Basic Pick and Place

Follow live at https://slides.com/d/0rMVTi4/live
(or later at https://slides.com/russtedrake/fall23-lec05)
MIT 6.4210/2: Robotic Manipulation
Fall 2023, Lecture 5
(part 3)
Basic Pick and Place
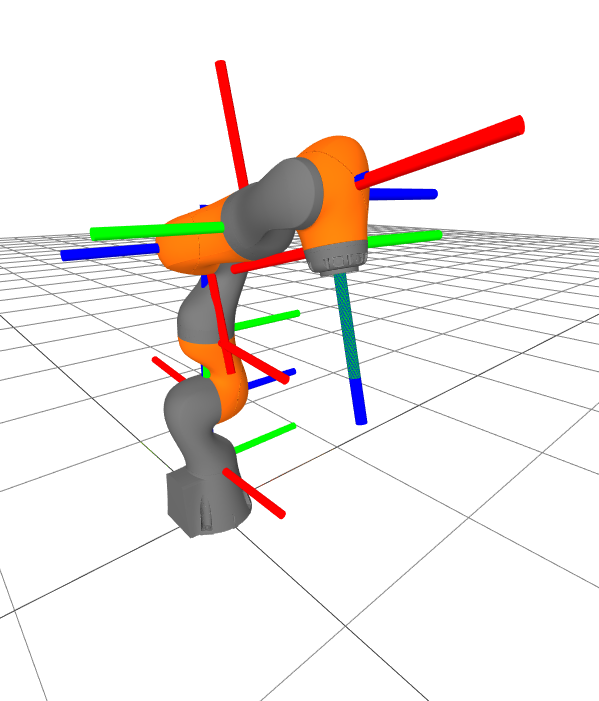
Step 1: Kinematic Frames / Spatial Algebra
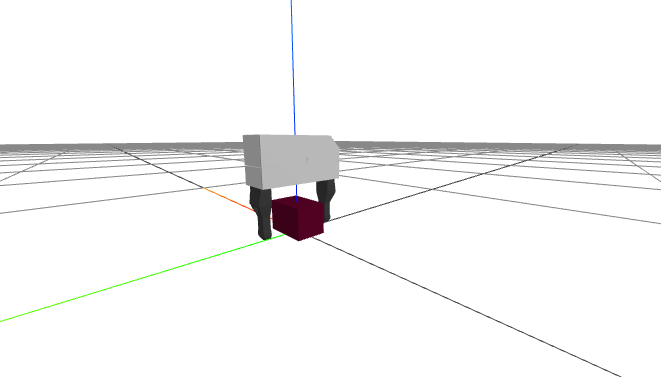
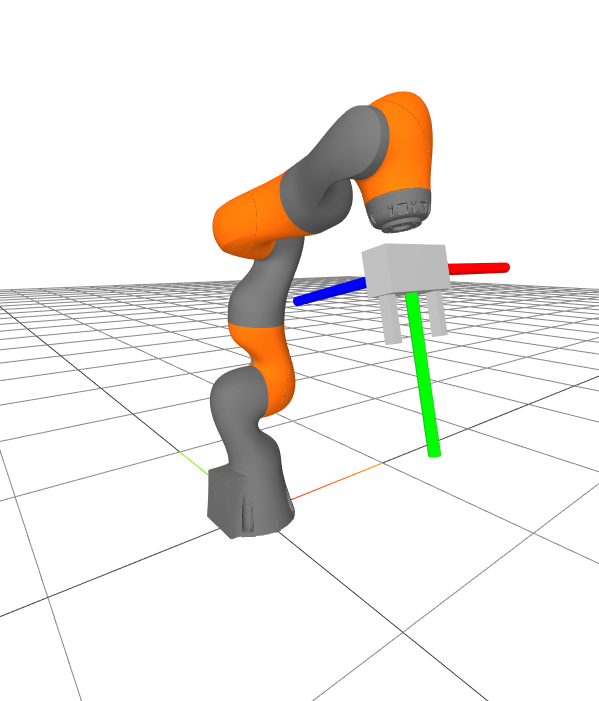
Step 2: Gripper Frame Plan "Sketch"
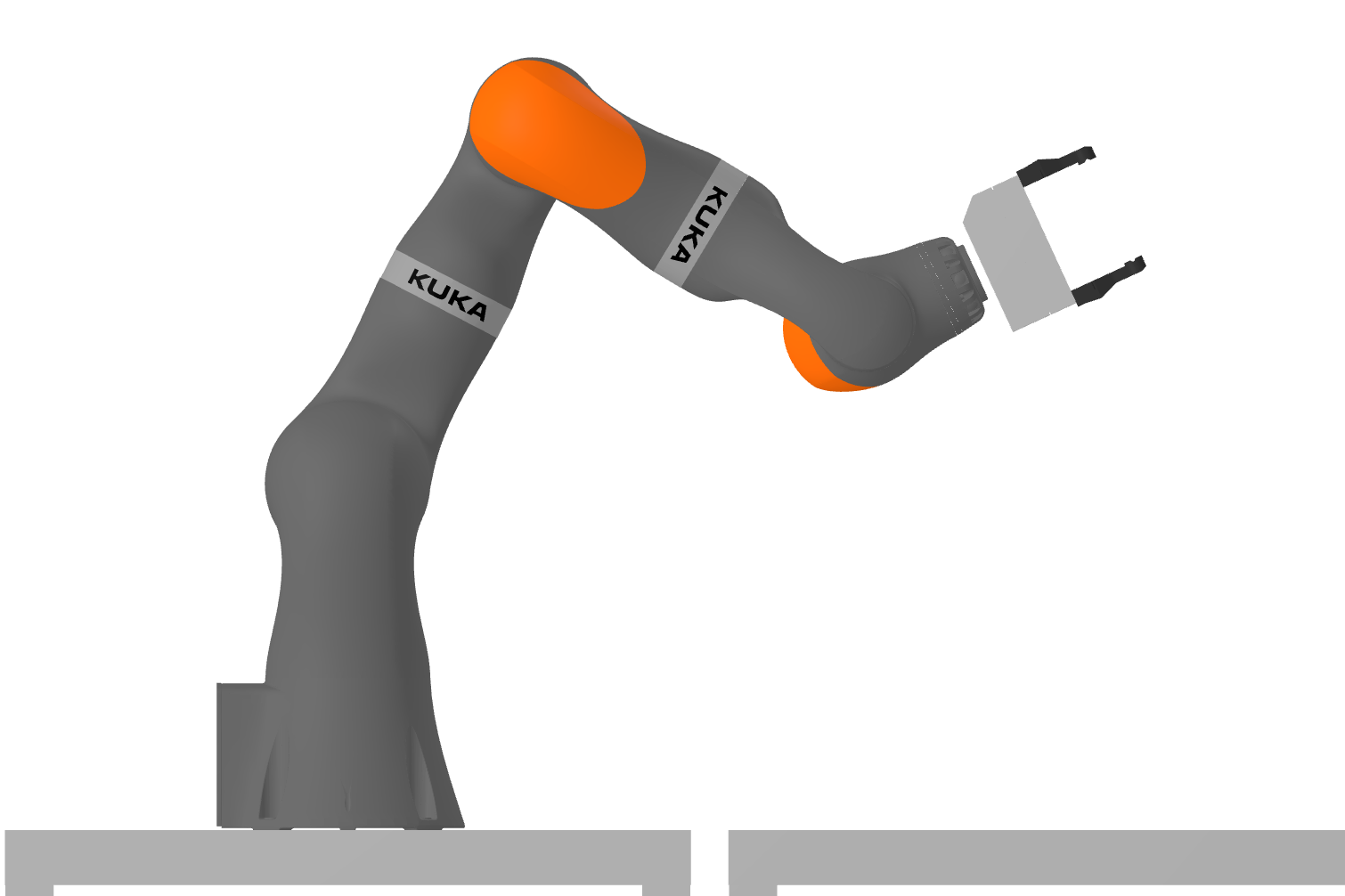
Step 3: Forward kinematics of the iiwa + WSG
Step 4: Differential Inverse Kinematics

Kinematic Jacobian: \( {}^WV^G = J^{G}(q) v \)
\( v = [J^{G}(q)]^{+} {}^WV^G \)
spatial velocity
generalized velocity
Kinematics
- Forward kinematics: joint positions \(\Rightarrow\) pose
- Inverse kinematics*: pose \(\Rightarrow\) joint positions
-
Differential kinematics:
joint positions, velocities \(\Rightarrow\) spatial velocity
-
Differential inverse kinematics:
spatial velocity, joint positions \(\Rightarrow\) joint velocities
q \Rightarrow X^B
X^B \Rightarrow q
q, v \Rightarrow V^B
V^B, q \Rightarrow v
Our first Jacobian pseudo-inverse controller
\( v = [J^{G}(q)]^{+}\,{}^WV^G \)
prog = MathematicalProgram()
x = prog.NewContinuousVariables(2)
prog.AddConstraint(x[0] + x[1] == 1)
prog.AddConstraint(x[0] <= x[1])
prog.AddCost(x[0] ** 2 + x[1] ** 2)
result = Solve(prog)