












russtedrake PRO
Roboticist at MIT and TRI
Part II: Sampling-based
and global optimization
MIT 6.421
Robotic Manipulation
Fall 2023, Lecture 12
Follow live at https://slides.com/d/BghMcig/live
(or later at https://slides.com/russtedrake/fall23-lec12)
start
goal
start
goal
fixed number of samples
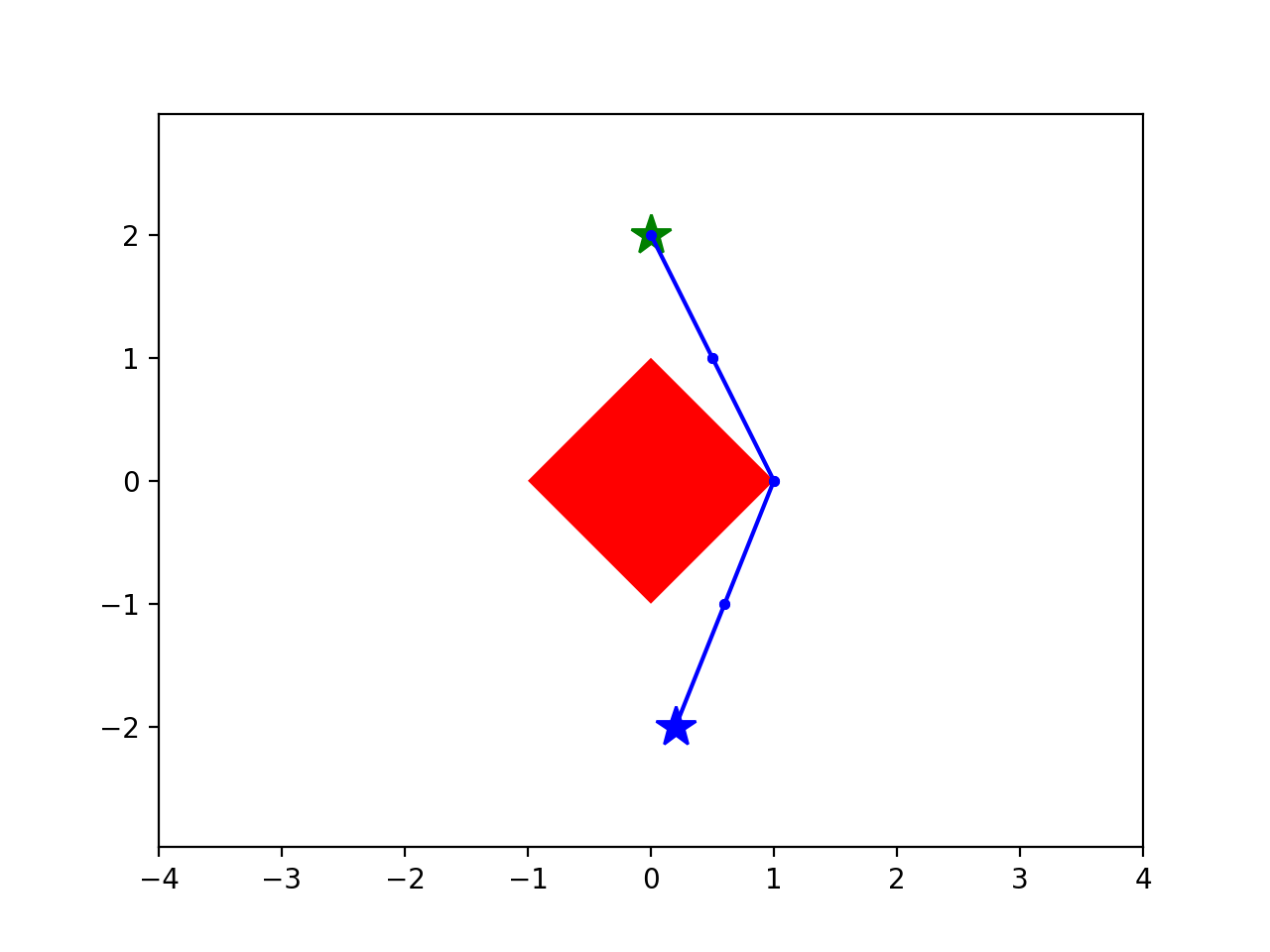
collision-avoidance
(outside the \(L^1\) ball)
nonconvex
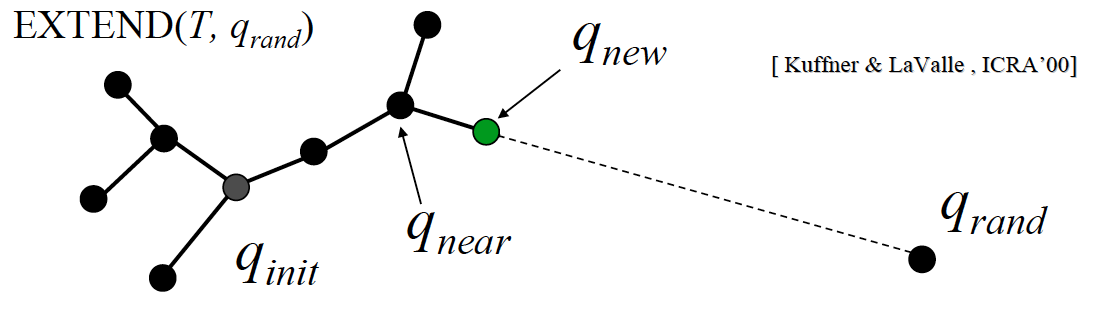
BUILD_RRT (qinit) {
T.init(qinit);
for k = 1 to K do
qrand = RANDOM_CONFIG();
EXTEND(T, qrand)
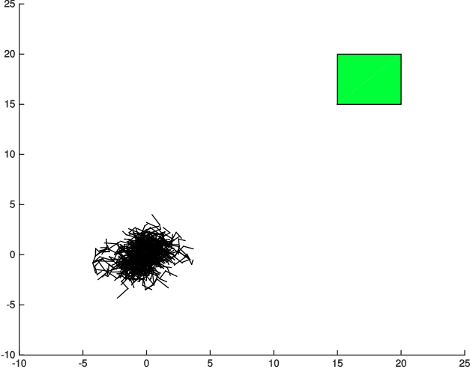
}Naive Sampling
RRTs have a "Voronoi-bias"
goal
start
Amato, Nancy M., and Yan Wu. "A randomized roadmap method for path and manipulation planning." Proceedings of IEEE international conference on robotics and automation. Vol. 1. IEEE, 1996.
