Thesis Defense
This is a live streamed presentation. You will automatically follow the presenter and see the slide they're currently on.
This is a live streamed presentation. You will automatically follow the presenter and see the slide they're currently on.
Zachary Sunberg
May 25, 2018
Introduction
UAV Collision Avoidance
Lane Changing with Internal States
Solving Continuous POMDPs
POMDPs.jl
Introduction
UAV Collision Avoidance
Lane Changing with Internal States
Solving Continuous POMDPs
POMDPs.jl
Controlling an Autonomous Vehicle is inherently a multi-objective problem
Minimize resource use
(especially time)
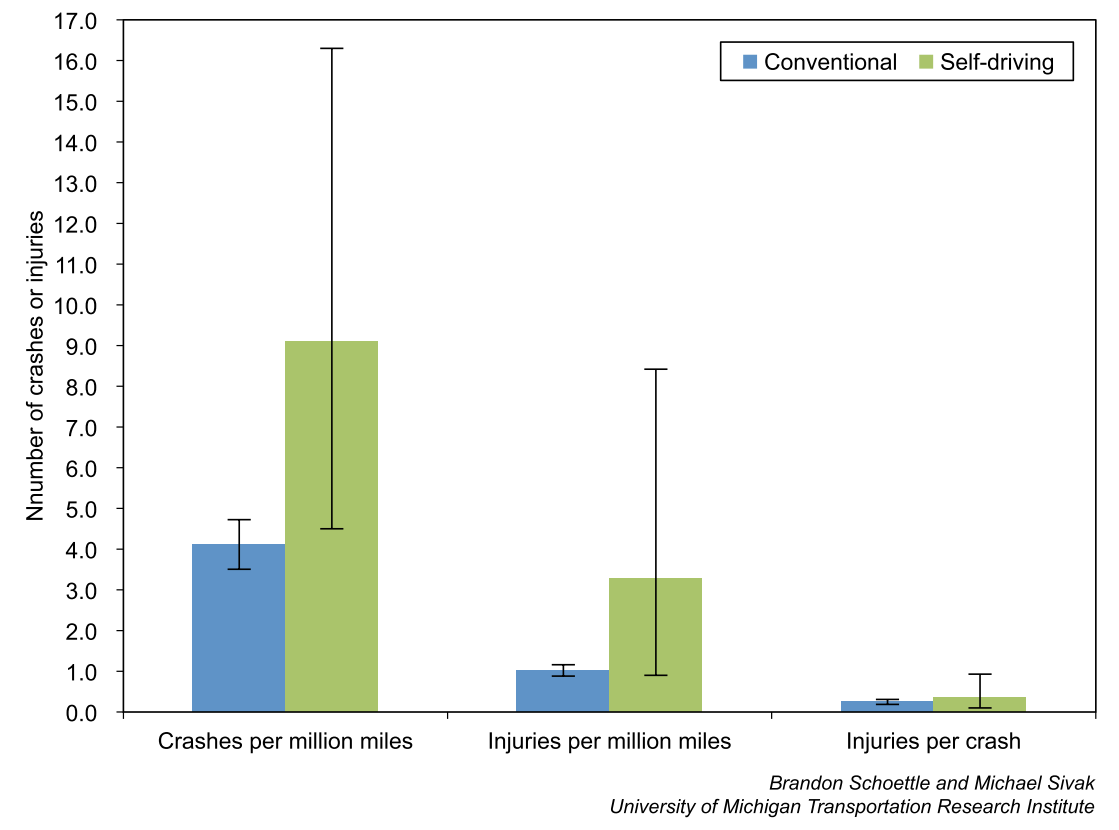
Minimize the risk of harm to oneself and others
Shoettle and Sivak, "A Preliminary Analysis of Real-World Crashes Involving Self-Driving Vehicles" UMTRI-2015-34
Two extremes:
Objective Function
$$R(s_t, a_t) = R_\text{E}(s_t, a_t) + \lambda R_\text{S}(s_t, a_t)$$
Safety
Weight
Efficiency
\[\text{maximize} \quad E \left[ \sum_{t=0}^\infty \gamma^t R(s_t, a_t) \right]\]
Objective Function
Safety
Better Performance
Model \(M_2\), Algorithm \(A_2\)
Model \(M_1\), Algorithm \(A_1\)
Efficiency
$$R(s_t, a_t) = R_\text{E}(s_t, a_t) + \lambda R_\text{S}(s_t, a_t)$$
Safety
Weight
Efficiency
Dynamic Model: Types of Uncertainty
OUTCOME
MODEL
STATE
Markov Model
Markov Decision Process (MDP)
Partially Observable Markov Decision Process (POMDP)
Introduction
UAV Collision Avoidance
Lane Changing with Internal States
Solving Continuous POMDPs
POMDPs.jl
Trusted and Optimized UAV Collision Avoidance
Challenge: Certification
Trusted Resolution Logic
Additional buffer compensates for uncertainty
1.0
1.5
2.0
3.0
4.0
MDP Formulation
Transition: \(\quad \dot{\psi}^{(o)}_t = \frac{g \, \tan \phi^{(o)}_t}{v^{(o)}}\), \(\quad \dot{\psi}^{(i)}_t \sim \mathcal{N}(0, 10^\circ/s)\)
Ownship State
Intruder State
Bank Angle
\(s=\left(x^{(o)}, y^{(o)}, \psi^{(o)}, x^{(i)}, y^{(i)}, \psi^{(i)}, \text{dev}\right)\)
\(a = \phi^{(o)}\), \(\mathcal{A} = \{-45^\circ, -22.5^\circ, 0^\circ, 22.5^\circ, 45^\circ\}\)
