Mechanical Engineering, Carnegie Mellon University
Advisors: Prof. Burak Kara, Prof. Jessica Zhang
Agenda
- Motivation
- Closing the design-analysis loop
- Solve PDEs in complex geometries
- Project Ideas
- ML Accelerated Meshing
- Isogeometric Analysis
- PDE surrogate models
- Orthogonal Polynomials
- Goal
- Software product
- Novel algorithm, implementation
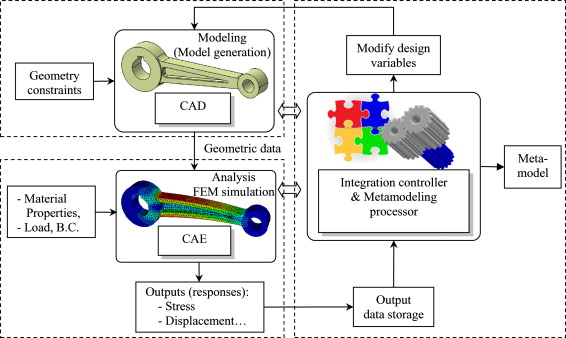
Motivation: close the loop in Computer-Aided-Engineering Cycle
Boundary-reps
NURBS
Exact geometry
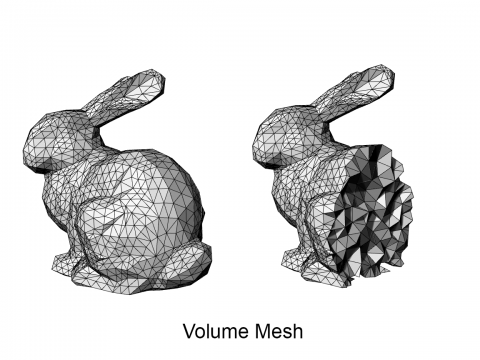
Volume mesh
Linear tets, hexes
Inexact geometry
Automated optimization loop
Geometry discretization is a major bottleneck
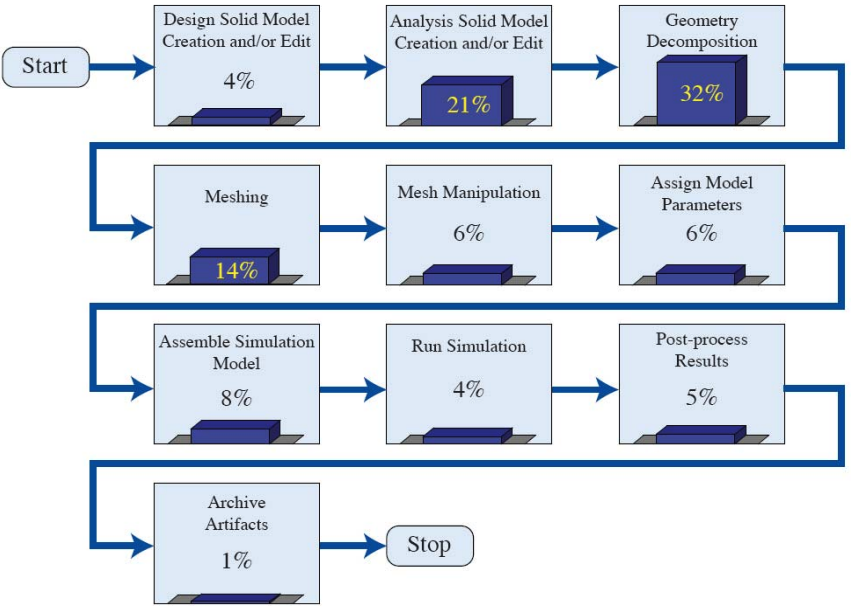
manual
error-prone
nonlinear
Mesh Iteration
Want: solve PDEs in complex geometries
Goal: Alleviate pain of translating between geometry representations
Implicit Geometry
Boundary-rep (NURBS)
Volume mesh (tets, hexes)
- Computer aided design
- All engineering applications
- Numerical PDEs
- Graphics
- Visualization
- Additive manufacturing
- Level set methods
- Easy to implement
- Low storage
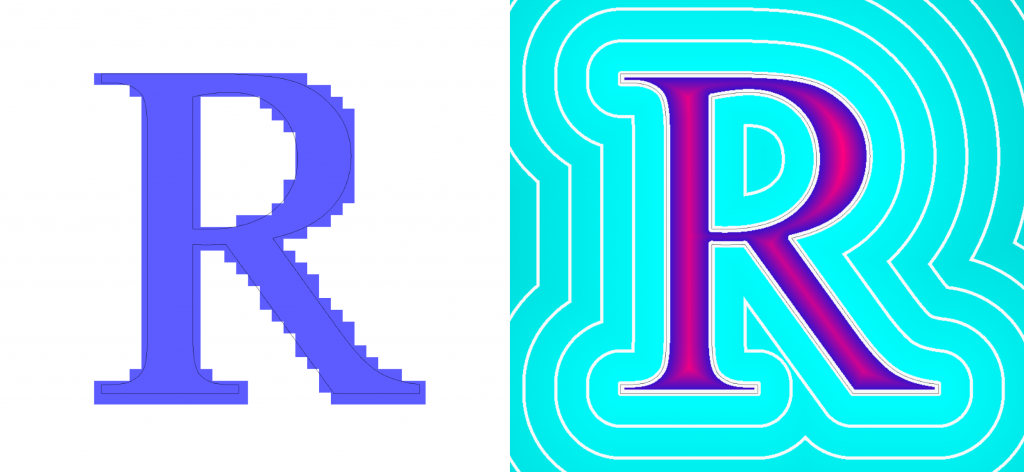
Q. What representation do neural networks like?
Topic - machine learning accelerated meshing
DistMesh (Persson, 2004)
Implicit Geometry
Volume Mesh
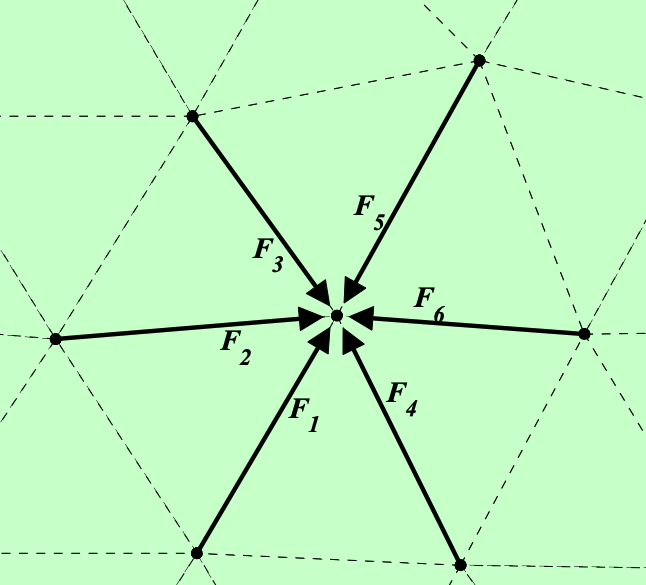
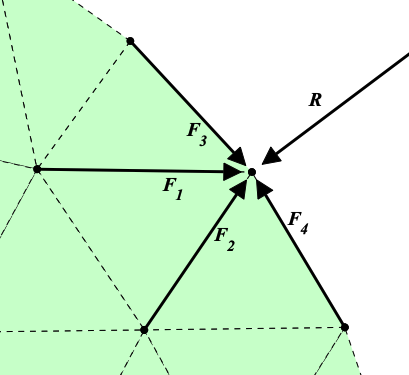
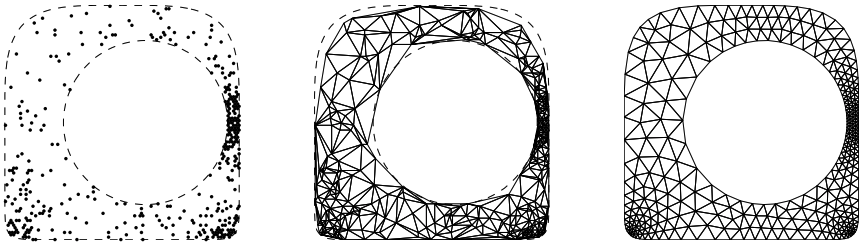
Method
- Solve force balance at grid points
- Update node locations
- Project outside nodes back to boundary
- Repeat 1-3 till equilibrium is reached
Equivalent to a Laplacian smoothing of point distribution
Topic - machine learning accelerated meshing
# Update mesh with gradient descent
sdf = load_geom()
x, y = generate_rand_pts(sdf)
Nepochs = 100
learning_rate = 0.01
function loss(mesh)
# enter heuristics here
return loss_val
end
for i = 1:Nepochs
mesh = triangulate(x, y)
resi = loss(mesh)
resi < tol && break
dx, dy = gradient(resi)
x = x + dx * learning_rate
y = y + dy * learning_rate
x, y = project_boundary_nodes(x, y, sdf)
endUpdate node locations with gradient descent
Heuristics:
- (PDEs) Eigenvalues of \(\Delta\), residual of \(\Delta u = 1\)
- Point density near boundary
- Element aspect ratio, mesh grading
- Matching boundary curvature
Implicit Geometry
Volume Mesh
Topic - machine learning based PDE surrogates
Motivation
- We care about the physics of the problem, not the solution value at every grid point
- A global PDE solve seems unnecessary for simulating physics
Goal
- Use neural networks to "learn" physics
- Develop architectures that respect the properties of the system. Eg.
- convolutions respect locality
- transformers are self-learning (attention)
- Use differentiable programming to tackle nested high dimensional problems in computational workflows
| Orthogonal Functions | Deep Neural Networks |
|---|---|
|
|
|
|
|
|
|
|
Aside - ML beats the Curse of Dimensionality-ish
\( N \) parameters, \(M\) points
\( h \sim N^{-c/d} \)
\( h \sim 1 / N \) (for 2-layer networks)
\( N \) points
\( \dfrac{d}{dx} \tilde{f}\sim \mathcal{O}(N^2) \) (exact)
\( \dfrac{d}{dx} \tilde{f} \sim \mathcal{O}(N) \) (exact, AD)
\( \int_\Omega \tilde{f} dx \sim \mathcal{O}(N) \) (quadrature, exact)
(Weinan, 2020)
\( \int_\Omega \tilde{f} dx \sim \mathcal{O}(M) \) (Monte-Carlo, approx)
Aside - our goal is to add ML to the simulation pipeline
Mesh
\(A\underline{u} = M\underline{f} \)
Domain
Governing Equation
Boundary Constraint
\( NN_\theta \)
Discretization
\( \dfrac{d}{dt} \underline{u} = f(\underline{u}) \)
Solving
Discrete Problems
\(u(\underline{x},t) \)
\(u(\underline{x}) \)
Solution
Loss
Backpropogation
Data
\( NN_\theta \)
\( NN_\theta \)
Linear Solver
Time-Stepper
Need high-level, fast, AD-compatible software ecosystem!
Aside - We are building an differentiable PDEs ecosystem
Strategy: Build out a unified PDEs ecosystem for Julia SciML!
Abstractions
Composable
AD support
Fast solvers
DL ecosystem
Large (NNs + solvers)
Multiple discretizations
Wants
Fast adjoints
Method
Interoperability
Optimized methods
High performance
High level
Unified PDEs interface
Wrap SOTA solvers
ML based discrs
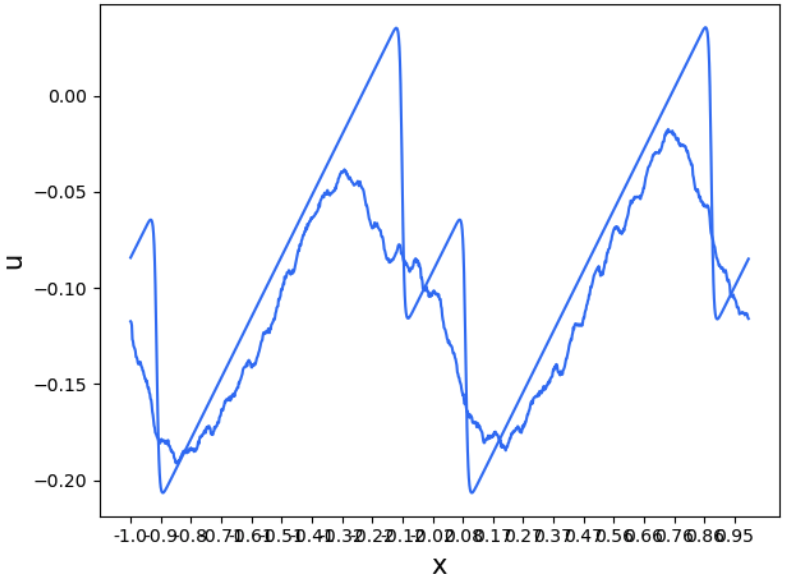
PDE Surrogates - Learning the closure to Burgers turbulence
Closure Model
Deterministic
Shocks
Energy Cascade
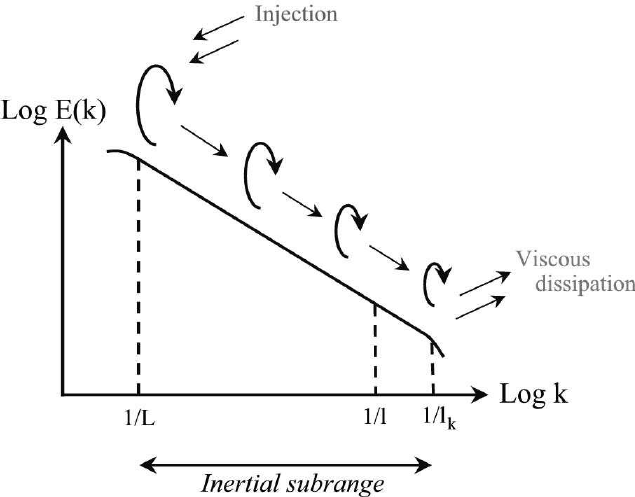
Eddy Viscosity Model
Vanilla Neural Network
PDE Surrogates - machine learning has an I/O problem
Problem: DNNs produce noisy output.
Solution: SOTA architectures use geometry respecting convolutions
Graph NN
Convolution NN
Convolution autoencoder
Latent space embedding
Convolution decoder
Field output
Fourier Neural Operators
PDE Surrogates - convolutions
For PDEs on meshes,
- What geometry representation to use?
- What is the relevant convolution?