"Multi-query" planner separates:
BUILD_ROADMAP () {
V = {}, E = {}
for k = 1 to K
repeat
q = RANDOM_CONFIG()
until q is collision free
V.insert(q)
for all q in V
for all qn in NearestNeighbors(q, V)
if {q,qn} is collision free
E.insert({q,qn})
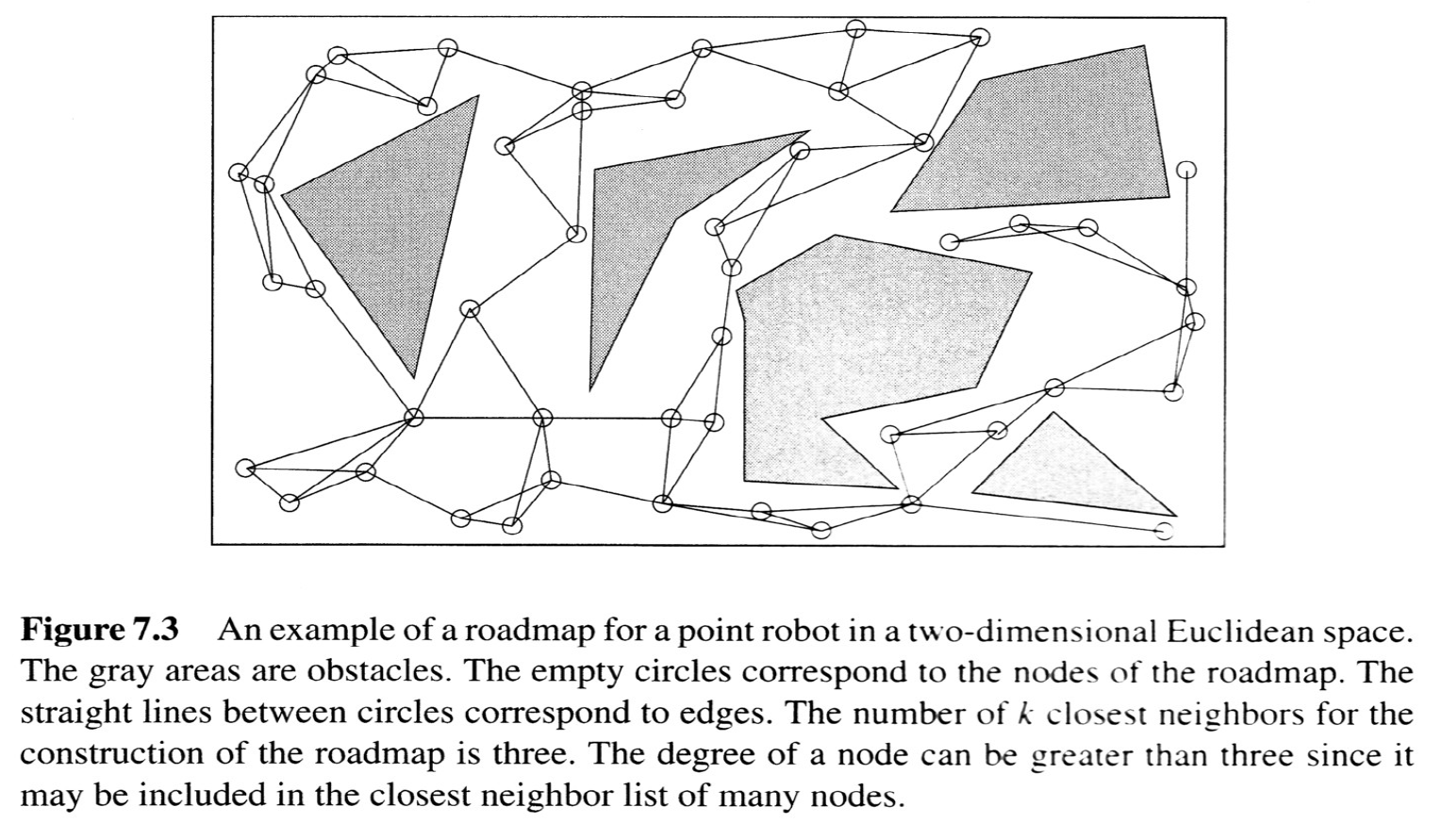
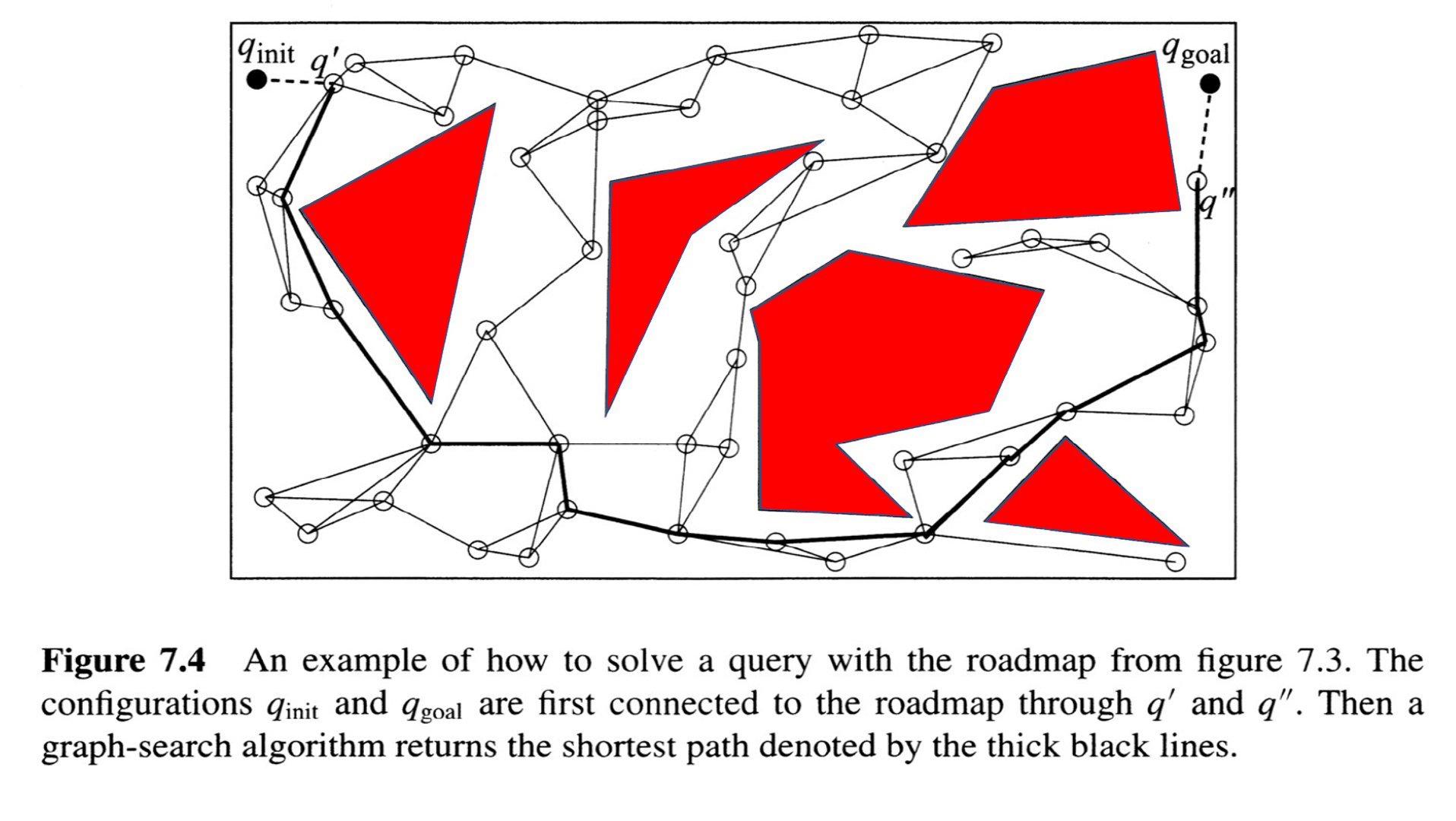
}The Probabilistic Roadmap (PRM)
from Choset, Howie M., et al. Principles of robot motion: theory, algorithms, and implementation. MIT press, 2005.
The Probabilistic Roadmap (PRM)
from Choset, Howie M., et al. Principles of robot motion: theory, algorithms, and implementation. MIT press, 2005.
Google "drake+ompl" to find some examples (on stackoverflow) of drake integration in C++. Using the python bindings should work, too.
/// Plans a path using a bidirectional RRT from start to goal.
PlanningResult PlanBiRRTPath(
const Eigen::VectorXd& start, const Eigen::VectorXd& goal,
const BiRRTPlannerParameters& parameters,
const CollisionCheckerBase& collision_checker,
const std::unordered_set<drake::multibody::BodyIndex>& ignored_bodies,
StateSamplingInterface<Eigen::VectorXd>* sampler);
/// Bidirectional T-RRT planner.
CostPlanningResult PlanTRRTPath(
const CostPlanningStateType& start, const Eigen::VectorXd& goal,
const TRRTPlannerParameters& parameters,
const CollisionCheckerBase& collision_checker,
const std::unordered_set<drake::multibody::BodyIndex>& ignored_bodies,
const MotionCostFunction& motion_cost_function,
StateSamplingInterface<Eigen::VectorXd>* sampler);
/// Roadmap creation and updating for kinematic PRM planning.
/// Generate a roadmap.
Graph<Eigen::VectorXd> BuildRoadmap(
int64_t roadmap_size, int64_t num_neighbors,
const CollisionCheckerBase& collision_checker,
const std::unordered_set<drake::multibody::BodyIndex>& ignored_bodies,
StateSamplingInterface<Eigen::VectorXd>* sampler);
/// Plans a path through the provided roadmap. In general, you should use the
/// *AddingNodes versions whenever possible to avoid copies of roadmap.
