Planning for Constrained Systems in Minimal Coordinates

Thomas Cohn
Amazon Robotics Visits RLG, Fall 2025
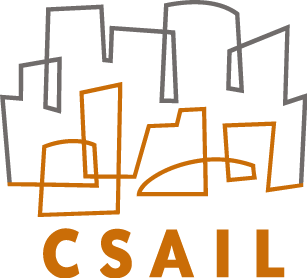
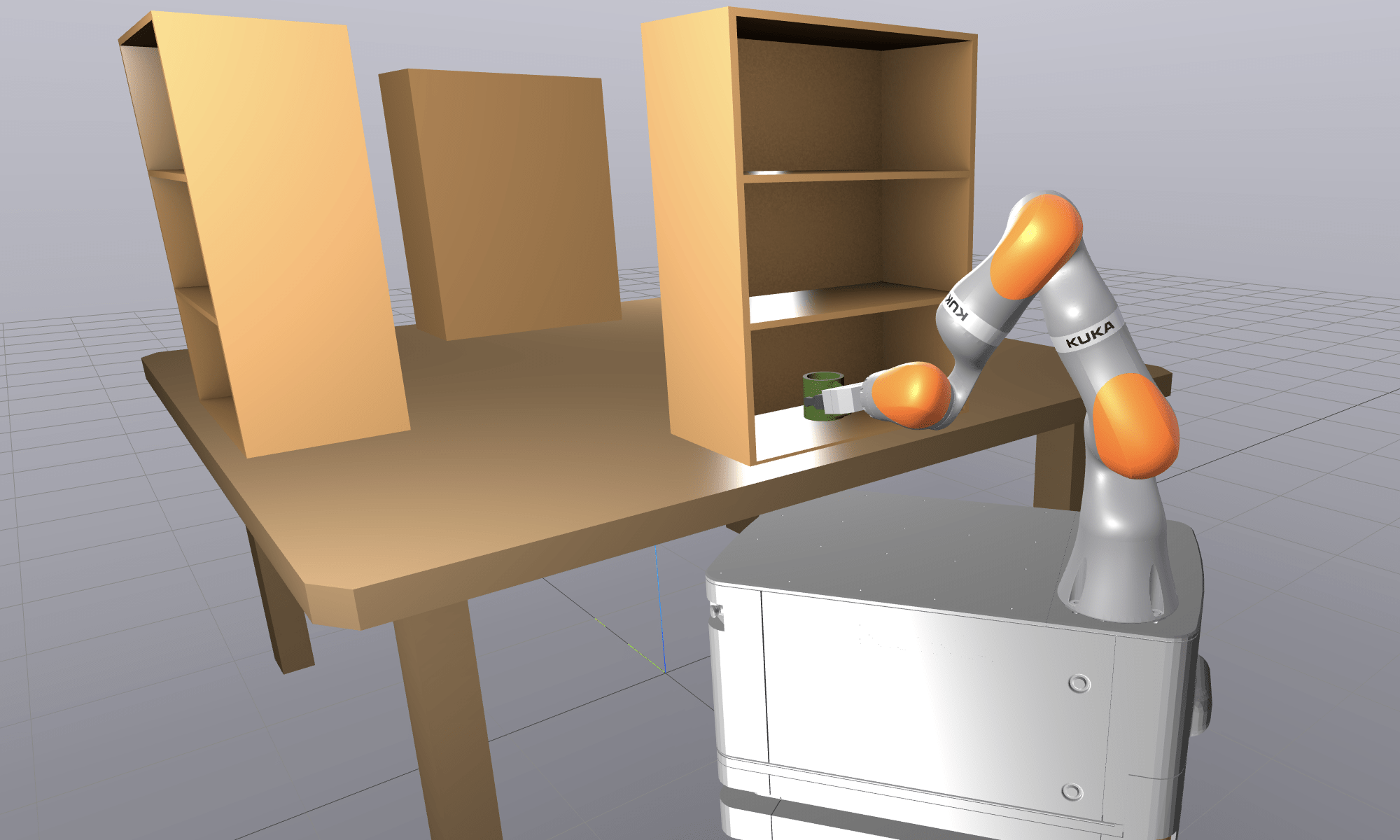
