




russtedrake PRO
Roboticist at MIT and TRI
MIT 6.421:
Robotic Manipulation
Fall 2023, Lecture 7
Follow live at https://slides.com/d/kbcw1PY/live
(or later at https://slides.com/russtedrake/fall23-lec07)
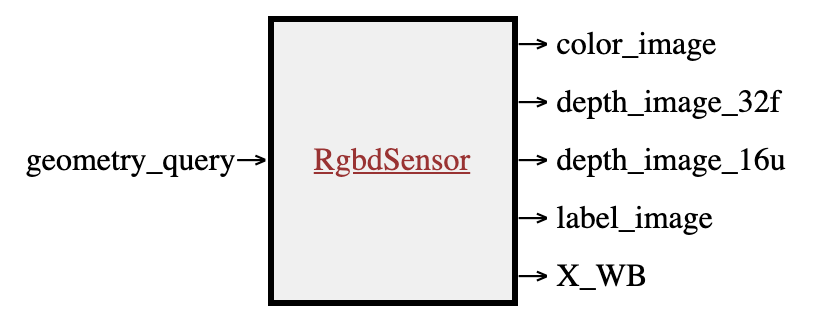
from the docs: "Each pixel in the output image from depth_image is a 16bit unsigned short in millimeters."
directives:
- add_model:
name: mustard
file: package://drake/manipulation/models/ycb/sdf/006_mustard_bottle.sdf
- add_weld:
parent: world
child: mustard::base_link_mustard
X_PC:
translation: [0, 0, 0.09515]
rotation: !Rpy { deg: [-90, 0, -90]}
- add_model:
name: camera
file: package://manipulation/camera_box.sdf
- add_weld:
parent: world
child: camera::base
X_PC:
translation: [0.5, 0.1, 0.2]
# Point slightly down towards camera
# RollPitchYaw(0, -0.2, 0.2) @ RollPitchYaw(-np.pi/2, 0, np.pi/2)
rotation: !Rpy { deg: [-100, 0, 100] }
cameras:
main_camera:
name: camera0
X_PB:
base_frame: camera::baseAdd cameras
MultibodyPlant
SceneGraph
RgbdSensor
DepthImageToPointCloud
MeshcatPointCloudVisualizer
figure from Chris Sweeney et al. ICRA 2019.
"Partial views"
two on wrist
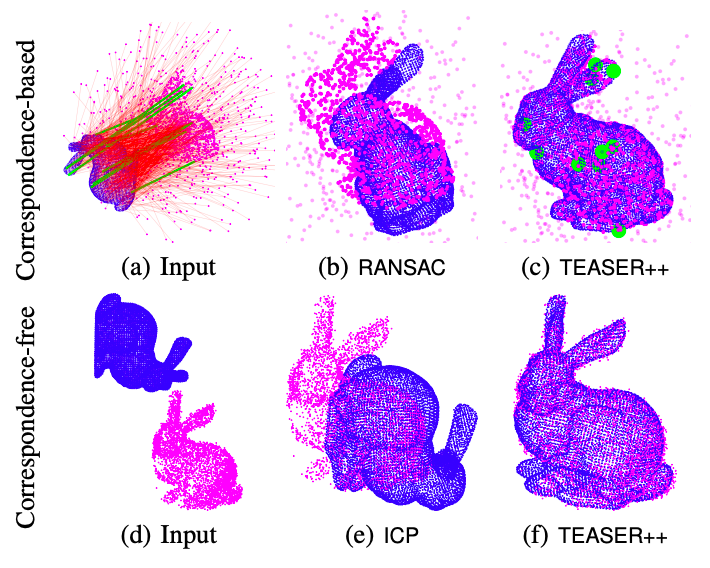
H. Yang, J. Shi, and L. Carlone, “TEASER: Fast and Certifiable Point Cloud Registration”, IEEE Transactions on Robotics (T-RO), 2020.
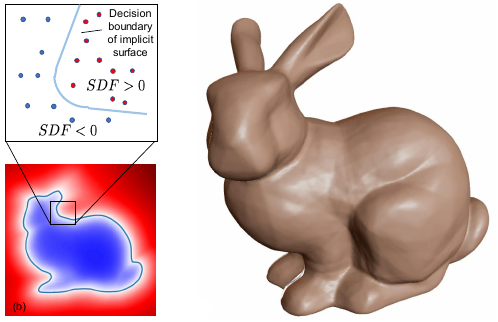
DeepSDF: Learning Continuous Signed Distance Functions for Shape Representation
Jeong Joon Park, Peter Florence, Julian Straub, Richard Newcombe, Steven Lovegrove
prog = MathematicalProgram()
# x is a symbolic variable
x = prog.NewContinuousVariables(2)
# numerical, pass in the coefficients:
# x'Qx + b'x + c
prog.AddQuadraticCost(Q, b, c, x)
# symbolic:
prog.AddCost(x.dot(x))
prog.AddQuadraticCost(x.dot(x))
# autodiff:
def my_cost(x):
return x.dot(x)
prog.AddCost(my_cost, x)
# Adding autodiff costs/constraints => Solve(prog) will
# pick a nonlinear optimization solver prog = MathematicalProgram()
p = prog.NewContinuousVariables(2, 'p')
theta = prog.NewContinuousVariables(1, 'theta')
def position_model_in_world(vars, i):
[p, theta] = np.split(vars, [2])
R = np.array([[np.cos(theta[0]), -np.sin(theta[0])],
[np.sin(theta[0]), np.cos(theta[0])]])
p_Wmci = p + R @ p_Omc[:,i]
return p_Wmci
def squared_distance(vars, i):
p_Wmci = position_model_in_world(vars, i)
err = p_Wmci - p_s[:,i]
return err.dot(err)
for i in range(Ns):
# forall i, |p + R*p_Omi - p_si|²
prog.AddCost(partial(squared_distance, i=i),
np.concatenate([p[:], theta]))