- How to translate between meshes?
- How to impose boundary conditions?
(If you know the convolution, the output is guaranteed to be smooth)
PDE Surrogates - we take inspiration from finite-element method
Partition of unity
Smooth basis
Convolution
Latent space embedding
DNN
DNN
DNN
Softmax
Topic - isogeometric analysis
Mechanical Engineering, Carnegie Mellon University
Advisors: Prof. Burak Kara, Prof. Jessica Zhang
Geometry Operator Learning
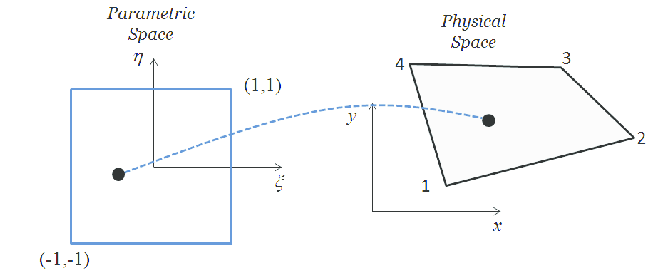
- Want to solve PDEs in complex geometries
- Use an isoparametric mapping to parameterize geometry
- Form linear system (Galerkin projection, collocation method)
- Solve linear system where dependence on \(\underline{x}\) may be nonlinear
- We are very good at applying \(A, M\) (matrix-free). Major cost in inverting
- Problem: cannot reuse information from solve process for different \(\underline{x}\)
Geometry Operator Learning
- Existing work on NN + geometry for PDE solving
- Train on fixed discretization, BC
- Accepts/predicts coefficients to smooth basis
- DNN \(\implies\) can only vary few parameters
- Geometry operator learning:
- Want to solve \( A(\underline{x})\cdot\underline{u}=M(\underline{x})\underline{f}\) for varying \(\underline{x}\)
- Learn the discretized inverse operator and apply it to \(\underline{f}\)
- (LATER) Apply boundary condition using restriction/extension operator
(Deep) Neural Network
(Deep) Neural Network
Discussion
- Advantages
- Maintains linear structure of the problem
- Can save the geometry encoding offline
- Problems
- Operator learning requires a lot of data
- Hard: Want to learn \( N\times N\) matrix from \(N\times 1\) vector
- How to store/apply? Need a compressed form of the matrix
- How does it function operationally?
- Predict the first K singular vectors of \( A^{-1}M \)?
- Predict a sequence of convolutions?
Sandbox: start with 1D Fourier method
- Keep problem size small for fast iterations
- No need to worry about boundary condition
- Differentiation is a diagonal operation
- Discretization scheme
- Collocation
- Galerkin Projection
- Collocation
In 2D
Text
Mechanical Engineering, Carnegie Mellon University
Advisors: Prof. Burak Kara, Prof. Jessica Zhang
Geometry Operator Learning
- Want to solve \( A(\underline{x})\cdot\underline{u}=M(\underline{x})\underline{f}\) for varying \(\underline{x}\)
- Learn the mapping \(\underline{x} \to (A^{-1}M(\underline{x})) \)
- Apply the inverse operator to \(\underline{f}\)
Neural Network
NN = Chain(
Dense(N, N, tanh),
Dense(N, N, tanh),
Dense(N, N, tanh),
Dense(N, N),
)
function fwd_pass(params, x, f)
AinvM = NN(params)(x)
upred = AnvM * f
return upred
endDetails
- Data: triplets \((\underline{x}, \underline{f}, \underline{u})\)
- Model: use vanilla DNN to predict matrix
- Represent \(A^{-1}M\) as full matrix
Experiment 1 - diagonal system
- Predict only the diagonal elements
- True mapping: \( \texttt{x} \to \texttt{1 ./ (x .* x .* d}) \)
- Data: 100 unique \(\underline{x}, \underline{u}\), i.e. 10,000 pairs for train/test sets
- 10k epochs with Adam optimizer
N = 16
NN = Chain(
Dense(N, N, tanh),
Dense(N, N, tanh),
Dense(N, N, tanh),
Dense(N, N),
)
function loss(params, x, f, utrue)
upred = fwd_pass(params, x, f)
norm(upred - utrue, 2)
end
function fwd_pass(params, x, f)
d = NN(params)(x)
D = Diagonal(d)
upred = D * f
return upred
endExperiment 1 - diagonal system
@time p = train(_loss, p; opt = Adam(1f-2), E = 500)
@time p = train(_loss, p; opt = Adam(1f-3), E = 7500)
@time p = train(_loss, p; opt = Adam(1f-4), E = 2000)
TEST: LOSS: 258.62992872, meanAE: 0.53594627, maxAE: 1.93666885
### TRAIN LOOP 1 ###
Iter 500: LOSS: 1.26371044, meanAE: 0.00199481, maxAE: 0.01653739
10.948193 seconds (23.98 M allocations: 16.016 GiB, 5.34% gc time, 60.50% compilation time)
### TRAIN LOOP 2 ###
Iter 7000: LOSS: 0.10834251, meanAE: 0.00021605, maxAE: 0.000802
62.686785 seconds (3.72 M allocations: 203.839 GiB, 8.89% gc time)
### TRAIN LOOP 3 ###
Iter 2500: LOSS: 0.01370436, meanAE: 2.405e-5, maxAE: 0.00021251
21.679660 seconds (1.33 M allocations: 72.838 GiB, 8.30% gc time)
### TEST STATS ###
TEST: LOSS: 0.02013022, meanAE: 3.059e-5, maxAE: 0.00086486
Experiment 2 - 1D Fourier Collocation
- Predict full matrix
- Data: 100 unique \(\underline{x}, \underline{u}\), i.e. 10,000 pairs for train/test sets. Generate data by truncating high freq component of randomly generated vectors
- 10k epochs with Adam optimizer
N = 8
N2 = N * N
NN = Chain( # predict full matrix
Dense(N, N2, tanh),
Dense(N2, N2, tanh),
Dense(N2, N2, tanh),
Dense(N2, N2),
)
function loss(params, x, f, utrue)
upred = fwd_pass(params, x, f)
norm(upred - utrue, 2)
end
function fwd_pass(params, x, f)
m = NN(x, p, st)[1]
M = reshape(m, (N, N, K))
@tensorprod u[i, k] := M[i, j, k] * f[j, k]
endExperiment 2 - 1D Fourier
@time p = train(_loss, p; opt = Adam(1f-2), E = 500)
@time p = train(_loss, p; opt = Adam(1f-3), E = 7000)
@time p = train(_loss, p; opt = Adam(1f-4), E = 2500)
TEST: LOSS: 298.75399229, meanAE: 0.83071813, maxAE: 5.42661399
### TRAIN LOOP 1 ###
Iter 500: LOSS: 33.31564424, meanAE: 0.0878617, maxAE: 0.68316
17.532605 seconds (3.07 M allocations: 56.414 GiB, 1.97% gc time, 3.49% compilation time)
### TRAIN LOOP 2 ###
Iter 7000: LOSS: 1.41257299, meanAE: 0.0039907, maxAE: 0.02882316
194.406308 seconds (4.33 M allocations: 645.357 GiB, 2.68% gc time)
### TRAIN LOOP 3 ###
Iter 2500: LOSS: 0.31676085, meanAE: 0.00084305, maxAE: 0.00857081
71.722907 seconds (1.56 M allocations: 237.522 GiB, 2.44% gc time)
### TEST STATS ###
TEST: LOSS: 3.96048961, meanAE: 0.00304775, maxAE: 0.26578036
Mechanical Engineering, Carnegie Mellon University
Advisors: Prof. Burak Kara, Prof. Jessica Zhang
Updates - Geometry Operator Lerning
-
Problem - solve Poisson eqn over a parameterized geometry
- Method - predict the inverse stiffness matrix as a function of geometry
- Advantage - don't need to invert stiffness matrix for every
x - Result - Predicted
A^-1as a full matrix for 1D Fourier discretization using a vanilla network - We decided to take a deep dive into machine learning before progressing further
Neural Network
Updates
- ML - Watching lectures from CMU DL course. Labs not available, so will do FSDL Pytorch labs
- Literature review - unsure where this work belongs among established lines of research (transfer learning, operator learning). Hold off on literature review till next week when I get a better grasp on ML model space.Software implementation
- Software
- Experiment code
- WIP - Write stiffness matrix over deformed geometry in 2D
- TODO next week - set up the same experiment with Dirichlet/Neumann BCs for other discretizations (Gauss-Legendre, Chebyshev)
- Running bigger jobs - may i have access to a cluster?
- Get access to 3420 WEH
Mechanical Engineering, Carnegie Mellon University
Advisors: Prof. Burak Kara, Prof. Jessica Zhang
From last week (5/26/23)
-
Geometry Operator Learning - presented initial implementation on Wednesday (5/26).
- Target problem - solve
lapl(u) = fover a geometry parameterized byxby predicting the inverse discretized Laplace operatoru = A(x)^{-1} fon the deformed geometry:A^-1 = NN(x). - Results - Predicted
A^-1as a full matrix for 1D Fourier discretization using a vanilla network. - We decided to take a deep dive into machine learning before progressing further.
- Code - Private Github repo. can give you access if you can share your GH handle.
- Target problem - solve
- ML - Watching lectures from CMU DL course. Their labs aren’t available to me, so I’ll do the Pytorch labs from FSDL course
From last week (5/26/23)
-
Software implementation
- WIP - Laplace operator on a deformed space is easy in 1D (
J \ Dr * J \ Dr). Code for n-dimensions is here. I am cleaning this code, and the domain deformation interface in this PR. - TODO next week - set up the same experiment with Dirichlet/Neumann BCs for other discretizations (Gauss-Legendre, Chebyshev).
- WIP - Laplace operator on a deformed space is easy in 1D (
-
Literature Review
- We are unsure where this work belongs among established lines of research (transfer learning, operator learning).
- Right now, I don’t understand papers involving newer ML architectures (transformers, generative models). So I’ll hold off on literature review till next week when I get a better grasp on ML model space.
Updates
-
ML - Watched DL lectures. up till transformers. Next: generative models, autoencoders
- Follow up with implementation: self attention for heat equation. Do we get diagonal matrix?
- Software/ Implementation
- Experiment code
- PRs for gradient propagation through matrix-free operators: this, this
- PR to support fast matrix-free operators in ODE solvers
- WIP: write stiffness matrix over deformed geometry in 2D
- WIP: set up the same experiment with Dirichlet/Neumann BCs + Legendre/ Chebyshev discr
Geometry Operator Learning - Lit Review
-
GEOMETRY POV - aim: solve a PDE over many geometries
- Operator learning: learn the inverse Laplace operator as a function of geometry
- Similar examples:
- Standard: learn PDE solution given as a function of geometry
- Operator learning: learn the inverse Laplace operator as a function of geometry
- MATH POV
- Find the inverse of a parametric matrix as a function of parameters
- Example: ML --> eigenvecs, ml --> matrix factorization
Updates
- Running bigger jobs - may i have access to a linux machine/ cluster?
- Get access to 3414 WEH
Weekly Meeting
Literature Review on Neural Operators
JUN 7, 2023
Vedant Puri
https://github.com/vpuri3
Mechanical Engineering, Carnegie Mellon University
Advisors: Prof. Burak Kara, Prof. Jessica Zhang
References
-
Li et al., Neural Operator: Graph Kernel Network for Partial Differential Equations, arXiv:2003.03485 [cs.LG]
-
Kovachki et al., Neural Operator: Learning Maps Between Function Spaces, arXiv:2108.08481 [cs.LG]
- YouTube video: Andrew Stuart - Supervised Learning for Operators
Problem Setting
(Surrogate modeling) find parameters \( \rightarrow \) solution map from given samples
Given parametric PDE,
(Training) for family of parameterized functions, \(\Psi_\theta: \mathcal{A} \times \Theta \rightarrow \mathcal{U} \), find
Conventional approach: discretize then learn
Fix a grid
Learn finite neural network model \(\mathbb{R}^{N'} \rightarrow \mathbb{R}^N \)
Deep Neural Network
Disadvantages:
- Model implicitly learns grid dependence
- Lack of generalizability/ transferability
PINNs, on the other hand, do not depend on training meshes.
But they represent the solution, \(\tilde{\Psi}(a)\) only for one instance of \(a\)
Neural operators map between Banach spaces
Map between (approximations of) Banach spaces
A single set of network parameters describe any \( \mathcal{A}^{h_k} \rightarrow \mathcal{U}^{h_l}\) mapping
Neural operator models
- Fix \(K\) basis functions in \(\mathcal{A},\, \mathcal{U}\) space using PCA from \(\mu\)
- Interpolate basis to \( \mathcal{A}^{h_a}, \mathcal{U}^{h_u}\), and put them in matrices
- Train neural network to map between basis coefficients
- The basis in \( \mathcal{U}\), is learnable: \( U = U(\theta)\)
- \( L(a)\) can be vector of PCA coefficients, \( A^T\cdot a\), or pointwise observations, \( \{ a(x_l)\}\)
Aside: Green's function and integral operators
For elliptic equation \( \mathcal{L}_a \) parameterized by \(a\),
Then \( \mathcal{L}_a(u) = f \) is solved by
Proof:
Operator models approximate Green's function
- Assume a Green's function exists for \( \mathcal{L}_a \)
- Approximate with sequence of global + local operations
Global convolution
Pointwise transformation
Lifting operation
Graph Kernel Network
- Convolution performed by graph neural network with trainable weights
\( \kappa(x, y, a(x), a(y))\)
pointwise transformation
Using a spectral fourier basis has advantages
\(G^6 \leftarrow G^3 \) interpolation
- Nested points in physical space
- Spectral interpolation is trivial
- Convolution is pointwise in spectral space
- FFT makes transform \(N\log N\)
Fourier neural operator
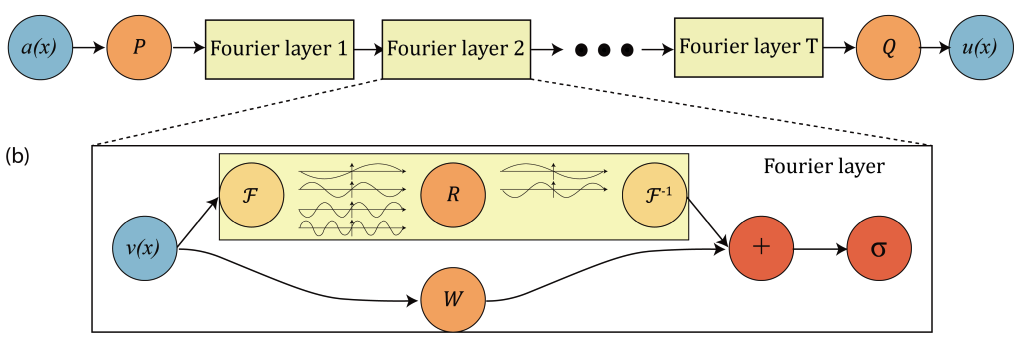
Lifting Operator
Projection Operator
Linear transform on first \(K\) Fourier modes
Local linear transform
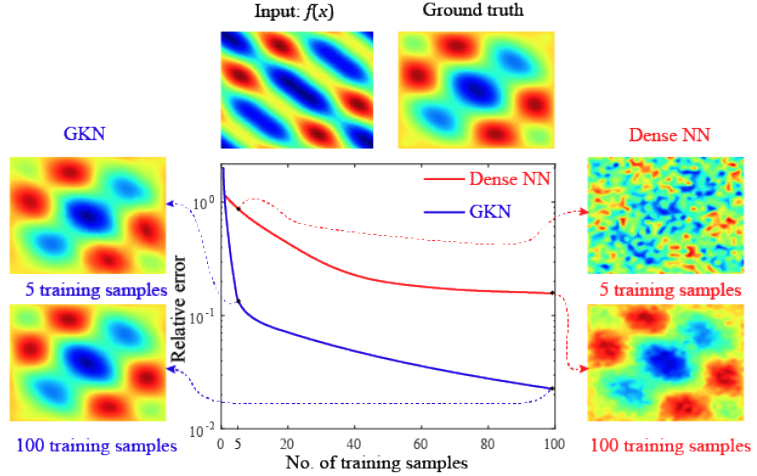
Fourier neural operator results
Advantages
- Surrogate modeling/ inverse modeling - optimization requires cheap, fast solves
- Closure modeling - benefits from grid independence
- Speed up existing solvers with cheap initial guess/ preconditioner
- Train model on first few snapshots of a long time-integration, then use it as incomplete factorization preconditioner.