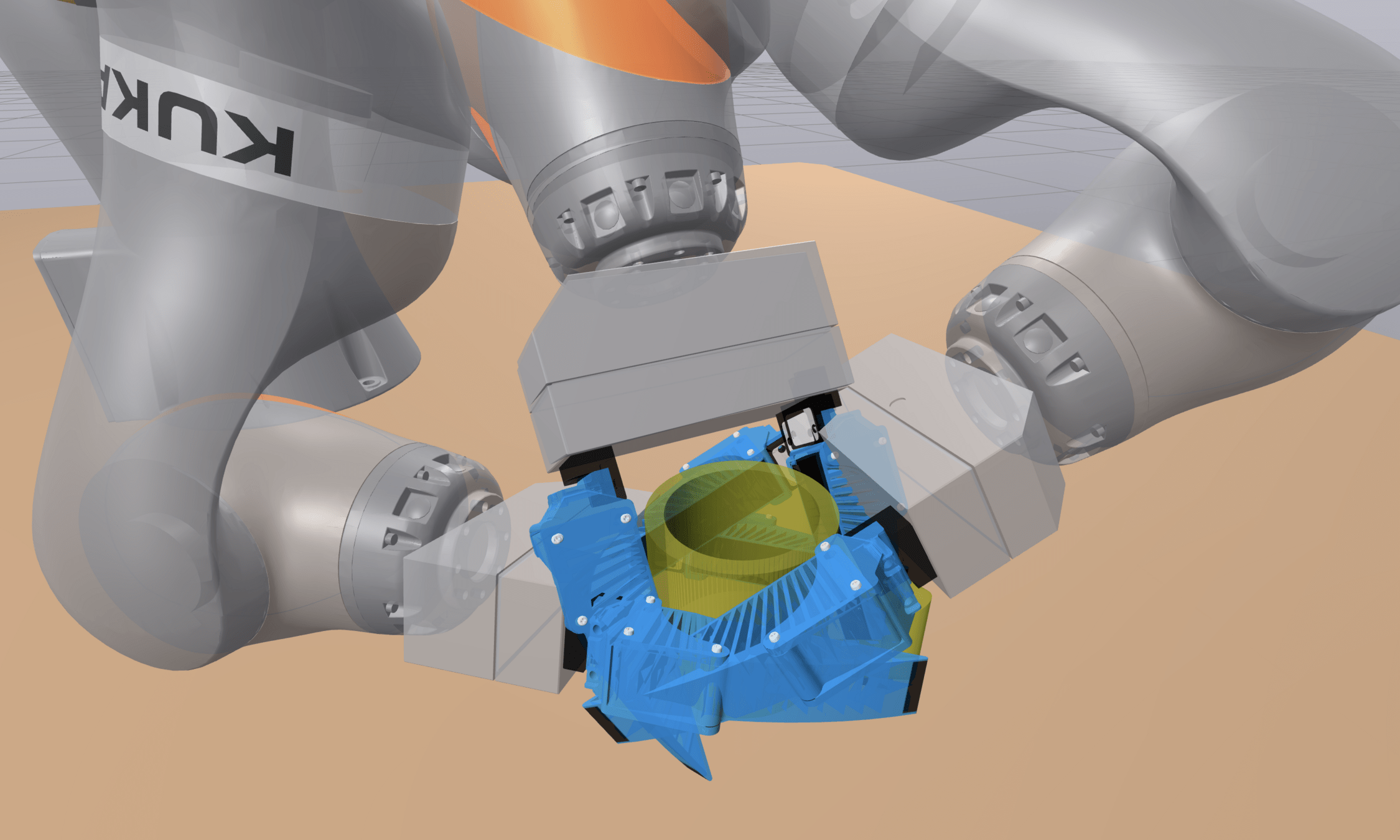
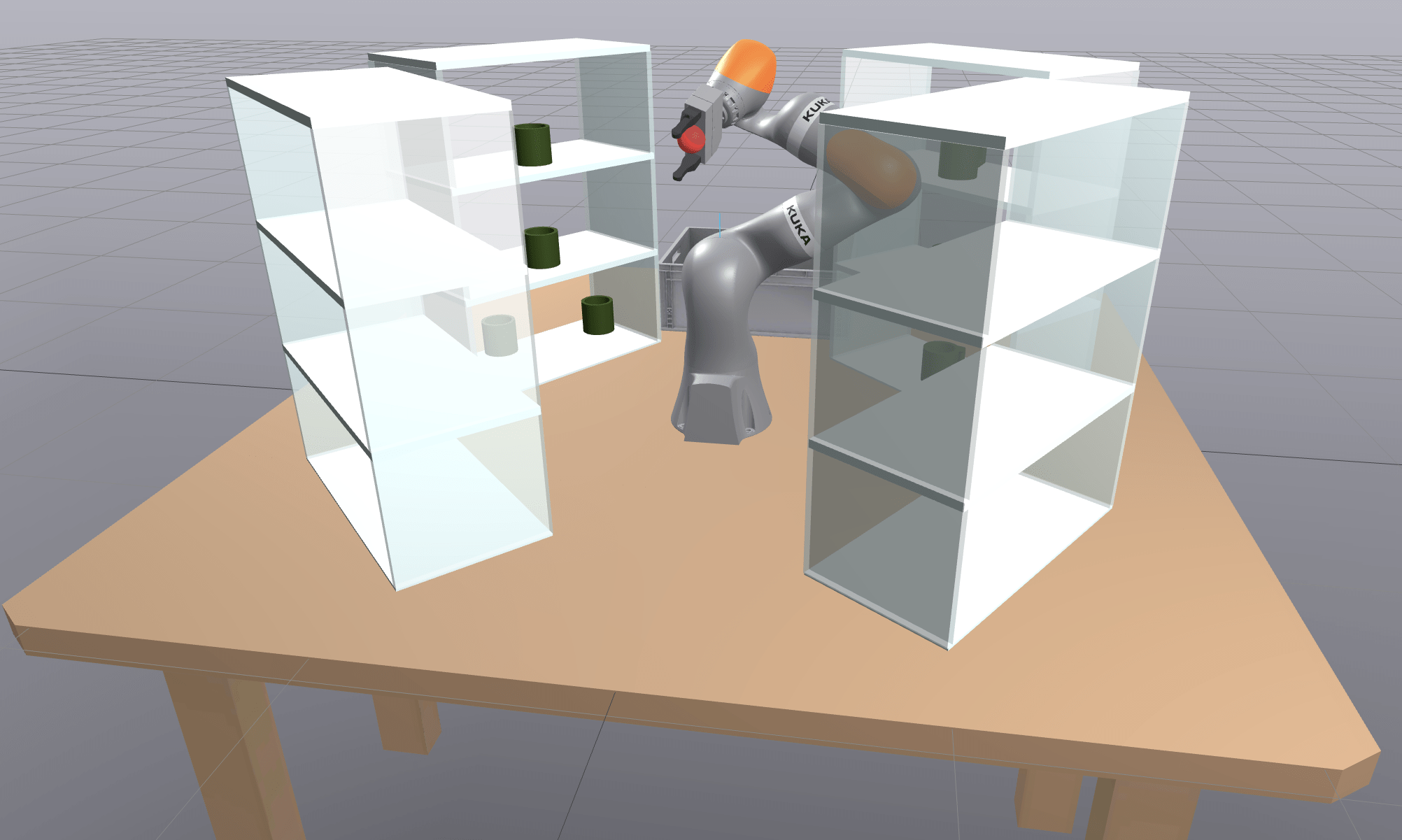
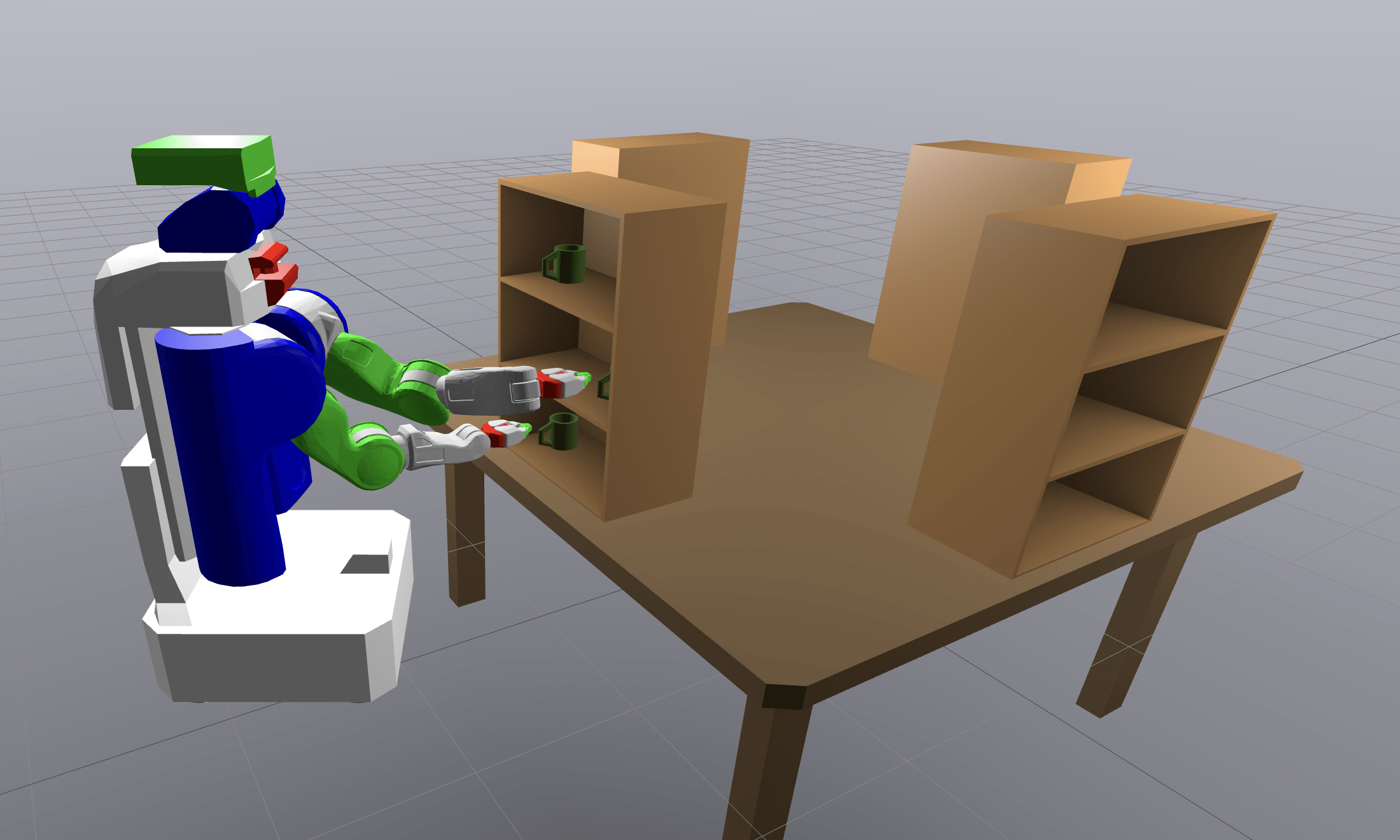
Setup: Kinematic Constraints
