Amazon CoRo February Update
Feb 27, 2025
Adam Wei
Agenda
- Recap
- Sim-Sim Setup
- Sim-Sim Experiments
- Paper plan (IROS)
Question
Would you prefer the monthly check-ins to be presentation-oriented or discussion-oriented?
Robot Data Diet

Big data
Big transfer gap
Small data
No transfer gap
Ego-Exo
robot teleop


Open-X
simulation
How can we obtain data for imitation learning?
Cotrain from different data sources
(ex. sim & real)
Problem Formulation
Cotraining: Use both datasets to train a model that maximizes some test objective
Model: Diffusion Policy
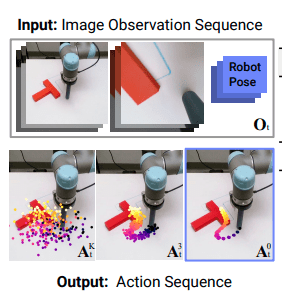
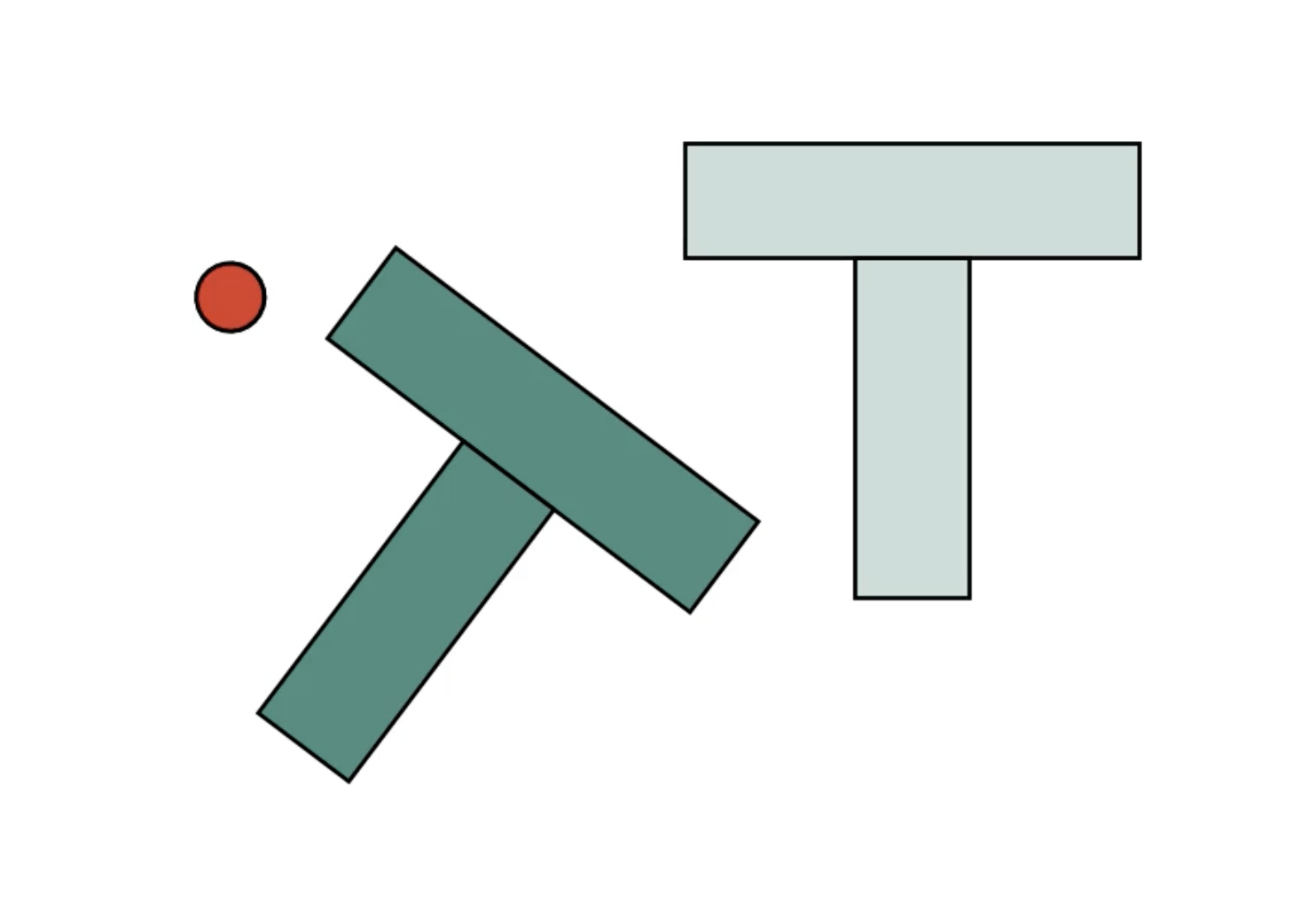
Test objective: Success rate on a planar pushing task
Vanilla Cotraining
(Tower property of expectations)
Vanilla Cotraining:
- Choose \(\alpha \in [0,1]\)
- Train a diffusion policy that minimizes \(\mathcal L_{\mathcal D^\alpha}\)
\(\mathcal D^\alpha\) Dataset mixture
- Sample from \(\mathcal D_R\) w.p. \(\alpha\)
- Sample from \(\mathcal D_S\) w.p, \(1-\alpha\)
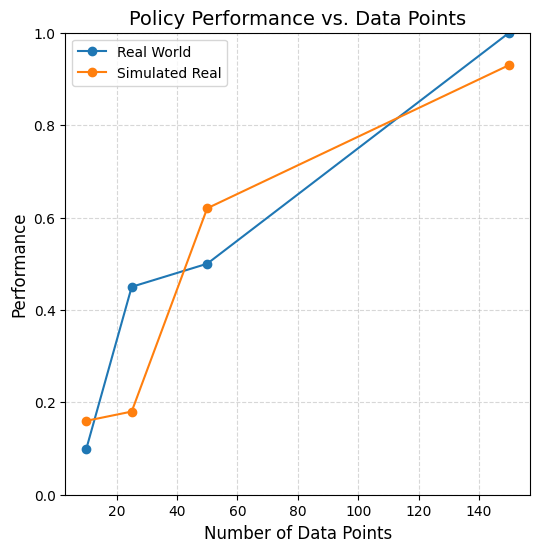
Results
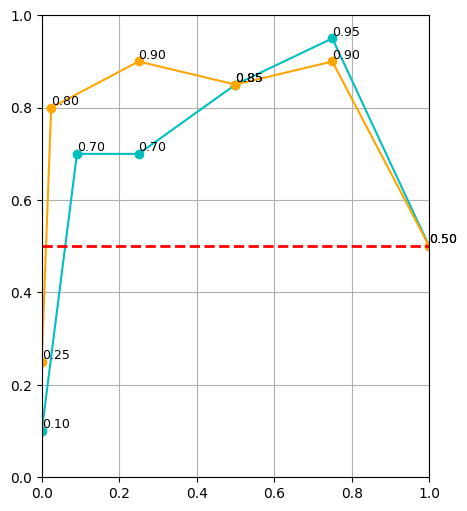
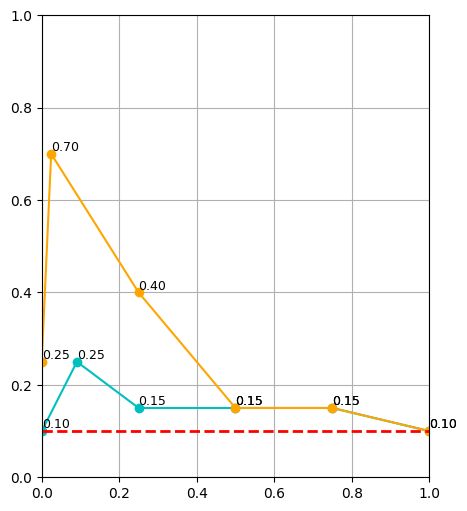

\(|\mathcal D_R| = 10\)
\(|\mathcal D_R| = 50\)
\(|\mathcal D_R| = 150\)
cyan: \(|\mathcal D_S| = 500\) orange: \(|\mathcal D_S| = 2000\) red: real only
Highlights
10 real demos
2000 sim demos
50 real demos
500 sim demos
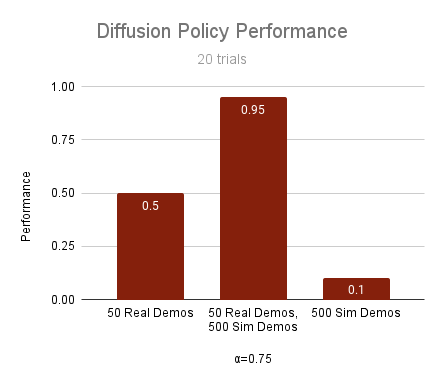
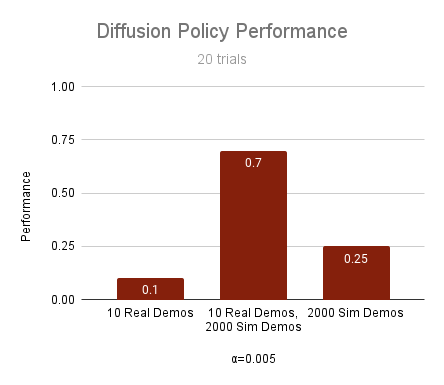
- Cotraining can drastically improve performance
Key Takeaways
- Policy's are sensitive to \(\alpha\), especially when \(|\mathcal D_R|\) is small
- Smaller \(|\mathcal D_R|\) → smaller \(\alpha\), larger \(|\mathcal D_R|\) → larger \(\alpha\)