Discussion
- Grid-independent approximation
- Can pull many data streams, combine with experiments
- Needs very few training samples
Use-Cases
Discussion
- Integral operators work well for elliptical problems, but fail badly for hyperbolic problems (eg. advection equation)
- Fourier not usable for practical problems
- Easiest idea - replace Fourier with Chebyshev and try to involve BCs
- The geometry learning problem is not truly an operator learning problem as described here. It is not grid/resolution independent
Disadvantages
Ideas - how to proceed further?
Mechanical Engineering, Carnegie Mellon University
Advisors: Prof. Burak Kara, Prof. Jessica Zhang
Updates
-
ML crash course - done
-
Logistics
- Need a computer/ compute access
- Need office access (?)
- Neural Operator discussion -> next
Neural Operators
- Surrogate model (parameters \(\longrightarrow \) solution)
- Unique selling point: resolution invariance
Neural Operators
Neural Operator Capabilities/ limitations
- resolution invariance
- fixed geometry
- fixed parameter set (BC, forcing function)
- Works well for elliptic equations, not so well for hyperbolic problems
Our Goals
- Learn surrogate model over varying geometry
-
Decouple training WRT components of a PDE problem
- forcing, BC, geometry, equation parameters
Neural Operators Methodology
Approximate Green's function with NN involving only pointwise evaluations, global convolutions
As (training) discretization is refined, model approximates the continuum operator.
Fourier Neural Operator
- best in class neural operator model
- resolution invariance (on uniform grids)
- restricted to periodic BC
- not very practical (hammer searching for a nail), but very impressive results
- Global convolution performed with FFT in \(\mathcal{O}(N\log N)\)
Involve BC in Neural Operators
For linear equations, eg. Poisson
-
Dependence on \( f \), \( g \) is described by a linear convolution
Proposed Methodology
- Utilize separate neural networks for learning BC, \(f\), and train independently
- \(u_{f_0}\): Neural operator model; \(u_\text{BC}, \, u_{f-f_0} \longrightarrow\) linear convolutions
Mechanical Engineering, Carnegie Mellon University
Advisors: Prof. Burak Kara, Prof. Jessica Zhang
Updates
-
Recap (last week):
-
Neural operators literature review
-
Fourier Neural Operator best in class model
-
Combine local/global operations
-
Resolution invariant, but limited usability
-
-
Target problem: surrogate modeling
-
Want to develop complex geometry analog
-
Separate out training for BCs, forcing
-
-
-
This week:
-
Reread neural operator papers
-
Set up first experiment to test idea
-
Nonlinear in \(a\), linear in \(g, \,f\)
Separate NNs
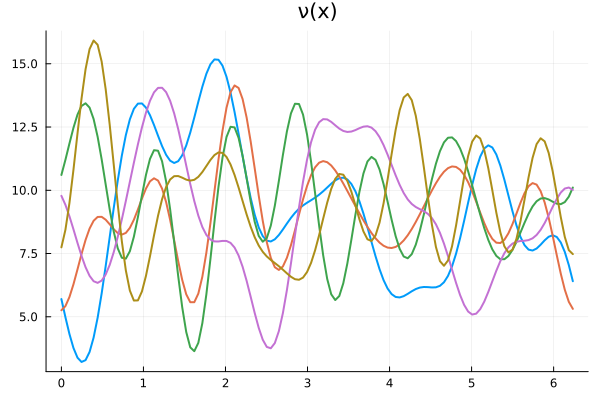
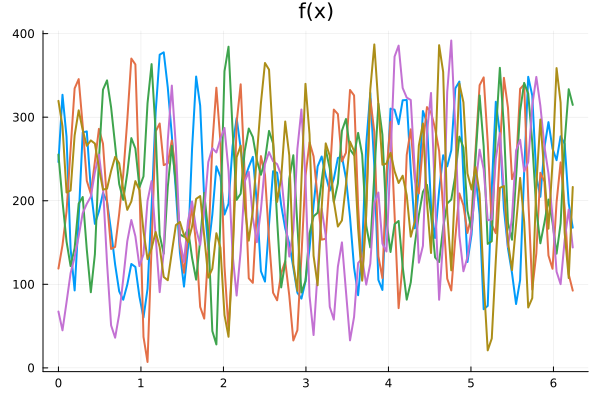
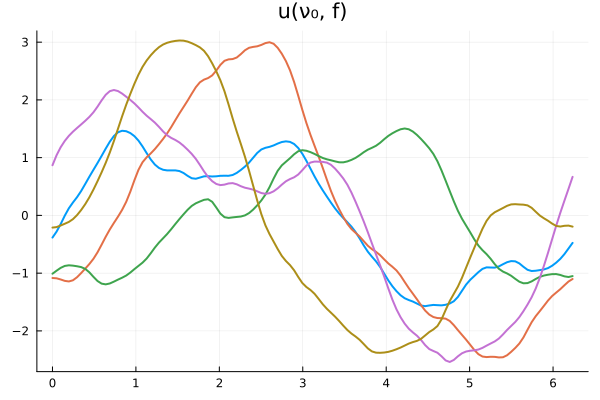
Experiment
-
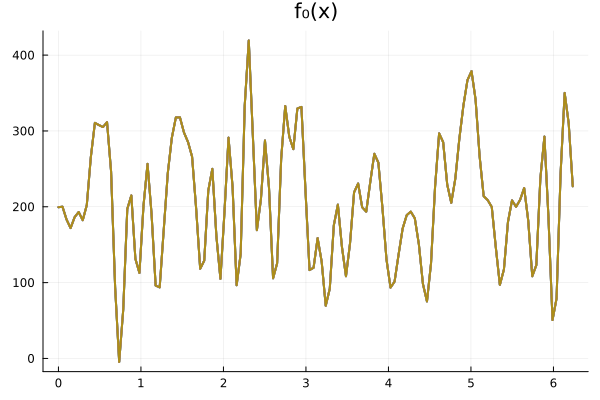
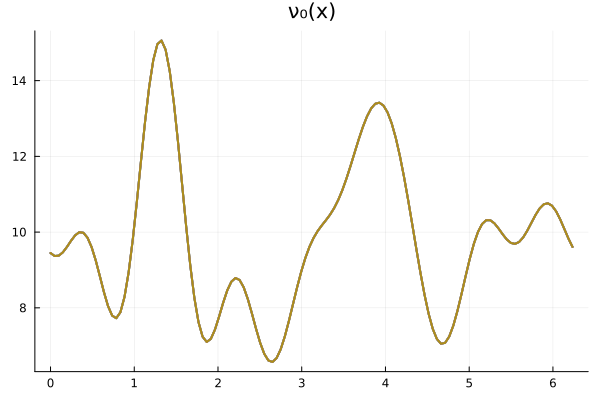
Problem: Find map \(\nu \longrightarrow u\)
-
Superimpose distinct neural networks
-
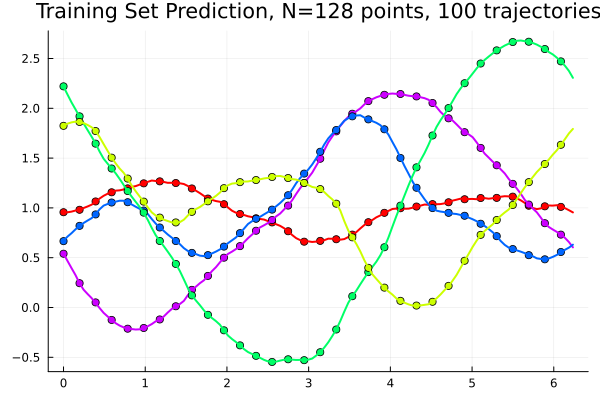
\(N_\nu = 100, \, N_f = 100\) unique fields \( \implies 10k\) unique trajectories
-
\( N = 128 \) point Fourier discretization \( \implies 1.2\,\text{m}\) datapoints
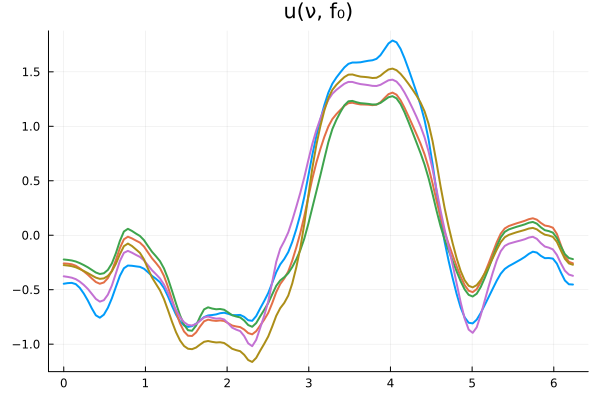
Experiment Part I
-
Trained \(u_{\{\nu\},f_0}\) dense neural network (20k epochs, 60k params)
meanRE: 0.00029135, maxRE: 0.00173817-
Solution much more dependent on \(f\) than on \(\nu\)

meanRE: 0.00348382, maxRE: 0.0233049Experiment Part II (WIP)
-
Trained \(u_{\{a\},f_0}\) dense neural network (20k epochs, 80k params)
-
WIP: replace DNN with linear Fourier Neural Operator
meanRE: 0.00500959, maxRE: 1.953022meanRE: 1.32767527, maxRE: 1608.9298091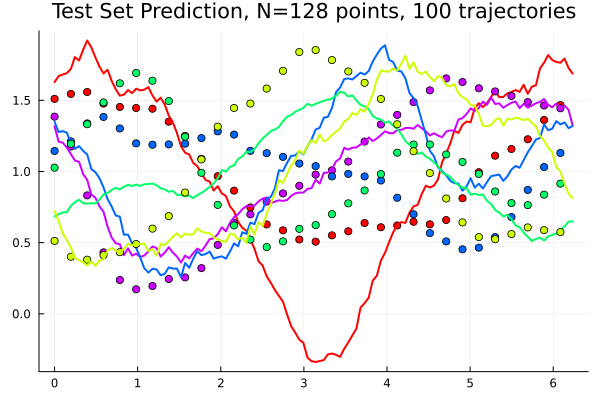
Updates
- Next steps
- Implementing Fourier neural operator for Experiment 1
-
Prepare for next experiment with Dirichlet BC
- Replace Fourier discretization with Chebyshev
- Generate data by solving boundary value problems
- Do more literature review, put it in a document
-
From discussion with Prof. Kara
- R^2 plots
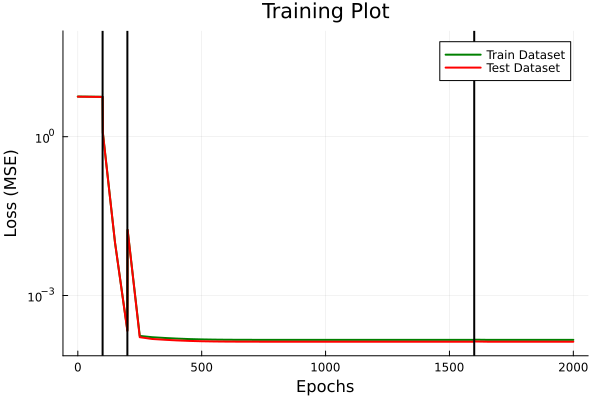
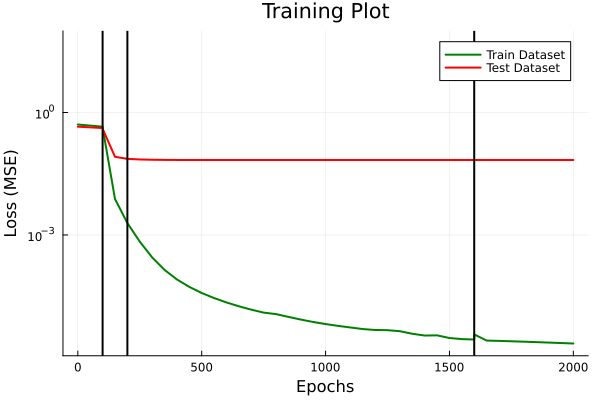
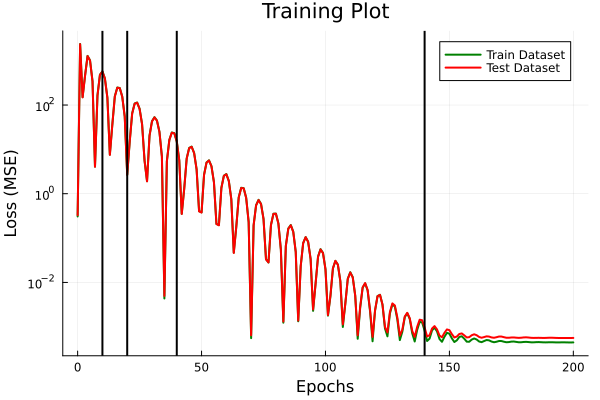
- Loss plots for train/ test sets
Proposed Methodology
Linera convolutions in \(g, \,f\)
Independent training
Separate NNs
\(N_a\) samples
\(N_a\cdot N_g\) samples
\(N_a\cdot N_f\) samples
Mechanical Engineering, Carnegie Mellon University
Advisors: Prof. Burak Kara, Prof. Jessica Zhang
Updates
Goal
Find (surrogate) map \( a \longrightarrow u \) that is
- Cheap to compute
- Generalizes with little data
- Not looking for very high accuracy
Updates from this week
- Implement Fourier Neural Operator model, compare with other networks
- Had some difficulty training, got past that.