Learning the Metric of Task Constraint Manifolds for Constrained Motion Planning, Zha et. al.
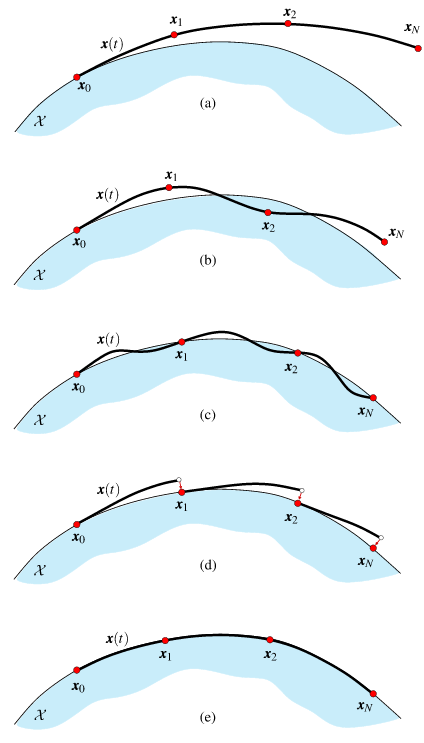
Sampling-Based Planning
Trajectory Optimization
Existing Approaches
Sampling-Based Methods for Motion Planning with Constraints, Kingston et. al.
Direct Collocation Methods for Trajectory
Optimization in Constrained Robotic Systems, Bordabla et. al.

