Amazon CoRo June Update
Jun 19, 2025
Adam Wei
Agenda
- IROS Paper Updates
- Cotraining plateau experiments
- MMD experiments
- Ambient Diffusion direction
IROS Updates: Accepted!
- Submission was accepted to IROS
- New website & code
- New expermients
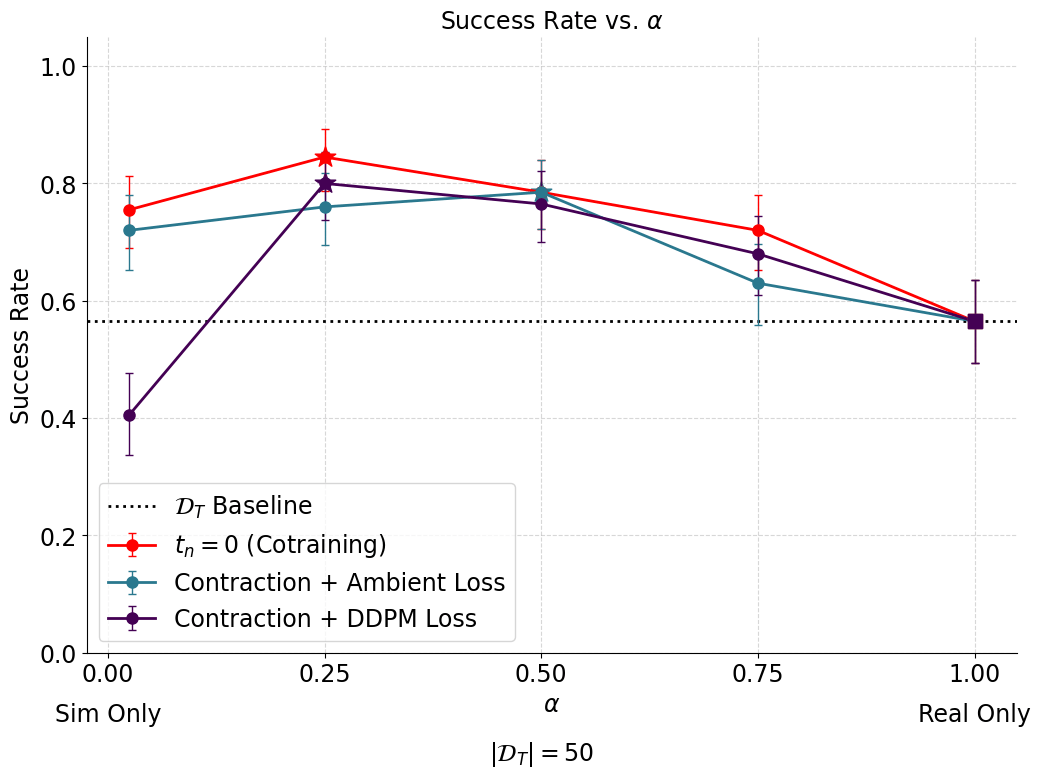
Cotraining Plateau Experiments
Recall: Scaling up sim data improves performance up until a plateau...
Question: How much more real data would you need to collect to match the cotraining plateau?
Cotraining Plateau Experiments
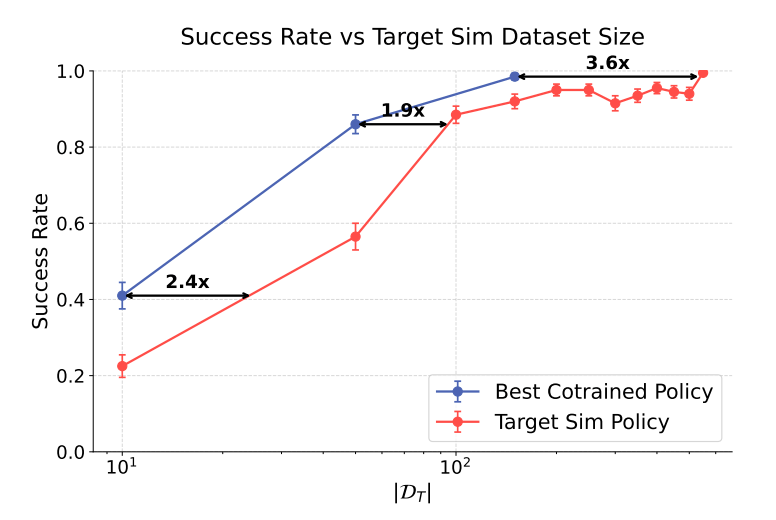
cotraining plateau \(\approx\) 2-3x more deal data
MMD Experiments
- High-performing policies can discern sim from real
- Overall, smaller sim2real gaps \(\implies\) better performance
Recall that:
Questions:
1. Can/should we align the sim and real representations?
2. Can we improve performance by reducing the sim2real gap at the representation level?
MMD Experiments
Denoising objective
Encourage aligned representations
- Term 2 encourages the policy to ignore artifacts from sim2real (lighting, shadows, etc)
- Term 1 encourages the policy to retain differences that are important for action prediction
- Competing objectives are balanced by \(\lambda\)
MMD Experiments
Denoising objective
Encourage aligned representations
MMD Formulation
Goal: Learn a representation for sim and real that cannot be discerned by a classifier \(d_\phi\)
Issues: Adversarial training is unstable and challenging...