\(R(s, a) = -c_\text{step} + r_\text{goal} \, \text{in\_goal}(s) - c_\text{dev} \, \text{dev}(s,a) - \lambda \,\text{nmac}(s) \)
Efficiency
Safety
Solving MDPs and POMDPs - The Value Function
$$\mathop{\text{maximize}} V_\pi(s) = E\left[\sum_{t=0}^{\infty} \gamma^t R(s_t, a_t) \bigm| s_0 = s, a_t = \pi(s_t) \right]$$
$$V^*(s) = \max \left\{R(s, a) + \gamma E\Big[V^*\left(s_{t+1}\right) \mid s_t=s, a_t=a\Big]\right\}$$
Involves all future time
Involves only \(t\) and \(t+1\)
\(a \in \mathcal{A}\)
Features
\[\tilde{V}(s) = \beta(s)^\top \theta\]
\[\tilde{V}_{k+1}(s) = \Pi \mathcal{B}[\tilde{V}_k](s)\]
\(45^\circ\)
\(-45^\circ\)
\(\phi=0^\circ\)
Sunberg, Zachary N., Mykel J. Kochenderfer, and Marco Pavone. "Optimized and trusted collision avoidance for unmanned aerial vehicles using approximate dynamic programming." Robotics and Automation (ICRA), 2016 IEEE International Conference on. IEEE, 2016.
Value Function
Policy
Price of certifiability
Trusted Resolution Logic
Directly Optimized Turn Rate
Sunberg, Zachary N., Mykel J. Kochenderfer, and Marco Pavone. "Optimized and trusted collision avoidance for unmanned aerial vehicles using approximate dynamic programming." Robotics and Automation (ICRA), 2016 IEEE International Conference on. IEEE, 2016.
Maintaining certifiability
\[\tilde{\mathcal{A}}(s) = \left\{a \in \mathcal{A} \mid \text{mindist}(s, a) \geq D_\text{NMAC} \right\}\]
Price of certifiability
Trusted Resolution Logic
Directly Optimized Turn Rate
Trusted Optimized Turn Rate
Introduction
UAV Collision Avoidance
Lane Changing with Internal States
Solving Continuous POMDPs
POMDPs.jl
Sadigh, Dorsa, et al. "Information gathering actions over human internal state." Intelligent Robots and Systems (IROS), 2016 IEEE/RSJ International Conference on. IEEE, 2016.
Schmerling, Edward, et al. "Multimodal Probabilistic Model-Based Planning for Human-Robot Interaction." arXiv preprint arXiv:1710.09483 (2017).
Sadigh, Dorsa, et al. "Planning for Autonomous Cars that Leverage Effects on Human Actions." Robotics: Science and Systems. 2016.