- Scaling \(|\mathcal D_S|\) improves performance.
- Scaling \(|\mathcal D_S|\) reduces sensitivity of \(\alpha\)
Initial experiments suggest that scaling up sim is a good idea!
... to be verified at larger scales with sim-sim experiments
Sim2Sim Setup
Can we create 2 different simulation environments that replicate the sim2real gap?
- i.e. sim2sim gap \(\approx\) sim2real gap
If yes, need to emulate...
- Sim2real visual gap
- Sim2real physics gap
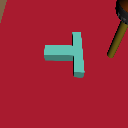
Sim2Sim Visual Gap
Sim2Real
Sim2Sim
Simulation
"Real World"

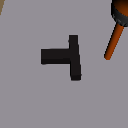
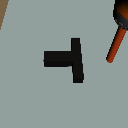
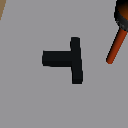
Sim2Sim Visual Gap
Sim2Real
Sim2Sim
Simulation
"Real World"
Quasi-static dynamics
Quasi-static dynamics
Hydroelastic + Drake Physics
Real World Physics
Sim2Real vs Sim2Sim
Real Data Policies
Sim Data Only
Pros & Cons of Sim2Sim
Cons
- Only a proxy for sim-and-real results
- Hard to perfectly emulate the sim2real gap
Pros
- Automated, high confidence policy evaluation + logs
- Large-scale experiments
- Precise control of the magnitude of the sim2real gaps
- Important for distribution shift experiments
- Informative for sim-and-real
Sim2Sim Experiments
- Distribution Shifts
- Isolating the effect of physics vs visual shifts
- The role of sim2real in cotraining
- Asymptotes of cotraining (mini-scaling laws)
Distribution Shifts




Setting up a simulator for data generation is non-trivial
- camera calibration, colors, assets, physics, tuning, data filtering, task-specifications, etc
+ Actions
What qualities matter in the simulated data?
Distribution Shifts
Domain Rand.
