Lecture 04: Files, Memory, and Processes
Principles of Computer Systems
Autumn 2019
Stanford University
Computer Science Department
Lecturer: Philip Levis

- Linux maintains a data structure for each active process. These data structures are called
process control blocks, and they are stored in theprocess table
- Process control blocks store many things (the user who launched it, what time it was launched, CPU state, etc.). Among the many items it stores is the
file descriptor table
- A file descriptor in a process is a small integer that's an index into this table
- Descriptors 0, 1, and 2 are standard input, standard output, and standard error, but there are no predefined meanings for descriptors 3 and up. When you run a program from the terminal, descriptors 0, 1, and 2 are most often bound to the terminal (we'll learn today how and why)

File Descriptor Table and File Descriptors

- A file descriptor as the identifier needed to interact with a resource (most often a file) via system calls (e.g.,
read, write,andclose) - Many system calls allocate file descriptors
- read: open a file
- socket: create a socket (bidirectional byte-stream, e.g., TCP/IP aka the Internet)
- pipe: create two unidirectional byte streams (one read, one write) between processes
- accept: accept a connection request, returns descriptor to new socket
- The process control block tracks which descriptors are in use and which ones aren't
- When allocating a new file descriptor, kernel chooses the smallest available number
- These semantics are important! If you close stdout (1) then open a file, it will be assigned to file descriptor 1 so act as stdout (this is how
$ cat in.txt > out.txtworks)
- These semantics are important! If you close stdout (1) then open a file, it will be assigned to file descriptor 1 so act as stdout (this is how
Creating and Using File Descriptors
-
E.g., a file descriptor (for a regular file) keeps track of a current position in the file
- If you read 1000 bytes, the next read will be from 1000 bytes after the preceding one
- If you write 380 bytes, the next write will start 380 bytes after the preceding one
- If you want multiple processes to write to the same log file and have the results be intelligible, then you have all of them share a single file descriptor: their calls to write will be serialized and occur in some linear order
File Descriptor Table Entries vs. File Descriptors
- A entry in the file descriptor table is just a pointer to a file descriptor
- Multiple entries in a table can point to the same descriptor
- Entries in different tables (different processes!) can point to the same descriptor

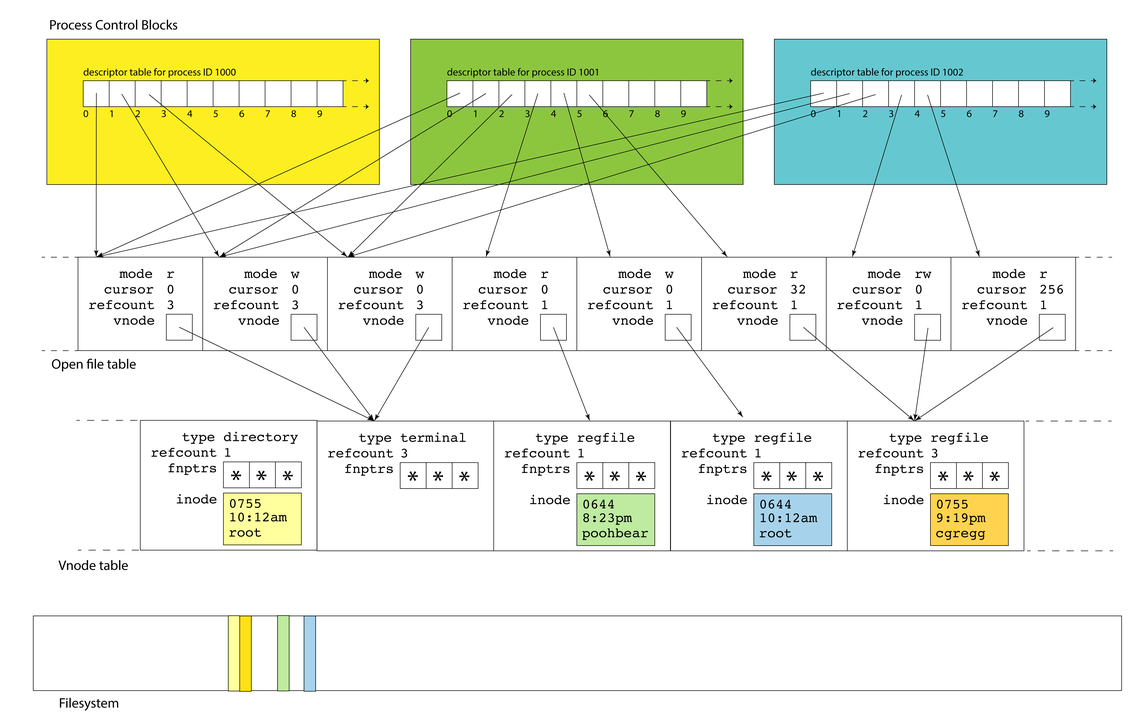
- Each process maintains its own descriptor table, but there is only one, system-wide open file table. This allows for file resources to be shared between processes, and we'll soon see just how common shared file resources really are.