- Wrote bilinear neural operator layer
Next Steps
- Construct Chebyshev Neural Operator
- Next experiment: separate out training for BCs, forcing
Neural Operator Kernel
Convolution Kernel
\( Wx\)
\(\mathcal{F}^{-1}W \widehat{x} \)
Local Kernel
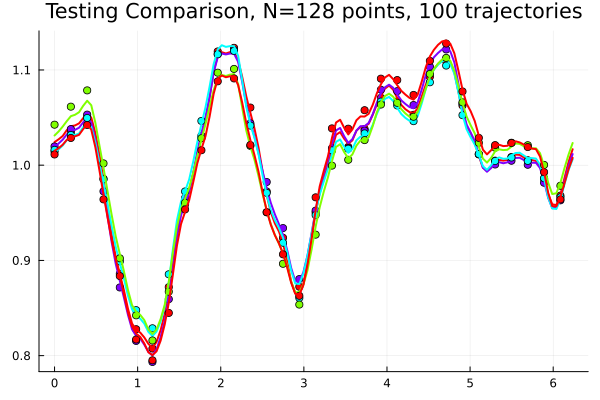
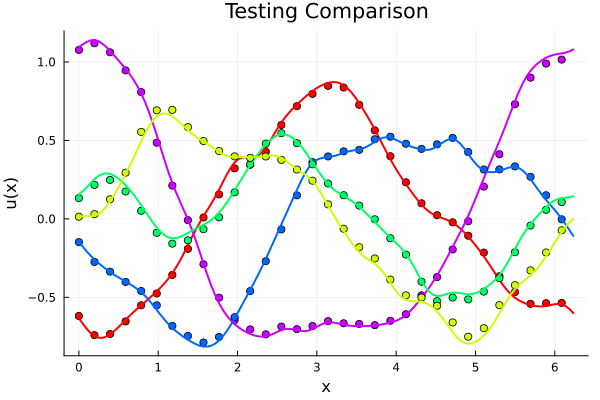
Experiment
-
Problem: Find map \((\nu,f) \longrightarrow u\)
-
Generate data with \( N = 128 \) point Fourier discretization
| # Trajectories | 100 | 100 | 50 * 50 |
| # Points | 12,800 | 12,800 | 320,000 |
-
ML models
-
Pointwise DNN
-
Sequence-to-sequence DNN
-
Fourier Neural Operator
-
Experiment I: \(-\nabla \cdot \nu_0 \nabla u = f \)
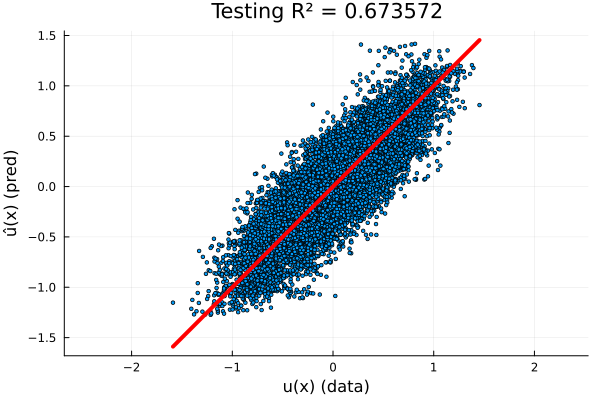
Seq-2-seq DNN
Fourier Neural Operator
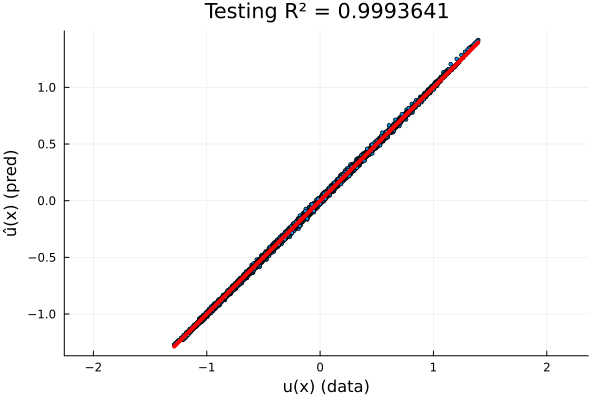
- 64 parameters
- Single FNO spectral convolution layer
- \(R^2=0.999\) on test set
- 82k parameters
- Five \(128\times128\) hidden layers
- \(R^2=0.67\) on test set
Experiment I: \(-\nabla \cdot \nu_0 \nabla u = f \)
Seq-2-seq DNN
Fourier Neural Operator
Experiment I: \(-\nabla \cdot \nu_0 \nabla u = f \)
Seq-2-seq DNN
Experiment I: \(-\nabla \cdot \nu_0 \nabla u = f \)
Fourier Neural Operator
Experiment II: \(-\nabla \cdot \nu \nabla u = f_0 \)
Seq-2-seq DNN
Fourier Neural Operator
- 32 parameters
- Single FNO spectral convolution layer
- \(R^2=0.98\) on test set
- 66k parameters
- Three \(128\times128\) hidden layers
- \(R^2=0.98\) on test set
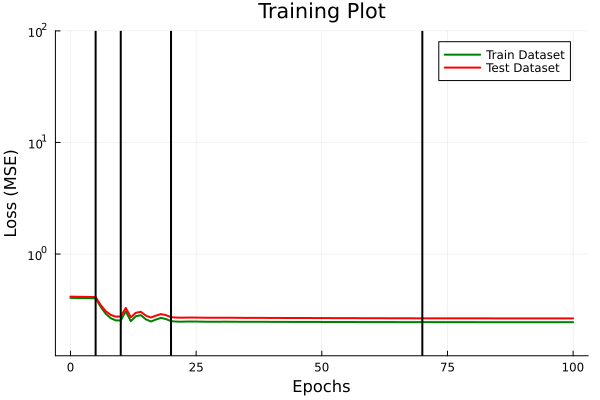
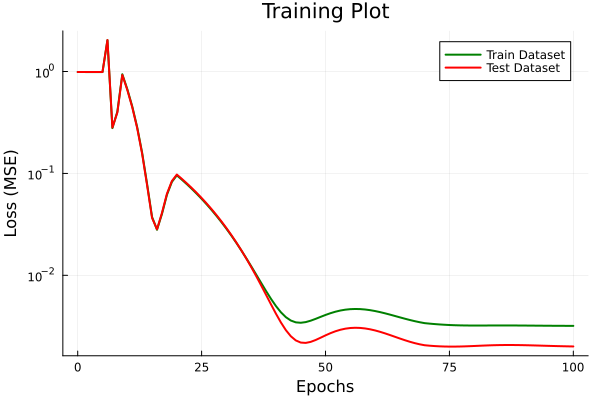
Full Experiment: \(-\nabla \cdot \nu \nabla u = f\)
Fourier Neural Operator
Pointwise DNN
- 48 parameters
- Single FNO spectral convolution layer
- \(R^2=0.987\) on test set
- 64k parameters
- Eight \(64\times64\) hidden layers
- \(R^2=0.07\) on test set
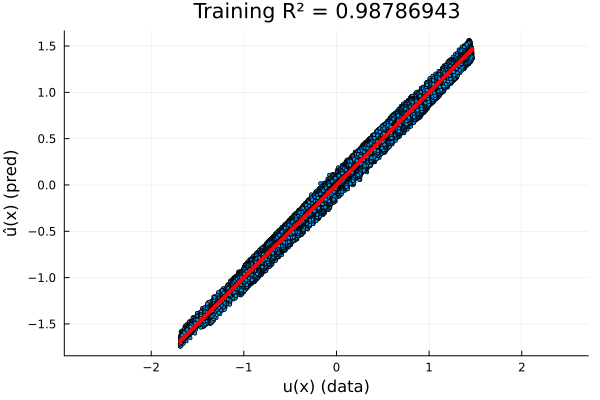
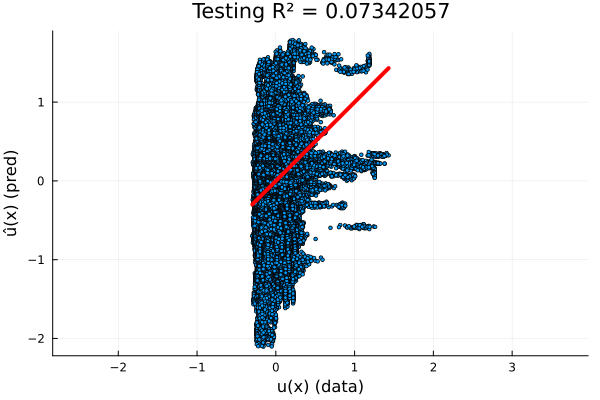
Full Experiment: \(-\nabla \cdot \nu \nabla u = f\)
Fourier Neural Operator
Pointwise DNN
Discussion
Disucssion
- Fourier Neural Operator implementation performs better than other tested models, and does so with fewer parameters.
Next Steps
- Test model splitting idea
- Network \(u_{\{\nu\},f_0}\) nonlinear in \(\nu\)
- Network \(u_{\{\nu\},f}\) nonlinear in \(\nu\), linear in \(f\)
- Develop bilinear neural operator layer!
