SNF-ROM: Projection-based nonlinear reduced order modeling with smooth neural fields
JUL 22, 2024
Vedant Puri, Aviral Prakash, Levent Burak Kara, Yongjie Jessica Zhang
Mechanical Engineering, Carnegie Mellon University

Motivation: accelerate PDE solvers

1
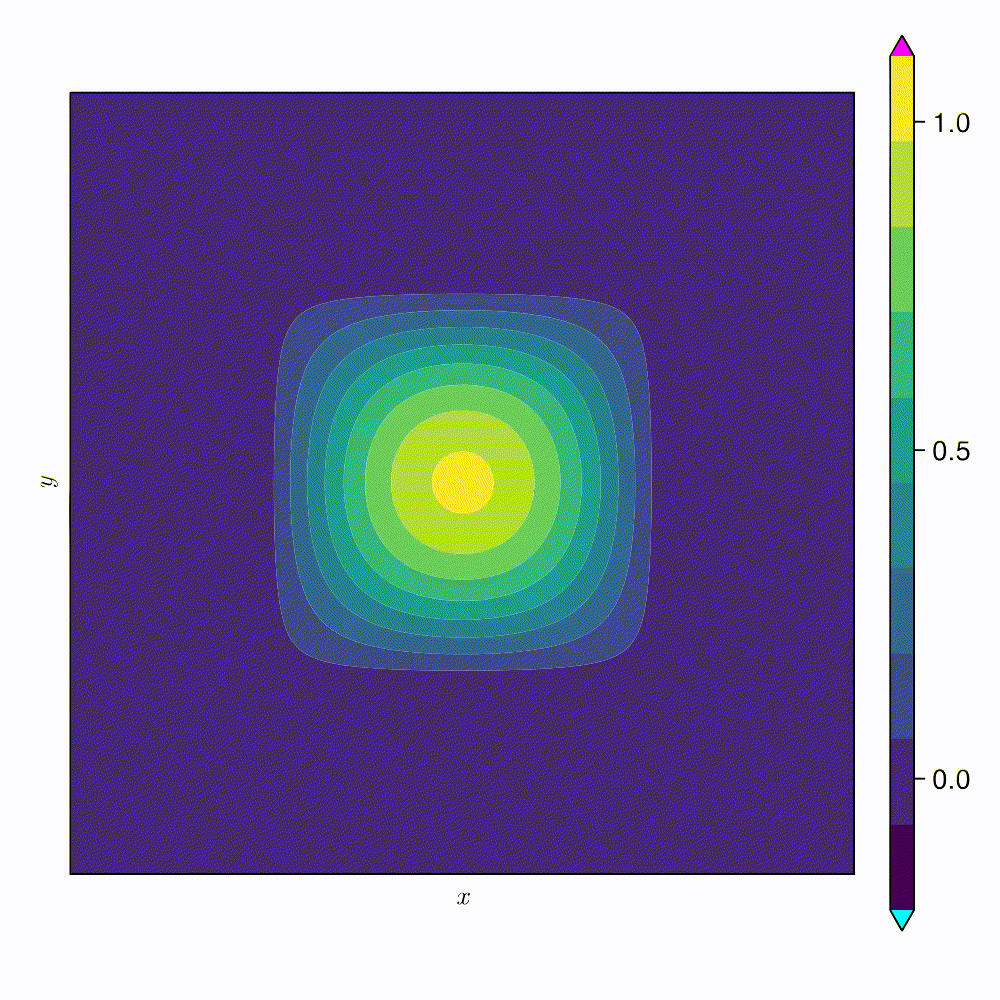
2D Viscous Burgers problem \( (\mathit{Re} = 1\text{k})\)
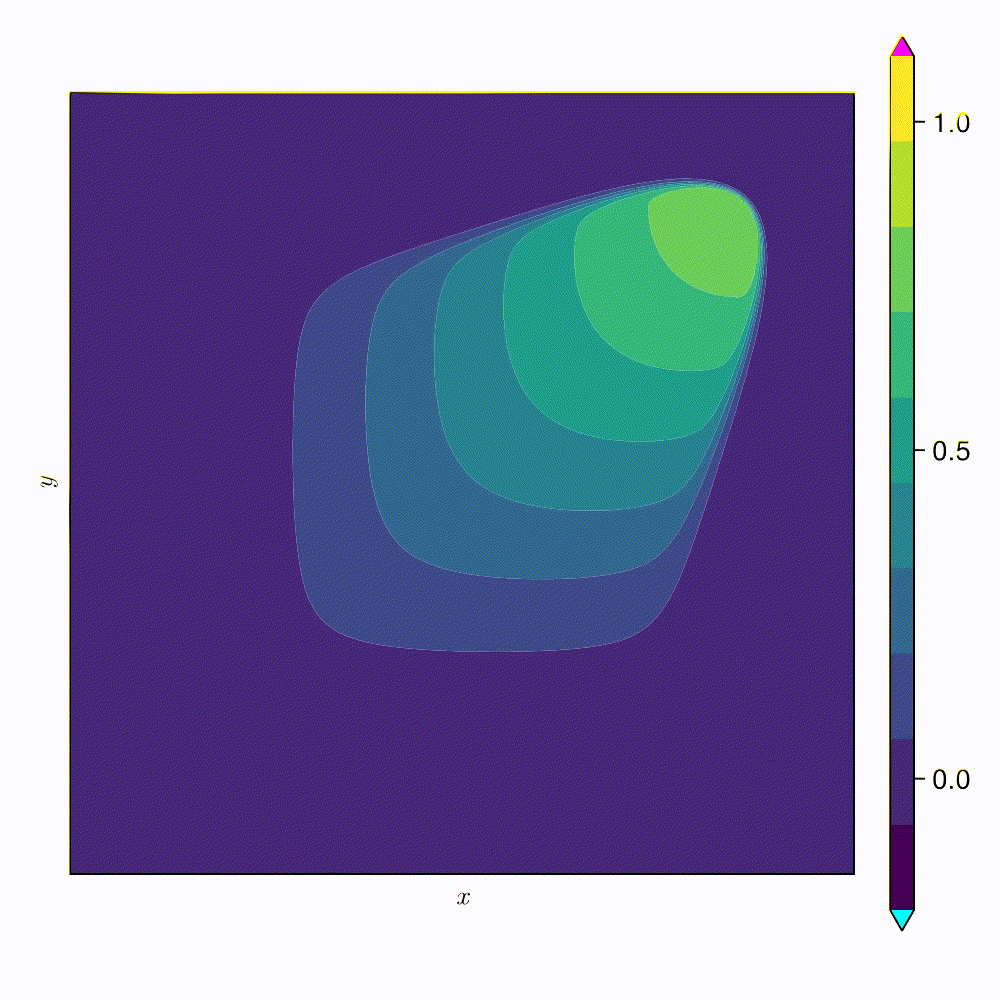
Nonlinear model order reduction
- Spatial discretization that captures the signal with \(2\) DoFs
- \(0.068~\text{s}\) wall-time, \(261~\text{MiB}\) GPU allocation
- \(199\times\) speed-up, \(0.37\%\) relative error

