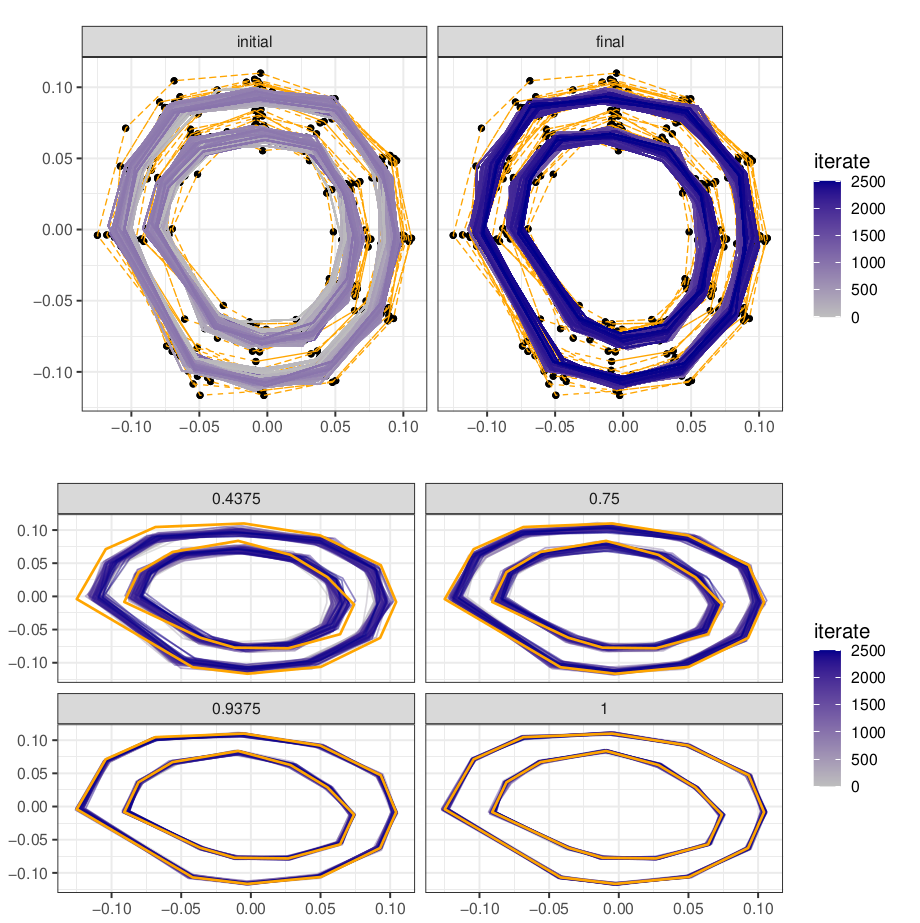
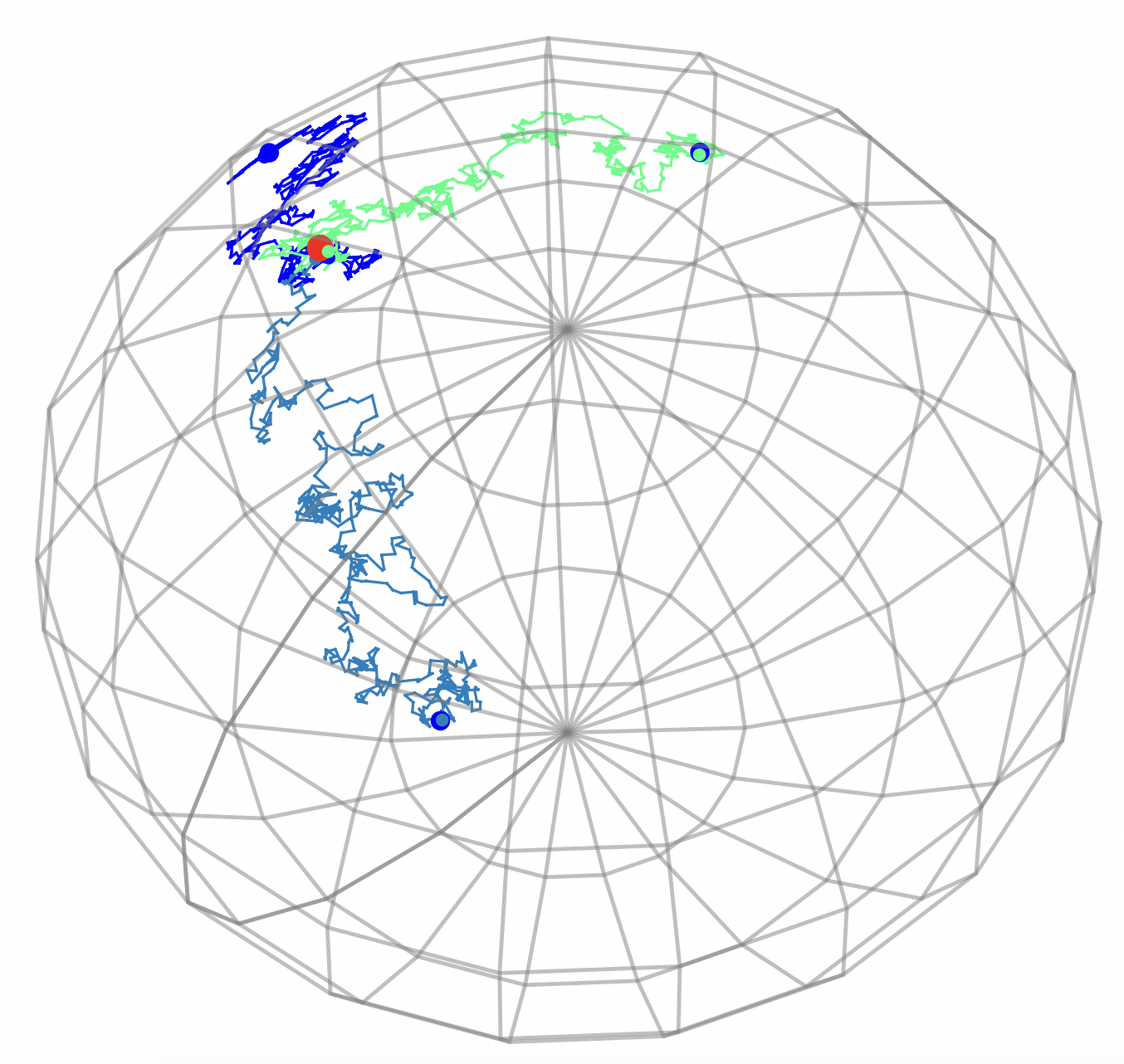
Sampled landmark means
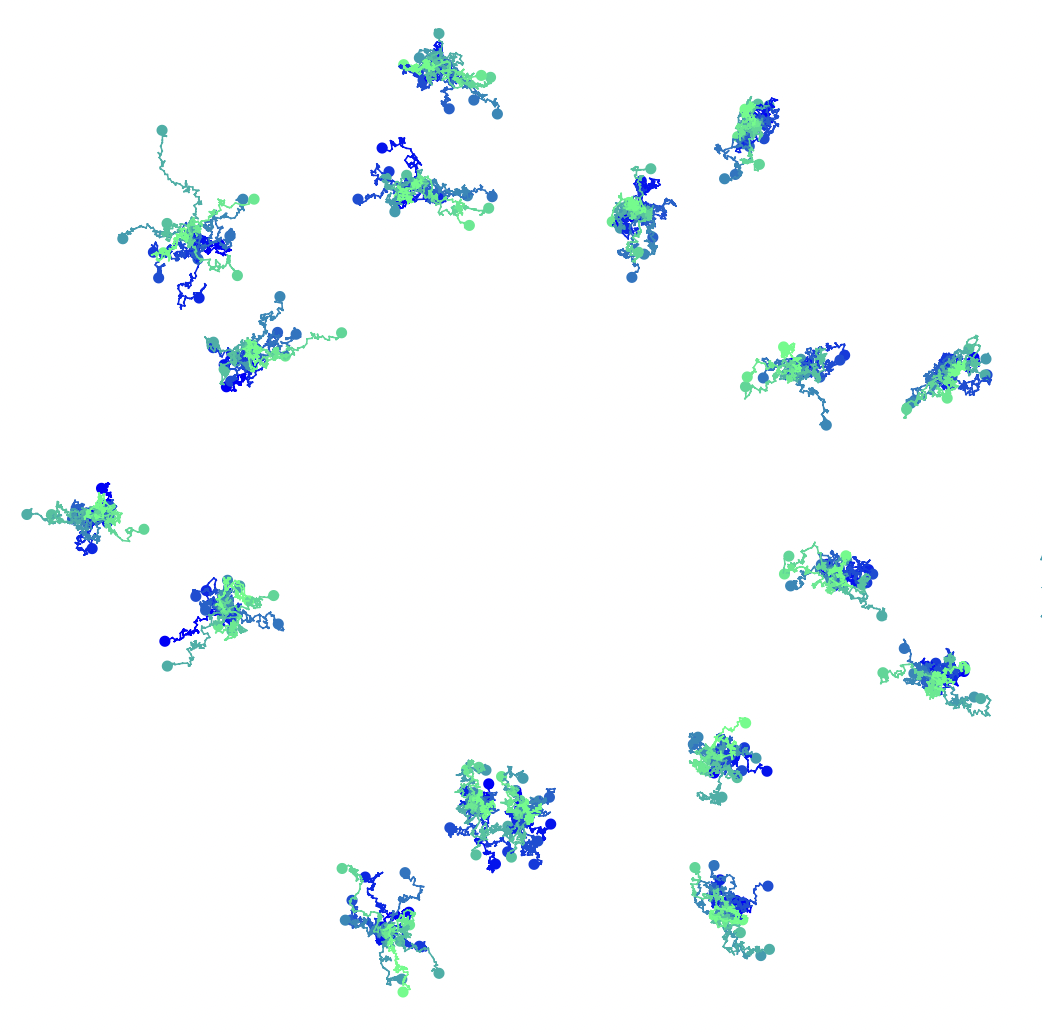
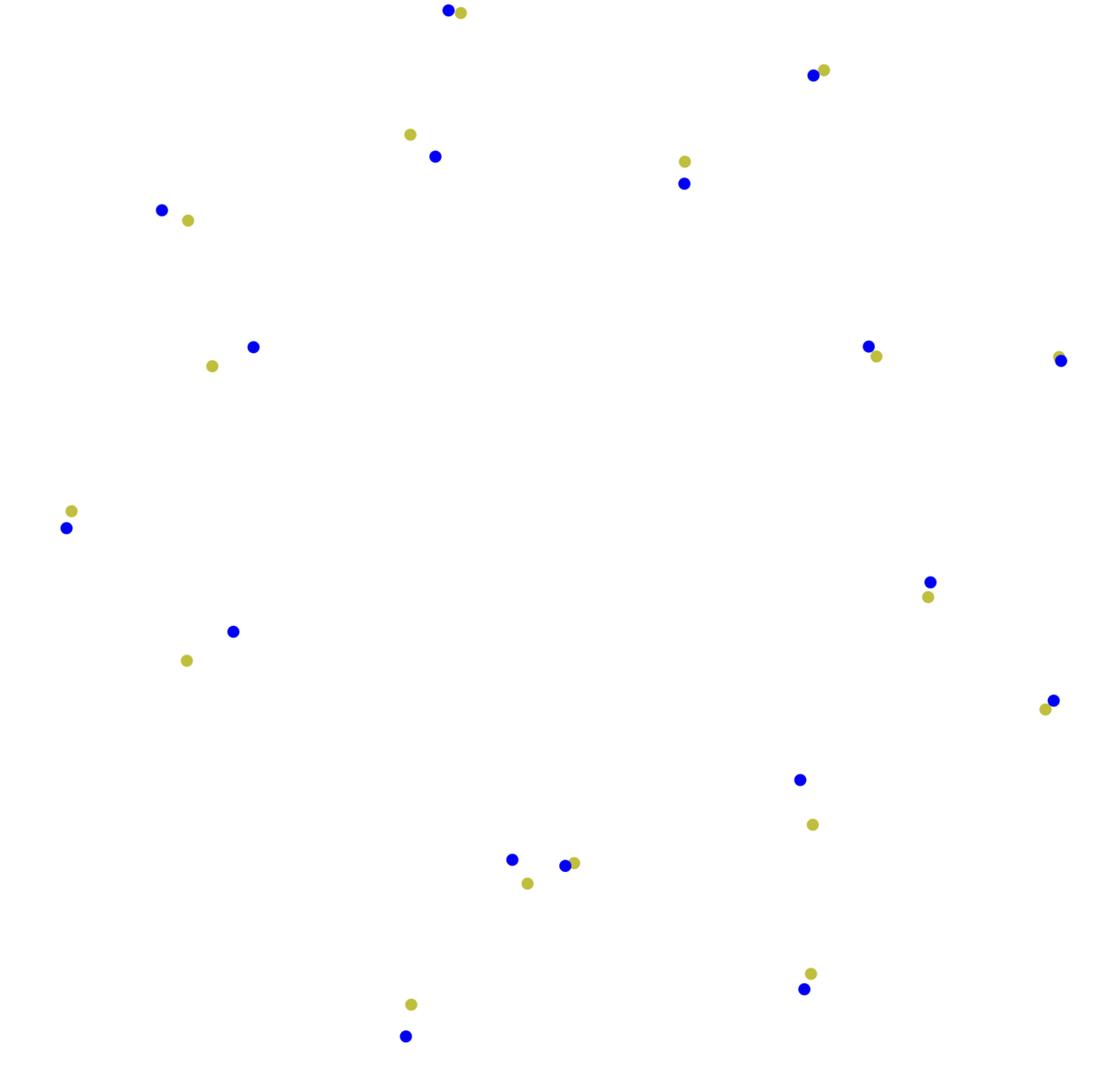