Neural Operator
Operator Kernel
Operator Kernel
Bilinear
Operator Kernel
Affine
Linear
Bilinear Operator Kernel Layer
Bilinear Convolution Kernel
\( x^TWy\)
\(\mathcal{F}^{-1}(\widehat{x}^T W \widehat{y}) \)
Bilinear Local Kernel
Bilinear Operator Layer
- Single DNN for linear, nonlinear branches, with bilinear convolution layer for fusing results
- 300 parameters (mostly in the DNNs)
- \(R^2 = 0.997\) (test set)
Mechanical Engineering, Carnegie Mellon University
Advisors: Prof. Burak Kara, Prof. Jessica Zhang
Updates
Target Problem
Find (surrogate) map \( a \longrightarrow u \) that is
- Efficient, generalizes with sparse data
Updates
- Implement Fourier Neural Operator (FNO)
- Modified FNO model for linear PDEs (developed bilinear layer)
- Experiments with Bilinear layer
- (work in progress) experiment: parameter splitting
- (work in progress) backward pass for Discrete Cosine Transform (i.e. Chebyshev transform)
Next Steps
- Experiments becoming too large for my laptop - need machine with GPU
- Involve boundary conditions with Chebyshev transform
Neural Operator Kernel
Convolution Kernel
\( Wx\)
\(\mathcal{F}^{-1}W \widehat{x} \)
Local Kernel
Bilinear Neural Operator Layer
Operator Kernel
Operator Kernel
Bilinear
Operator Kernel
Affine
Linear
Bilinear Neural Operator Layer
Affine
Affine
Affine
Affine
Affine
Affine
Bilinear Operator Kernel
Bilinear Convolution Kernel
\( x^TW_\text{loc}y\)
\(\mathcal{F}^{-1}(\widehat{x}^T W_\text{conv} \widehat{y}) \)
Bilinear Local Kernel
Bilinear Operator Layer
- Single DNN for linear, nonlinear branches, with bilinear convolution layer for fusing results
- 300 parameters (mostly in the DNNs)
- \(R^2 = 0.997\) (test set)
Experiment Setup
-
Problem: Find map \((\nu,f) \longrightarrow u\)
-
Generate data with \( N = 128 \) point Fourier discretization
| # Trajectories | 100 | 100 | 32 x 32 |
| # Points | 12,800 | 12,800 | 131,072 |
Experiment Setup: \(-\nabla \cdot \nu \nabla u = f_0\)
Experiment Setup: \(-\nabla \cdot \nu_0 \nabla u = f\)
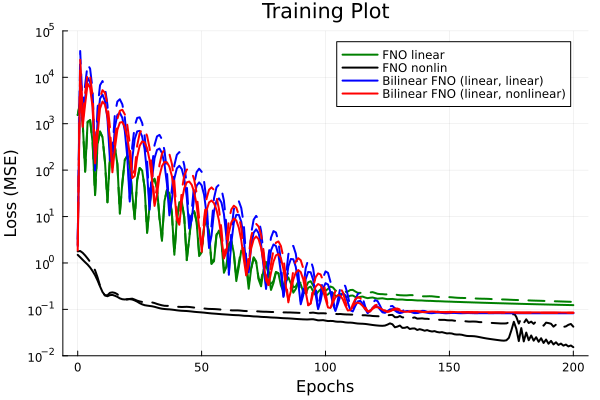
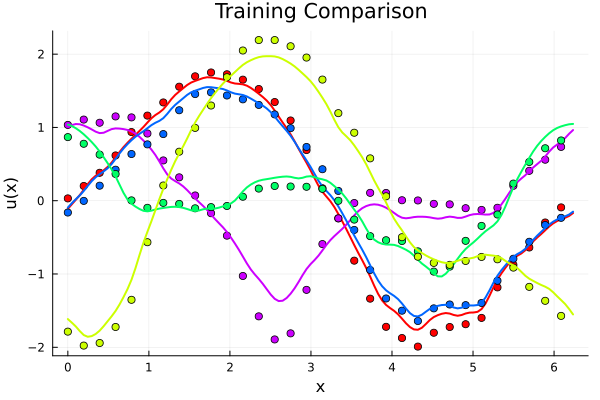
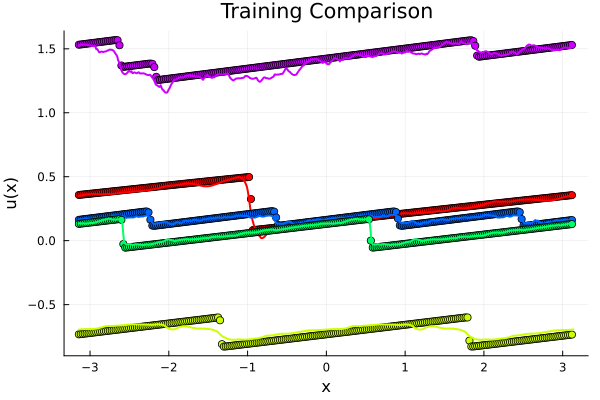
Experiment: \(-\nabla \cdot \nu \nabla u = f \)
Architecuters
- Nonlinear FNO
- Linear FNO
- Bilinear FNO (linear / linear)
- Bilinear FNO (linear / nonlinear)
[x, nu, f] -> BatchNorm() -> Dense(3 , w, tanh) -> OpKernel(w, w, m, tanh)
-> OpKernel(w, w, m, tanh) -> Dense(w , 1) -> u[x, nu, f] -> Dense(3 , w) -> OpKernel(w, w, m) -> Dense(w , 1) -> u[x, nu] -> BatchNorm(c) -> Dense(c, w, tanh), OpKernel(w, w, m) ↘
OpConvBilinear(w, w, m, 1) -> u
[f] -> Dense(c, w) ↗[x, nu] -> Dense(c, w), OpKernel(w, w, m) ↘
OpConvBilinear(w, w, m, 1) -> u
[f] -> Dense(c, w) ↗Experiment: \(-\nabla \cdot \nu \nabla u = f \)
- Linear FNO
- \(R^2 = 0.91, 0.92 \) (train/ test)
- Nonlinear FNO
- \(R^2 = 0.98, 0.97 \) (train/ test)
- Bilinear FNO (linear / linear)
- \(R^2 = 0.94, 0.95 \) (train/ test)
- Bilinear FNO (linear / nonlinear)
- \(R^2 = 0.94, 0.95 \) (train/ test)
Discusion
- Oscillations arise in linear models only
- Large gradients at training onset push parameter set far away from optimum
Next Steps
Workin on
- (work in progress) experiment: parameter splitting
- (work in progress) backward pass for Discrete Cosine Transform (i.e. Chebyshev transform)
Next Steps
- Experiments becoming too large for my laptop - need machine with GPU
- Involve boundary conditions with Chebyshev transform
TODO
- Compare results with literature for 1D diffusion (PDEBench), or 2D bench + Darcy flow
- Lit review on ML optimization dynamics
- Implement using julia because... (justify choice of platform)
- Run on PSC Bridges
- What are the novel contributions? 1 page
Parameter Splitting
- Network \(u_{\{\nu\},f_0}\) nonlinear in \(\nu\)
- Network \(u_{\{\nu\},f}\) nonlinear in \(\nu\), linear in \(f\)
Train on \(N_\nu\cdot N_f\) trajectories
Train on \(N_\nu\)
trajectories
Mechanical Engineering, Carnegie Mellon University
Advisors: Prof. Burak Kara, Prof. Jessica Zhang
Updates
Target Problem
Find (surrogate) map \( (x, a, f, g, \dotsc) \longrightarrow u \)
- Efficient, generalizes with sparse data
So Far ( ~ 1/3 of the way there)
- Experimented with Neural Operator models in 1D
- Discussed parameter splitting idea for linear PDEs
- Modified operator model to respect linearity (superior generalizability over some parameters)
Next Steps
- Extend to 2D
- Involve Boundary Conditions
- Test against benchmarks
\(N_a\) samples
\(N_a\cdot N_g\) samples
\(N_a\cdot N_f\) samples
Neural Operator Layer
Convolution Kernel
\( W_\text{loc}x+b\)
\(\mathcal{F}^{-1}W_\text{conv} \widehat{x} \)
Local Kernel
@tullio Y_conv[co, m, b] := W_conv[co, ci, m] * X[ci, m, b]@tullio Y_loc[co, n, b] := W_conv[co, ci] * X[ci, n, b]Bilinear Operator Layer
Bilinear Convolution Kernel
\( x^TW_\text{loc}y\)
\(\mathcal{F}^{-1}(\widehat{x}^T W_\text{conv} \widehat{y}) \)
Bilinear Local Kernel
@einsum Z_conv[co, m, b] := X[c1, m, b] * W_conv[co, c1, c2, m] * Y[c2, m, b]
@einsum Z_loc[co, n, b] := X[c1, n, b] * W_loc[co, c1, c2] * Y[c2, n, b]
Modified Neural Operator Model
Operator Kernel
Operator Kernel
Bilinear
Operator Kernel
Affine
Linear
Experiment: \(-\nabla \cdot \nu \nabla u = f\)
Modified FNO
Classic FNO
- 16k parameters
- Convolution bilinear layer
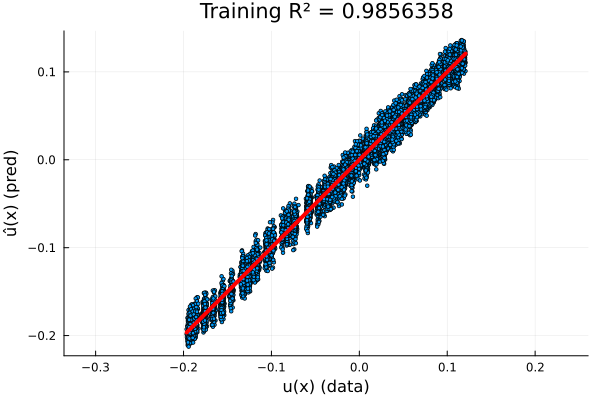
- \(R^2=0.97\) on training set
- 25k parameters
- \(R^2=0.98\) on training set
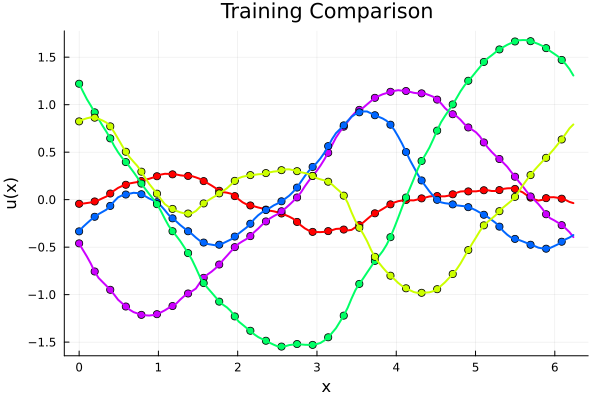
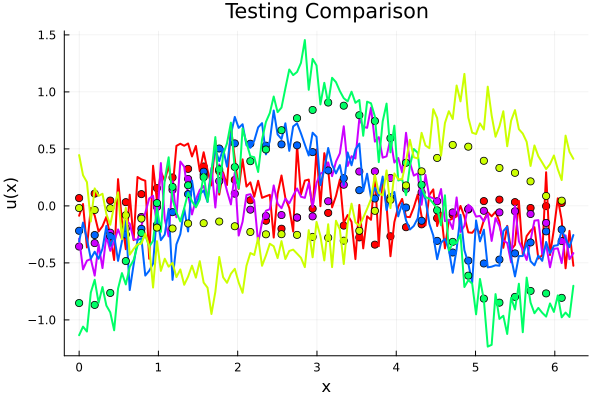
Hypothesis: Modified model should generalize better on out-of-distribution data
Experiment: Introduce random scales in test set by multiplying with envelop function \(e^{k\sin(\lambda x - \mu)} \)
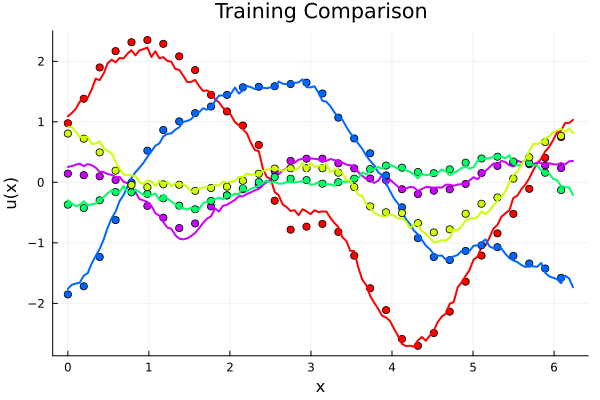
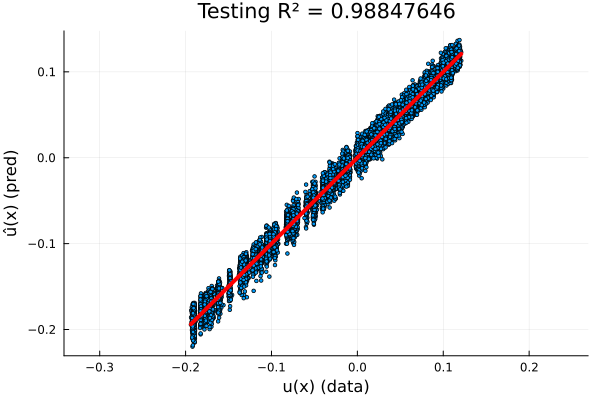
Experiment: \(-\nabla \cdot \nu \nabla u = f\)
Modified FNO
Classic FNO
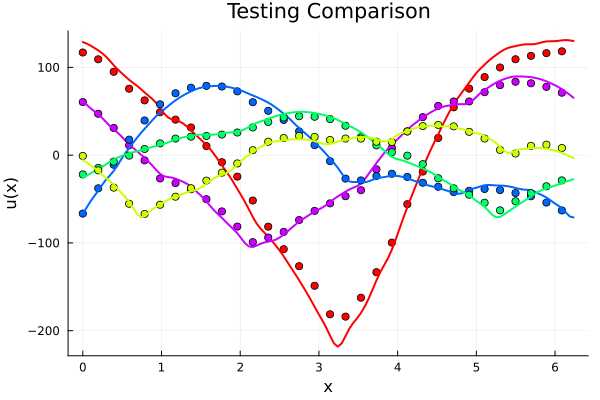
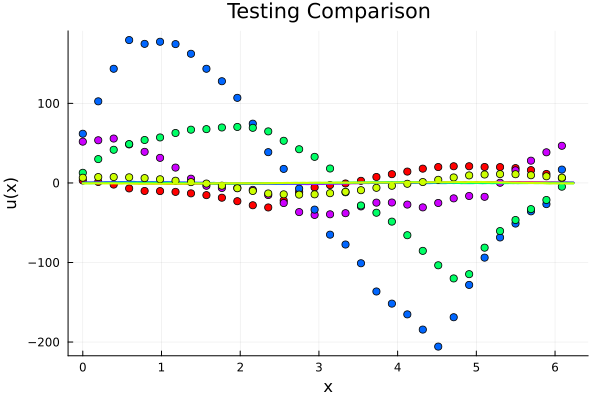
- \(R^2=0.97\) on test set
- \(R^2=0.002\) on test set
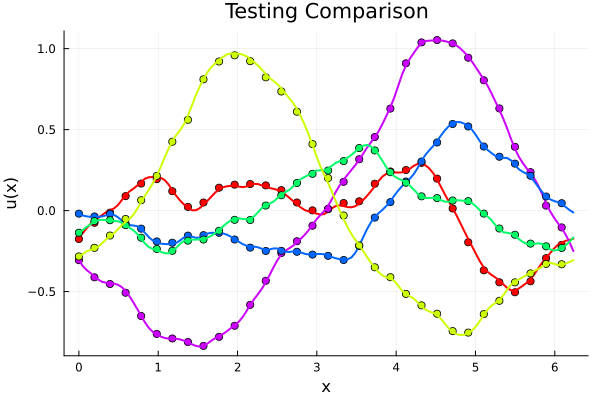
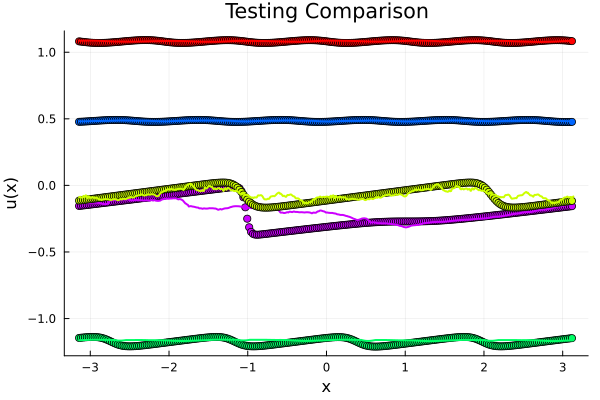
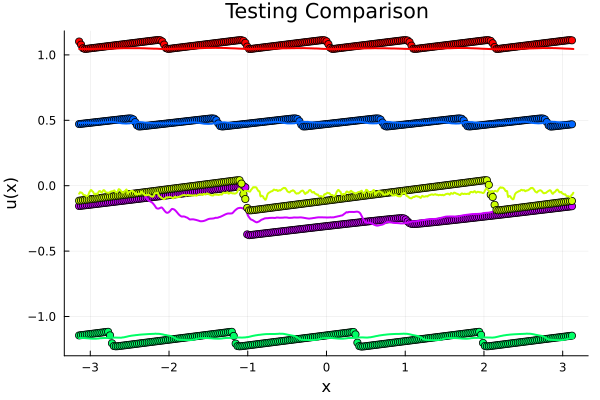
Experiment: \(-\nabla \cdot \nu \nabla u = f\)
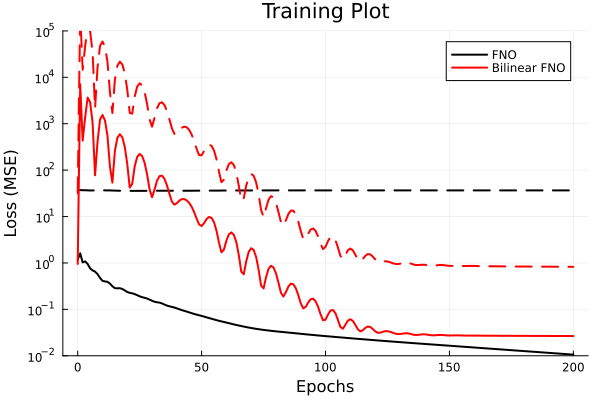
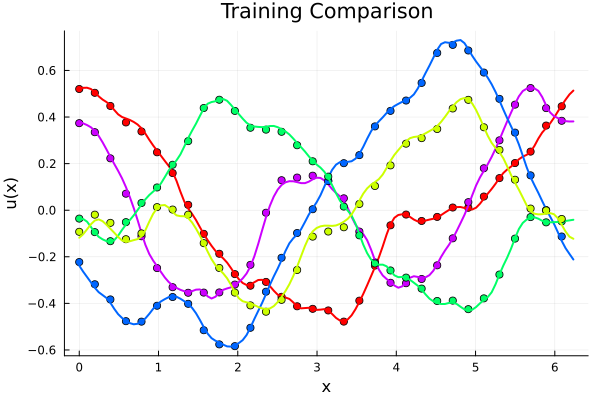
Solid line -> training set, Dashed line -> test set
Discussion
- Modified architecture guarantees linearity in \(f\)
- Training on \(\{f_i\}_{i=1}^K\), model learns solution for all \(\Sigma_{i=1}^K \alpha_i f_i \).
