Large Behavior Models
(Foundation models for dexterous manipulation)
Russ Tedrake
CSAIL Alliances Meeting
April 4, 2024



Goal: Foundation Models for Manipulation
LLMs \(\Rightarrow\) VLMs \(\Rightarrow\) LBMs
large language models
visually-conditioned language models
large behavior models
\(\sim\) VLA (vision-language-action)
\(\sim\) EFM (embodied foundation model)
Q: Is predicting actions fundamentally different?
Why actions (for dexterous manipulation) could be different:
- Actions are continuous (language tokens are discrete)
- Have to obey physics, deal with stochasticity
- Feedback / stability
- ...
should we expect similar generalization / scaling-laws?
Recent success in (single-task) behavior cloning suggests that these are not blockers
but we don't have internet-scale action data yet.
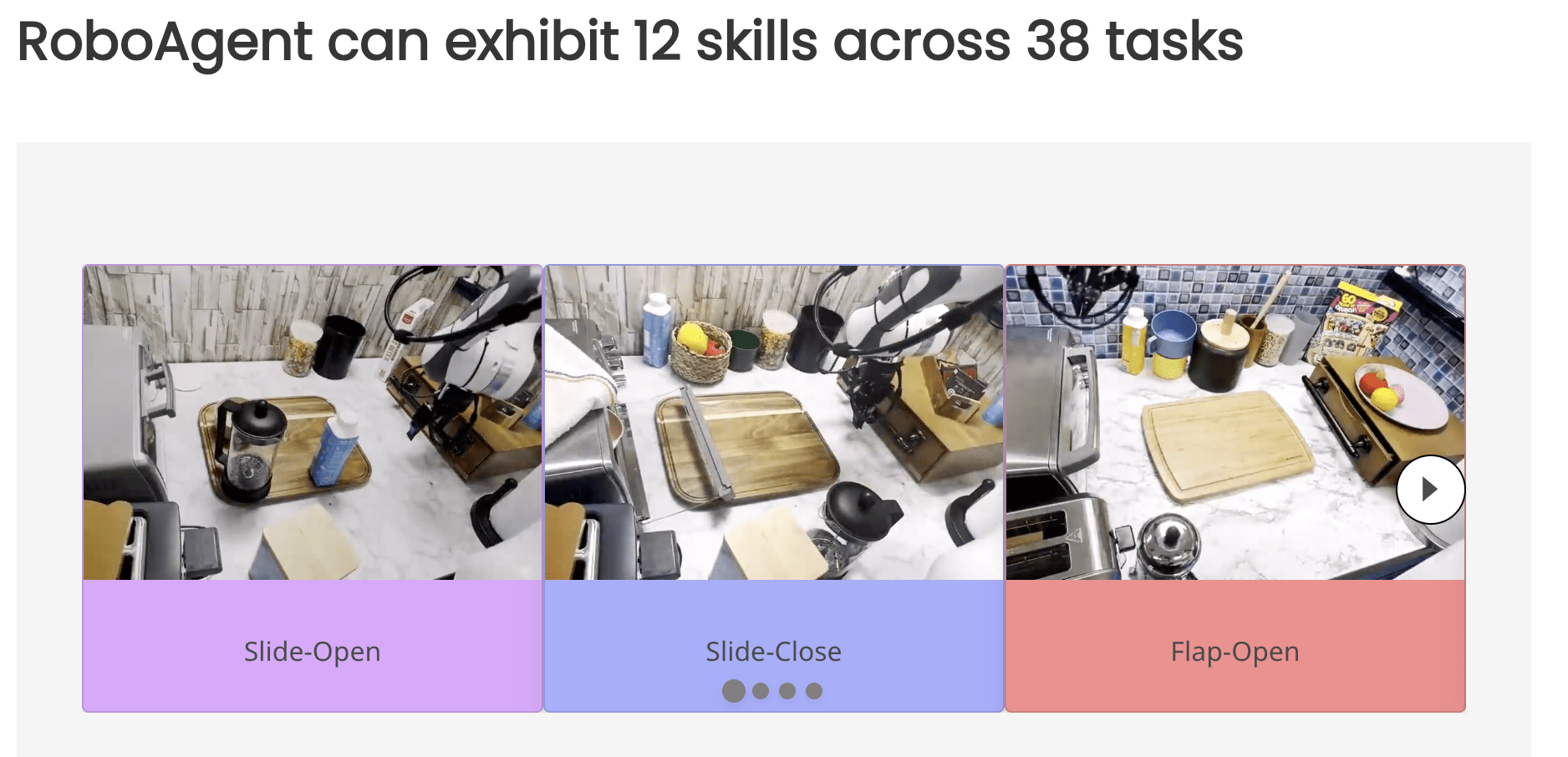
The Robot Data Diet