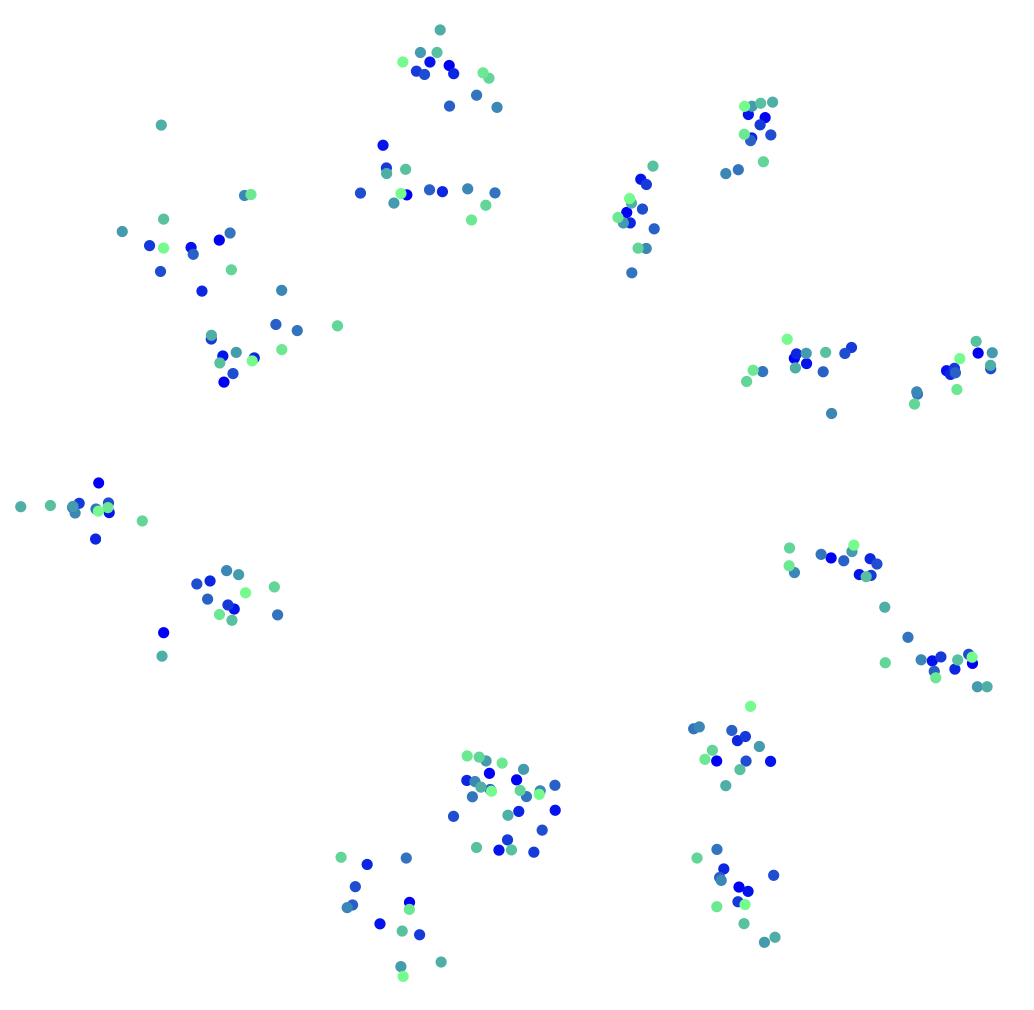
Diagonally conditioned process:
Frechet mean (green), diffusion mean (blue)
Shape stochastics, bridges, mean sampling
code: http://bitbucket.com/stefansommer/jaxgeometry
slides: https://slides.com/stefansommer
References:
- Jensen, Sommer: Mean Estimation on the Diagonal of Product Manifolds, Algorithms, 2022, https://www.mdpi.com/1999-4893/15/3/92
- Arnaudon, v.d. Meulen, Schauer, Sommer: Diffusion bridges for stochastic Hamiltonian systems and shape evolutions, SIIM, 2022, arXiv:2002.00885
- Hansen, Eltzner, Huckemann, Sommer: Diffusion Means in Geometric Spaces, 2021, arXiv:2105.12061.
