








russtedrake PRO
Roboticist at MIT and TRI
Russ Tedrake
CSAIL's 60th
June 27, 2023
"What's still hard for AI" by Kai-Fu Lee:
Manual dexterity
Social intelligence (empathy/compassion)
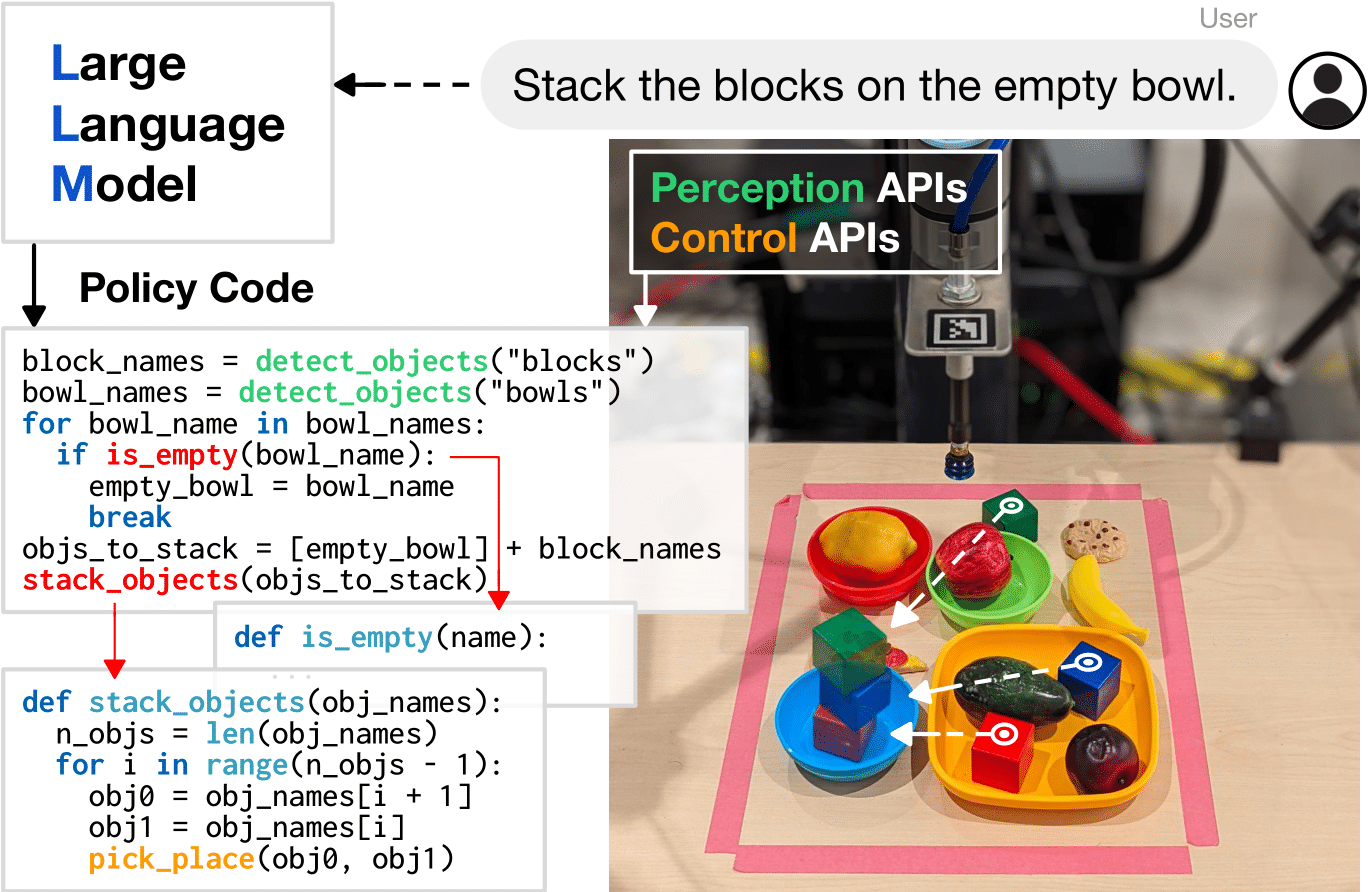
Key advance:
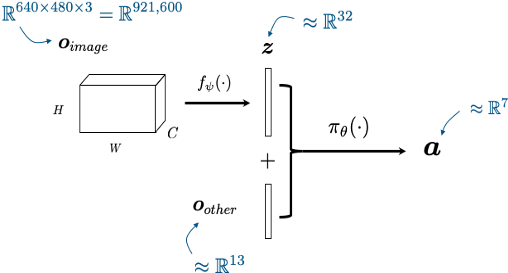
Levine*, Finn*, Darrel, Abbeel, JMLR 2016
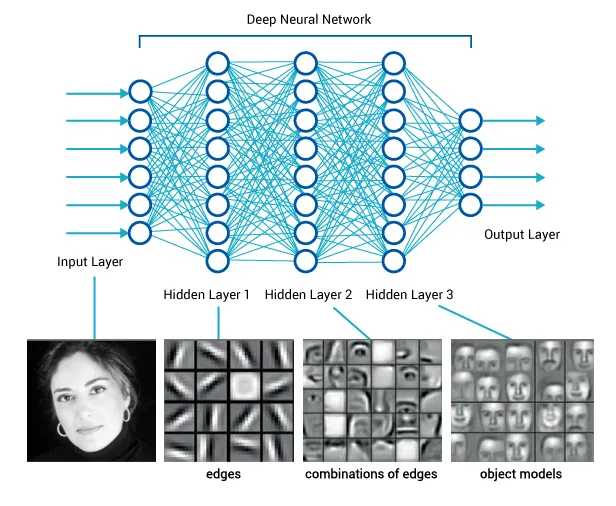
perception network
(often pre-trained)
policy network
other robot sensors
learned state representation
actions