PlanningResult PlanPRMPath(
const Eigen::VectorXd& start, const Eigen::VectorXd& goal,
int64_t num_neighbors, const CollisionCheckerBase& collision_checker,
const std::unordered_set<drake::multibody::BodyIndex>& ignored_bodies,
const Graph<Eigen::VectorXd>& roadmap, bool parallelize = true);
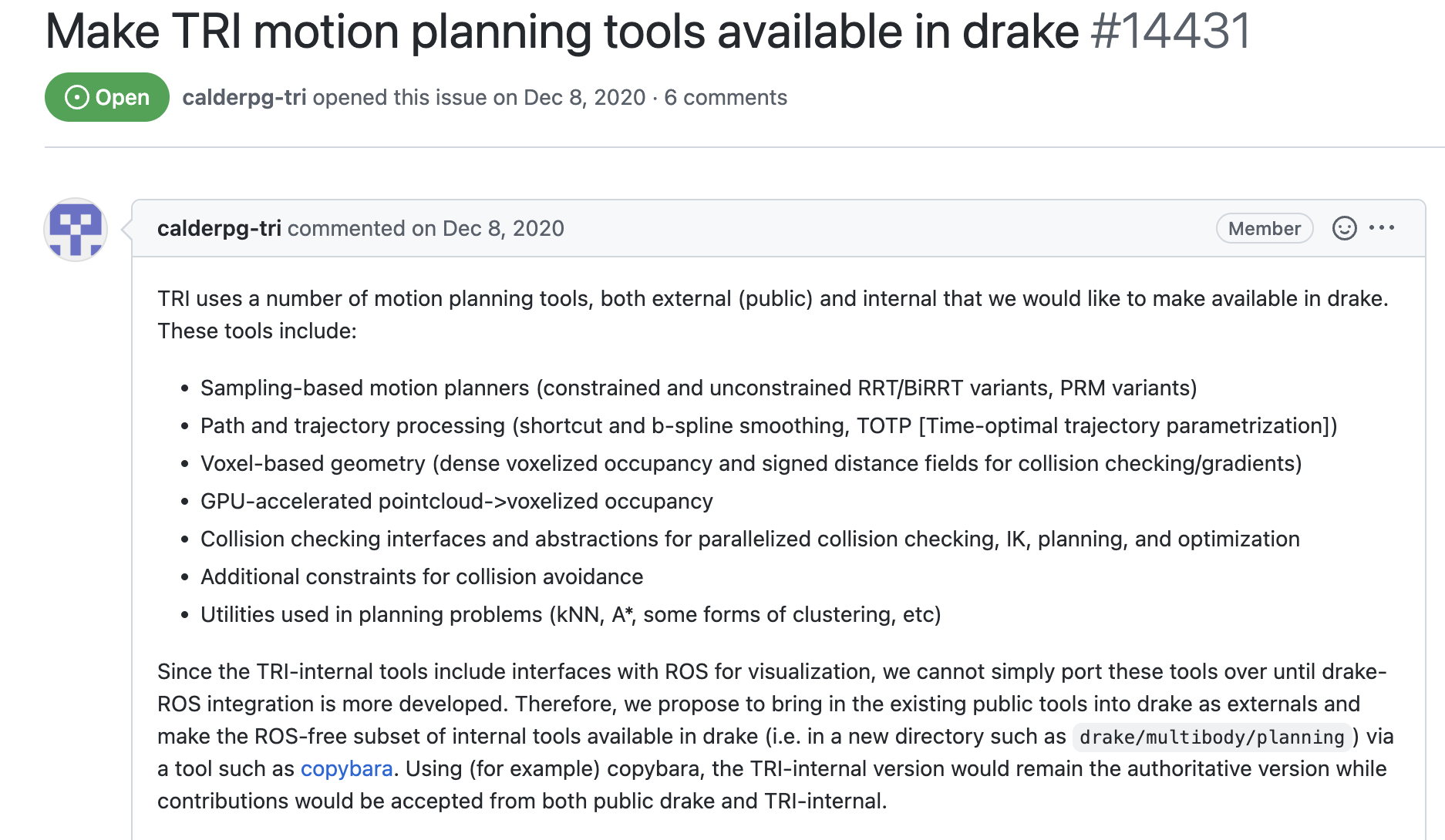
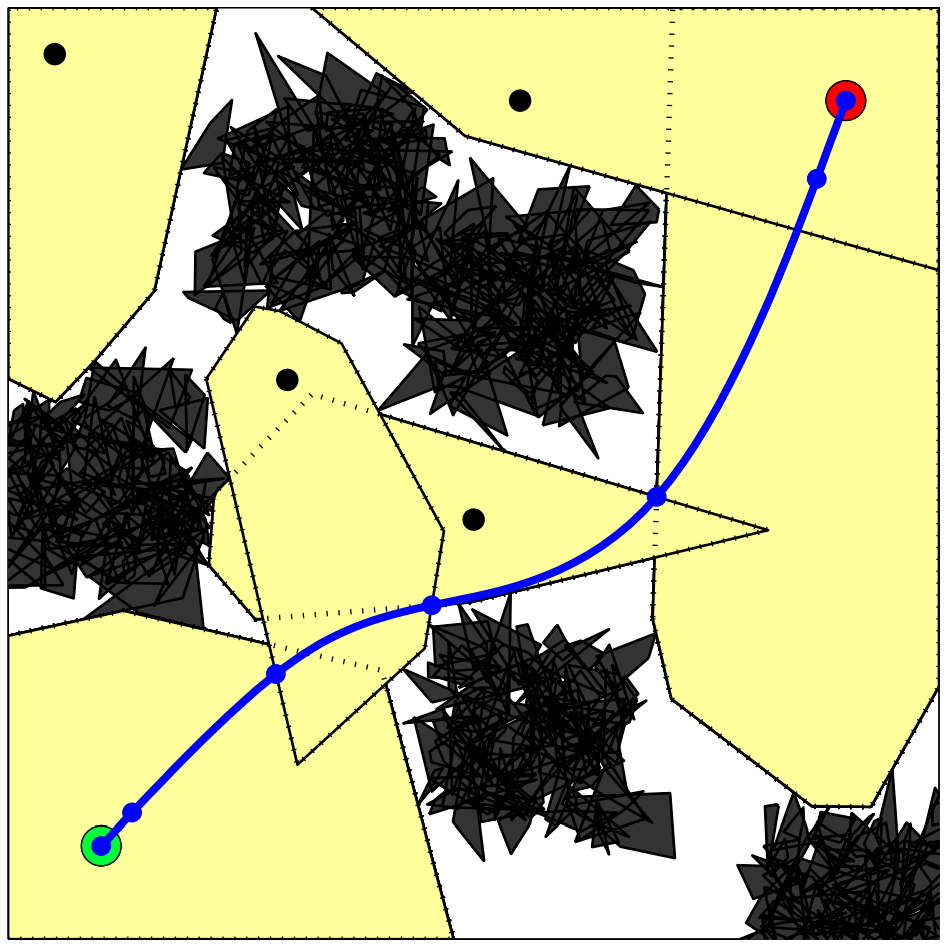
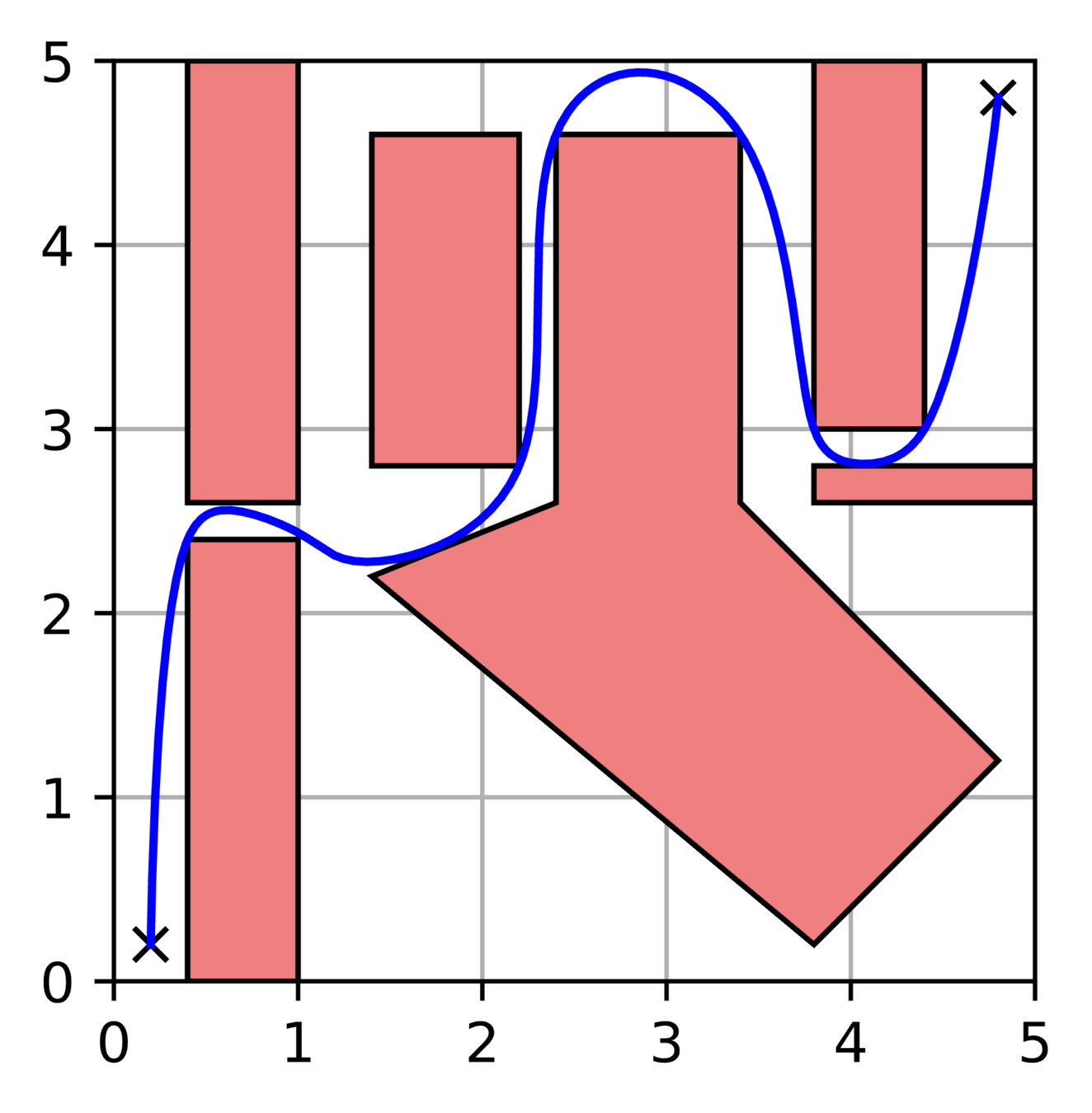