File Descriptors vs. Open File Table
- At any one time, there are multiple active processes, each of which typically has many—well, at least three—open descriptors.
- As drawn above, descriptors 0, 1, and 2 in each of the three PCBs alias the same three sessions. That's why each of the referred table entries have refcounts of 3 instead of 1.
- This shouldn't surprise you. If your
bashshell callsmake, which itself callsg++, each of them inserts text into the same terminal window.

Lecture 04: Filesystem Data Structures
- The data structure stores file type (e.g. regular file, directory, symlink, terminal), a refcount, the collection of function pointers that should be used to read, write, and otherwise interact with the resource, and, if applicable, a copy of the inode that resides on the filesystem on behalf of that file. In this sense, the vnode is an inode cache that brings information about the file (e.g. file size, owner, permissions, etc.) so that it can be accessed more quickly.
- Each of the open file entries maintains access to a vnode, which itself is a structure housing static information about a file or file-like resource.

Lecture 04: Filesystem Data Structures
- There is one system-wide vnode table for the same reason there is one system-wide open file table. Independent file sessions reading from the same file don't need independent copies of the vnode. They can all alias the same one.

Lecture 04: Filesystem Data Structures
- None of these kernel-resident data structures are visible to users. Note the filesystem itself is a completely different component, and that filesystem inodes of open files are loaded into vnode table entries. The yellow inode in the vnode is an in-memory replica of the yellow sliver of memory in the filesystem.
Lecture 04: System Calls
-
System calls are functions that our programs use to interact with the OS and request some core service be executed on their behalf.
- Examples of system calls we've seen this quarter:
open, read, write, close, stat, and lstat. We'll see may others in the coming weeks. - Functions like printf, malloc, and opendir aren't themselves system calls. They're C library functions that themselves rely on system calls to get their jobs done.
- Examples of system calls we've seen this quarter:
- Unlike traditional user functions (the ones we write ourselves, libc and libstdc++ library functions), system calls need to execute in some privileged mode so they can access data structures, system information, and other OS resources intentionally hidden from user code.
- The implementation of open, for instance, needs to access all of the filesystem data structures for existence and permissioning. Filesystem implementation details should be be hidden from the user, and permission information should be respected as private.
- The information loaded and manipulated by open should be inaccessible to the user functions that call open.
- Restated, privileged information shouldn't be discoverable.
- That means we need a different call and return model for system calls than we have for traditional functions.
