

Robot Locomotion Group
Redundancy-aware Action Spaces for Robot Learning
Reading Group Presentation by Thomas Cohn
RLG Short Talk - September 12, 2025
Pietro Mazzaglia, Nicholas Backshall, Xiao Ma, Stephen James
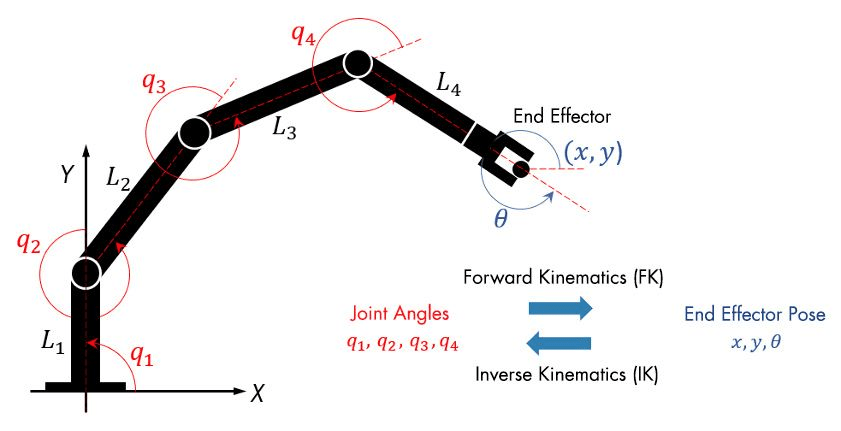
Action Spaces in Manipulation
Joint Angles vs End-Effector Pose
https://www.mathworks.com/discovery/inverse-kinematics.html
Joint Angles
+ Directly maps to robot state
+ Conservative (as a vector field)