Full order model (FOM)
- Fourier spectral PDE solver
- \(512 \times 512\) grid \( (\approx 262~\text{k}) \) grid points
- \(13.44~\text{s}\) wall-time, \(640~\text{GiB}\) GPU allocation
Model order reduction learns data-driven spatial discretizations
2


Convolutional autoencoder ROMs (CAE-ROMs)
4
- Unsupervised learning technique for data compression
- No control over latent trajectory of ROM DoFs
- ROM dynamics evaluation deviates from learned prediction
SNF architecture: directly model the intrinsic ROM manifold
5

\(\text{Coordinates}\)
\(\text{Loss } (L)\)
\(\text{PDE Problem}\)
\((\boldsymbol{x}, t, \boldsymbol{\mu})\)
\(\text{ Parameters}\)
\( \text{and time}\)
\(\text{Smooth neural field MLP }(g_\theta)\)

\(\text{Backpropagation}\)
\(\text{ Intrinsic ROM manifold}\)
\(\tilde{u}\)
\(\boldsymbol{x}\)
\(\boldsymbol{u}\left( \boldsymbol{x}, t; \boldsymbol{\mu} \right)\)
\(\mathcal{\tilde{U}}\)
\(\nabla_\theta L\)
\(\nabla_\varrho L\)
\(\nabla_\theta L\)
Modeling \(\tilde{\mathcal{U}}\) as a learnable function \(\Xi_\varrho\) restricts ROM states to follow a smooth trajectory.
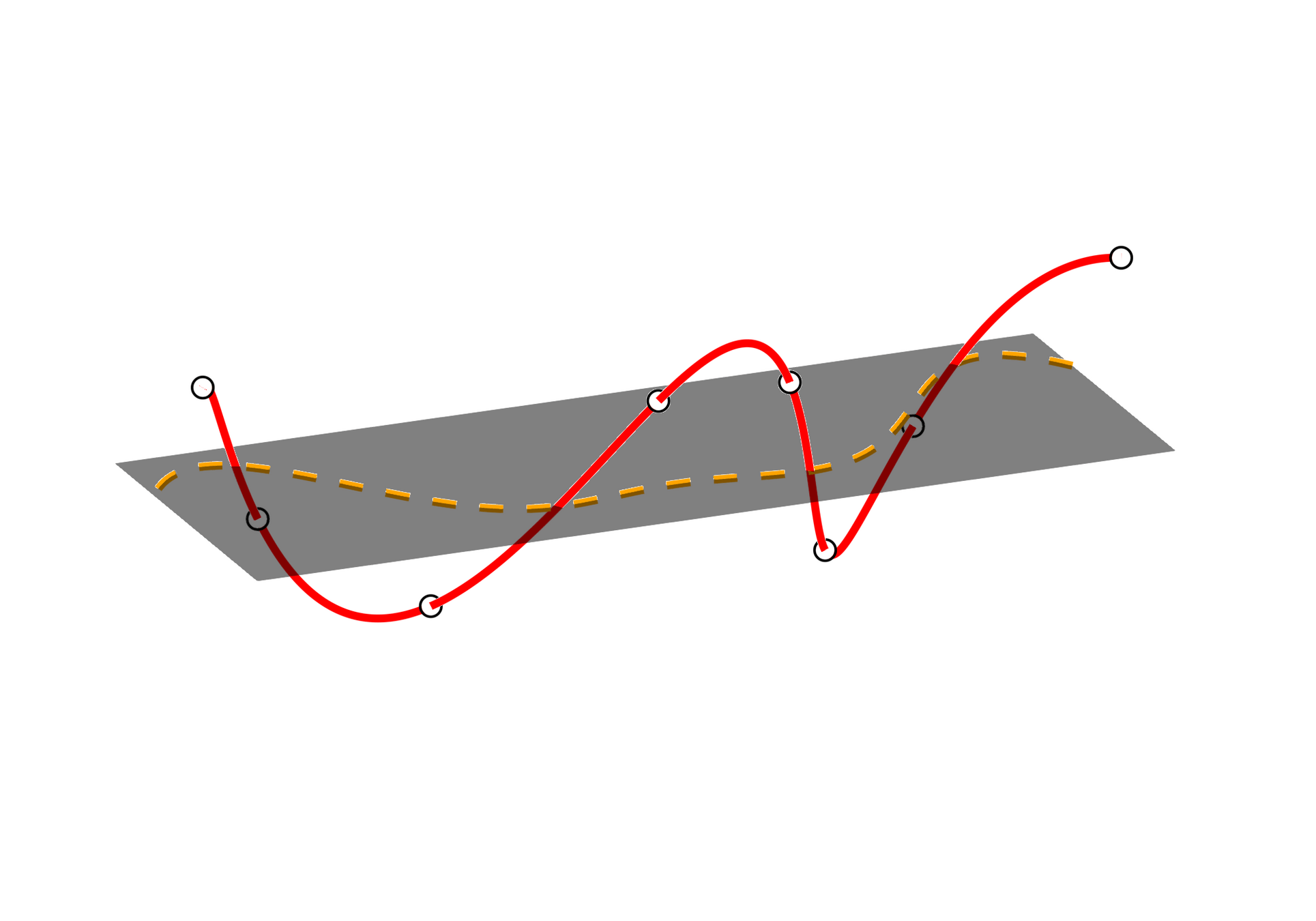
Neural field are ill-equipped to handle high-order derivatives
8