Tweet by Nitin Gupta
29 April 2018
https://twitter.com/nitguptaa/status/990683818825736192
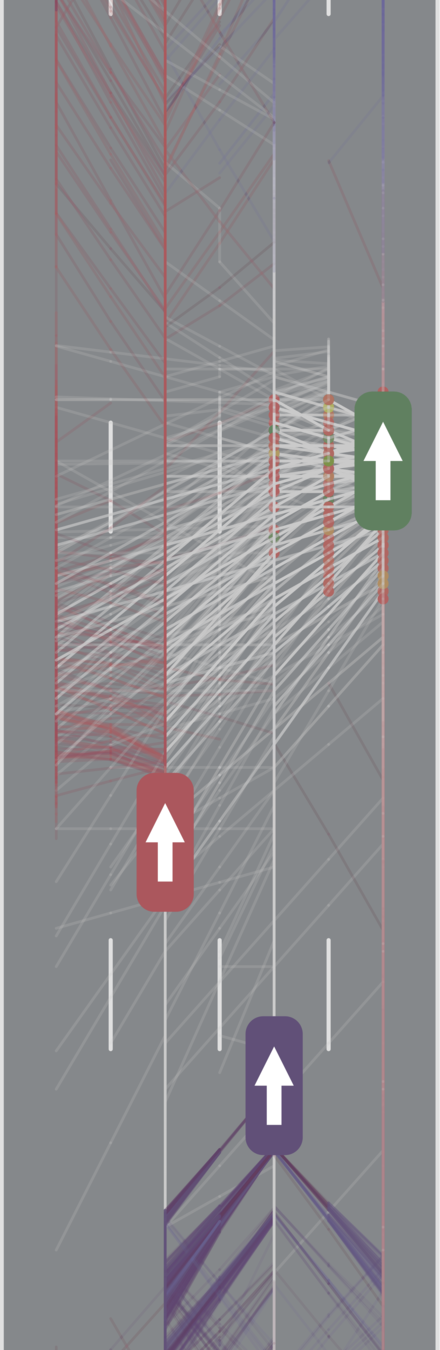
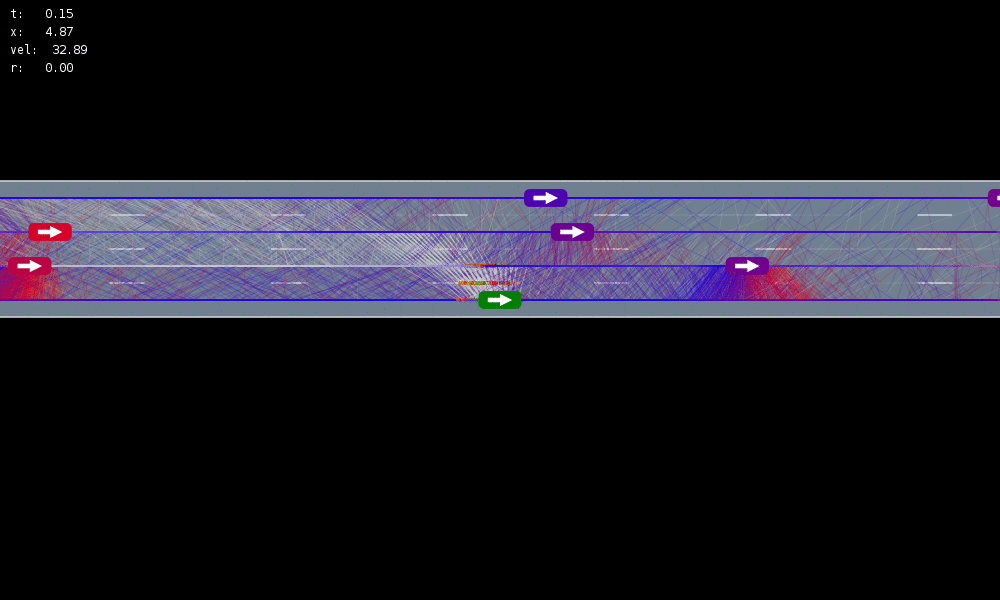
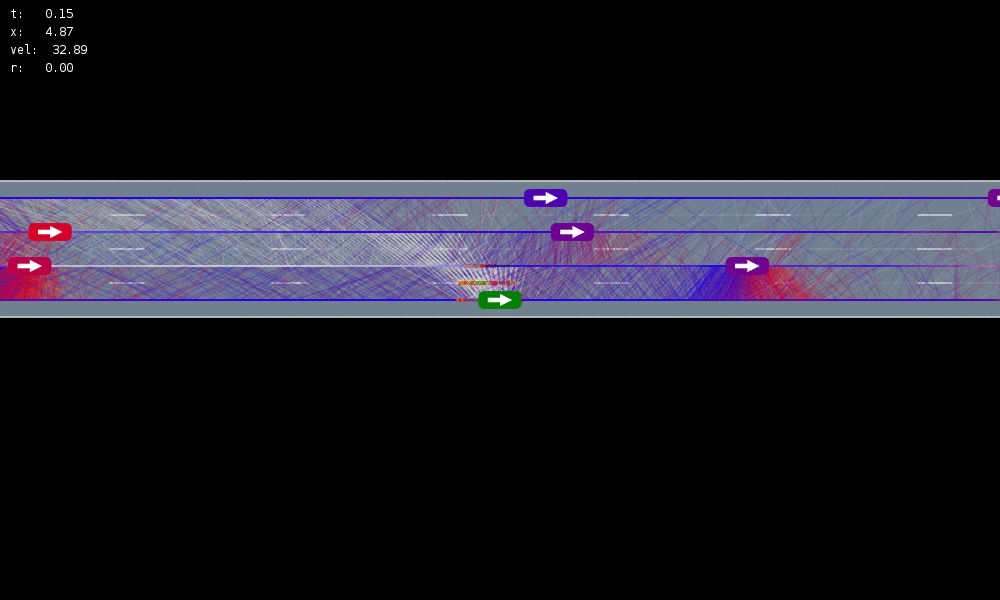
Human Behavior Model: IDM and MOBIL
M. Treiber, et al., “Congested traffic states in empirical observations and microscopic simulations,” Physical Review E, vol. 62, no. 2 (2000).