Color Shift
Physics Shift
(CoM y-offset)
Level 1
Level 2
Level 3
+3cm
-3cm
-6cm


Level 4
Level 0
Drake physics
Visual Shifts
Distribution Shifts
Goal Shift
Object Shift
Task Shift
Level 1
Level 2
Level 3
Only 1 level
Level 0
Distribution Shifts
Experimental Setup
- Tested ~3 levels of shift for each shift**
- \(|\mathcal D_R|\) = 50, \(|\mathcal D_S|\) = 2000,
- \(\alpha = 0,\ \frac{|\mathcal{D}_{R}|}{|\mathcal{D}_{R}|+|\mathcal{D}_{S}|},\ 0.25,\ 0.5,\ 0.75,\ 0.9,\ 0.95,\ 1\)
** Except object shift
Results

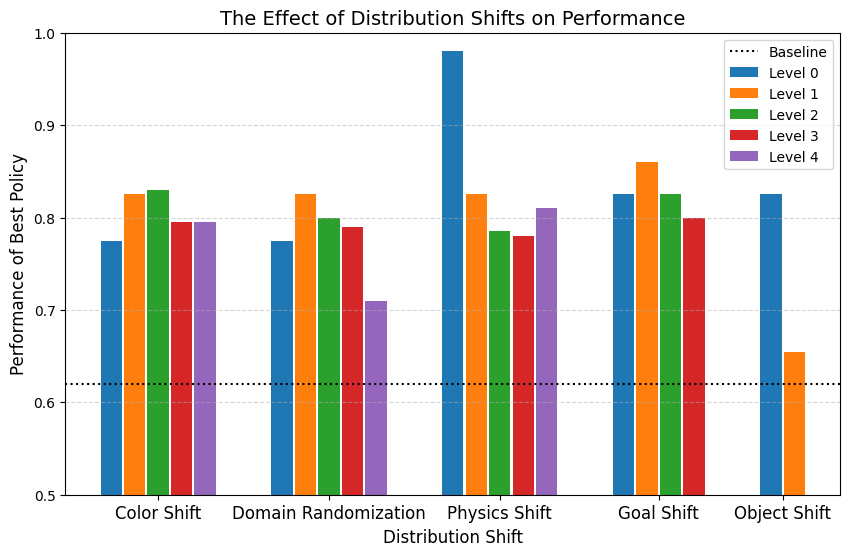
Results
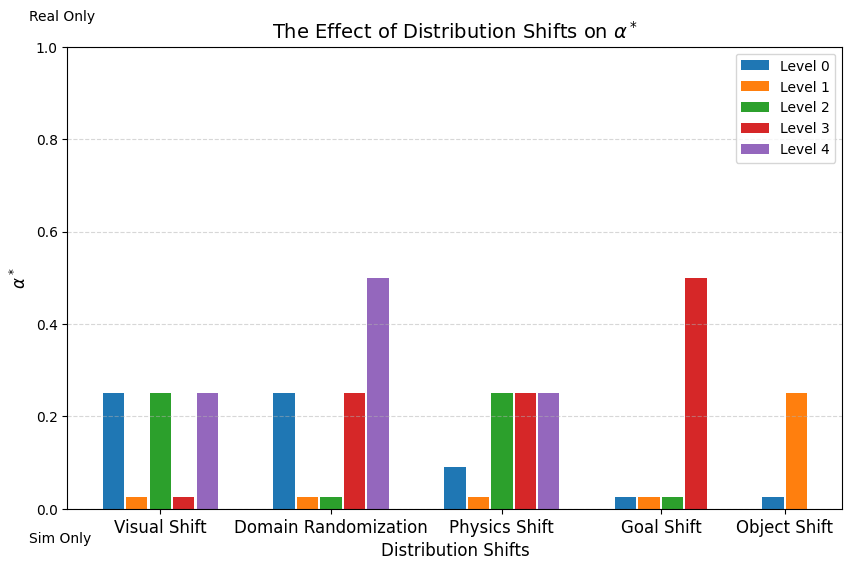
Conclusions
- Smaller physics shift \(\implies\) better performance
- Some visual shift is desired, but performance degrades with large visual shifts
- Required to distinguish sim and real
- Visual encoders learn robust representations
3. Task shift (??) TBD
Sim2Sim Experiments
- Distribution Shifts
- Isolating the effect of physics vs visual shifts
- The role of sim2real in cotraining
- Asymptotes of cotraining (mini-scaling laws)
Removing Physics/Visual Gap
In sim2sim, we can analyze different types of sim2real gaps independently.
Physics Gap
Visual Gap
Off
On
Off
On
Perfect Simulator
Perfect Physics Engine
Perfect Renderer
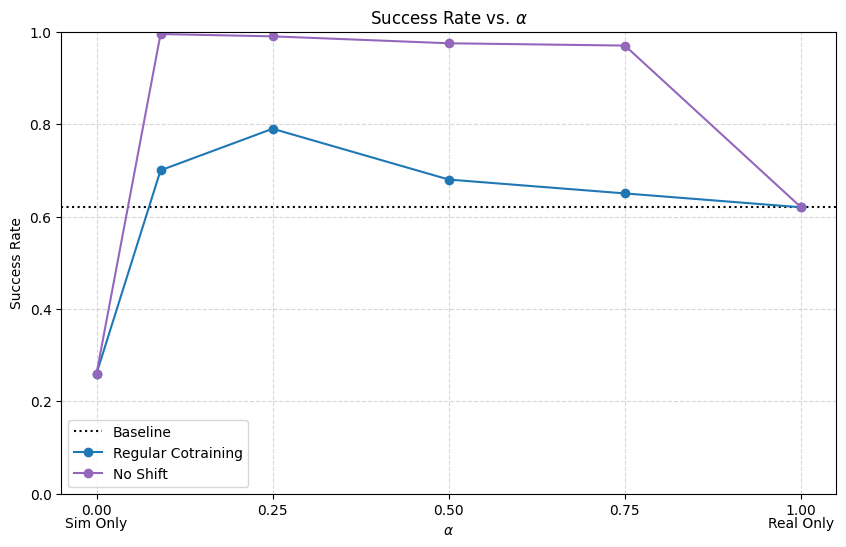
Regular Cotraining
Results: \(|\mathcal D_R|=50\), \(|\mathcal D_S|=500\)
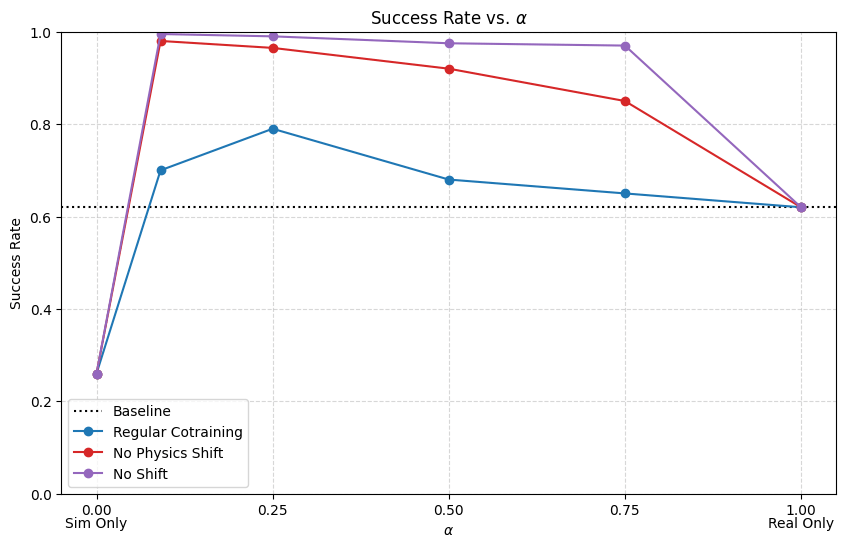