Lecture 04: System Calls
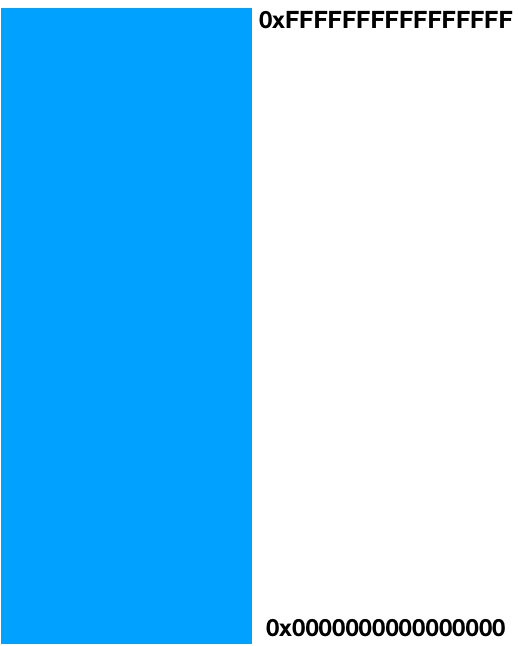
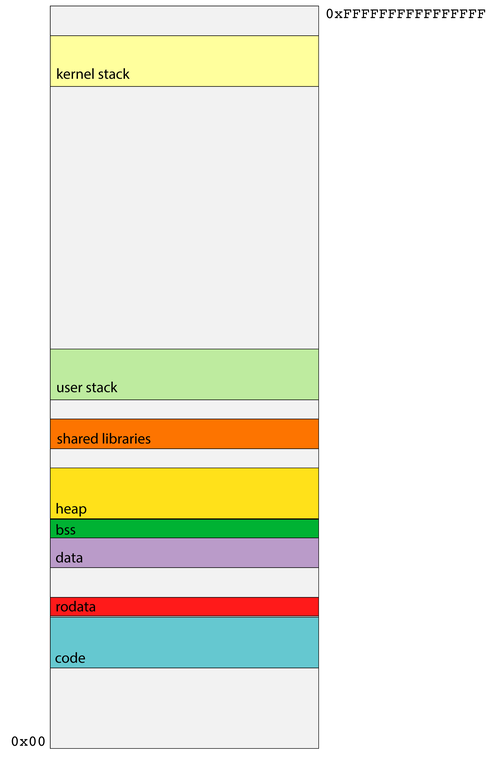
- Recall that each process operates as if it owns all of main memory.
- The diagram on the right presents a 64-bit process's general memory playground that stretches from address 0 up through and including 264 - 1.
- CS107 and CS107-like intro-to-architecture courses present the diagram on the right, and discuss how various portions of the address space are cordoned off to manage traditional function call and return, dynamically allocated memory, access global data, and machine code storage and execution.
- No process actually uses all 264 bytes of its address space. In fact, the vast majority of processes use a miniscule fraction of what they otherwise think they own.
Lecture 04: System Calls
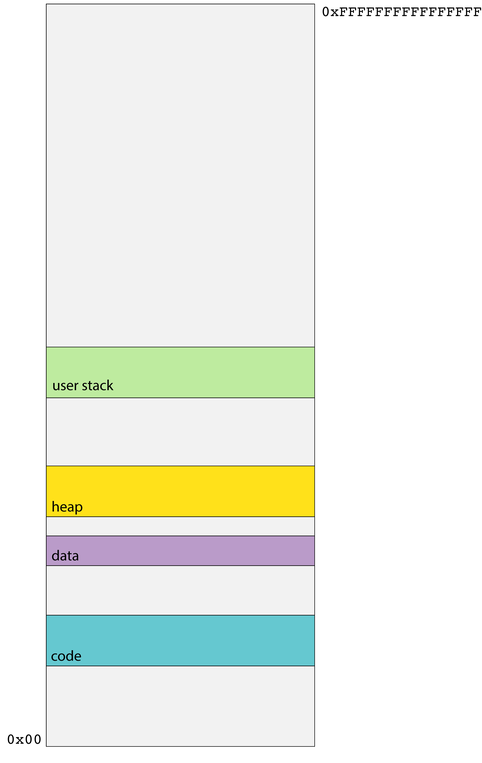
- The code segment stores all of the assembly code instructions specific to your process. The address of the currently executing instruction is stored in the
%ripregister, and that address is typically drawn from the range of addresses managed by the code segment. - The data segment intentionally rests directly on top of the code segment, and it houses all of the explicitly initialized global variables that can be modified by the program.
- The heap is a software-managed segment used to support the implementation of
malloc,realloc,free, and their C++ equivalents. It's initially very small, but grows as needed for processes requiring a good amount of dynamically allocated memory. - The user stack segment provides the memory needed to manage user function call and return along with the scratch space needed by function parameters and local variables.