- Actions may appear more complex
- Policies are unique to a specific robot
End-Effector Pose
- Need to solve IK to get robot state
- Not conservative (as a vector field)
+ Actions may appear simpler
+ Better potential for cross-embodiment
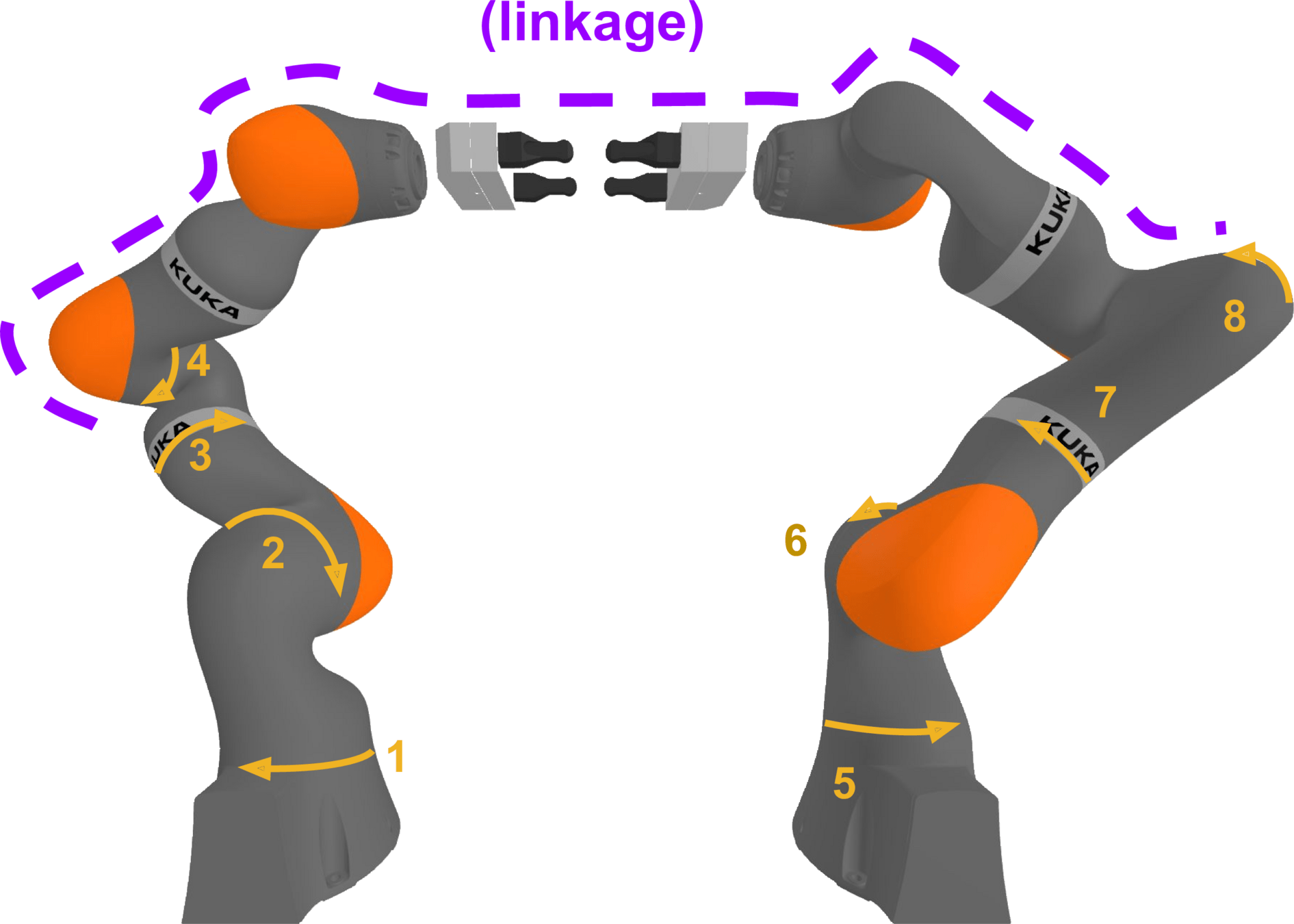
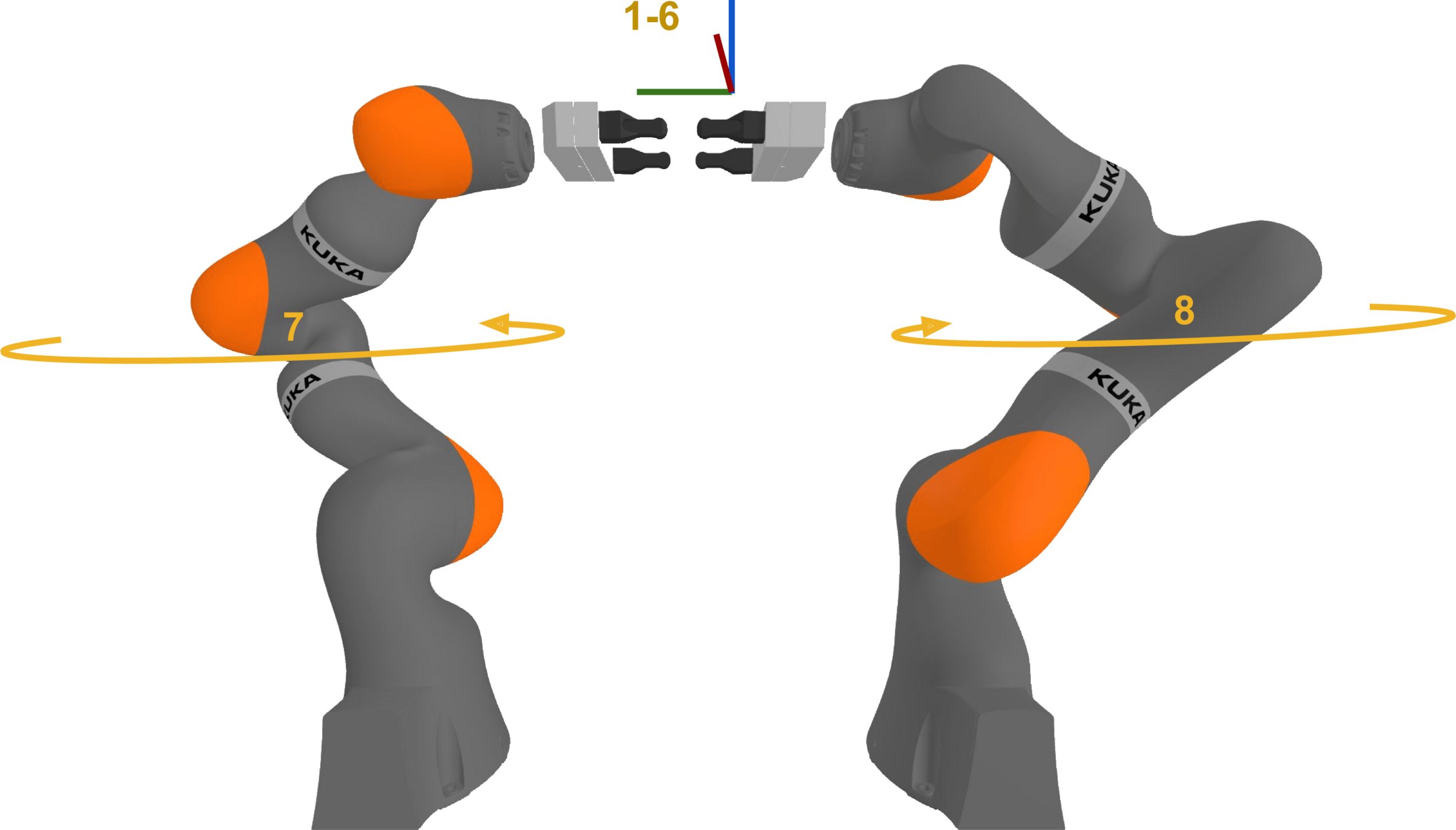
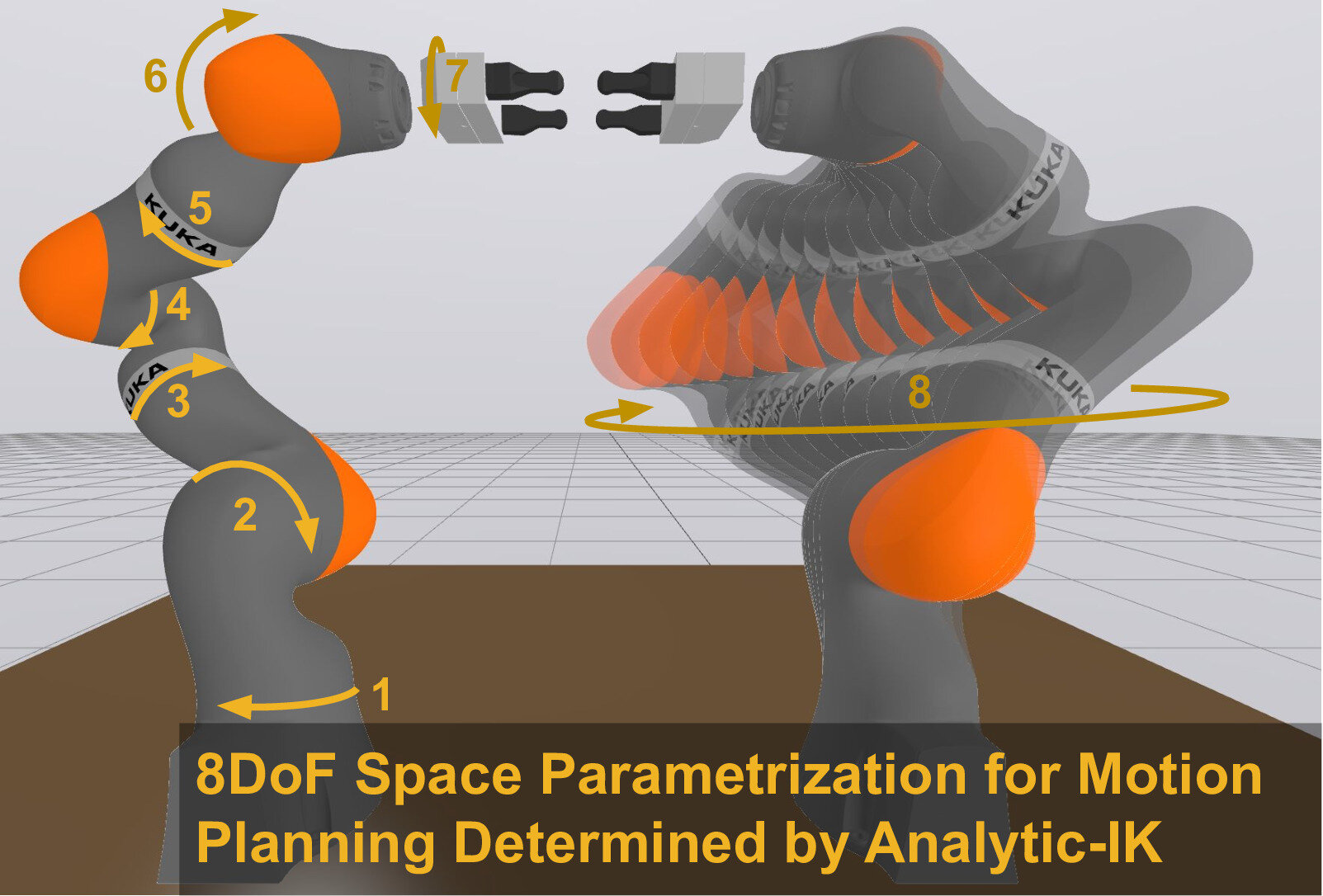
End-effector Redundancy Action Spaces
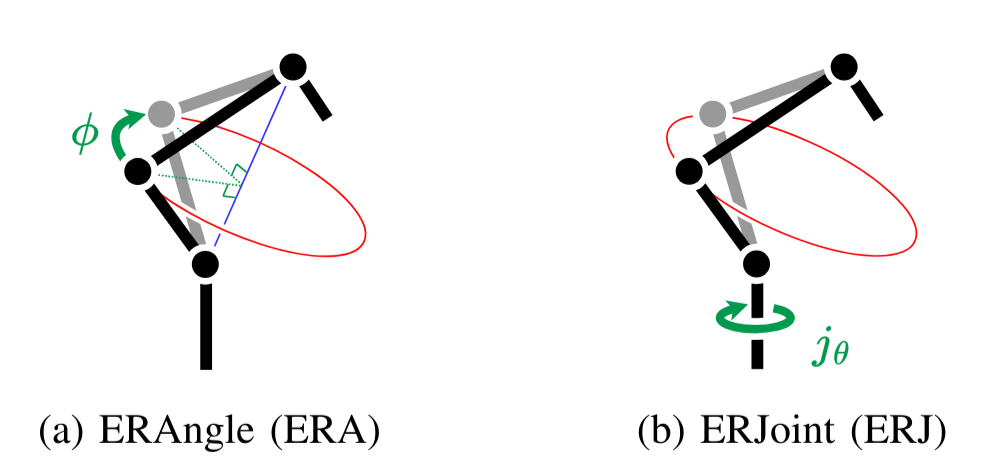