OpenAI - Learning Dexterity
"And then … BC methods started to get good. Really good. So good that our best manipulation system today mostly uses BC ..."
Senior Director of Robotics at Google DeepMind
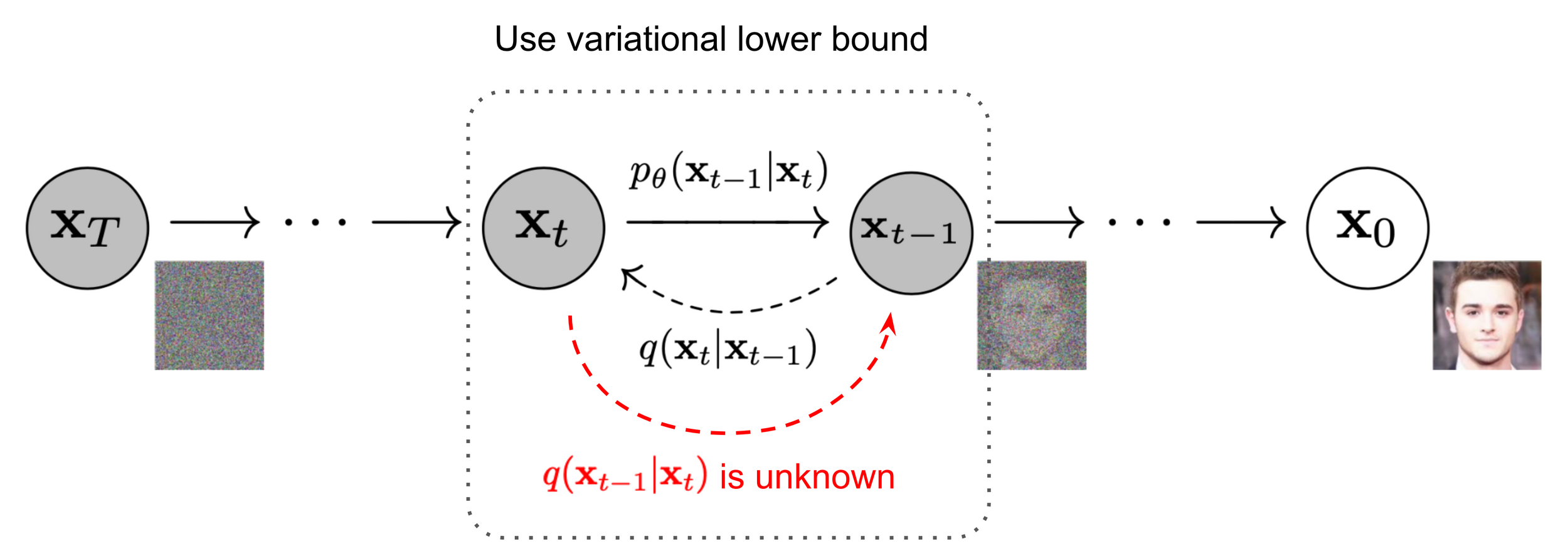
Image source: Ho et al. 2020
e.g. to deal with "multi-modal demonstrations"
ours
prior art
pip install drake
sudo apt install drakehttp://manipulation.mit.edu
http://underactuated.mit.edu
By russtedrake
CSAIL at 60: AI Frontiers & Implications