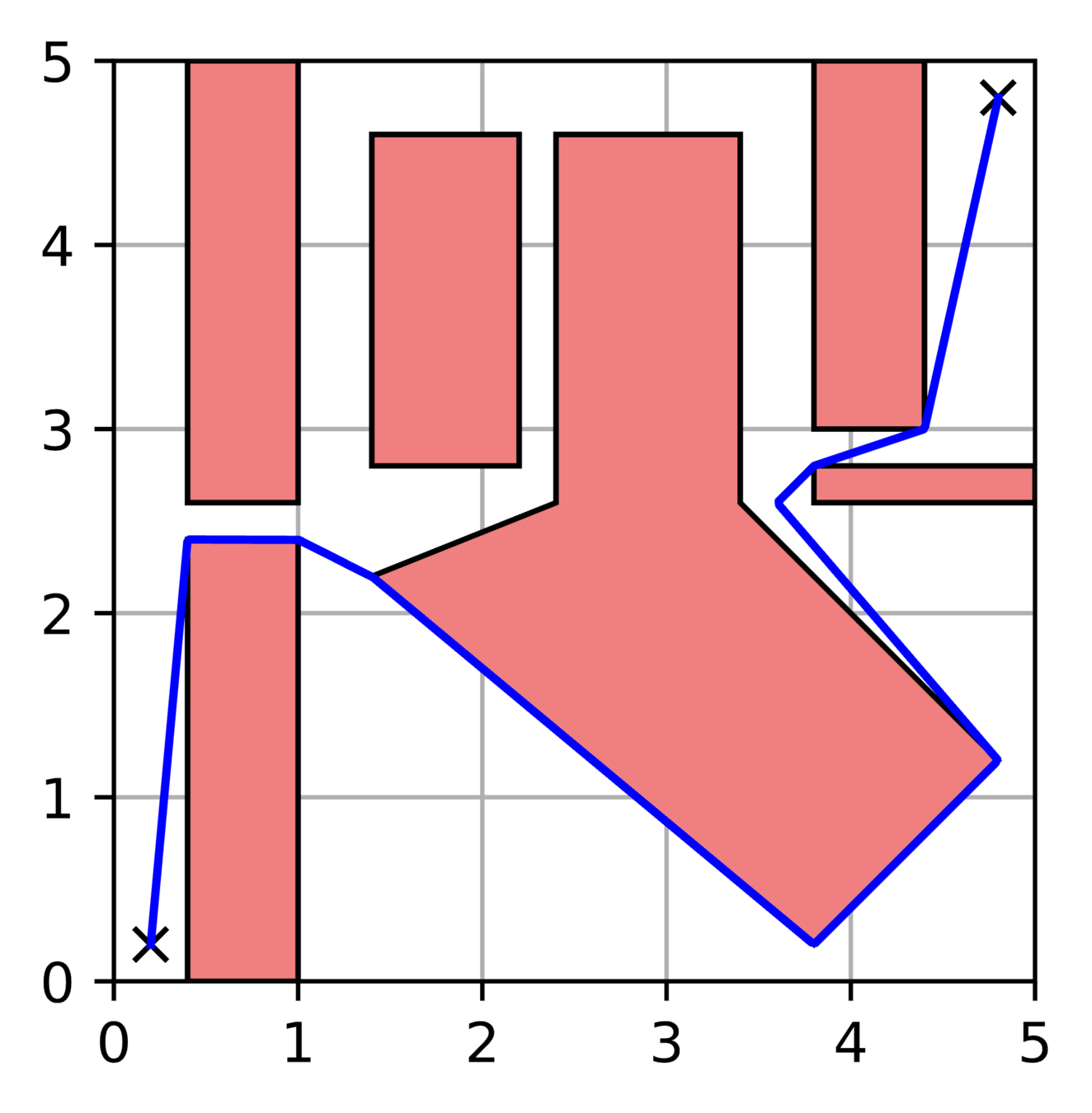
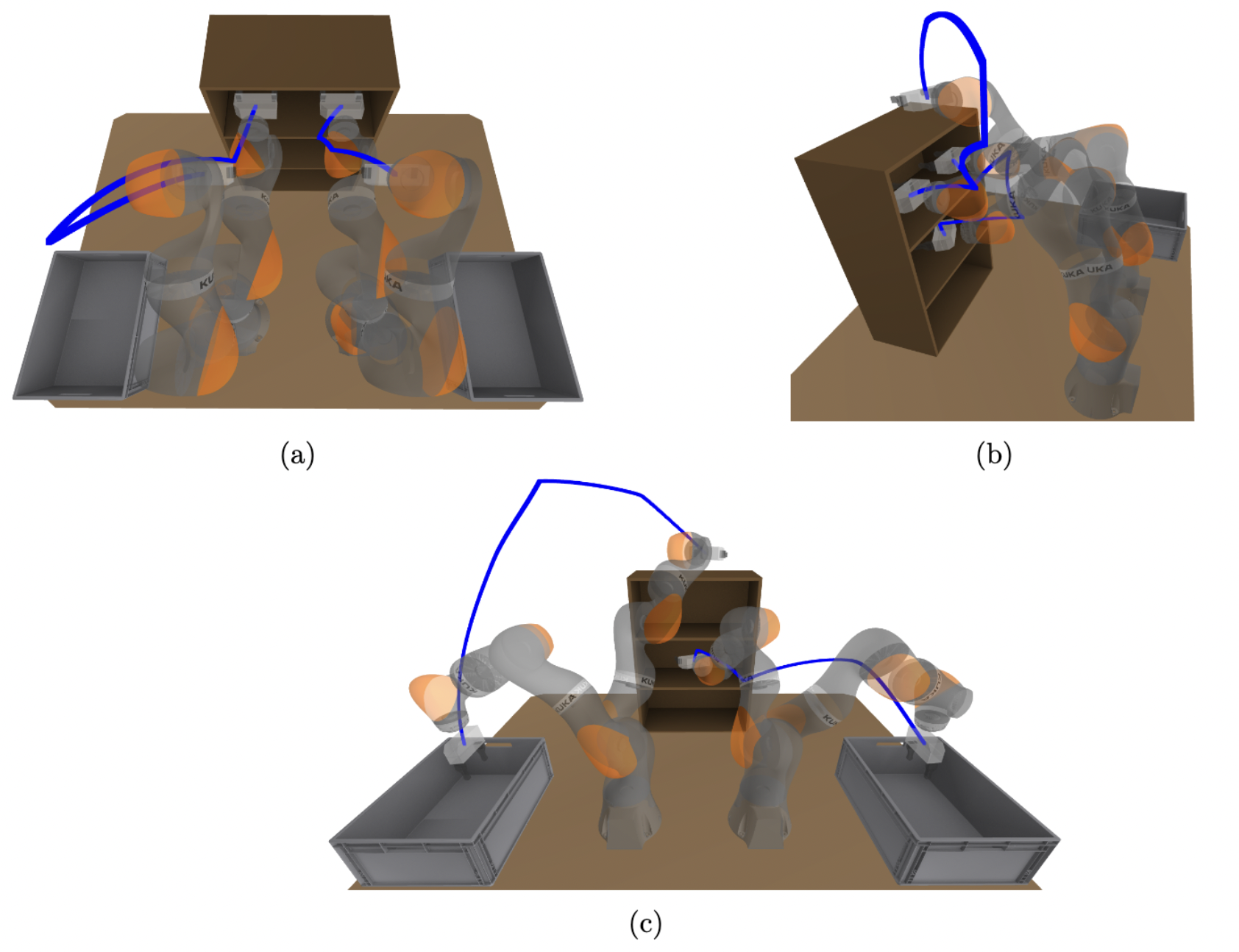
Motion Planning around Obstacles with Convex Optimization.
Tobia Marcucci, Mark Petersen, David von Wrangel, Russ Tedrake.