Redundancy-aware Action Spaces for Robot Learning, Mazzaglia, Backshall, Ma, James
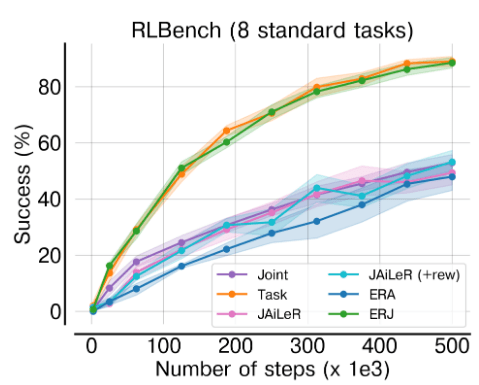
Results: RLBench
Redundancy-aware Action Spaces for Robot Learning, Mazzaglia, Backshall, Ma, James
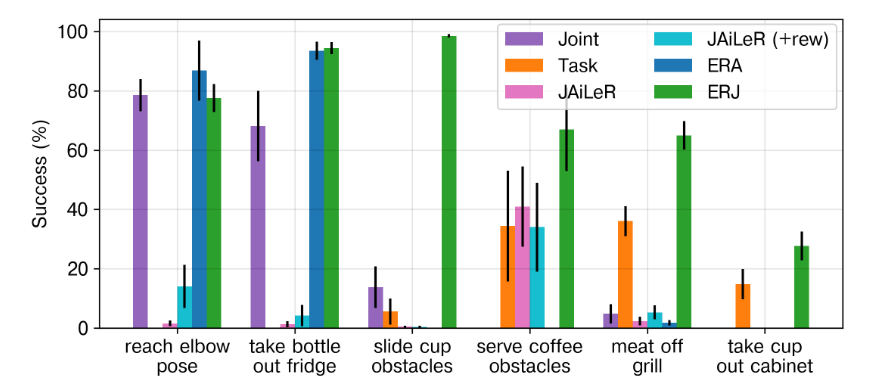
Results: Specialized Tasks
Redundancy-aware Action Spaces for Robot Learning, Mazzaglia, Backshall, Ma, James
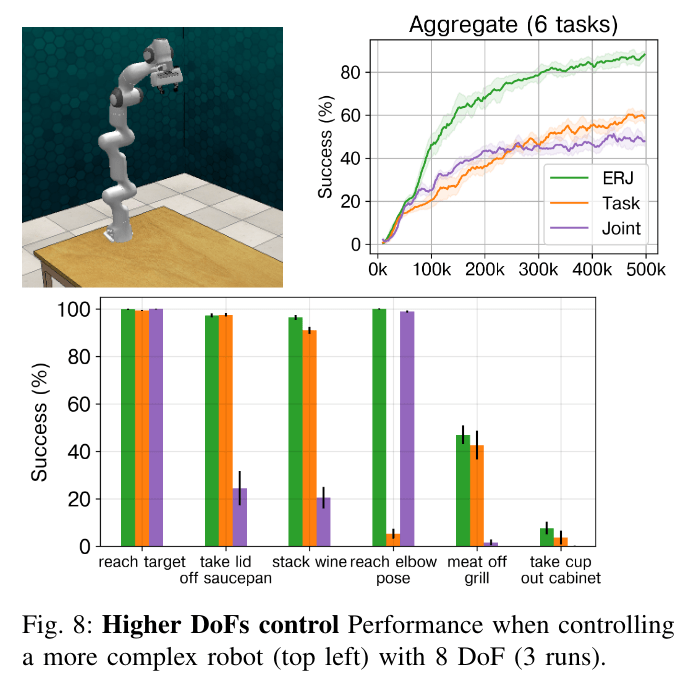
Results: Scaling with #DoF
Redundancy-aware Action Spaces for Robot Learning, Mazzaglia, Backshall, Ma, James