- Grid independent. easy implementation of hyper-reduction
- Problem: inaccurate high-order derivatives
\(\text{Neural field MLP } (g_\theta)\)
\(\boldsymbol{x}\)
\(\boldsymbol{u}\left( \boldsymbol{x} \right)\)
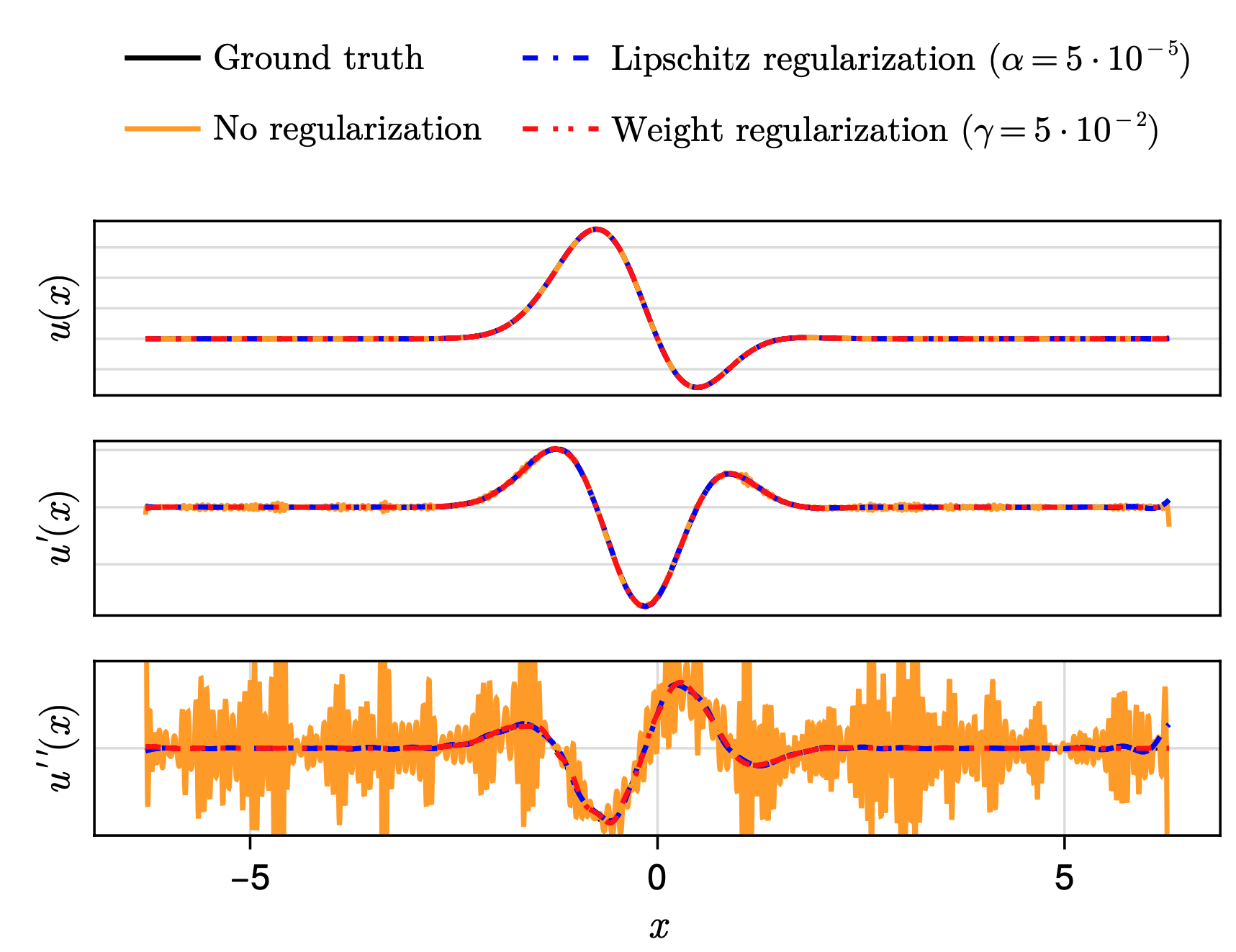
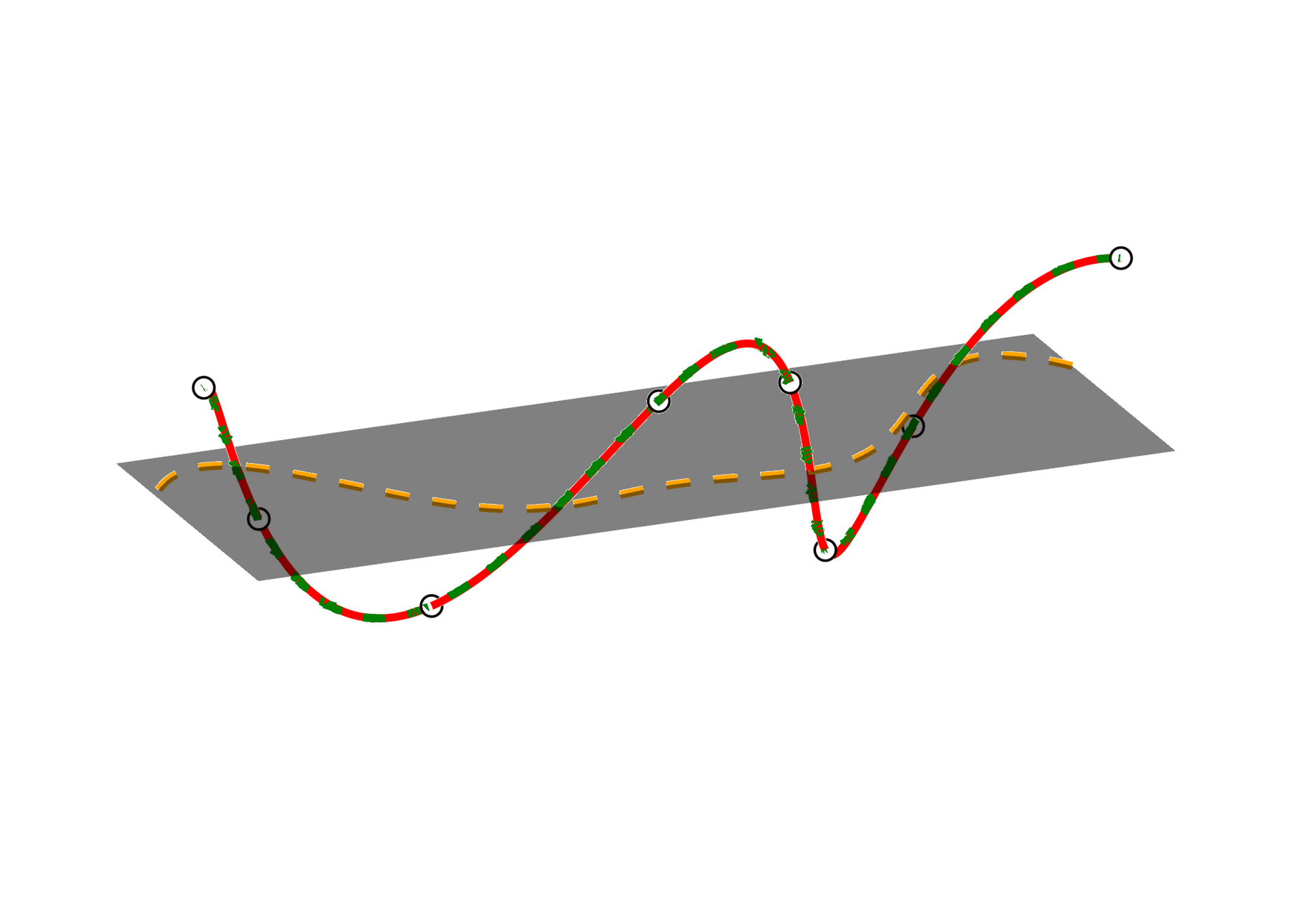
Solution: Apply regularization to ensure that the learned neural field is inherently smooth
- Lipschitz regularization penalizes the Lipschitz constant of the MLP
- Weight regularization penalizes high-frequency components in \( \dfrac{\mathrm{d}}{\mathrm{d}x}\mathrm{NN}(x)\)
Dynamics evaluation with Galerkin projection
3