Available at: https://arxiv.org/abs/2205.04422
Accepted for publication in Science Robotics
Claims:
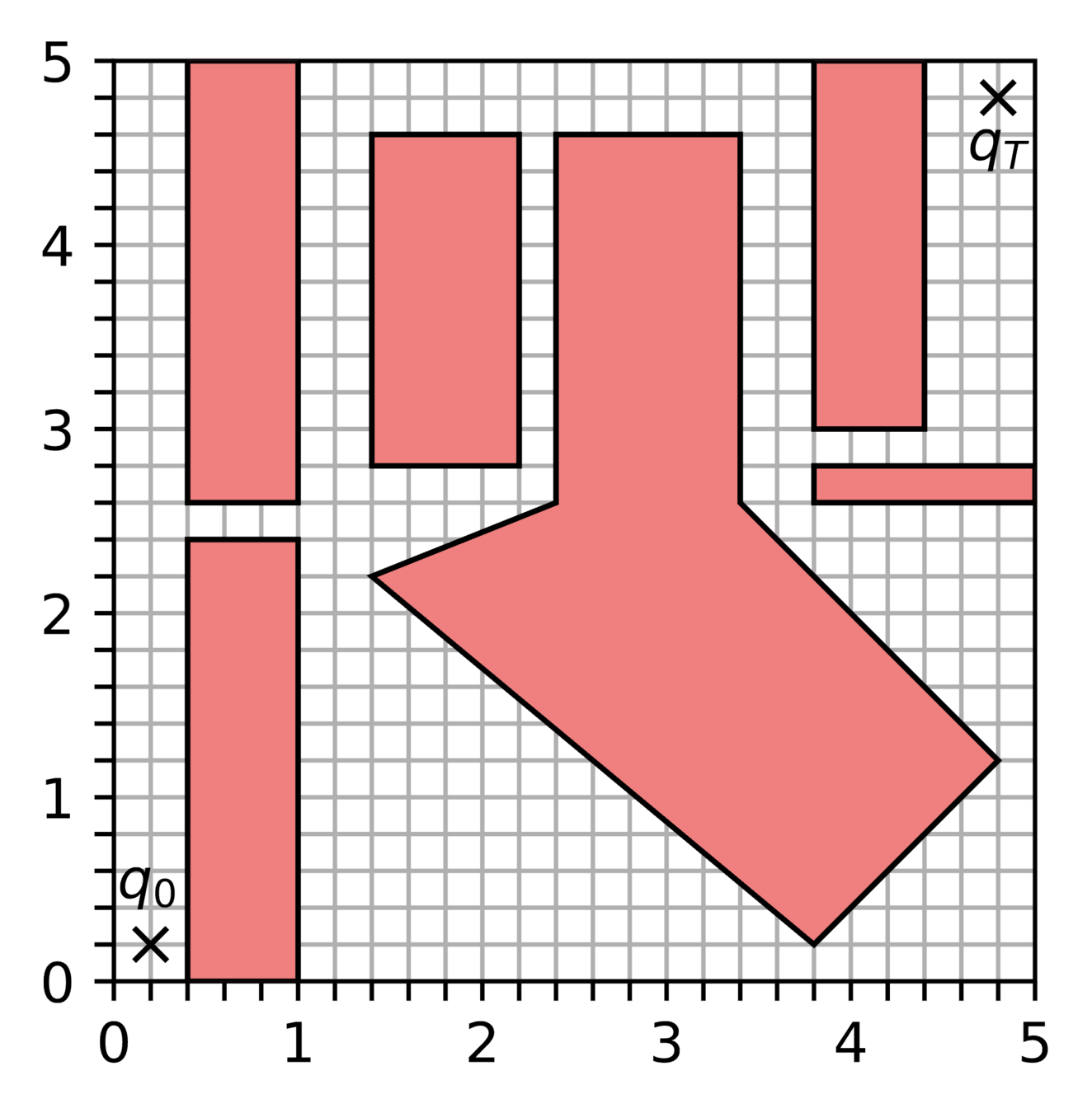
start
goal
The Probabilistic Roadmap (PRM)
from Choset, Howie M., et al. Principles of robot motion: theory, algorithms, and implementation. MIT press, 2005.
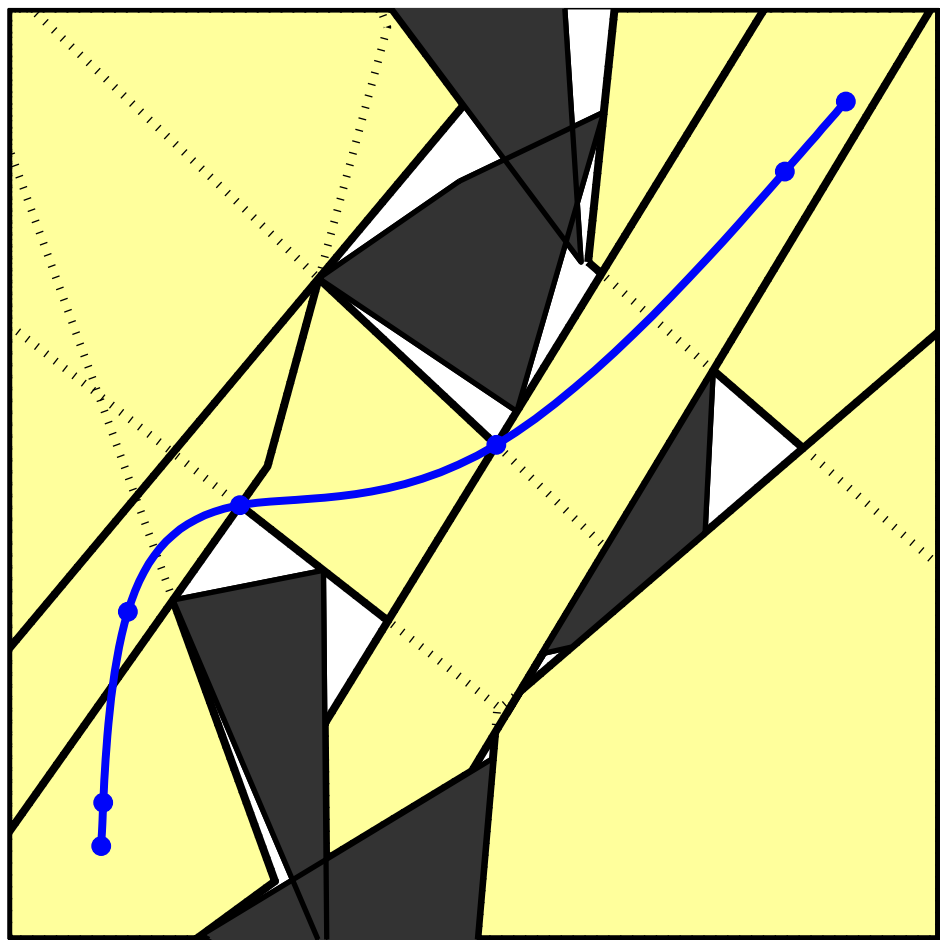
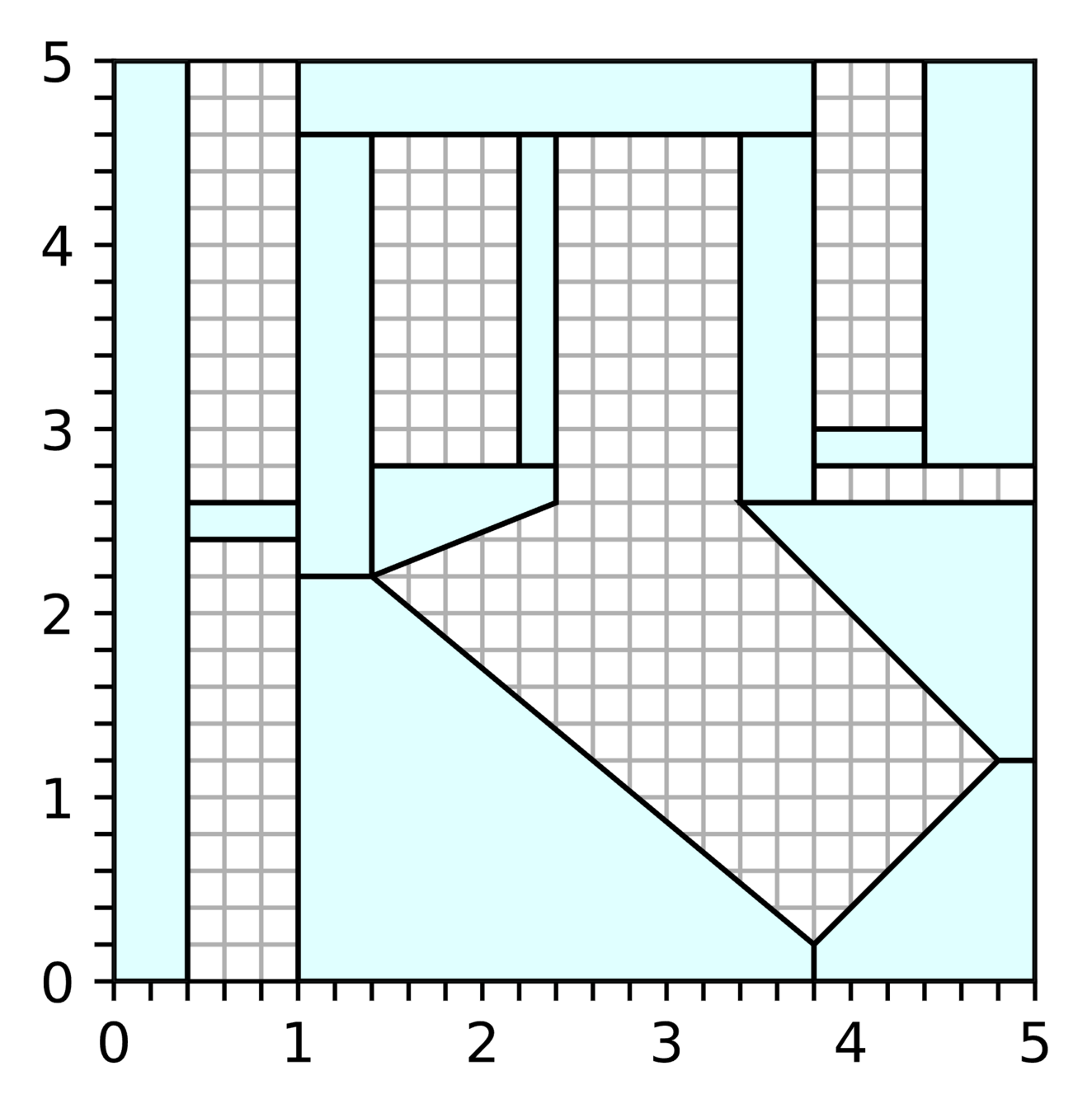