A. Kesting, et al., “General lane-changing model MOBIL for car-following models,” Transportation Research Record, vol. 1999 (2007).
A. Kesting, et al., "Agents for Traffic Simulation." Multi-Agent Systems: Simulation and Applications. CRC Press (2009).
POMDP Formulation
\(s=\left(x, y, \dot{x}, \left\{(x_c,y_c,\dot{x}_c,l_c,\theta_c)\right\}_{c=1}^{n}\right)\)
\(o=\left\{(x_c,y_c,\dot{x}_c,l_c)\right\}_{c=1}^{n}\)
\(a = (\ddot{x}, \dot{y})\), \(\ddot{x} \in \{0, \pm 1 \text{ m/s}^2\}\), \(\dot{y} \in \{0, \pm 0.67 \text{ m/s}\}\)
Ego physical state
Physical states of other cars
Internal states of other cars
Physical states of other cars
Efficiency
Safety
Belief
History: all previous actions and observations
\[h_t = (b_0, a_0, o_1, a_1, o_2, ..., a_{t-1}, o_t)\]
Belief: probability distribution over \(\mathcal{S}\) encoding everything learned about the state from the history
\[b_t(s) = P(s_t=s \mid h_t)\]
A POMDP is an MDP on the belief space
Solving MDPs and POMDPs - Offline vs Online