- Optimal choice for \( f_i \): first \(K\) Fourier basis functions because they are orthonormal
- Consider \( \mathrm{NN}(\nu, f) = \underline{\underline{\mathrm{NN}(\nu)}}\cdot f\) (matrix-vector product).
- Then \(\underline{\underline{\mathrm{NN}(\nu)}}\) is a low rank approximation of inverse PDE operator with rank \(K\) (if \(f_i\) orthogonal).
Disucssion
- Superior generalizability with sparse data can be achieved by tuning architecture to PDE.
- Question: To what extent are we interested in tuning architectures to specific PDEs?
-
Question: Should we write specialized models for other PDEs:
- Poisson, Helmholtz, Advection, etc
- Question: What is the utility of low rank approximation to inverse operator? Need to lit review.
Next steps/ work in progress
To run 2D problems
- Make code CUDA compatible - nearly done
- Write a data-loader as GPUs have limited memory
To involve boundary conditions
- Write Boundary Value Problem solver to generate data
- Write backward ward pass for Discrete Cosine Transform (Chebyshev transform) - done
- Write GPU compatible version of Discrete Cosine Transform
Mechanical Engineering, Carnegie Mellon University
Advisors: Prof. Burak Kara, Prof. Jessica Zhang
Updates
Target Problem
Find (surrogate) map \( (x, a, f, g, \dotsc) \longrightarrow u \)
- Efficient, generalizes with sparse data
So Far ( ~ 1/3 of the way there)
- Neural Operator 1D/ 2D models
- Benchmarks (1D advection, 2D Darcy flow, 1D/2D Poisson, 1D burgers)
- Discussed parameter splitting idea for linear PDEs
Next Steps
- Do validation in 2D
- Involve Boundary Conditions
Validating FNO model: \((\partial_t - \partial_x) u = f\)
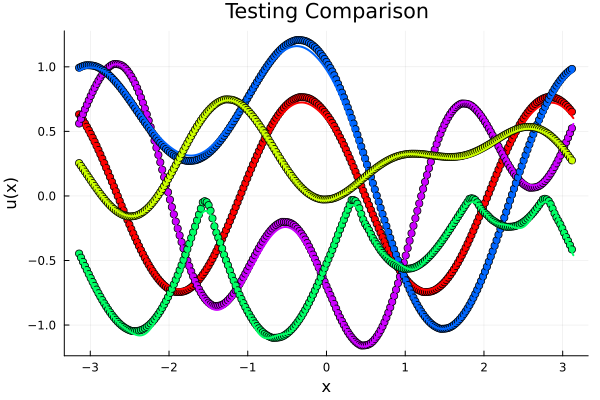
- \(70k\) parameters
- 4x Operator Layers \( 32 \times 32\), \(16\) modes
- Train/test \(R^2=0.998\), MSE \(10^{-3}\)
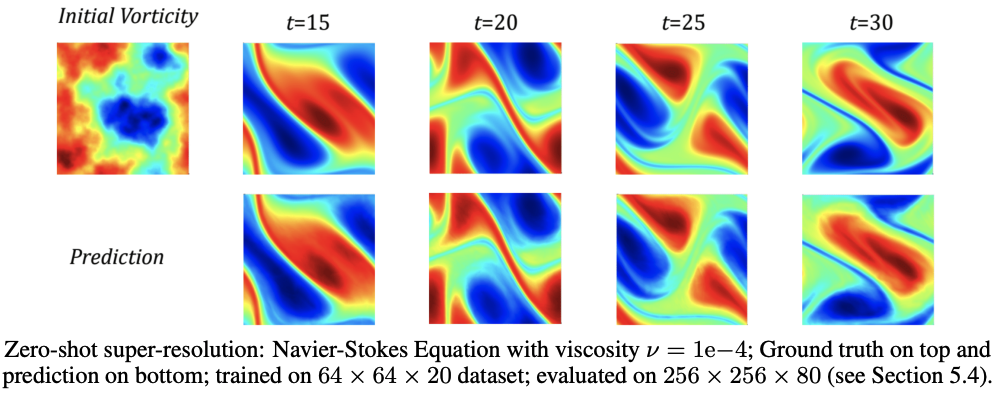
Validating FNO model: \(\partial_t + u\partial_x u = \nu\Delta u\), \( \nu = 10^{-2}\)
\(198k\) parameters, 6x Operator Layers \( 16 \times 16\), \(128\) modes
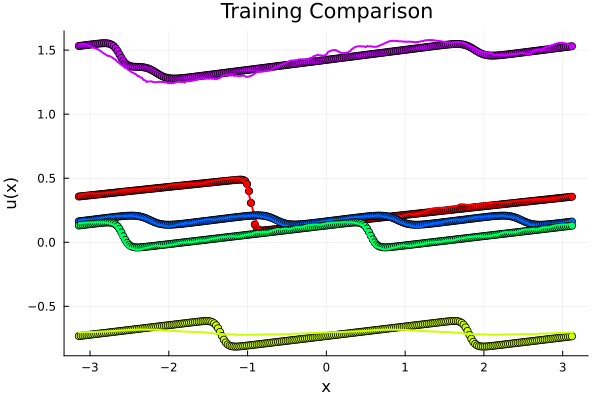
R² score: 0.9982961
MSE (mean SQR error): 0.00057452
RMSE (root mean SQR error): 0.02396922
MAE (mean ABS error): 0.01535009
R² score: 0.9795042
MSE (mean SQR error): 0.00701486
RMSE (root mean SQR error): 0.08375475
MAE (mean ABS error): 0.05496668
Validating FNO model: \(\partial_t + u\partial_x u = \nu\Delta u\), \( \nu = 10^{-2}\)
\(198k\) parameters, 6x Operator Layers \( 16 \times 16\), \(128\) modes
R² score: 0.9975712
MSE (mean SQR error): 0.00079163
RMSE (root mean SQR error): 0.02813594
MAE (mean ABS error): 0.01866633
R² score: 0.9755317
MSE (mean SQR error): 0.00802541
RMSE (root mean SQR error): 0.08958465
MAE (mean ABS error): 0.06163863
Involving Boundary Conditions
Why
- Want to solve BVPs in changing geometries
TO DO
- Utilize an isoparametric mapping to deform box mesh to generate geometries
- Generate boundary value problem data in varying geometries
- Extend Fourier Neural Operator to use Chebyshev transform
- Test parameter splitting idea -------------------->
\(N_a\) samples
\(N_a\cdot N_g\) samples
\(N_a\cdot N_f\) samples
Mechanical Engineering, Carnegie Mellon University
Advisors: Prof. Burak Kara, Prof. Jessica Zhang
Logistics: Classes
- 4/8 done (need 2 MechE courses + math req)
- Classes (Fall 2023)
- 15-213: Introduction to Computer Systems (freshman level course - pre-req to most CS classes)
- 15-860: Monte Carlo Methods (taught by Keenan Crane)
- Would prefer to switch to: 24-703 (Prof. Zhang)/ 24-787 (Prof. Kara)
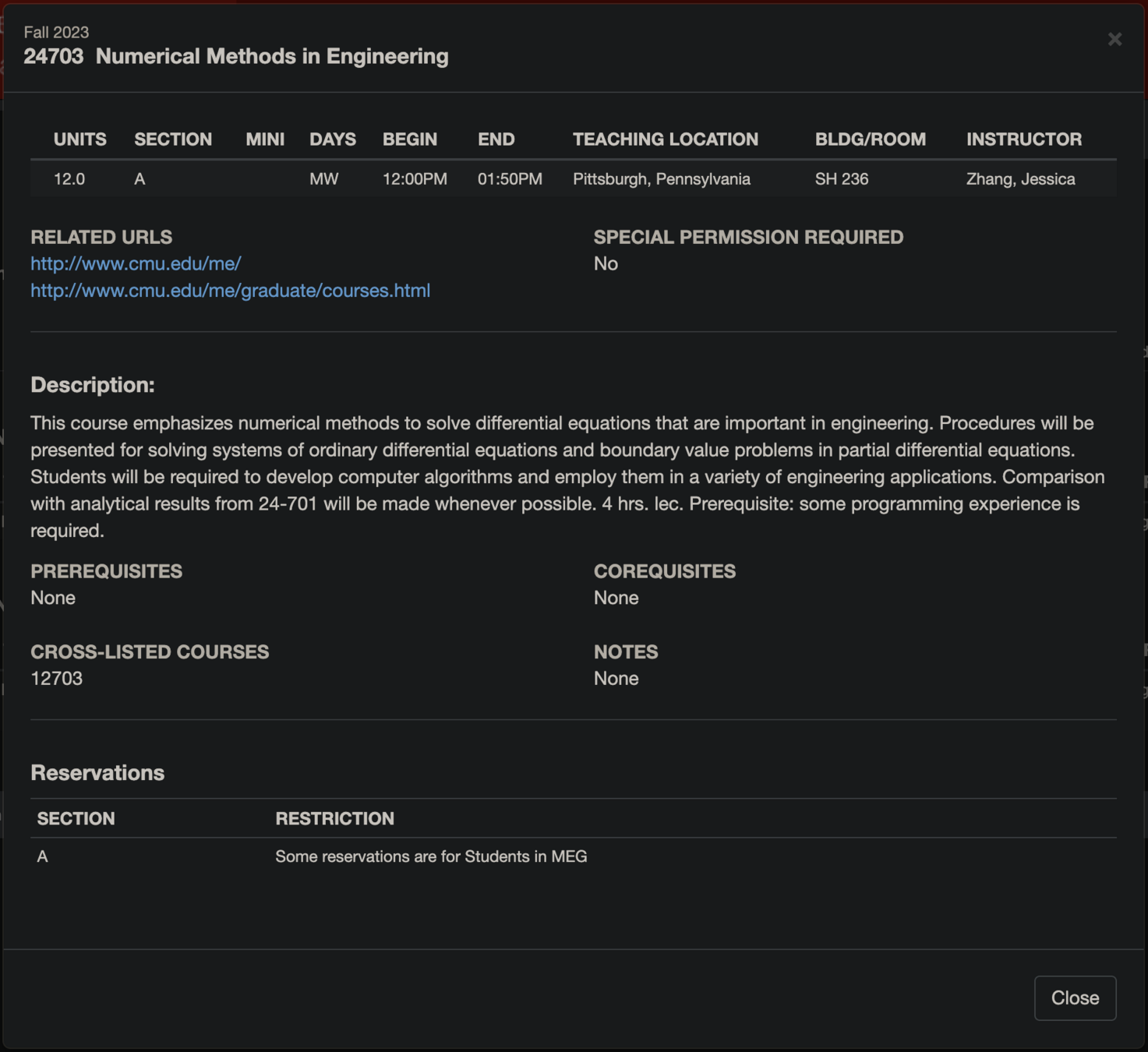
24-703: Numerical Methods in Engineering
24-787: Machine Learning and AI for Engineers
15-860: Monte Carlo Methods and Applications

15-513: Introduction to Computer Systesm
Logistics: Computer
- Need to return laptop to Venkat before fall semester starts
- Prof. Kara has offered to buy a laptop, Prof. Zhang, a desktop
- Requirements: CPU (16+ cores) + GPU (12+ GB RAM)
- Would prefer laptop as both labs have remote machines
- If workstation/server is preferable, happy to buy my own laptop
Updates
Target Problem
Find surrogate map \(p = (x, a, f, g, \dotsc) \longrightarrow u \) for BVP
So Far
- 1D/ 2D Fourier Neural Operator with periodic BC, uniform grids
Earlier Proposal
- Involve boundary conditions with convolutions over \( \partial\Omega\)
- Extend to complex geometry with isoparametric mapping
- Equation specific modifications (split training, bilinear layer)
- Restricted to structured grids...
Literature Review
- Extend to unstructured grids
Neural Operators and Green's functions
For PDE \( \mathcal{L}(u) = f, \, x \in \mathbb{R}^d \), the Green's function \(G(x; y)\) solves
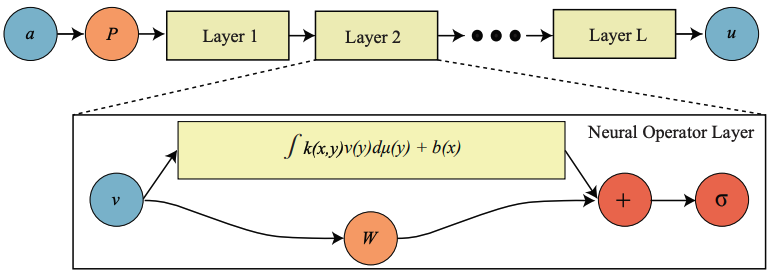
Neural Operator models approximate the Green's function. Each layer performs the following operation
Eg, the Fourier Neural Operator
where \(\mathcal{F}\) is the Fourier transform
Neural Operators are grid independent
\(G^6 \leftarrow G^3 \) interpolation
Neural Operators parameterize the model in a latent space that can be interpolated to any grid
Spectral Neural Operator is an architecture that learns a model in spectral space
Spectral expansion and transform
orthonormal basis
transform matrix
Spectral expansion and transform
Orthogonal WRT inner product on \( C(\mathbb{R}) \)
(Classical Orthogonal Polynomials)
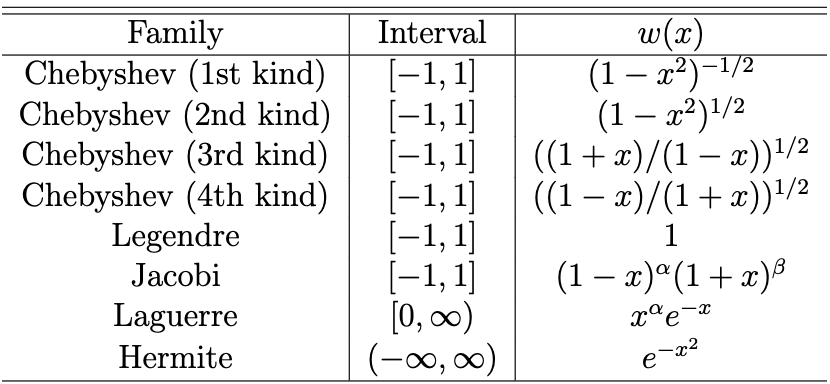
On \(S_1 = \{|z| =1, \, z \in \mathbb{C} \} \) (Fourier) and weight \( w(z) = 1\), we get \( \exp{(ikx)}, \, k\in\mathbb{N}\) on interval \( [0, 2\pi) \)
Many properties (Sturm-Louisville, convolution...)
