SamBuCa & RobotFramework
Sylvain Fargier
03/07/23

About RobotFramework
Resolver simple motion
[Documentation] ensure resolver is reporting proper position
[Tags] hardware:8-axis-no-mechanics
[Setup] I prepare the test-bench for resolvers
${travel_resolution} = I get "Z-axis travel resolution" setting
When I move axis "Z" to "-10"
And I wait for state to be "Idle"
${steps} = Evaluate -10 * ${travel_resolution}
Then The driver "Z" position is "${steps}" steps
And The resolver "Z" position is about "${steps}" steps-
Using VSCode RF Language Server plugin
- Code completion and inline documentation
- Test linting, refactoring, formatting
Functional tests development
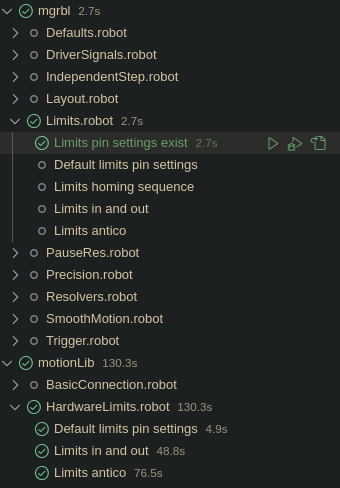
VSCode tests tree view
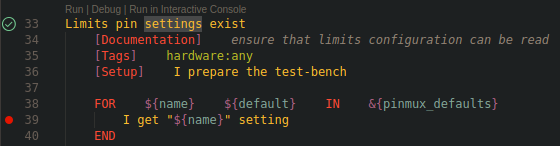
VSCode tests editor
-
The VSCode plugin also integrates:
- A test Runner with live-reports and logs
- A debugger (for Python and BDD)
- Tools for linting, refactoring, formatting tests
Functional tests development
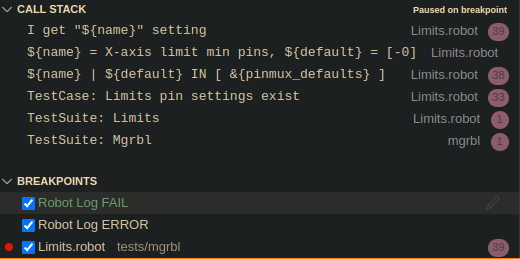
VSCode test debugging
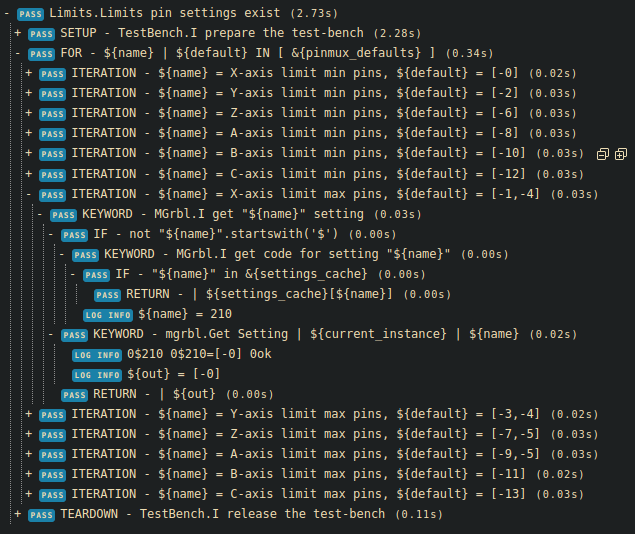
VSCode tests live-report
-
A set of tools and libraries (GitLab) :
- Expect and ExpectBDD : Unix "expect" style wrapper
- Shell and ShellBDD : Shell wrappers, based on expect
- Sigrok and SigrokBDD : sigrok logical-analyzer wrapper
-
EdgeConsole and EdgeConsoleBDD : Edge wrappers, using edge-console and Shell
- EdgeConsoleFifo : a plugin to connect an Expect-like object with an Edge FIFO
-
ExtendedLogging : utilities for intensive and characterization tests
- Some tests can run for days, generating tons of logs, this library will silent useless logs when iterating loops (unless firsts/last iterations).
MRO rfw-tester library
-
SamBuCa functional tests code-base (GitLab) :
- Device specific resources : Grbl, MGrbl, motionLibServer ...
- Test cases :
- Foreseen evolutions :
- FESA level testing (adding rda-get/subscribe wrapper)
- Siemens/Snap7 integration with bench features
MRO SamBuCa tests
Demo ?