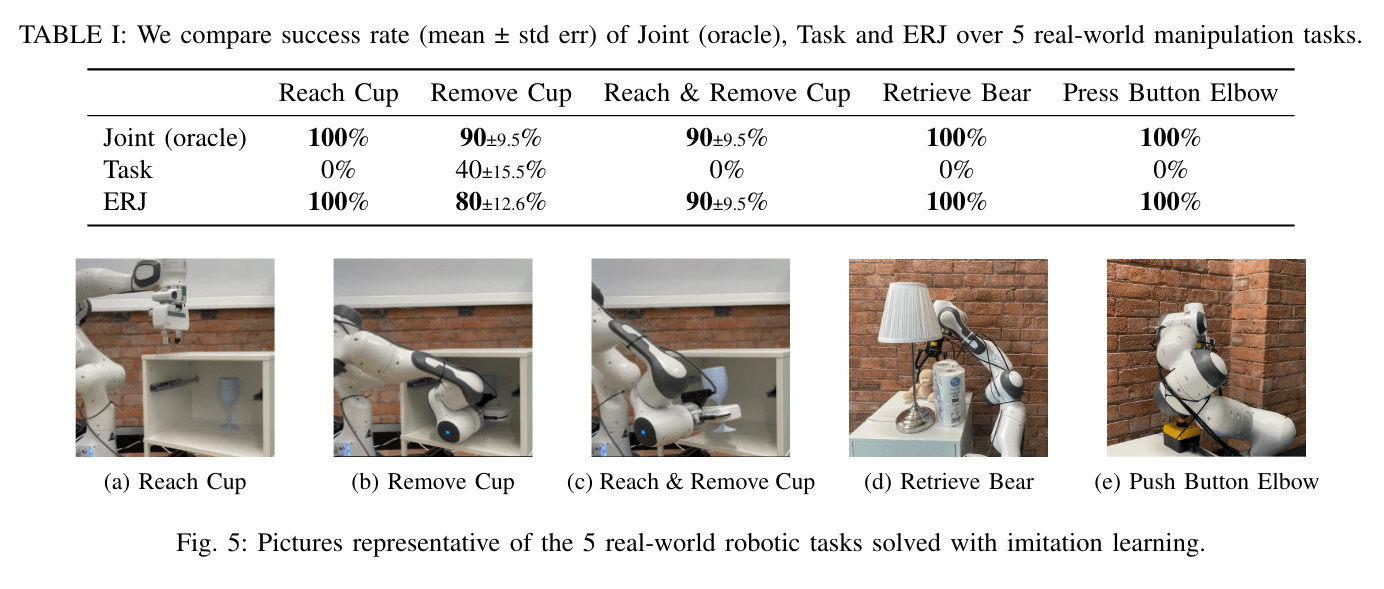
Results: Imitation Learning (ACT)
Redundancy-aware Action Spaces for Robot Learning, Mazzaglia, Backshall, Ma, James
Connections to Constrained Planning
What Could We Do Next?
- More gracefully handle IK failures
- Good engineering is essential for end-effector control, but maybe there are also research-y things
- What should we do if the policy asks for something that is not possible?
- Focus more on behavior cloning
- More extensive experiments, try diffusion policy
- Action spaces for mobile manipulation?
- Better handling branches of IK function
- Authors discussed that these problems were appearing in practice for ERA, not for ERJ
Robot Locomotion Group
Redundancy-aware Action Spaces for Robot Learning
Reading Group Presentation by Thomas Cohn
RLG Short Talk - September 12, 2025
Pietro Mazzaglia, Nicholas Backshall, Xiao Ma, Stephen James