MMD Formulation
Given samples \(x_i \sim p^S_\theta\) and \(y_i \sim p^R_\theta\):
Ex: \(k(x, y)=e^{-\frac{\lVert x-y\rVert_2^2}{\sigma^2}}\)
MMD Formulation
- MMD is a common distance metric
- Stable to train and differentiable
Results
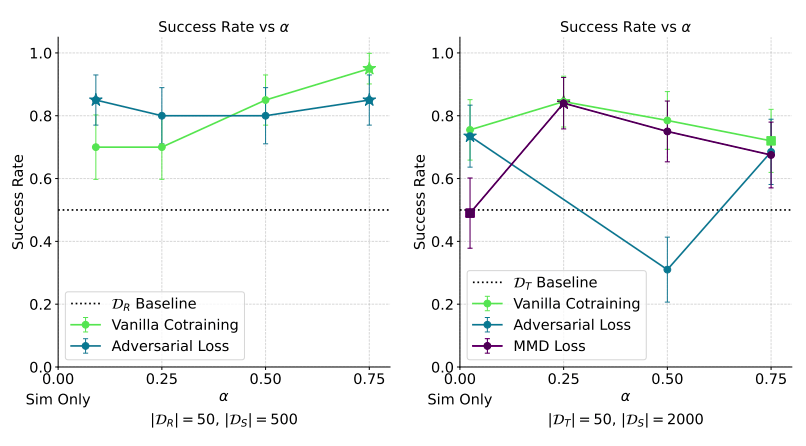
Adding an alignment objective does not improve performance and adds complexity
Ambient Diffusion
Learning from "clean" and "corrupt" data
Won't be going over the details of the algorithm...
... only the high-level ideas
High Frequency Corruption
\(t=0\)
\(t=T\)
\(t=t_n\)
\(\mathbb E[\lVert h_\theta(x_t, t) - x_0 \rVert_2^2]\)
\(\mathbb E[\lVert \frac{\sigma_t^2 - \sigma_{t_n}^2}{\sigma_t^2} h_\theta(x_t,t) + \frac{\sigma_{t_n}^2}{\sigma_t^2}x_t - x_{t_n} \rVert_2^2]\)
Use clean data to learn denoisers for \(t\in(0,T]\)
Use corrupt data to learn denoisers for \(t\in(t_n,T]\)
Initial Results