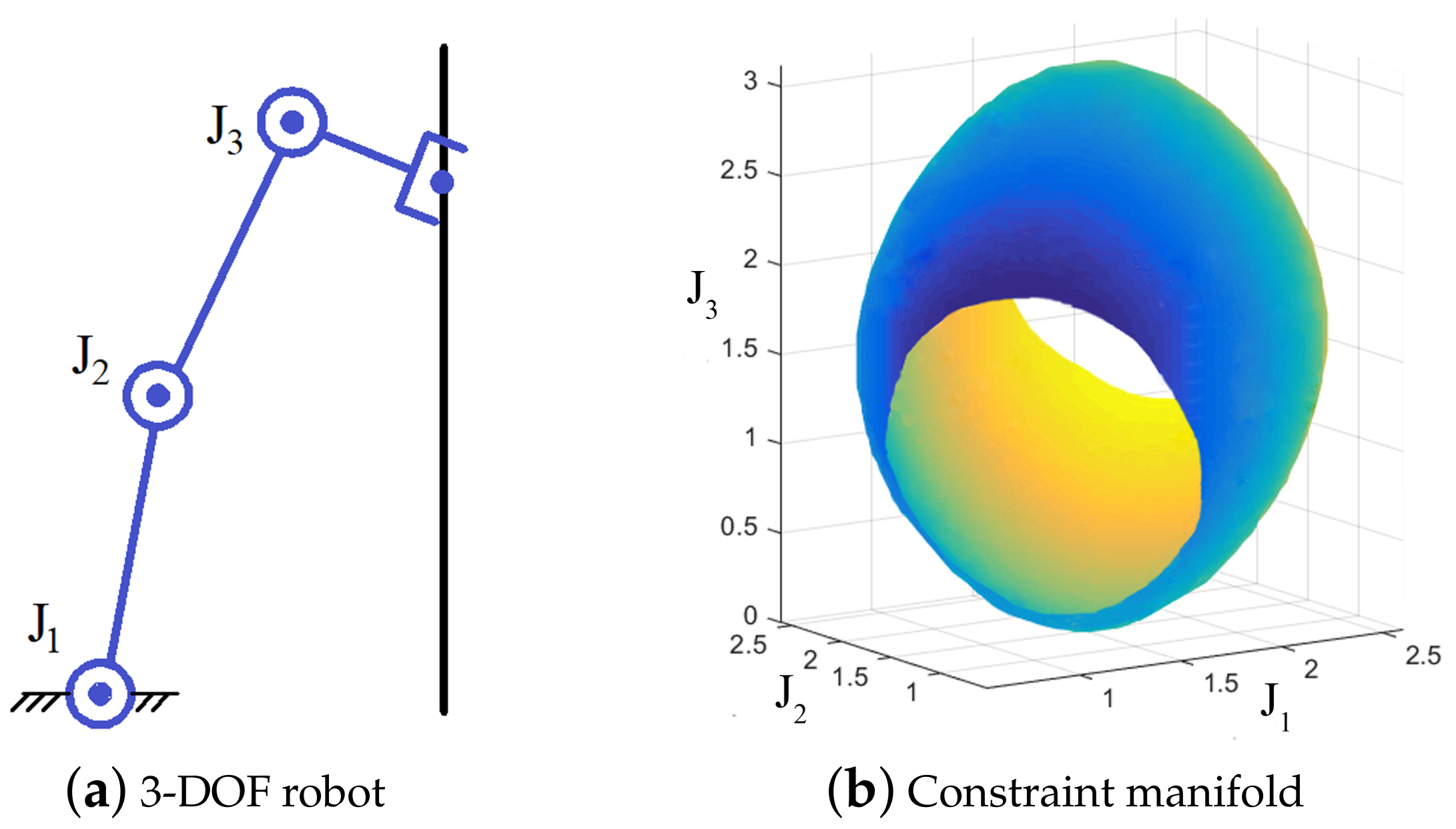
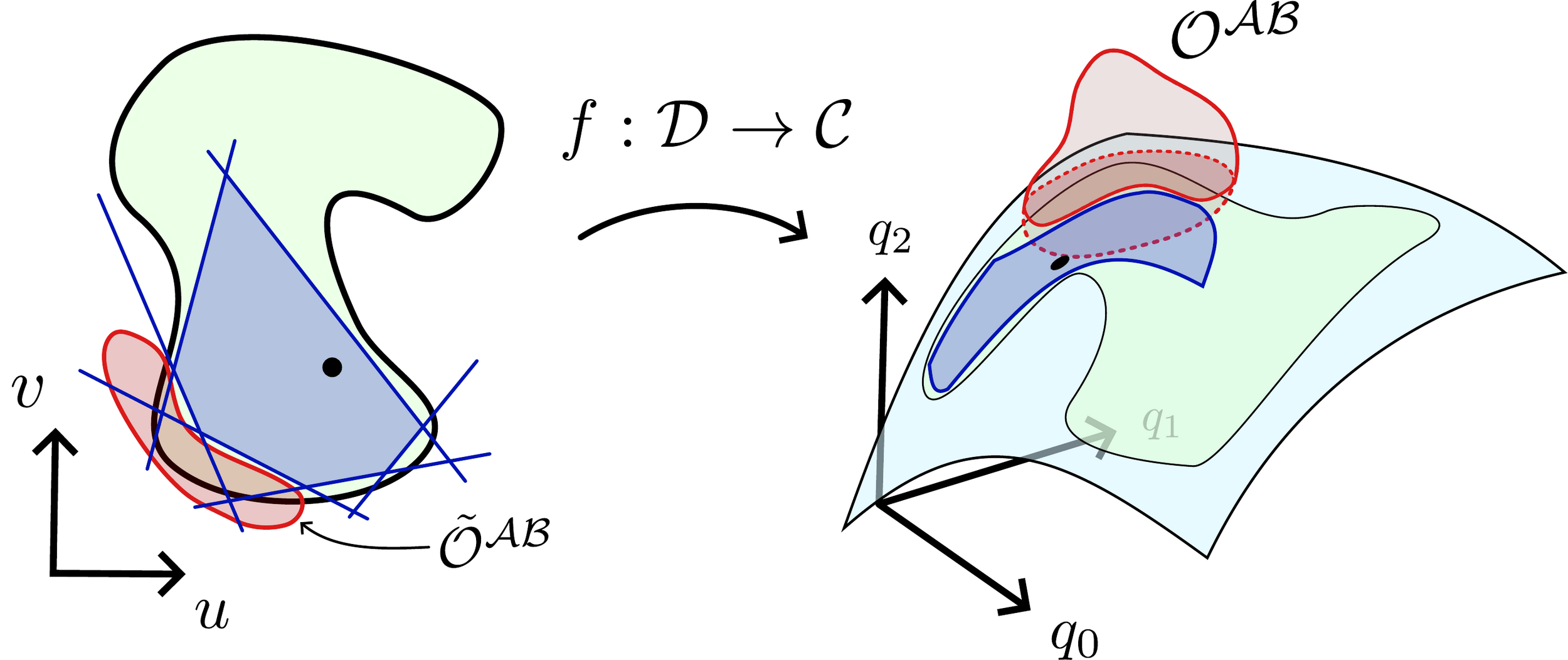
Last Time: Parametrizing the Constraint Manifold
Last Time: Parametrizing the Constraint Manifold
Now: A Testing Suite for More General Parametrizations
Each Optimization IK Problem Performs Better with a Parametrization
Parametrizations to Test...
- Learned IK functions (e.g. generative modeling)
- Algebraic Methods (IK-Geo, IKFast)
- Eigenvalue IK methods
Goal: completely general solutions -- no by-hand derivations required
With Lucas Tang, Alex Amice
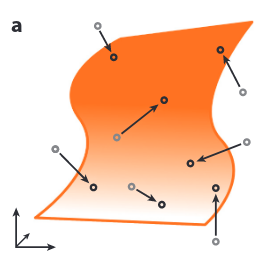
Last Time: IRIS-NP Regions
Now: Better Region Generation
Generalize IRIS-ZO and IRIS-NP2 to plan on a parametrization
- 100-300x Speedup
- 5-8x Fewer Hyperplanes
- Larger Volume
- Smaller Fraction in Collision
With Peter Werner and Rebecca Jiang
Last Time: Planning with GcsTrajOpt
Now: Changing IK Branches

Robot Arm Path Planning Using Modified Particle Swarm Optimization based on D* algorithm, Sadiq et. al.
With Seiji Shaw
Planning for Constrained Systems in Minimal Coordinates
Thomas Cohn
Amazon Robotics Visits RLG, Fall 2025