Results: \(|\mathcal D_R|=50\), \(|\mathcal D_S|=500\)
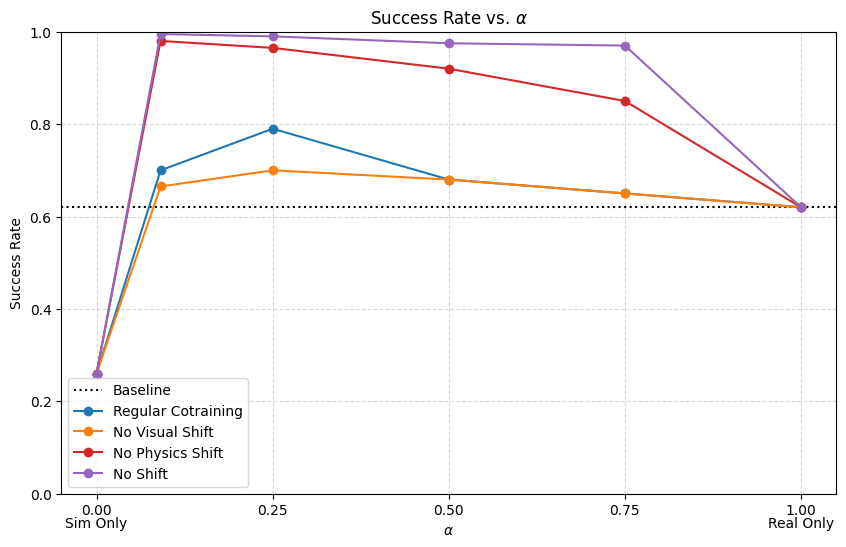
Results: \(|\mathcal D_R|=50\), \(|\mathcal D_S|=500\)
Results: \(|\mathcal D_R|=50\), \(|\mathcal D_S|=500\)
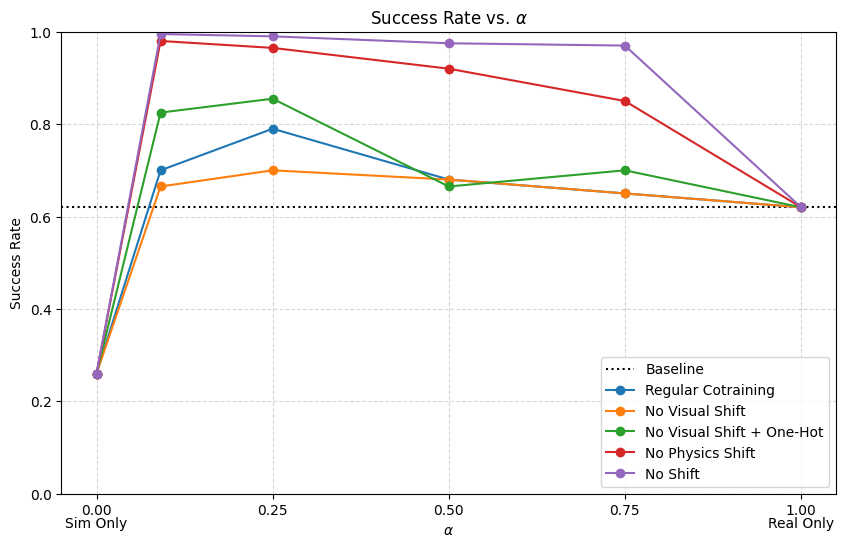
Results: \(|\mathcal D_R|=50\), \(|\mathcal D_S|=500\)
Conclusions
- Visual encoders are robust to visual gaps
- Reducing physics gap is very important for dynamic or contact-rich tasks
- If there is physics gap, the model needs to have enough information in its inputs to distinguish sim and real
- Visual gap or one-hot encoding
- Some visual gap is not detrimental; in fact helpful
Sim2Sim Experiments
- Distribution Shifts
- Isolating the effect of physics vs visual shifts
- The role of sim2real in cotraining
- Asymptotes of cotraining (mini-scaling laws)
Sim2Sim Experiments
- Distribution Shifts
- Isolating the effect of physics vs visual shifts
- The role of sim2real in cotraining
- Asymptotes of cotraining (mini-scaling laws)
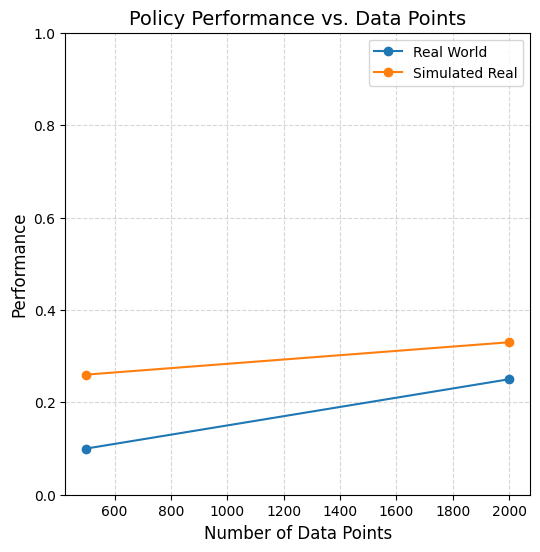
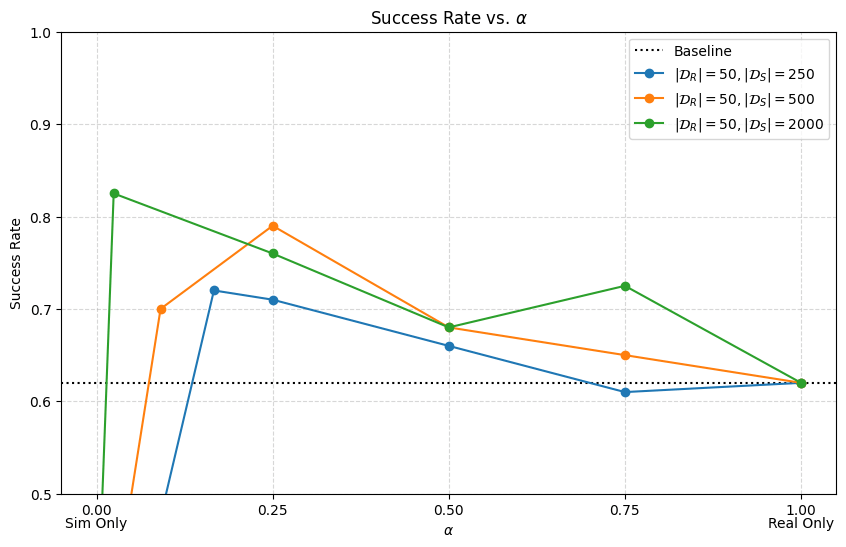
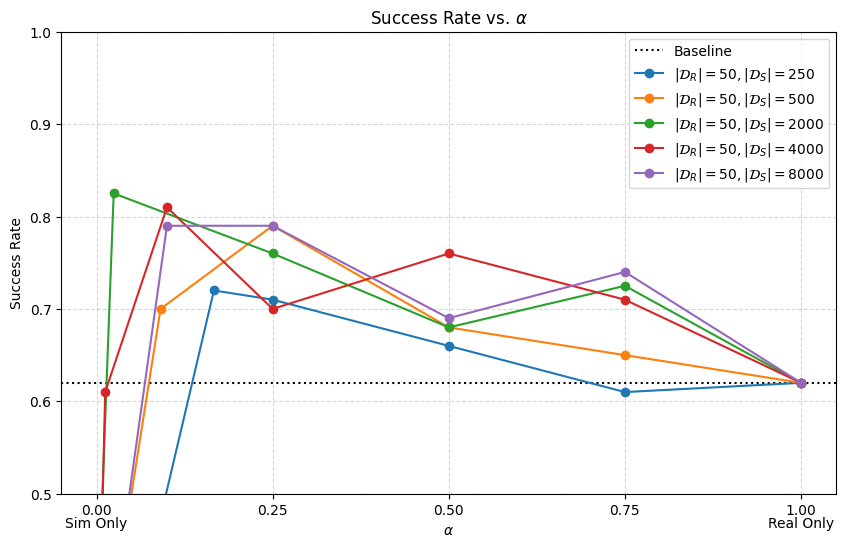
Cotraining (Mini) Scaling Laws
- Policy's are sensitive to \(\alpha\), especially when \(|\mathcal D_R|\) is small
- Smaller \(|\mathcal D_R|\) → smaller \(\alpha\), larger \(|\mathcal D_R|\) → larger \(\alpha\)
- Scaling \(|\mathcal D_S|\) improves performance.
- Scaling \(|\mathcal D_S|\) reduces sensitivity of \(\alpha\)