Big data
Big transfer
Small data
No transfer
Ego-Exo
robot teleop

(the "transfer learning bet")
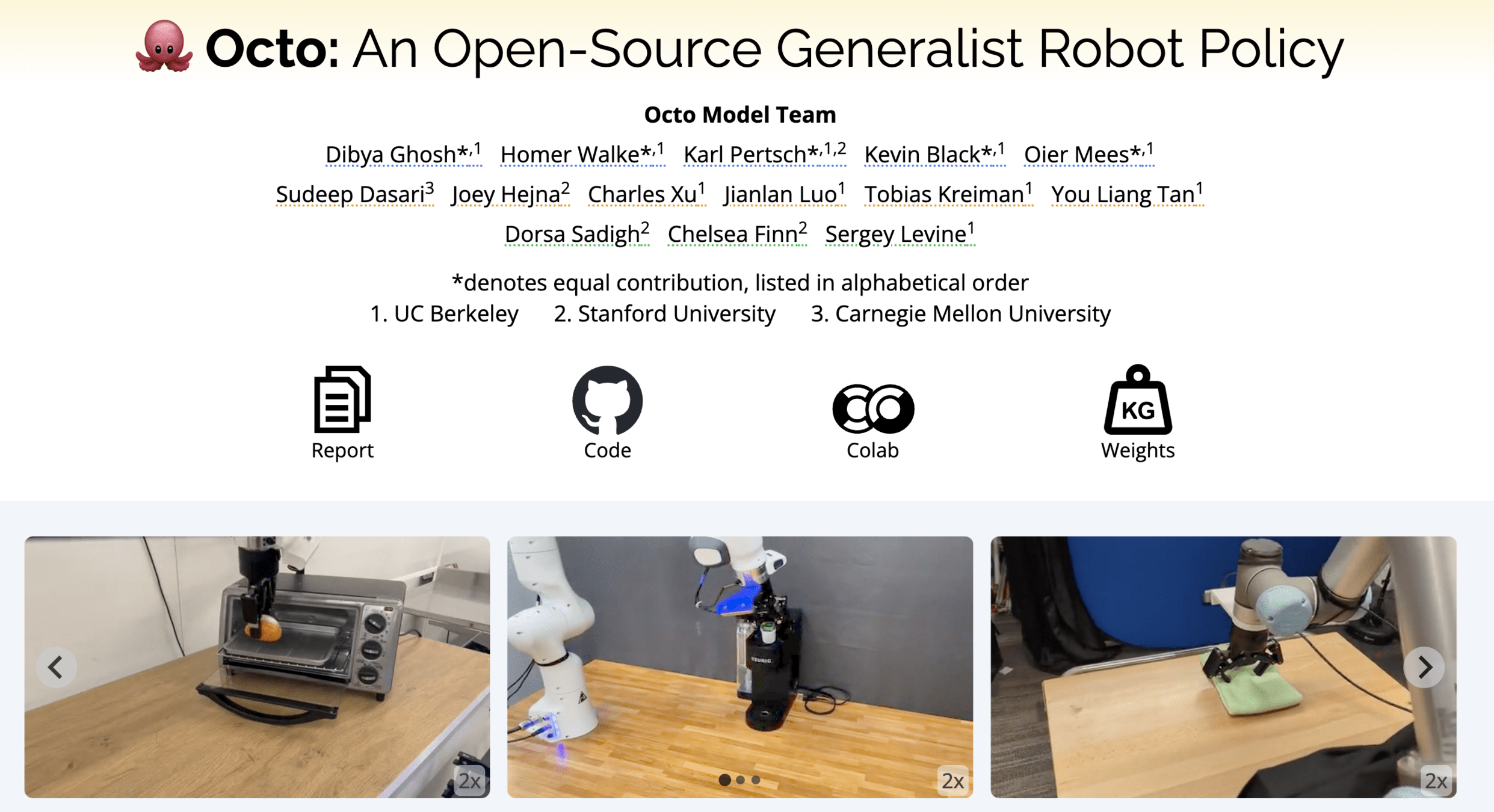
Open-X
simulation rollouts

World-class simulator for robotics

NVIDIA selected Drake and MuJoCo
(for potential inclusion in Omniverse)
"Hydroelastic contact" as implemented in Drake
The AlphaGo Playbook
- Step 1: Behavior Cloning
- from human expert games
- Step 2: Self-play
- Policy network
- Value network
- Monte Carlo tree search (MCTS)

Scaling Monte-Carlo Tree Search


"Graphs of Convex Sets" (GCS)
Online classes (videos + lecture notes + code)
http://manipulation.mit.edu