- Hansen, Eltzner, Sommer: Diffusion Means and Heat Kernel on Manifolds, 2021, arXiv:2103.00588.
- Højgaard Jensen, Sommer: Simulation of Conditioned Diffusions on Riemannian Manifolds, 2021, arXiv:2105.13190.
- Højgaard, Joshi, Sommer: Brownian Bridge Simulation and Metric Estimation on Lie Groups and Homogeneous Spaces,
- Sommer, Bronstein: Horizontal Flows and Manifold Stochastics in Geometric Deep Learning, TPAMI, 2020, doi: 10.1109/TPAMI.2020.2994507
- Arnaudon, Holm, Sommer: A Geometric Framework for Stochastic Shape Analysis, Foundations of Computational Mathematics, 2019, arXiv:1703.09971.
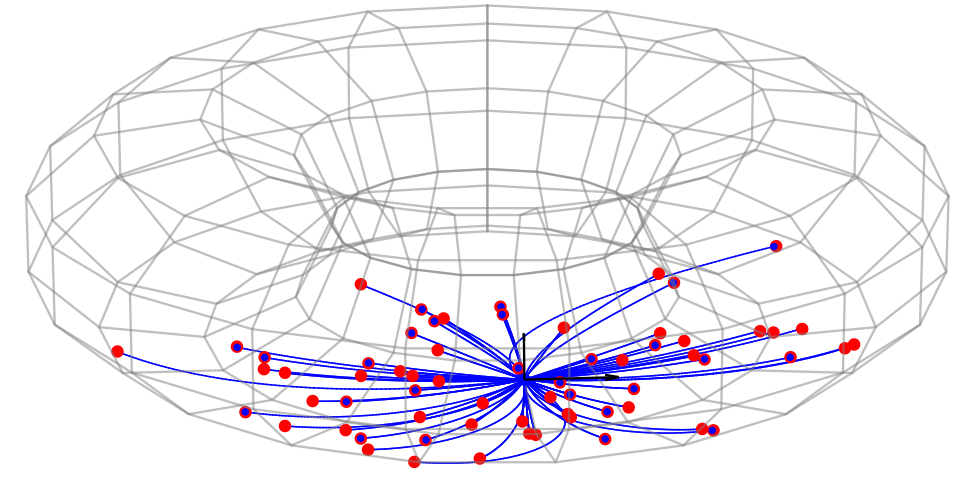
- Højgaard Jensen, Mallasto, Sommer: Simulation of Conditioned Diffusions on the Flat Torus, GSI 2019., arXiv:1906.09813.
- Sommer, Svane: Modelling Anisotropic Covariance using Stochastic Development and Sub-Riemannian Frame Bundle Geometry, JoGM, 2017, arXiv:1512.08544.
- Sommer: Anisotropically Weighted and Nonholonomically Constrained Evolutions, Entropy, 2017, arXiv:1609.00395 .
- Sommer, Svane: Modelling Anisotropic Covariance using Stochastic Development and Sub-Riemannian Frame Bundle Geometry, JoGM, 2017, arXiv:1512.08544.
- Sommer: Anisotropically Weighted and Nonholonomically Constrained Evolutions, Entropy, 2017, arXiv:1609.00395 .
- Arnaudon, Holm, Sommer: A Stochastic Large Deformation Model for Computational Anatomy, IPMI 2017, arXiv:1612.05323.
- Sommer: Anisotropic Distributions on Manifolds: Template Estimation and Most Probable Paths, IPMI 2015, doi: 10.1007/978-3-319-19992-4_15.
Open phd/pd positions on shape stochastics and morphometry