Initial experiments suggest that scaling up sim is a good idea!
... to be verified at larger scales with sim-sim experiments
Cotraining (Mini) Scaling Laws
Disclaimer: Preliminary Results
- Sim2sim gap was too small (relative to sim2real gap)
- Re-doing these experiments with larger sim2sim gap
Results
Results
Plan For IROS
Section 1: Real World Experiments
- Cotraining results, trends, finetuning comparison
Section 2: Simulation Experiments
- Distribution shifts, isolating sim2real gaps, scaling up Section 1 experiments
Section 3: Empirical Analysis
- Sim-and-real discernability + positive transfer, the role of sim2real, cotraining as regularization
Misc. Slides
Cotrained Policies
Cotrained policies exhibit similar characteristics to the real-world expert regardless of the mixing ratio
Real Data
- Aligns orientation, then translation sequentially
- Sliding contacts
- Leverage "nook" of T
Sim Data
- Aligns orientation and translation simultaneously
- Sticking contacts
- Pushes on the sides of T
How does cotraining improve performance?
Hypothesis
- Cotrained policies can identify the sim vs real: sim data helps by learning better representations and filling in gaps in real data
- Sim data prevents overfitting and acts as a regularizor
- Sim data provides more information about high probability unconditional actions \(p_A(a)\)
Probably some combination of the above.