Value Iteration
Sequential Decision Trees
QMDP
\[Q_{MDP}(b, a) = \sum_{s \in \mathcal{S}} Q_{MDP}(s,a) b(s) \geq Q^*(b,a)\]
Equivalent to assuming full observability on the next step
Will not take costly exploratory actions
$$Q_\pi(b,a) = E \left[ \sum_{t=0}^{\infty} \gamma^t R(s_t, a_t) \bigm| s_0 = s, a_0 = a\right]$$
All drivers normal
Outcome only
Omniscient
Mean MPC
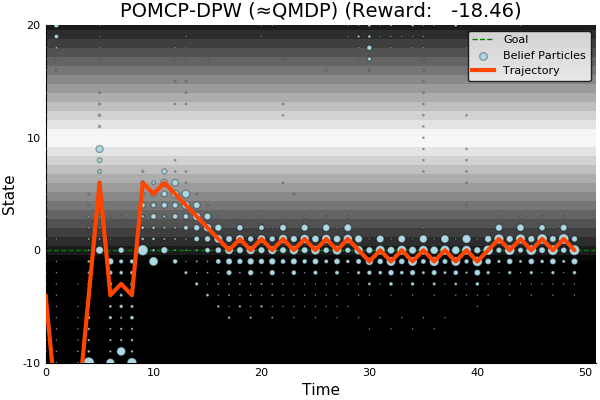
QMDP
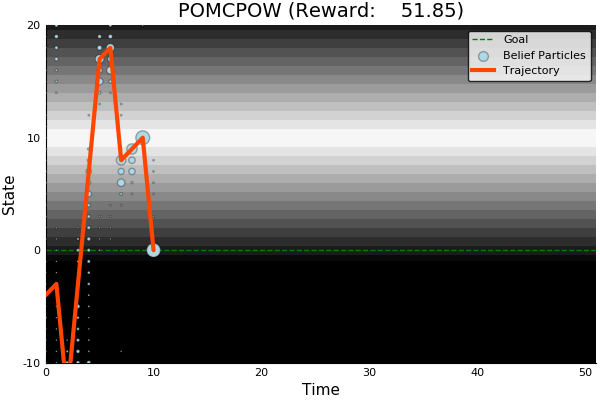
POMCPOW
Simulation results
All drivers normal
Omniscient
Mean MPC
QMDP
POMCPOW
Introduction
UAV Collision Avoidance
Lane Changing with Internal States
Solving Continuous POMDPs
POMDPs.jl
Monte Carlo Tree Search
Image by Dicksonlaw583 (CC 4.0)
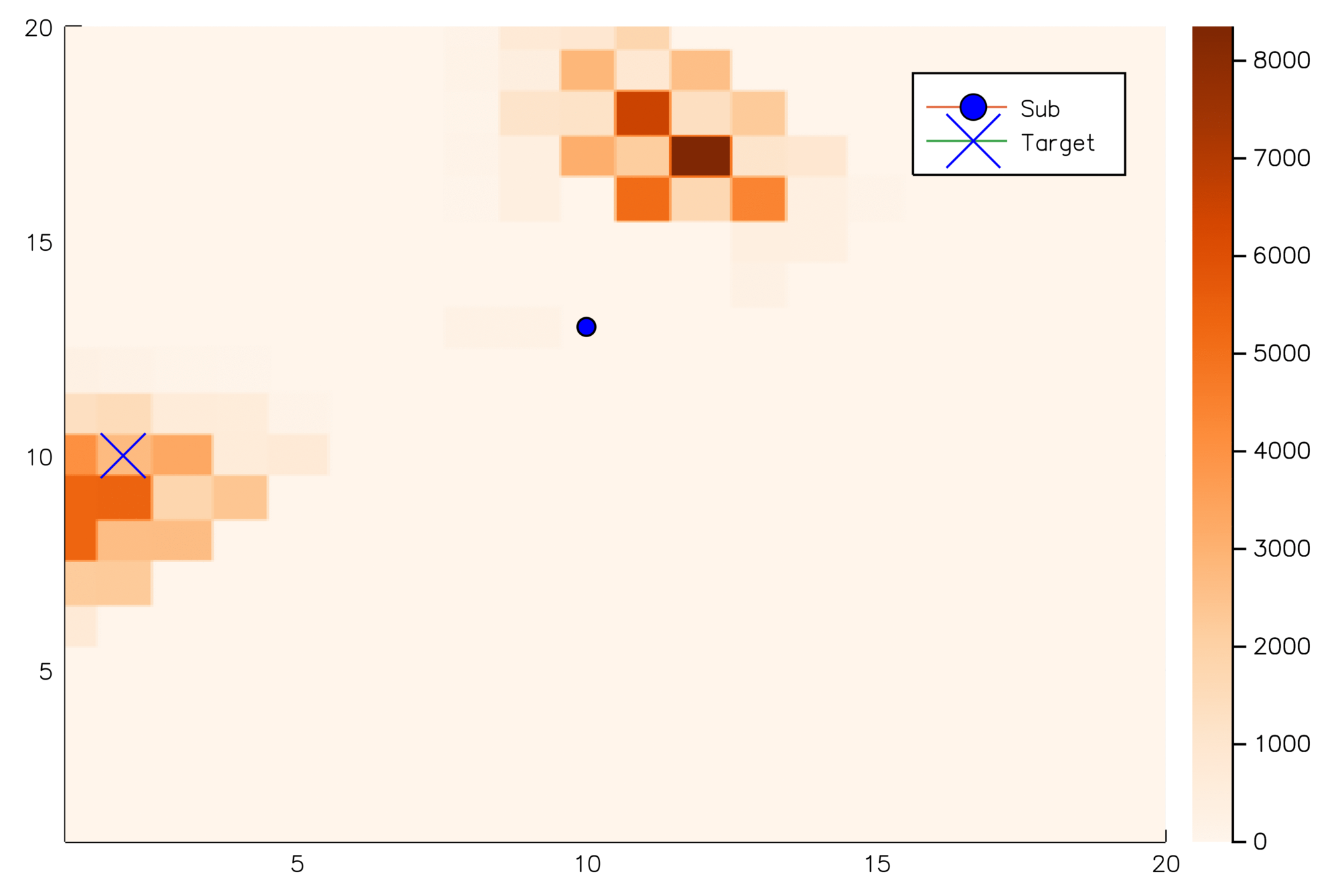
POMCP
Silver, David, and Joel Veness. "Monte-Carlo planning in large POMDPs." Advances in neural information processing systems. 2010.
Ross, Stéphane, et al. "Online planning algorithms for POMDPs." Journal of Artificial Intelligence Research 32 (2008): 663-704.