Lecture 04: System Calls
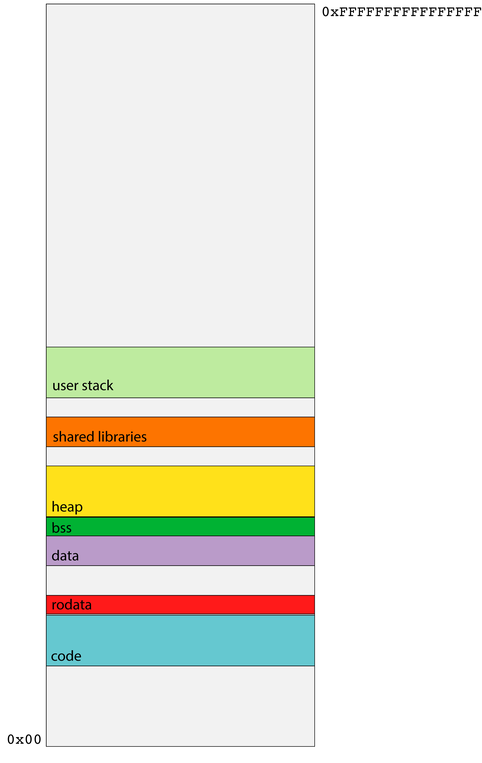
- There are other relevant segments that haven't been called out in prior classes—at least not in CS107 here (although some are covered in CS107E).
- The
rodatasegment also stores global variables, but only those which are immutable—i.e. constants. As the runtime isn't supposed to change anything read-only, the segment housing constants can be protected so any attempts to modify it are blocked by the OS. - The bss segment houses the uninitialized global variables, which are defaulted to be zero (one of the few situations where pure C provides default values).
- The shared library segment links to shared libraries like
libcandlibstdc++with code for routines like C'sprintf, C'smalloc, or C++'sgetline. Shared libraries get their own segment so all processes can trampoline through some glue code—that is, the minimum amount of code necessary—to jump into the one copy of the library code that exists for all processes.
Lecture 04: System Calls
- The user stack maintains a collection of stack frames for the trail of currently executing user functions.
- 64-bit process runtimes rely on
%rspto track the address boundary between the in-use portion of the user stack and the portion that's on deck to be used should the currently executing function invoke a subroutine. - The x86 64 runtime relies on
callqandretqinstructions for user function call and return.
- The first six parameters are passed through
%rdi,%rsi,%rdx,%rcx,%r8, and%r9. The stack frame is used as general storage for partial results that need to be stored somewhere other than a register (e.g. a seventh incoming parameter)
Lecture 04: System Calls
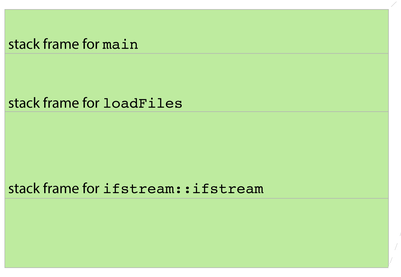
- The user function call and return protocol, however, does little to encapsulate and privatize the memory used by a function.
- Consider, for instance, the execution of
loadFilesas per the diagram below. BecauseloadFiles's stack frame is directly below that of its caller, it can use pointer arithmetic to advance beyond its frame and examine—or even update—the stack frame above it. - After
loadFilesreturns,maincould use pointer arithmetic to descend into the ghost ofloadFiles's stack frame and access dataloadFilesnever intended to expose.
- Functions are supposed to be modular, but the function call and return protocol's support for modularity and privacy is pretty soft.
Lecture 04: System Calls
- System calls like
openandstatneed access to OS implementation detail that should not be exposed or otherwise accessible to the user program. - That means the activation records for system calls need to be stored in a region of memory that users can't touch, and the system call implementations need to be executed in a privileged, superuser mode so that it has access to information and resources that traditional functions shouldn't have.
- The upper half of a process's address space is
kernel space, and none of it is visible to traditional user code. - Housed within kernel space is a kernel stack segment, itself used to organize stack frames for system calls.
-
callqis used for user function call, butcallqwould dereference a function pointer we're not permitted to dereference, since it resides in kernel space. - We need a different call and return model for system calls—one that doesn't rely on
callq.