Hypothesis 1: Binary classification
Cotrained policies can identify the sim vs real: sim data improves representation learning and fills in gaps in real data
| Policy | Observation embeddings acc. | Final activation acc. |
|---|---|---|
| 50/500, alpha = 0.75 | 100% | 74.2% |
| 50/2000, alpha = 0.75 | 100% | 89% |
| 10/2000, alpha = 0.75 | 100% | 93% |
| 10/2000, alpha = 5e-3 | 100% | 94% |
| 10/500, alpha = 0.02 | 100% | 88% |
Only a small amount of real data is needed to separate the embeddings and activations
Hypothesis 1: tSNE
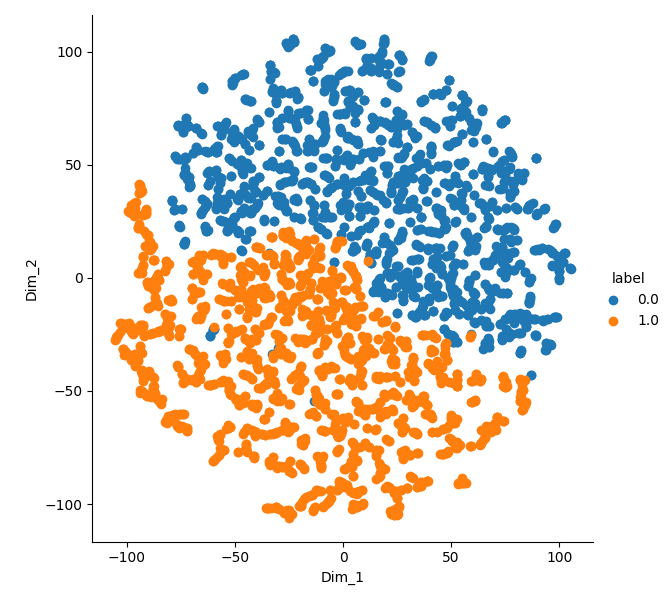
- t-SNE visualization of the observation embeddings
Hypothesis 1: kNN on actions
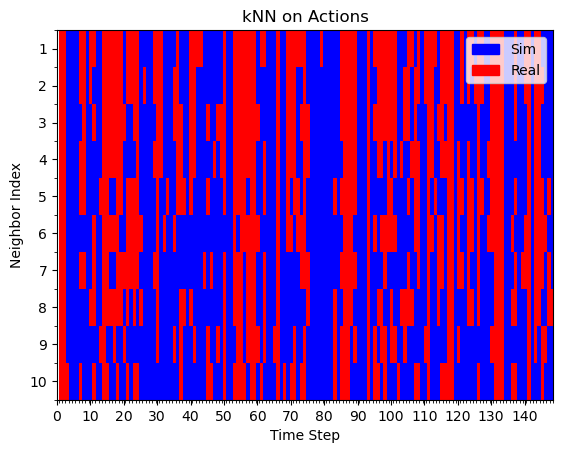

Real Rollout
Sim Rollout
Mostly red with blue interleaved
Mostly blue
Assumption: if kNN are real/sim, this behavior was learned from real/sim
Similar results for kNN on embeddings
Hypothesis 2
Sim data prevents overfitting and acts as a regularizor
When \(|\mathcal D_R|\) is small, \(\mathcal L_{\mathcal D_R}\not\approx\mathcal L\).
\(\mathcal D_S\) helps regularize and prevent overfitting
Hypothesis 3
Sim data provides more information about \(p_A(a)\)
- i.e. improves the cotrained policies prior on "likely actions"
Can we test/leverage this hypothesis with classifier-free guidance?
... more on this later if time allows
Hypothesis
Research Questions
- How can we test these hypothesis?
- Can the underlying principles of cotraining help inform novel cotraining algorithms?
Hypothesis
Hypothesis
- Cotrained policies can identify the sim vs real: sim data helps by learning better representations and filling in gaps in real data
- Sim data prevents overfitting and acts as a regularizor
- Sim data provides more information about high probability actions \(p_A(a)\)
Example ideas:
- Hypothesis 1 \(\implies\) adversarial formulations for cotraining, digitial twins, representation learning, etc
- Hypothesis 3 \(\implies\) classifier-free guidance, etc
Research Questions
- For vanilla cotraining: how do \(|\mathcal D_R|\), \(|\mathcal D_S|\), and \(\alpha\) affect the policy's success rate?
- How do distribution shifts affect cotraining?
- Propose new algorithms for cotraining
- Adversarial formulation
- Classifier-free guidance
Sim2Real Gap
Thought experiment: what if sim and real were nearly indistinguishable?
- Less sensitive to \(\alpha\)
- Each sim data point better approximates the true denoising objective
- Improved cotraining bounds
Sim2Real Gap
Fact: cotrained models can distinguish sim & real
Thought experiment: what if sim and real were nearly indistinguishable?

Sim2Real Gap
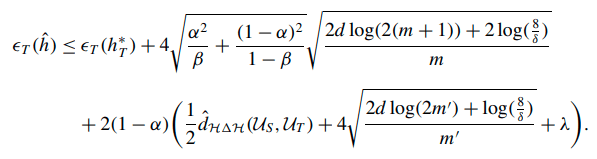
\(\mathrm{dist}(\mathcal D_R,\mathcal D_S)\) small \(\implies p^{real}_{(O,A)} \approx p^{sim}_{(O,A)} \implies p^{real}_O \approx p^{sim}_O\)
'visual sim2real gap'
Sim2Real Gap
Current approaches to sim2real: make sim and real visually indistinguishable
- Gaussian splatting, blender renderings, real2sim, etc
\(p^{R}_O \approx p^{S}_O\)
Do we really need this?