Experiment: 2D viscous Burgers problem \( (\mathit{Re} = 1\mathrm{k})\)
6


Experiment: 1D scalar advection problem
7

Smooth trajectory of ROM states allows for taking larger time-steps without sacrificing accuracy


\(\text{Predictions}\)
\(\text{Relative error } (\Delta t = \Delta t_0)\)
\(\text{Relative error } (\Delta t = 10\Delta t_0)\)
\(\text{CAE-ROM}\)
\(\text{SNFL-ROM}\)
\(\text{SNFW-ROM}\)
Experiment: 1D Kuramoto-Sivashinsky problem
9

\(\text{Predictions}\)
\(\text{Relative error } (\Delta t = \Delta t_0)\)
\(\text{Relative error } (\Delta t = 10\Delta t_0)\)

Major takeaways
10
AB
Thanks for your attention.
Questions?

Scan QR code to access project website
Experiment: 1D viscous Burgers problem \((\mathit{Re} = 10\text{k})\)
10


\(\text{Predictions}\)
\(\mu = 0.600 \text{ (training)}\)
\(\mu = 0.575 \text{ (inteprolation)}\)
\(\mu = 625 \text{ (extrapolation)}\)
\(\text{CAE-ROM}\)
\(\text{SNFL-ROM}\)
\(\text{SNFW-ROM}\)
Title
1
Model order reduction
1
Plan for presentation
- Motivation
- Accelerate PDE solvers. show 2D Burg as example
- Model order reduction
- make animation akin to poster. Compare e_proj vs N
- CAEs: analyze increasing error in time-evolution
- Fix: directly model the intrinsic ROM manifold (Sec. 4.1)
- Show examples
- INRs: non-differentiability. large errors in time-evolution
- Fix: neural field regularization (Sec. 4.2)
- Results: compare accuracy and speed-up
- Conclusions
1
Notes
- Motivating acceleration example
- MOR: make anim for MOR akin to poster. di