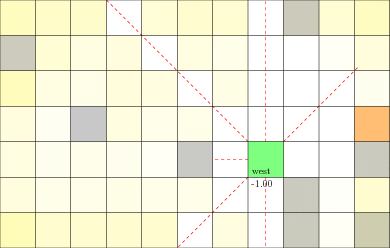
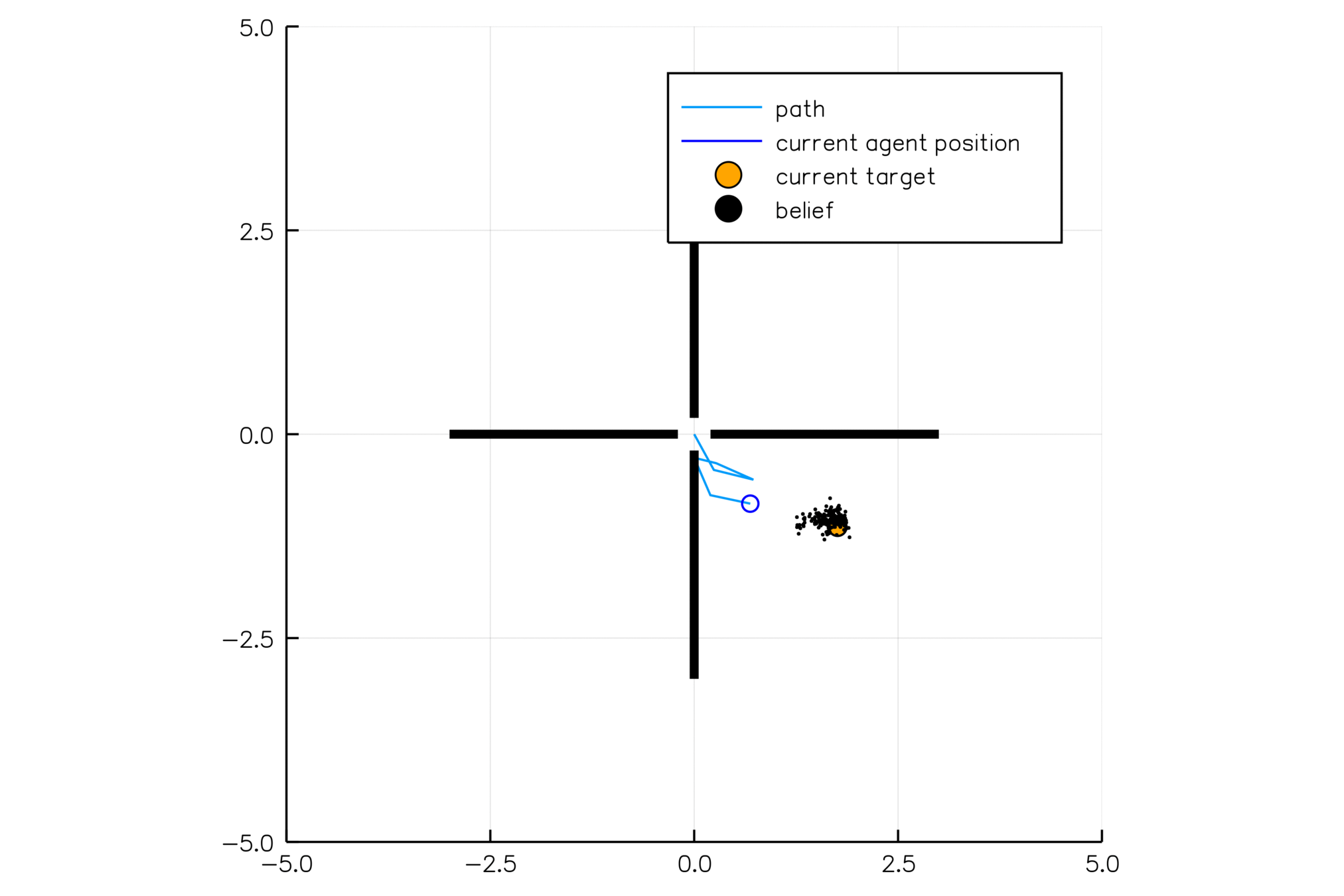
Light-Dark Problem
State
Timestep
Accurate Observations
Goal: \(a=0\) at \(s=0\)
Optimal Policy
Localize
\(a=0\)
[ ] An infinite number of child nodes must be visited
[ ] Each node must be visited an infinite number of times
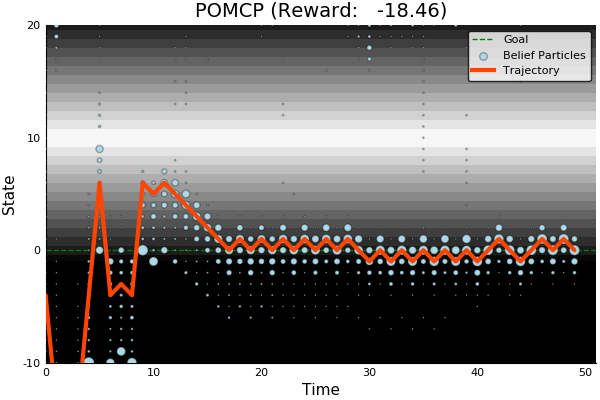
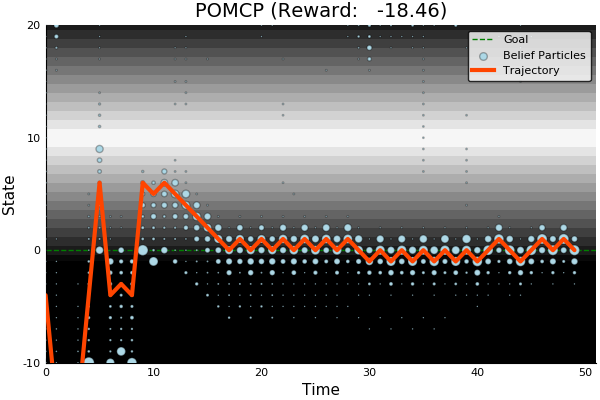
Solving continuous POMDPs - POMCP fails
[1] Adrien Coutoux, Jean-Baptiste Hoock, Nataliya Sokolovska, Olivier Teytaud, Nicolas Bonnard. Continuous Upper Confidence Trees. LION’11: Proceedings of the 5th International Conference on Learning and Intelligent OptimizatioN, Jan 2011, Italy. pp.TBA. <hal-00542673v2>
POMCP
Limit number of children to
\[k N^\alpha\]
Necessary Conditions for Consistency [1]
POMCP
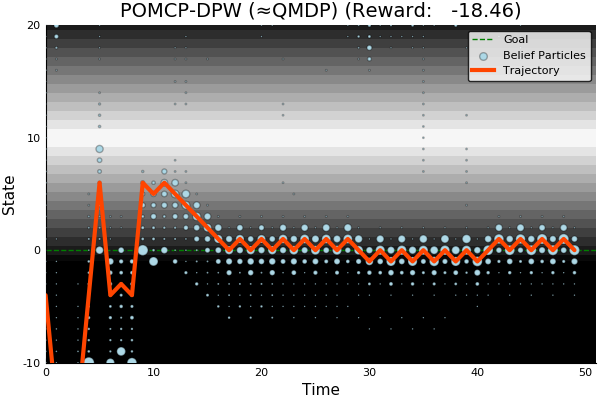
POMCP-DPW
POMCP-DPW converges to QMDP
Proof Outline:
Observation space is continuous → observations unique w.p. 1.
(1) → One state particle in each belief, so each belief is merely an alias for that state
(2) → POMCP-DPW = MCTS-DPW applied to fully observable MDP + root belief state
Solving this MDP is equivalent to finding the QMDP solution → POMCP-DPW converges to QMDP
Sunberg, Z. N. and Kochenderfer, M. J. "Online Algorithms for POMDPs with Continuous State, Action, and Observation Spaces", ICAPS (2018)
POMCP-DPW
[ ] An infinite number of child nodes must be visited
[ ] Each node must be visited an infinite number of times
[ ] An infinite number of particles must be added to each belief node
Necessary Conditions for Consistency
Use \(Z\) to insert weighted particles
POMCP
POMCP-DPW
POMCPOW
Ye, Nan, et al. "DESPOT: Online POMDP planning with regularization." Journal of Artificial Intelligence Research 58 (2017): 231-266.