# forall i, p + R*p_Omi >= 0.
prog.AddConstraint(partial(position_model_in_world, i=i),
vars=np.concatenate([p[:], theta]),
lb=[0, 0], ub=[np.inf, np.inf])
result = Solve(prog)Gaussian splatting, too
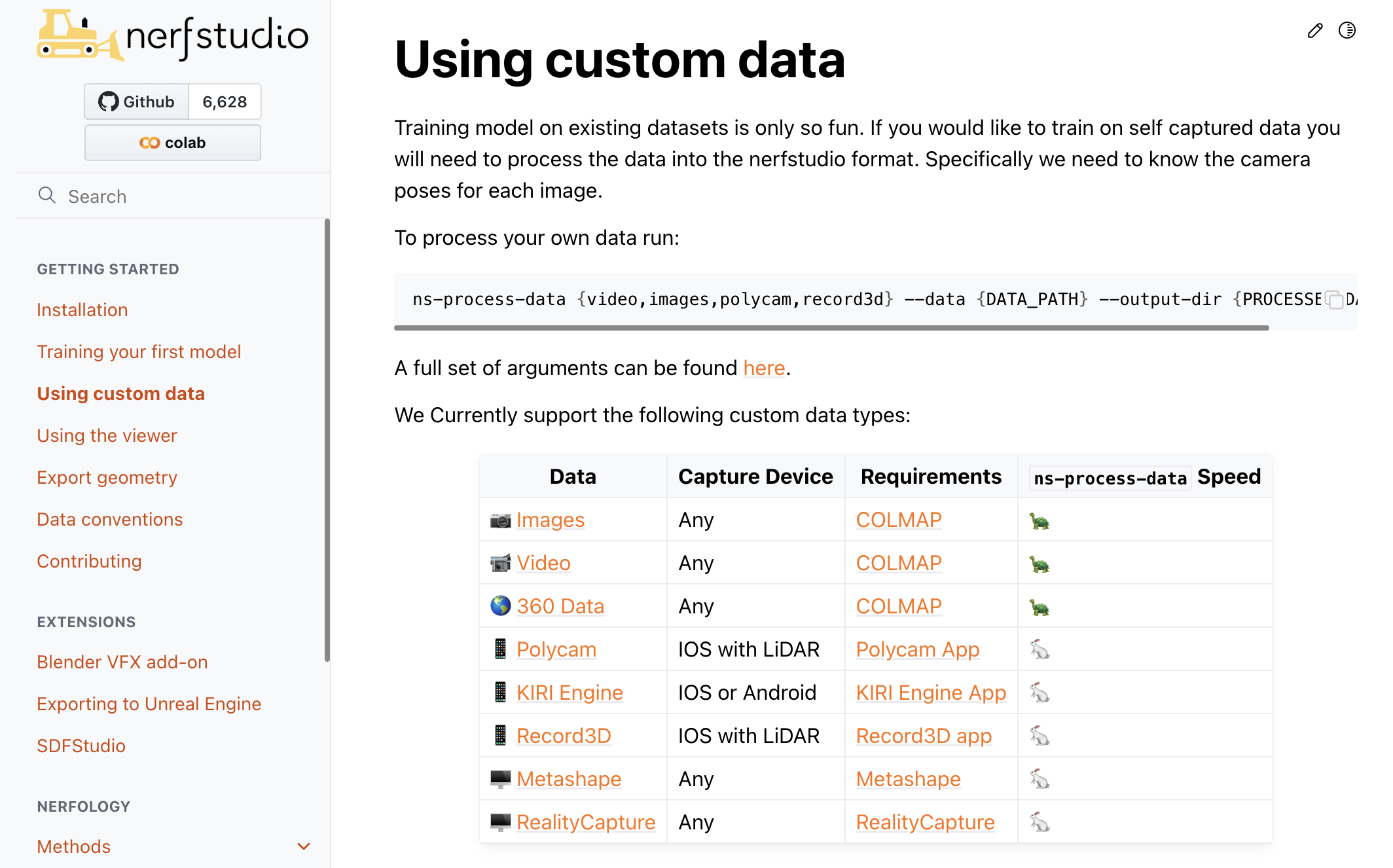
nerfstudio uses COLMAP
By russtedrake
MIT Robotic Manipulation Fall 2020 http://manipulation.csail.mit.edu