Lecture 04: System Calls
- The relevant opcode is placed in
%rax. Each system call has its own opcode (e.g. 0 forread, 1 forwrite, 2 foropen, 3 forclose, 4 forstat, and so forth). - The system call arguments—there are at most 6—are evaluated and placed in
%rdi,%rsi,%rdx,%r10,%r8, and%r9. Note the fourth parameter is%r10, not%rcx. - The system issues a software interrupt (otherwise known as a trap) by executing
syscall, which prompts an interrupt handler to execute in superuser mode. - The interrupt handler builds a frame in the kernel stack, executes the relevant code, places any return value in
%rax, and then executesiretqto return from the interrupt handler, revert from superuser mode, and execute the instruction following thesyscall. - If
%raxis negative,errnois set to abs(%rax) and%raxis updated to contain a-1. If%raxis nonnegative, it's left as is. The value in is%raxthen extracted by the caller as any return value would be.
Lecture 04: System Calls
- System Calls Summary
- We use system calls because we don't want user code to have access to sensitive parts of the system, such as raw hardware or networking.
- It isn't possible to restrict access through the normal call/return stack-framed-based function calling procedure.
- A program can modify any data it has access to, and a program's entire stack is completely accessible to the program.
- If the OS let a use program muck around with hardware, shared data structures (e.g., the open file table), or other sensitive information, this would be a security nightmare.
- A system call uses an interrupt to transfer control to the OS kernel. The user can only call a set of well-defined system calls, and there is little room for a security breach.
- Once the kernel is running a system call, it is in complete control of the system, and can access the necessary resources to fulfill the system call's needs.
- After a system call, the kernel returns control to the user program.
Lecture 04: Introduction to Multiprocessing
Until now, we have been studying how programs interact with hardware, and now we are going to start investigating how programs interact with the operating system.
In the CS curriculum so far, your programs have operated in a single process, meaning, basically, that one program was running your code, line-for-line. The operating system made it look like your program was the only thing running, and that was that.
Now, we are going to move into the realm of multiprocessing, where you control more than one process at a time with your programs. You will tell the OS, “do these things concurrently”, and it will.

Lecture 04: Introduction to Multiprocessing
-
What is a process?
- When you start a program, it runs in a single process. It has a process id (an integer) that the OS assigns. A program can get its own process id with the getpid system call:
- All programs are associated with one or more process, and a process is scheduled to run its code by the OS. The OS has to schedule all currently-running processes (i.e., processes that are waiting to run their next line of code), and it does so on a time-shared basis.
- In other words: there may be tens, hundreds, or thousands of processes "running" at once, but on a single-processor system, only one can run at a time, and this is coordinated by the OS.
- On multi-processor machines (like most modern computers), multiple programs can literally run at the same time, one-per processor.
// file: getpidEx.c
#include<stdio.h>
#include<stdlib.h>
#include <unistd.h> // getpid
int main(int argc, char **argv)
{
pid_t pid = getpid();
printf("My process id: %d\n",pid);
return 0;
}cgregg@myth57$ ./getpidEx
My process id: 7526Lecture 04: Introduction to Multiprocessing
-
New system call:
fork- A program may decide that it wants to run multiple processes itself. We will see many examples of why a program may want to do this as the course progresses.

-
- If a program wants to launch a second process, it uses the
forksystem call. -
fork()does exactly this:- It creates a new process that starts on the following instruction after the original, parent, process. The parent process also continues on the following instruction, as well.
- The
forkcall returns apid_t(an integer) to both processes. Neither is the actualpidof the process that receives it:- The parent process gets a return value that is the pid of the child process.
- The child process gets a return value of 0, indicating that it is the child.
- The child process does, indeed, have its own pid, but it would need to call
getpiditself to retrieve it.
- The child process does, indeed, have its own pid, but it would need to call
- All memory is identical between the parent and child, though it is not shared (it is copied).
- If a program wants to launch a second process, it uses the
Lecture 04: Introduction to Multiprocessing
-
New system call:
fork- The reason that the parent and its child get different return values from
forkis twofold:- It differentiates them. It is almost a certainty that the parent and child will have different objectives after the
fork, and it is useful for a process to know whether it is the parent or the child. - It is useful for the parent to know its child's pid. There is no other way for a parent to easily get its children's process ids (if a child wants to get its parent's pid, it can call
getppid)
- It differentiates them. It is almost a certainty that the parent and child will have different objectives after the
- Here's a simple program that knows how to spawn new processes. It uses the system calls
fork,getpid, andgetppid. The full program can be viewed right here.