Proposed model with boundary convolutions
Based on Green's function solution to BVP
Eg, Poisson equation, \(L(u) = \Delta u \)
Proposed model layers involve boundary information with convolutions
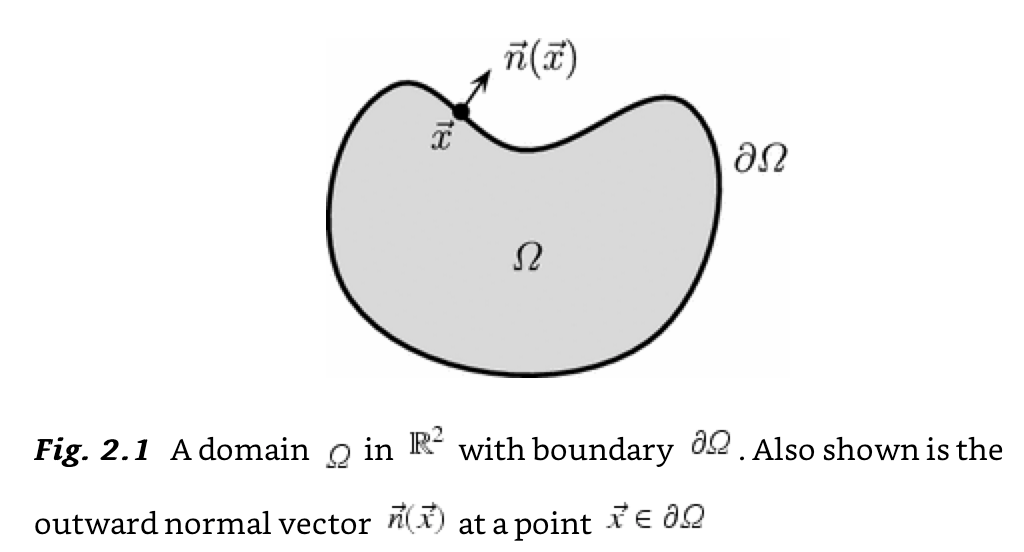
Model can train on multiple geometries (generated by deforming a fixed spectral patch)
Neural Operators on Unstructured Grids
Spectral expansions are defined on simple grids (boxes, triangles, circles, tensor products) and deformations. Challenge is to find a spectral expansion on general meshes.
One approach is to preselect a basis. For a meshed domain, \( \Omega\), precompute the first \(K\) eigenfunctions of the Laplacian, \( \Delta \phi = \lambda \phi \)
Then, employ the Spectral Neural Operator model (Laplace Neural Operator)
This model is resolution independent, as the eigenfunctions can be interpolated to any mesh, but does not generalize to new geometries.
- Learn a spectral transformation on a general grid
- At the end of the day, the transform is just an invertible operation
- For FNO, it is simply a matrix
- Can we learn an invertible operation and use it in the operator layers?
-
Implicit Neural Representations (INRs) for operator learning
- INRs can be used to learn mappings from a general geometry to a latent space
- INRs model input as output of an implicit function \( p = \mathrm{NN}_\theta(x) \)
- Two step process:
- learn forward/backward mapping - utilize
- train deep neural network in latent space
Neural Operators on Unstructured Grids
Mechanical Engineering, Carnegie Mellon University
Advisors: Prof. Burak Kara, Prof. Jessica Zhang
Overview
Target Problem:
- Find (surrogate) map \( (x, a, f, g, \dotsc)\longrightarrow u \)
- in complex geometries, with varying boundary conditions
Work Done till Now
- Implemented neural operator models
- Literature review
Talking to
- Aviral Prakash, post-doc w. Prof. Zhang
- works on turbulence reduced order modeling
- Kevin Ferguson, PhD student w. Prof. Kara
- works on surrogates on meshes
Landscape of ML for PDEs
Mesh-based
PDE-Based
Neural Ansatz
Data-driven
FEM, FVM, IGA, Spectral
Fourier Neural Operator
Implicit Neural Representations
DeepONet
Physics Informed NNs
Convolution NNs
Graph NNs
Adapted from Núñez, CEMRACS 2023
Deep Galerkin
Neural ODEs
Universal Diff Eq
Hybrid Phys/ML
Landscape of ML for PDEs
Mesh-based
PDE-Based
Neural Ansatz
Data-driven
FEM, FVM, IGA, Spectral
Fourier Neural Operator
Implicit Neural Representations
DeepONet
Physics Informed NNs
Convolution NNs
Graph NNs
Adapted from Núñez, CEMRACS 2023
Deep Galerkin
Neural ODEs
Universal Diff Eq
Hybrid Phys/ML
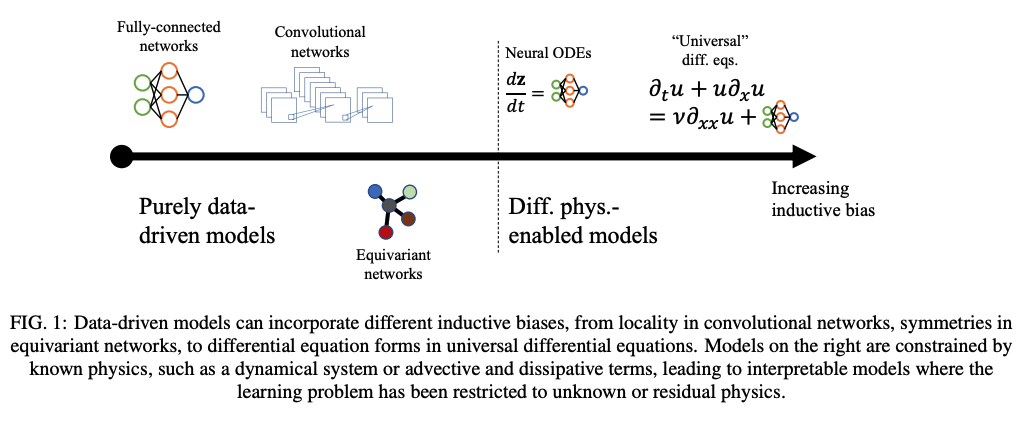
Universal Differential Equations
Motivation
- Learning requires large data, unavailable in scientific domains
- Data in physics models is available in form of differential equations
- PDE models extrapolate better than purely learned surrogates
Mix ML with PDE solvers:
- Involve PDE biases in ML model \(\iff\) learn unknown PDE params with ML
Application
- Learn correction to physics simulation with data (eg closure modeling)
- Closure modeling, reduced order modeling
Universal Differential Equations
Universal Diff Eq Example: Closure Modeling
Closure Model
Eddy Viscosity Model
Vanilla Neural Network
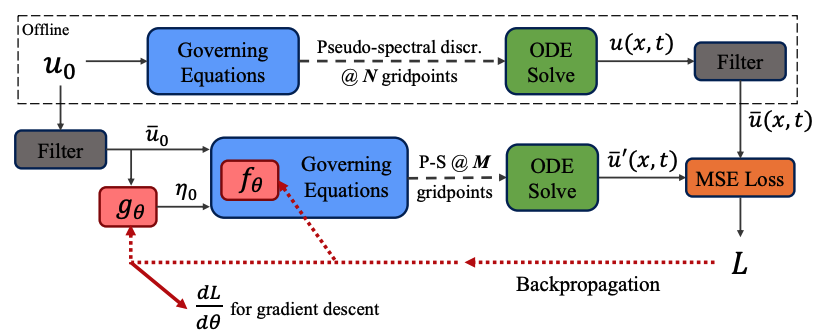
The algorithmic backbone of this method is the interpolating adjoint method for backpropagating through ODE solve
UDEs need ML to the simulation pipeline
Mesh
\(A\underline{u} = M\underline{f} \)
Domain
Governing Equation
Boundary Constraint
\( NN_\theta \)
Discretization
\( \dfrac{d}{dt} \underline{u} = f(\underline{u}) \)
Solving
Discrete Problems
\(u(\underline{x},t) \)
\(u(\underline{x}) \)
Solution
Loss
Backpropogation
Data
\( NN_\theta \)
\( NN_\theta \)
Linear Solver
Time-Stepper
Landscape of ML for PDEs
Mesh-based
PDE-Based
Neural Ansatz
Data-driven
FEM, FVM, IGA, Spectral
Fourier Neural Operator
Implicit Neural Representations
DeepONet
Physics Informed NNs
Convolution NNs
Graph NNs
Adapted from Núñez, CEMRACS 2023
Deep Galerkin
Neural ODEs
Universal Diff Eq
Hybrid Phys/ML
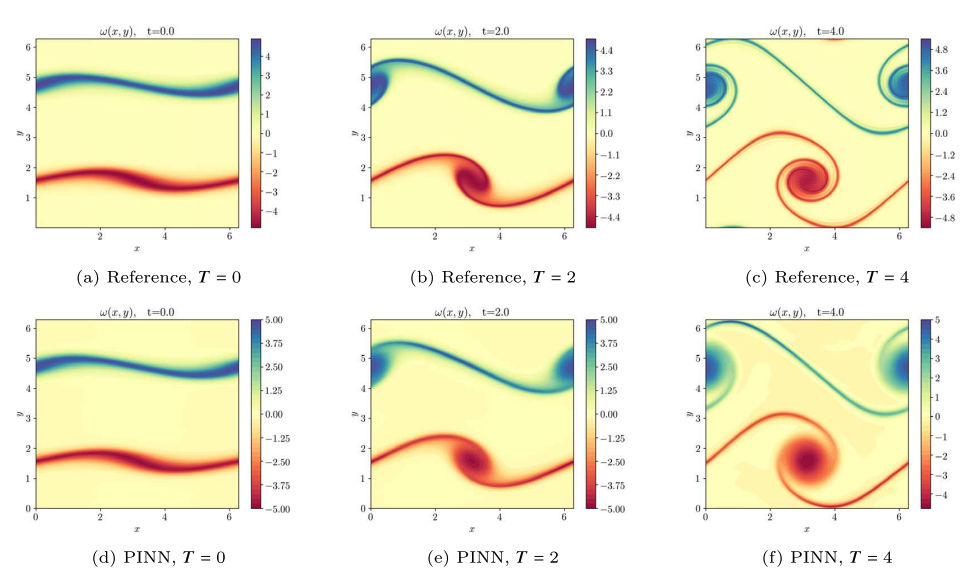
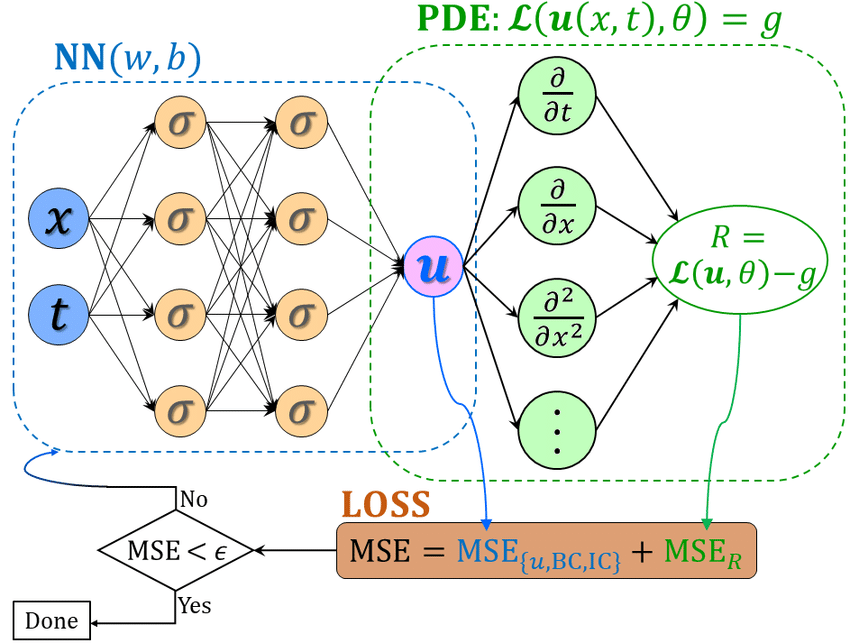
PINNs: Physics Informed Neural Networks
- Replace PDE solver with a neural network
- Automated PDE solving - just need to type in equation
- No data gen, no solver, no mesh
- Just set up model and run

PINNs: Physics Informed Neural Networks
- Replace PDE solver with a neural network
- \( u = \mathrm{NN}_\theta(x, t)\) (neural ansatz)
- Overfit a network to PDE by minimizing
- Trained by minimizing PDE residual (LHS-RHS) at sample points
- Kind of like collocation on (randomly) select points in domain
- Residual computed via automatic differentiation (exact)
PINNs: Physics Informed Neural Networks
Advantages
- Automated methodology, no prior data required
- If data available, just add it to loss function!