\(p^{R}_O \approx p^{S}_O\)
Sim2Real Gap
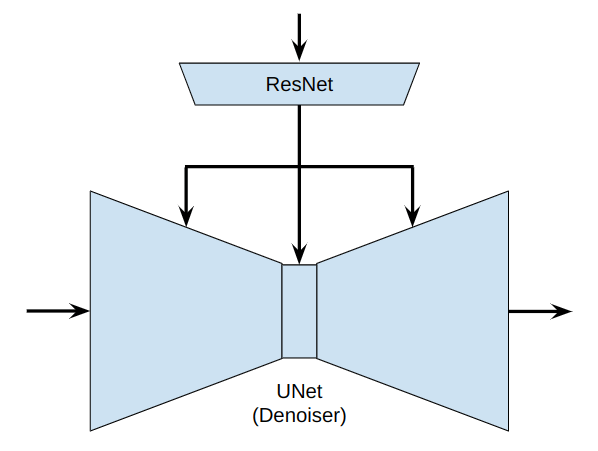
\(a^k\)
\(\hat \epsilon^k\)
\(o \sim p_O\)
\(o^{emb} = f_\psi(o)\)
\(p^{R}_O \approx p^{S}_O\)
\(p^{R}_{emb} \approx p^{S}_{emb}\)
\(\implies\)
Weaker requirement
Adversarial Objective
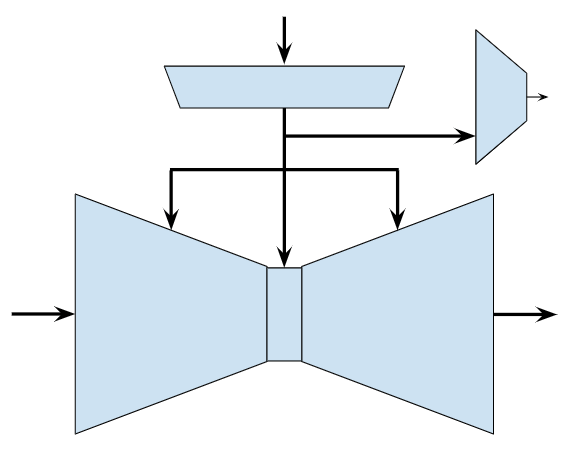
\(\epsilon_\theta\)
\(f_\psi\)
\(d_\phi\)
\(\hat{\mathbb P}(f_\psi(o)\ \mathrm{is\ sim})\)
\(\epsilon^k\)
\(a^k\)
o
Adversarial Objective
Denoiser Loss
Negative BCE Loss
\(\iff\)
(Variational characterization of f-divergences)
Adversarial Objective
Common features (sim & real)
- End effector position
- Object keypoints
- Contact events
Distinguishable features*
- Shadows, colors, textures, etc
Relavent for control...
- Adversarial objective discourages the embeddings from encoding distinguishable features*
* also known as protected variables in AI fairness literature
Adversarial Objective
\(\epsilon_\theta\)
\(f_\psi\)
\(d_\phi\)
\(\hat{\mathbb P}(f_\psi(o)\ \mathrm{is\ sim})\)
\(\epsilon^k\)
\(a^k\)
o
Adversarial Objective
Denoiser Loss
Negative BCE Loss
\(\iff\)
(Variational characterization of f-divergences)
Adversarial Objective
Hypothesis:
- Less sensitive to \(\alpha\)
- Less sensitive to visual distribution shifts
- Improved performance for \(|\mathcal D_R|\) = 10
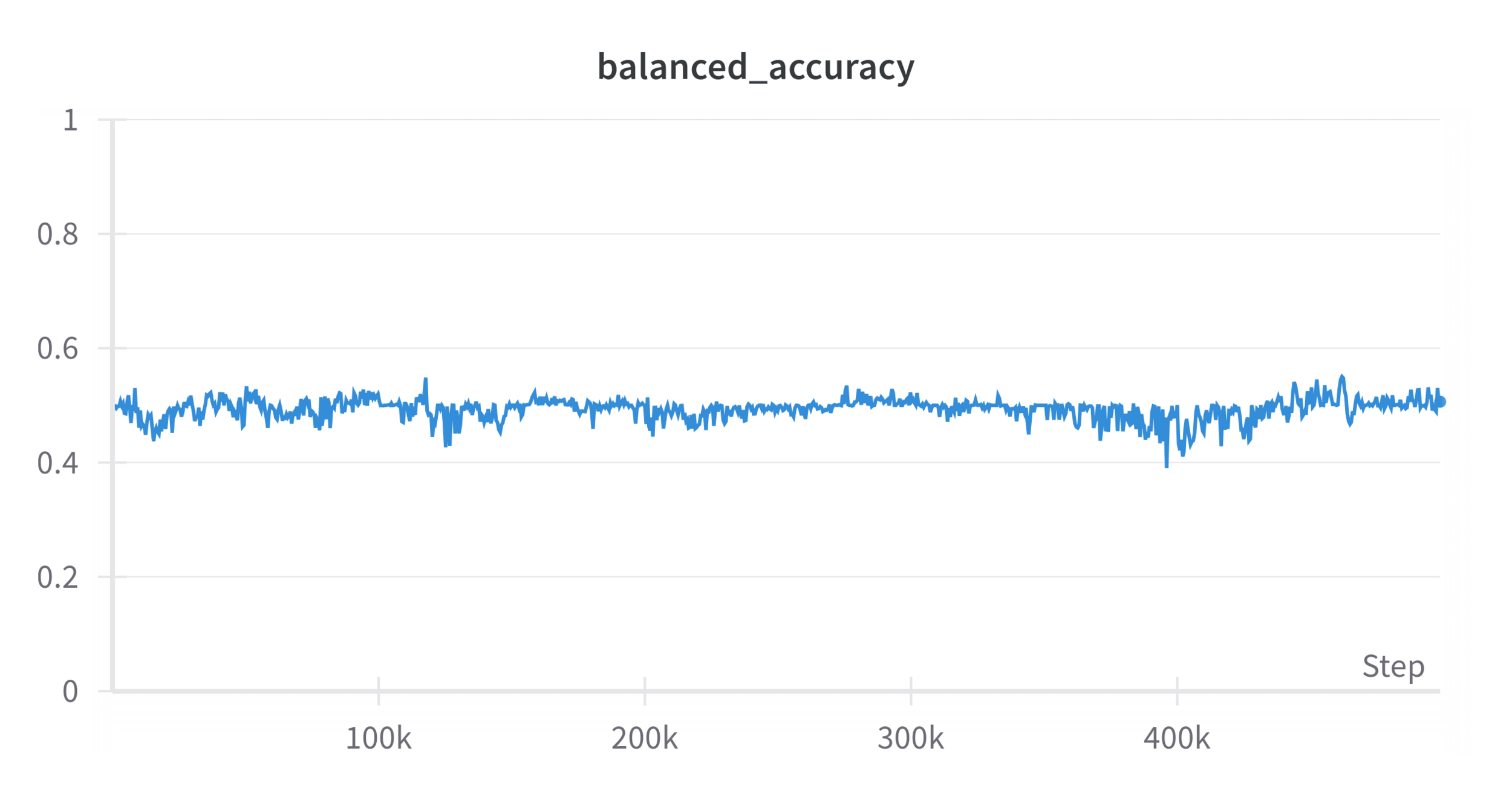
Initial Results
\(|\mathcal D_R| = 50\), \(|\mathcal D_S| = 500\), \(\lambda = 1\), \(\alpha = 0.5\)
Performance: 9/10 trials
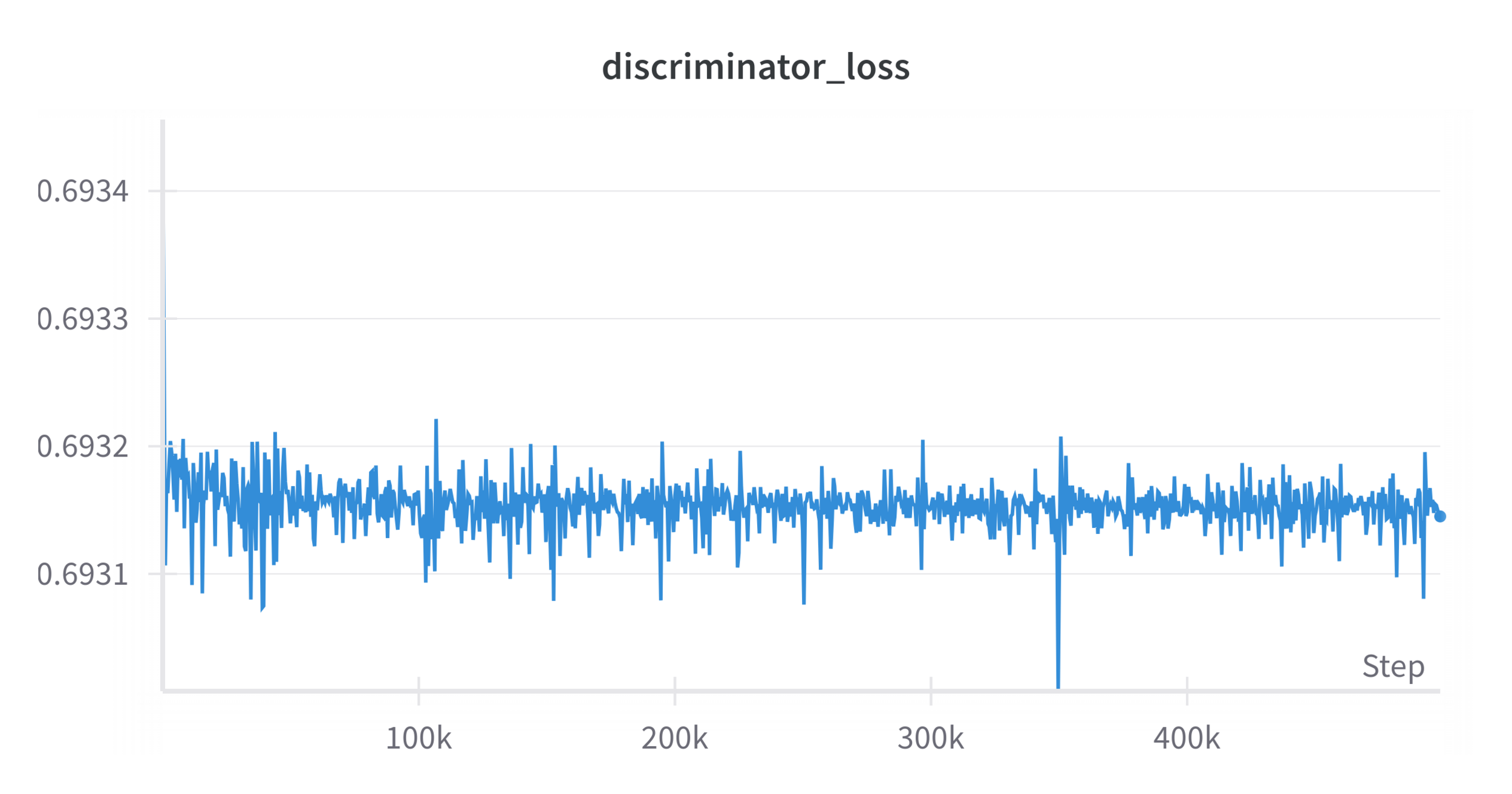
~log(2)
~50%
Problems...
-
A well-trained discriminator can still distinguish sim & real
- This is an issue with the GAN training process (during training, the discriminator cannot be fully trained)
- Image GAN models suffer similar problems
Potential solution?