- The reason that the parent and its child get different return values from
int main(int argc, char *argv[]) {
printf("Greetings from process %d! (parent %d)\n", getpid(), getppid());
pid_t pid = fork();
assert(pid >= 0);
printf("Bye-bye from process %d! (parent %d)\n", getpid(), getppid());
return 0;
}Lecture 04: Introduction to Multiprocessing
- Here is the output of two consecutive runs of the program:
myth60$ ./basic-fork
Greetings from process 29686! (parent 29351)
Bye-bye from process 29686! (parent 29351)
Bye-bye from process 29687! (parent 29686)
myth60$ ./basic-fork
Greetings from process 29688! (parent 29351)
Bye-bye from process 29688! (parent 29351)
Bye-bye from process 29689! (parent 29688- There are a couple of things to note about this program:
- The original process has a parent, which is the shell -- that is the program that you run in the terminal.
- The ordering of the parent and child output is nondeterministic. Sometimes the parent prints first, and sometimes the child prints first.
int main(int argc, char *argv[]) {
printf("Greetings from process %d! (parent %d)\n", getpid(), getppid());
pid_t pid = fork();
assert(pid >= 0);
printf("Bye-bye from process %d! (parent %d)\n", getpid(), getppid());
return 0;
}Lecture 04: Introduction to Multiprocessing
-
forkis called once, but it returns twice.-
forkknows how to clone the calling process, synthesize a virtually identical copy of it, and schedule the copy as if it were running all along.- All segments (data, bss, init, stack, heap, text) are faithfully replicated.
- All open file descriptors are replicated, and these copies are donated to the clone.
- As a result, the output of our program is the output of two processes.
- We should expect to see a single greeting but two separate bye-byes.
- Each bye-bye is inserted into the console by two different processes. The OS's process scheduler dictates whether the child or the parent gets to print its bye-bye first.
-
getpidandgetppidreturn the process id of the caller and the process id of the caller's parent, respectively.
-
Lecture 04: Introduction to Multiprocessing
- You might be asking yourself, How do I debug two processes at once? This is a very good question!
gdbhas built-in support for debugging multiple processes, as follows:-
set detach-on-fork off- This tells
gdbto capture anyfork'd processes, though it pauses them upon thefork.
- This tells
-
info inferiors- This lists the processes that
gdbhas captured.
- This lists the processes that
-
inferior X- Switch to a different process to debug it.
-
detach inferior X- Tell
gdbto stop watching the process, and continue it
- Tell
- You can see an entire debugging session on the
basic-forkprogram right here.
-
Lecture 04: Introduction to Multiprocessing
- Differences between parent calling
forkand child generated by it:- The most obvious difference is that each gets a unique process id. That's important. Otherwise, the OS can't tell them apart.
- Another key difference:
fork's return value in the two processes- When
forkreturns in the parent process, it returns the pid of the new child - When
forkreturns in the child process, it returns 0. Again, that isn't to say the child's pid is 0, but rather thatforkelects to return a 0 as a way of allowing the child process to easily self-identify as the child process. - The return value can be used to dispatch each of the two processes in a different direction (although in this introductory example, we don't do that).
- When
Lecture 04: Introduction to Multiprocessing
- Differences between parent calling
forkand child generated by it:- The most obvious difference is that each gets a unique process id. That's important. Otherwise, the OS can't tell them apart.
- Another key difference:
fork's return value in the two processes- When
forkreturns in the parent process, it returns the pid of the new child - When
forkreturns in the child process, it returns 0. Again, that isn't to say the child's pid is 0, but rather thatforkelects to return a 0 as a way of allowing the child process to easily self-identify as the child process. - The return value can be used to dispatch each of the two processes in a different direction (although in this introductory example, we don't do that).
- When
-
All data segments are replicated. Aside from checking the return value of
fork, there is virtually no difference in the two processes, and they both continue afterforkas if they were the original process. - There is no default sharing of data between the two processes, though the parent process can
wait(more below) for child processes to complete. - You can use shared memory to communicate between processes, but this must be explicitly set up before making
forkcalls (you will not be responsible for shared memory in this course)
Lecture 04: Introduction to Multiprocessing
-
Second example: A tree of
forkcalls- While you rarely have reason to use
forkthis way, it's instructive to trace through a short program where spawned processes themselves callfork. The full program can be viewed right here.