- Small networks are able to do a good job
- In principle, mesh free. Need domain points for discretizing loss function but no topology required
PINNs: Physics Informed Neural Networks
Challenges
- Struggle with large/complex domains, multiscale solutions. Both require many sample points
- Need extra sampling at boundaries to enforce BC
- Hard to train (loss landscape depends on PDE, \(\lambda_i\), IC/BC add constraints to optimization problem)
PINNs: Physics Informed Neural Networks
Many variants out there
- HyperPINNs: Mixing PINNs with hyper networks
- BayesianPINNs: estimate uncertainty in PDE solution
- Deep Ritz/ Deep Galerkin: Minimize Galerkin residual in place of collocation
- Use convolution/ graph network architecture to minimize physics loss
- XPINN: (domain decomposition approach) train separate PINNs in subdomains
- In principle, physics loss can be included in any ML model
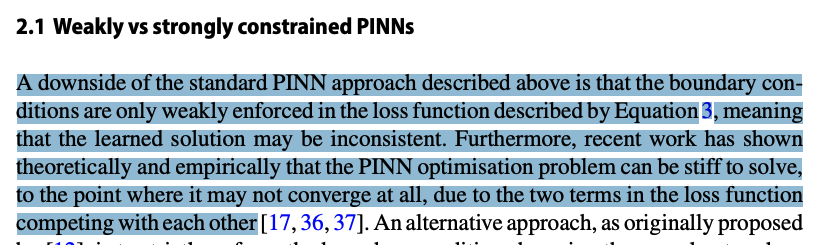
However, key problems persist
- Soft imposition of IC/BC via loss function lead to insufficient accuracy, unnecessary training effort
- Hard to train
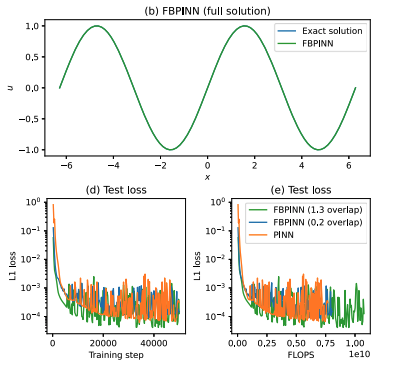
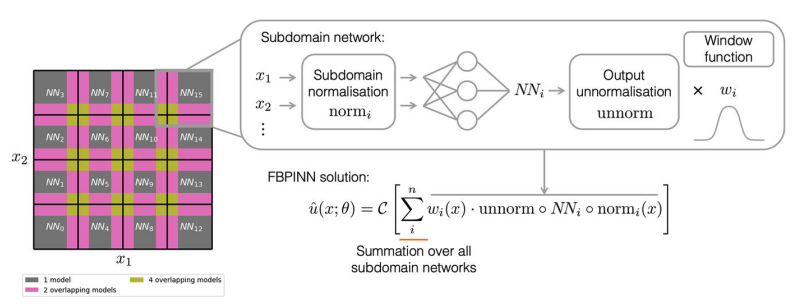
PINNs: Domain Decomposition
Finite Basis PINNs, 2023

PINNs: Multi-stage Training
- Divide training into stages
- Train model on data
- \(\longrightarrow\) train new model to capture error
- \(\longrightarrow\) repeat
- Incremental networks capture higher frequency modes
- Kind of like multigrid method
Jul 2023
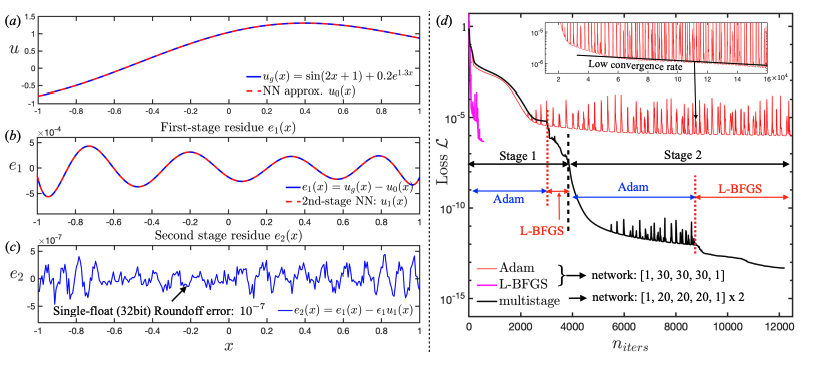
PINNs: Multi-stage Training
Landscape of ML for PDEs
Mesh-based
PDE-Based
Neural Ansatz
Data-driven
FEM, FVM, IGA, Spectral
Fourier Neural Operator
Implicit Neural Representations
DeepONet
Physics Informed NNs
Convolution NNs
Graph NNs
Adapted from Núñez, CEMRACS 2023
Deep Galerkin
Neural ODEs
Universal Diff Eq
Hybrid Phys/ML
Landscape of ML for PDEs
Mesh-based
PDE-Based
Neural Ansatz
Data-driven
FEM, FVM, IGA, Spectral
Fourier Neural Operator
Implicit Neural Representations
DeepONet
Physics Informed NNs
Convolution NNs
Graph NNs
Adapted from Núñez, CEMRACS 2023
Neural ODEs
Universal Diff Eq
Mechanical Engineering, Carnegie Mellon University
Advisors: Prof. Burak Kara, Prof. Jessica Zhang
Landscape of ML for PDEs
Mesh-based
PDE-Based
Neural Ansatz
Data-driven
FEM, FVM, IGA, Spectral
Fourier Neural Operator
Implicit Neural Representations
DeepONet
Physics Informed NNs
Convolution NNs
Graph NNs
Adapted from Núñez, CEMRACS 2023
Neural ODEs
Universal Diff Eq
Hybrid Phys/ML
Generative Models??
Landscape of ML for PDEs
| Model | Target Problem | Methodology/ Limitation | Input/ Output |
|---|---|---|---|
| UDE | Learn unknown physics from data | Differentiate through PDE solve to learn unknown params FWD pass: solve PDE w. FEM/spectral with added NN term BWD pass: (adjoint method) run sim in reverse to get sensitivities |
Learn to match with data by solving |
| PINN | Replace solver with black-box NN | (Non-parametric model) learn PDE solution for fixed parameters p by overfitting NN with PDE residual + IC/BC loss + data. Very hard to train. | Evaluate at sampled points in |
| CNN/GNN | Learn parametric from mesh data |
Utilize domain mesh/grid structure to learn sparse convolutions. Grid-to-grid model. Limited to predicting on training grid. |
Evaluate on grid |
| FNO | Learn parametric solution operator for PDE from data + PDE loss | Learn params in Fourier space (resolution independent). Architecture: pointwise evals + global convs. Function-to-function model, but limited to uniform grids |
Evaluate on uniform grid of any res. |
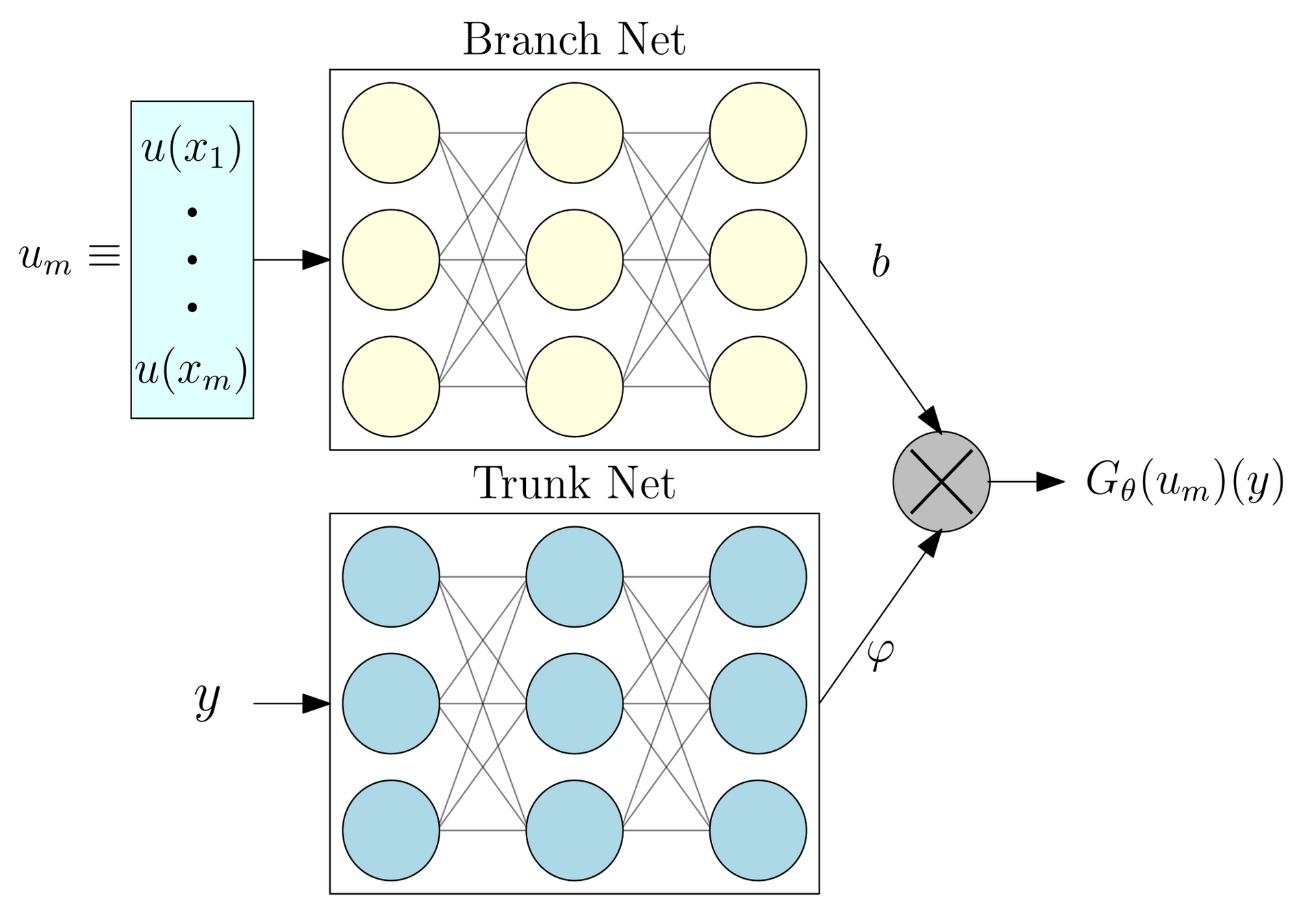
| DeepONet | Learn parametric over from fixed sensors locations. Loss PDE + data |
Mimics PDE solve in NN. Linear combination of - learned basis functions spanning from fixed sensor points - learned scaling coefficients for basis Function-to-function model |
For fixed sensor points and arbitrary , |
Operator learning: continuous analog of supervised learning
- \(\implies\) can evaluate anywhere in \(\Omega\)
- \(\implies\) prediction quality grid independent
- \(\implies\) discretization convergent
FNO vs CNN
Both are grid-to-grid model
Fourier transform / convolution equivalent (conv. theorem). For signal \(f\), filter \(g\)
Input
\( C_{i} \times Nx \times Ny\)
Model
Output
\( C_{o} \times Nx \times Ny\)
- CNN learns local (\(2\times2\)) filter \(g\)
-
FNO learns \( 32 \times 32\) filter freqs, \(\mathcal{F}(g)\).
- Filter is local in Fourier space \(\iff\) global in mode space
- Global filter implemented with FFT (doesn't care about resolution)
FNO vs Convolution Networks
| Fourier Neural Operator | Convolution Neural Network | |
|---|---|---|
| Target problem | Function-to-function mapping | Grid-to-grid mapping |
| Methodology | - Pointwise ops (MLP/ 1x1 conv) capture local features - Global convolutions capture global info (learned in Fourier space) |
Learn local convolution filters |
| Continuity | Input/output continuous function (can be evaluated anywhere) In practice, sampled on uniform grids. |
Input/output are data on uniform grids |
| Resolution dependence | Performance comparable when evaluated on finer grids. | Performance degrades on finer/coarser grids than training grid. |
| Evaluate on finer grids | Can evaluate on any grid High-frequency features (not present on training grid) can be captured. |
Downsample --> evaluate --> Interpolate Loses high-frequency features |
DeepONet
FNO vs DeepONet
| Fourier Neural Operator | DeepONet | |
|---|---|---|
| Target problem | Function-to-function mapping | Function-to-function mapping |
| Methodology | ||
| Continuity | ||
| Interpolation | ||
| Resolution dependence | ||
FNO vs Convolution Networks
Differences
- FNO is a continuous model, CNN discrete
- FNO can be evaluated on uniform grids of any resolution (in principle)
- FNO learns model in Fourier space
- Every layer has FFT which is global operation (like transformer)
- Inverse Fourier transform adds Fourier features to every layer
- CNN can be evaluated on denser grids but only with subsampling
- CNN performance degrades on different resolutions
Lifting Op
Linear transform on first \(K\) Fourier modes
Local linear transform
Projection Op
FNO Working
#==============================#
# Lifting
v [Cv, Nx, Ny] <- P [Cp, Ca] * a [Ca, Nx, Ny]
#==============================#
# Fourier layer
## local
w1 [Cw, Nx, Ny] <- W_loc [Cw, Cv] * v [Cv, Nx, Ny]
## modal
vh [Cv, Kx, Ky] <- FFT * v [Cv, Nx, Ny] # Transform
vh [Cv, Mx, My] <- Trunc * vh[Cv, Kx, Ky] # Truncation
wh [Cw, Mx, My] <- R [Cw, Cv, Mx, My] * vh [Cv, Mx, My]
wh [Cw, Kx, Ky] <- ZeroPad * wh [Cw, Mx, My] # Zero Pad
w2 [Cw, Nx, Ny] <- iFFT * v [Cv, Kx, Ky] # iTransform
w = w1 + w2
#==============================#
# Projection
u [Cu, Nx, Ny, B] <- Q [Cu, Cw] * a [Cw, Nx, Ny, B]Lifting Op
Linear transform on first \(K\) Fourier modes
Local linear transform
Projection Op
# Modal operation in Fourier Layer
wh [Cw, Mx, My] <- R [Cw, Cv, Mx, My] * vh [Cv, Mx, My]
## in index notation:
wh[cw, mx, my] <- W_mod [cw, cv, mx, my] * vh [cv, mx, my]
# contraction in cv
# elementwise mult in mx, my
Updates 9/18/23
- Discussions on Neural Operator (w. Prof. Kara)
- Figure out what is novel in architecture (by comparison with CNNs)
- Find areas of improvement/ new application
- Possible applications
- PDE solvers for complex geometry, changing boundary conditions
- Reduced Order Modeling (w. Aviral)
- Use ML models for dimensionality reduction in fluid flow problems
- Current approaches use autoencoders, neural fields
- Can we involve operator models?
- Paper snapshot (title + authors). What does it claim to do?
- Methodology: how does it do it?
- Novelty: what is novel? methodology? use case?
- Future directions?