- Place the discriminator at the final activation?
- Wasserstein GANs (WGANs)
Two Philosophies For Cotraining
1. Minimize sim2real gap
- Pros: better bounds, more performance from each data point
- Cons: Hard to match sim and real, adversarial formulation assumes protected variables are not relevant for control
2. Embrace the sim2real gap
- Pros: policy can identify and adapt strongly to its target domain at runtime, do not need to match sim and real
- Cons: Doesn't enable "superhuman" performance, potentially less data efficient
Hypothesis 3
Sim data provides more information about \(p_A(a)\)
- Sim data provides a strong prior on "likely actions" =>improves the performance of cotrained policies
We can explicitly leverage this prior using classifier free guidance
Conditional Score Estimate
Unconditional Score Estimate
Helps guide the diffusion process
Classifier-Free Guidance
Conditional Score Estimate
- Term 2 guides conditional sampling by separating the conditional and unconditional action distributions
- In image domain, this results in higher quality conditional generation

Difference in conditional and unconditional scores
Classifier-Free Guidance
- Due to the difference term, classifier-free guidance embraces the differences between \(p^R_{(A|O)}\) and \(p_A\)
- Note that \(p_A\) can be provided scalably by sim and also does not require rendering observations!
Future Work
- Evaluating scaling laws (sim-sim experiments)
- Adversarial and classifier-free guidance formulations
Immediate next steps:
Guiding Questions:
- What are the underlying principles and mechanisms of cotraining? How can we test them?
- Can we leverage these principles for algorithm design?
- Should cotraining minimize or embrace the sim2real gap?
- How can we cotrain from non-robot data (ex. video, text, etc)?