Introduction
UAV Collision Avoidance
Lane Changing with Internal States
Solving Continuous POMDPs
POMDPs.jl
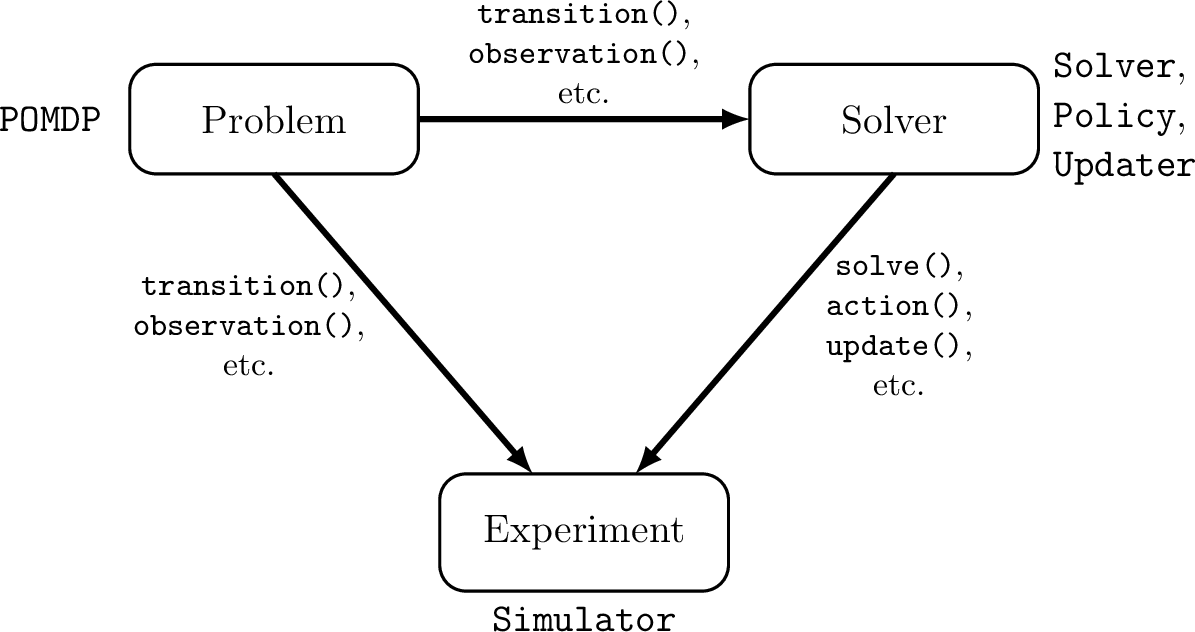
POMDPs.jl - An interface for defining and solving MDPs and POMDPs in Julia
Explicit
Generative
\(s,a\)
\(s', o, r\)
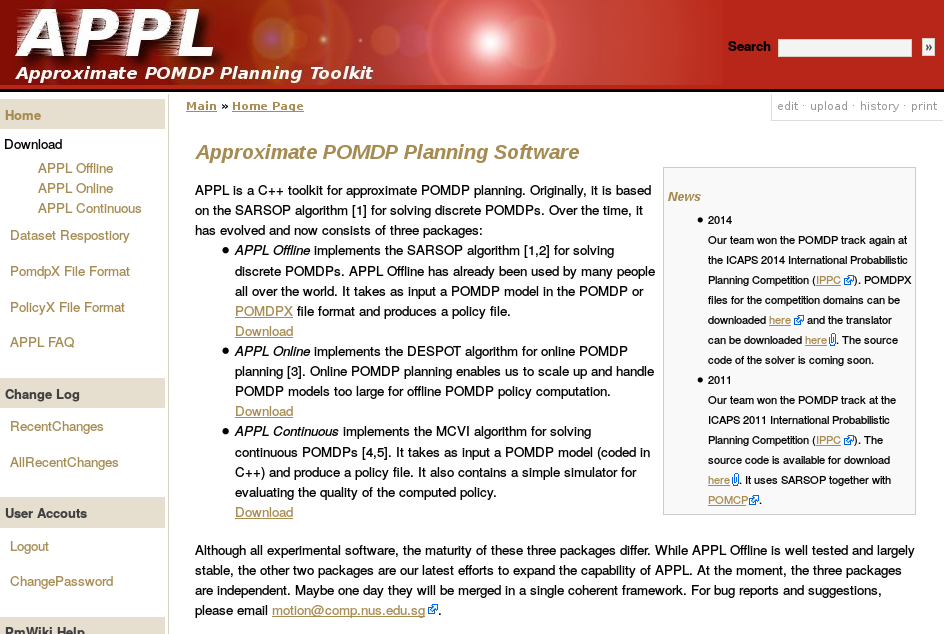
Previous C++ framework: APPL
"At the moment, the three packages are independent. Maybe one day they will be merged in a single coherent framework."
The content of my thesis reflects my opinions and conclusions, and is not necessarily endorsed by these organizations.
Chris Gerdes
Dorsa Sadigh
Mac Schwager
Dan DeBra
Jon Rogers
Suman Chakravorty
Marco Pavone
Mykel Kochenderfer