Current results are worse than mixing the data
- Initial implementation was missing many key details
- Baseline is very well-tuned
- Sim-and-real cotraining may not be the right application?
Implementation Details
- Sampler, noising once per data point, loss function scaling, classifier training process, etc...
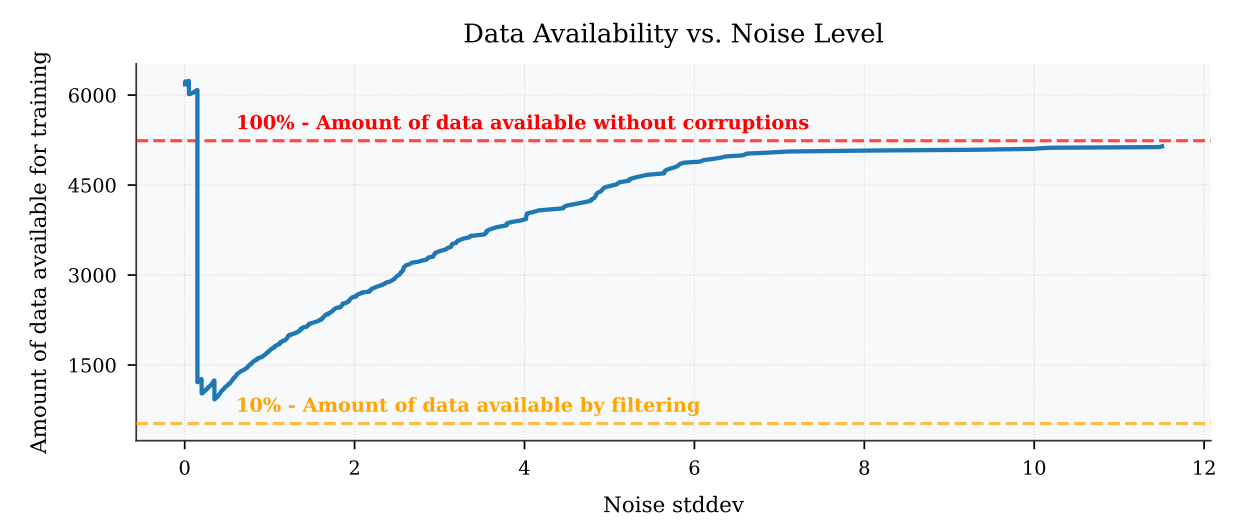
Low Frequency Corruptions
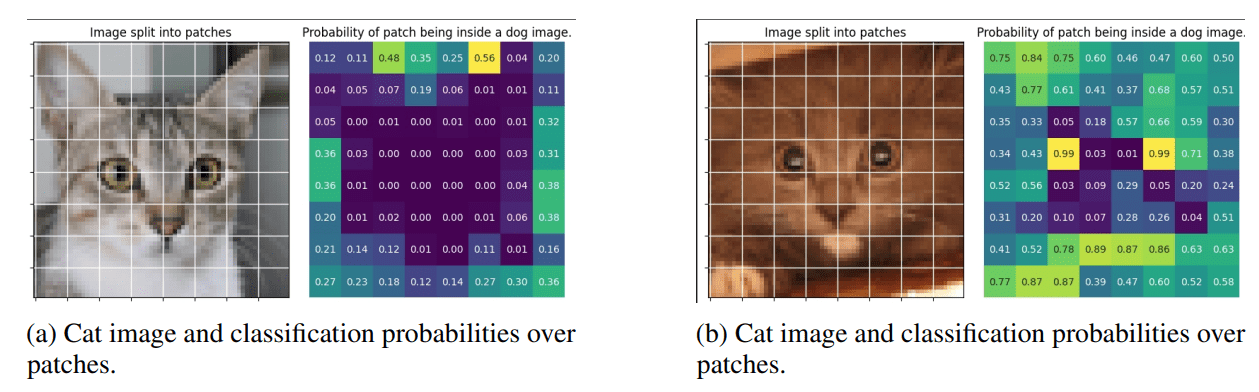
Intuition:
- At low noise levels, only a small "patch" of the image is needed to diffuse optimally
- Can use OOD samples at low noise levels so long as the local patches match the patches for the clean data
Future Directions
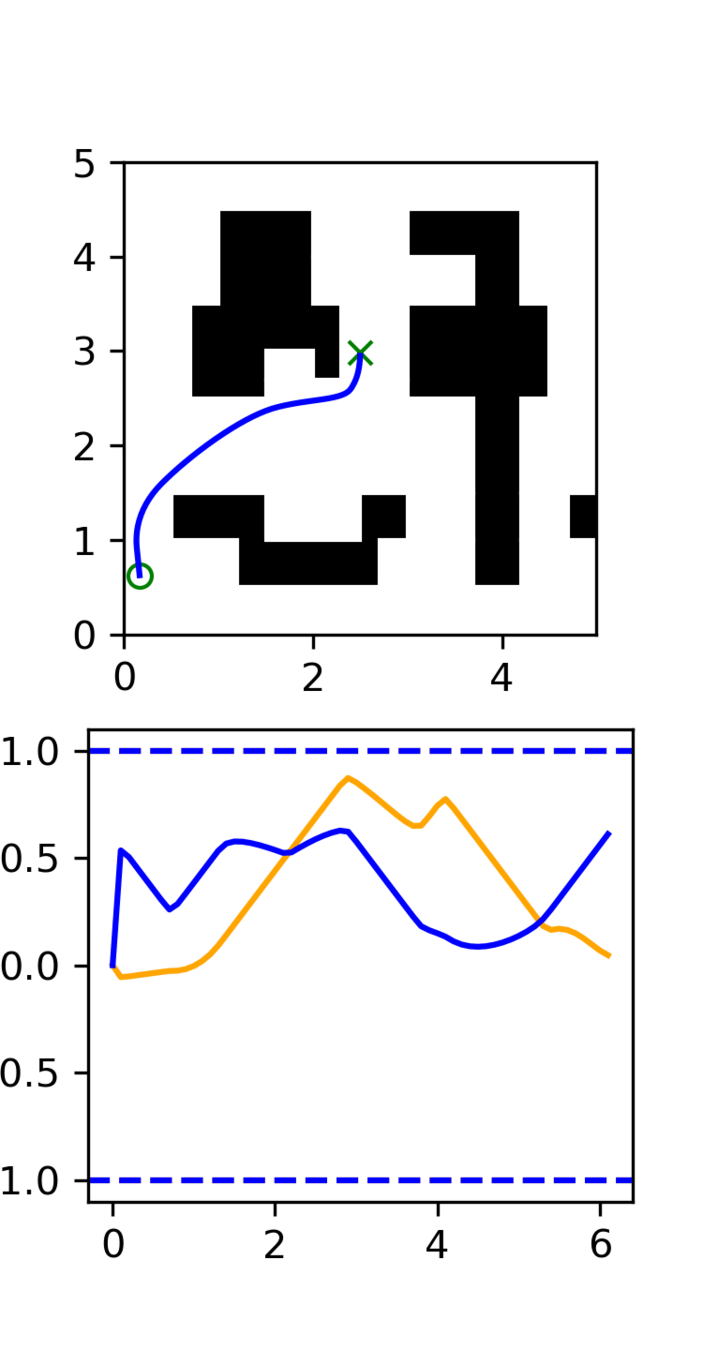
GCS
(clean)
RRT
(clean)
Task: Cotrain on GCS and RRT data
Goal: Sample clean and smooth GCS plans
- Example of high frequency corruption
- Common in robotics
- Can be extended to 7DoF robot arm experiment