ICAPS 2018
TU Delft
June 24-29, 2018

ICAPS Conference
- Medium Size (Usually 2 tracks going on)
- High (but \(<\infty\)) PDDL:Deep Neural Network Ratio
- Lots of provided food
- Good doctoral consortium
- Delft: A Dutch college town


An On-Line Planner for POMDPs with Large
Discrete Action Space: A Quantile-Based Approach

Main Idea:
Use a cross entropy-like method to choose which action nodes to explore.
Erli Wang, Hanna Kurniawati, Dirk Kroese
Effective Footstep Planning for Humanoids Using Homotopy-Class Guidance
Vinitha Ranganeni, Oren Salzman, Maxim Likhachev


Main Idea:
Use user-defined homotopy paths to create good heuristics for A*
Lazy Receding Horizon A* for Efficient Path Planning
in Graphs with Expensive-to-Evaluate Edges
Aditya Mandalika, Oren Salzman, Siddhartha Srinivasa
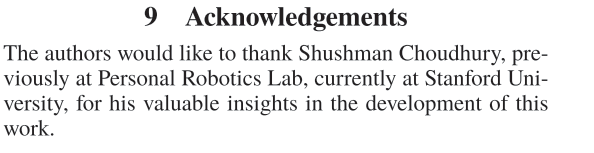
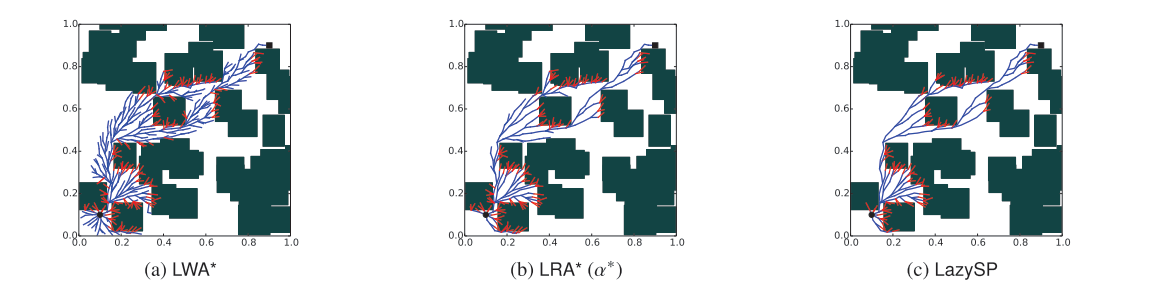
Main Idea:
Balance edge evaluations and graph operations for minimum run time
Amsterdam



Dutch Speeding Ticket
Wittenberg

Fort Loncin, Belgium

Berlin

Witnica, Poland

https://www.facebook.com/dariuszedward.jaworski/videos/2025891547482397/