- While you rarely have reason to use
static const char const *kTrail = "abcd";
int main(int argc, char *argv[]) {
size_t trailLength = strlen(kTrail);
for (size_t i = 0; i < trailLength; i++) {
printf("%c\n", kTrail[i]);
pid_t pid = fork();
assert(pid >= 0);
}
return 0;
}Lecture 04: Introduction to Multiprocessing
-
Second example: A tree of
forkcalls- Two samples runs on the right
- Reasonably obvious: A single
ais printed by the soon-to-be-great-grandaddy process. - Less obvious: The first child and the parent each return from
forkand continue running in mirror processes, each with their own copy of the global"abcd"string, and each advancing to thei++line within a loop that promotes a 0 to 1. It's hopefully clear now that twob's will be printed. - Key questions to answer:
- Why aren't the two
b's always consecutive? - How many
c's get printed? - How many
d's get printed? - Why is there a shell prompt in the middle of the output of the second run on the right?
- Why aren't the two
myth60$ ./fork-puzzle
a
b
c
b
d
c
d
c
c
d
d
d
d
d
d
myth60$myth60$ ./fork-puzzle
a
b
b
c
d
c
d
c
d
d
c
d
myth60$ d
d
dLecture 04: Introduction to Multiprocessing
-
Third example: Synchronizing between parent and child using
waitpid-
waitpidcan be used to temporarily block one process until a child process exits.
- The first argument specifies the wait set, which for the moment is just the id of the child process that needs to complete before
waitpidcan return. - The second argument supplies the address of an integer where termination information can be placed (or we can pass in
NULLif we don't care for the information). - The third argument is a collection of bitwise-or'ed flags we'll study later. For the time being, we'll just go with 0 as the required parameter value, which means that
waitpidshould only return when a process in the supplied wait set exits. - The return value is the pid of the child that exited, or -1 if
waitpidwas called and there were no child processes in the supplied wait set.
- The first argument specifies the wait set, which for the moment is just the id of the child process that needs to complete before
-
pid_t waitpid(pid_t pid, int *status, int options);Lecture 04: Introduction to Multiprocessing
-
Third example: Synchronizing between parent and child using
waitpid- Consider the following program, which is more representative of how
forkreally gets used in practice (full program, with error checking, is right here):
- Consider the following program, which is more representative of how
int main(int argc, char *argv[]) {
printf("Before.\n");
pid_t pid = fork();
printf("After.\n");
if (pid == 0) {
printf("I am the child, and the parent will wait up for me.\n");
return 110; // contrived exit status
} else {
int status;
waitpid(pid, &status, 0)
if (WIFEXITED(status)) {
printf("Child exited with status %d.\n", WEXITSTATUS(status));
} else {
printf("Child terminated abnormally.\n");
}
return 0;
}
}Lecture 04: Introduction to Multiprocessing
-
Third example: Synchronizing between parent and child using
waitpid- The output is the same every single time the above program is executed.
- The implementation directs the child process one way, the parent another.
- The parent process correctly waits for the child to complete using
waitpid. - The parent lifts child exit information out of the
waitpidcall, and uses theWIFEXITED
macro to examine some high-order bits of its argument to confirm the process exited normally, and it uses theWEXITSTATUSmacro to extract the lower eight bits of its argument to produce the child return value (which we can see is, and should be, 110). - The
waitpidcall also donates child process-oriented resources back to the system.
- The output is the same every single time the above program is executed.
myth60$ ./separate
Before.
After.
After.
I am the child, and the parent will wait up for me.
Child exited with status 110.
myth60$Lecture 04: Introduction to Multiprocessing
-
Synchronizing between parent and child using
waitpid- This next example is more of a brain teaser, but it illustrates just how deep a clone the process created by
forkreally is (full program, with more error checking, is right here).
- The code emulates a coin flip to seduce exactly one of the two processes to sleep for a second, which is more than enough time for the child process to finish.
- The parent waits for the child to exit before it allows itself to exit. It's akin to the parent not being able to fall asleep until he/she knows the child has, and it's emblematic of the types of synchronization directives we'll be seeing a lot of this quarter.
- The final
printfgets executed twice. The child is always the first to execute it, because the parent is blocked in itswaitpidcall until the child executeseverything.
- This next example is more of a brain teaser, but it illustrates just how deep a clone the process created by
int main(int argc, char *argv[]) {
printf("I'm unique and just get printed once.\n");
bool parent = fork() != 0;
if ((random() % 2 == 0) == parent) sleep(1); // force exactly one of the two to sleep
if (parent) waitpid(pid, NULL, 0); // parent shouldn't exit until child has finished
printf("I get printed twice (this one is being printed from the %s).\n",
parent ? "parent" : "child");
return 0;
}Lecture 04: Introduction to Multiprocessing
-
Spawning and synchronizing with multiple child processes
- A parent can call
forkmultiple times, provided it reaps the child processes (viawaitpid) once they exit. If we want to reap processes as they exit without concern for the order they were spawned, then this does the trick (full program checking right here):
- A parent can call
int main(int argc, char *argv[]) {
for (size_t i = 0; i < 8; i++) {
if (fork() == 0) exit(110 + i);
}
while (true) {
int status;
pid_t pid = waitpid(-1, &status, 0);
if (pid == -1) { assert(errno == ECHILD); break; }
if (WIFEXITED(status)) {
printf("Child %d exited: status %d\n", pid, WEXITSTATUS(status));
} else {
printf("Child %d exited abnormally.\n", pid);
}
}
return 0;
}
Lecture 04: Introduction to Multiprocessing
-
Spawning and synchronizing with multiple child processes
- Note we feed a -1 as the first argument to
waitpid. That -1 states we want to hear about any child as it exits, and pids are returned in the order their processes finish. - Eventually, all children exit and
waitpidcorrectly returns -1 to signal there are no more processes under the parent's jurisdiction. - When
waitpidreturns -1, it sets a global variable callederrnoto the constantECHILDto signalwaitpidreturned -1 because all child processes have terminated. That's the "error" we want.
- Note we feed a -1 as the first argument to
myth60$ ./reap-as-they-exit
Child 1209 exited: status 110
Child 1210 exited: status 111
Child 1211 exited: status 112
Child 1216 exited: status 117
Child 1212 exited: status 113
Child 1213 exited: status 114
Child 1214 exited: status 115
Child 1215 exited: status 116
myth60$myth60$ ./reap-as-they-exit
Child 1453 exited: status 115
Child 1449 exited: status 111
Child 1448 exited: status 110
Child 1450 exited: status 112
Child 1451 exited: status 113
Child 1452 exited: status 114
Child 1455 exited: status 117
Child 1454 exited: status 116
myth60$Lecture 04: Introduction to Multiprocessing
-
Spawning and synchronizing with multiple child processes
- We can do the same thing we did in the first program, but monitor and reap the child processes in the order they are forked.
- Check out the abbreviated program below (full program with error checking right here):
int main(int argc, char *argv[]) {
pid_t children[8];
for (size_t i = 0; i < 8; i++) {
if ((children[i] = fork()) == 0) exit(110 + i);
}
for (size_t i = 0; i < 8; i++) {
int status;
pid_t pid = waitpid(children[i], &status, 0);
assert(pid == children[i]);
assert(WIFEXITED(status) && (WEXITSTATUS(status) == (110 + i)));
printf("Child with pid %d accounted for (return status of %d).\n",
children[i], WEXITSTATUS(status));
}
return 0;
}
Lecture 04: Introduction to Multiprocessing
-
Spawning and synchronizing with multiple child processes
- This version spawns and reaps processes in some first-spawned-first-reaped manner.
- The child processes aren't required to exit in FSFR order.
- In theory, the first child thread could finish last, and the reap loop could be held up on its very first iteration until the first child really is done. But the process zombies—yes, that's what they're called—are reaped in the order they were forked.
- Below is a sample run of the
reap-in-fork-orderexecutable. The pids change between runs, but even those are guaranteed to be published in increasing order.
myth60$ ./reap-as-they-exit
Child with pid 4689 accounted for (return status of 110).
Child with pid 4690 accounted for (return status of 111).
Child with pid 4691 accounted for (return status of 112).
Child with pid 4692 accounted for (return status of 113).
Child with pid 4693 accounted for (return status of 114).
Child with pid 4694 accounted for (return status of 115).
Child with pid 4695 accounted for (return status of 116).
Child with pid 4696 accounted for (return status of 117).
myth60$