Note: The blue regions are not obstacles.
Mixed-integer formulation with a very tight convex relaxation
Main idea: Multiply constraints + Perspective function machinery
+ time-rescaling
Transitioning from basic research to real use cases
duration
path length
path "energy"
note: not just at samples
continuous derivatives
collision avoidance
velocity constraints
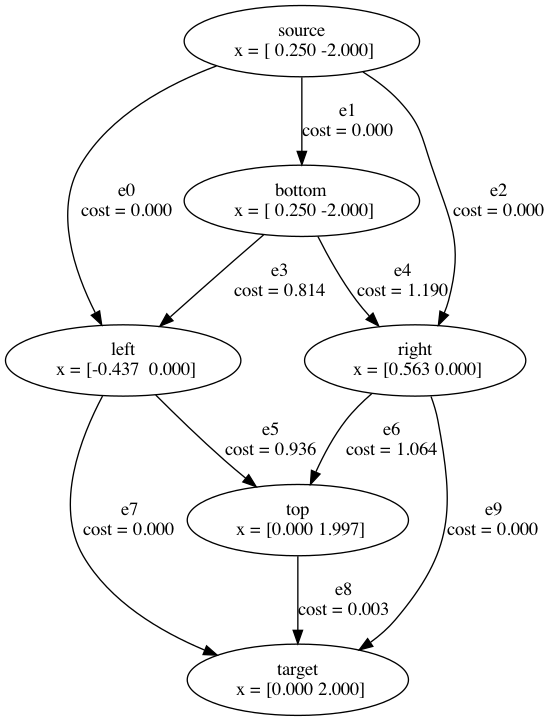
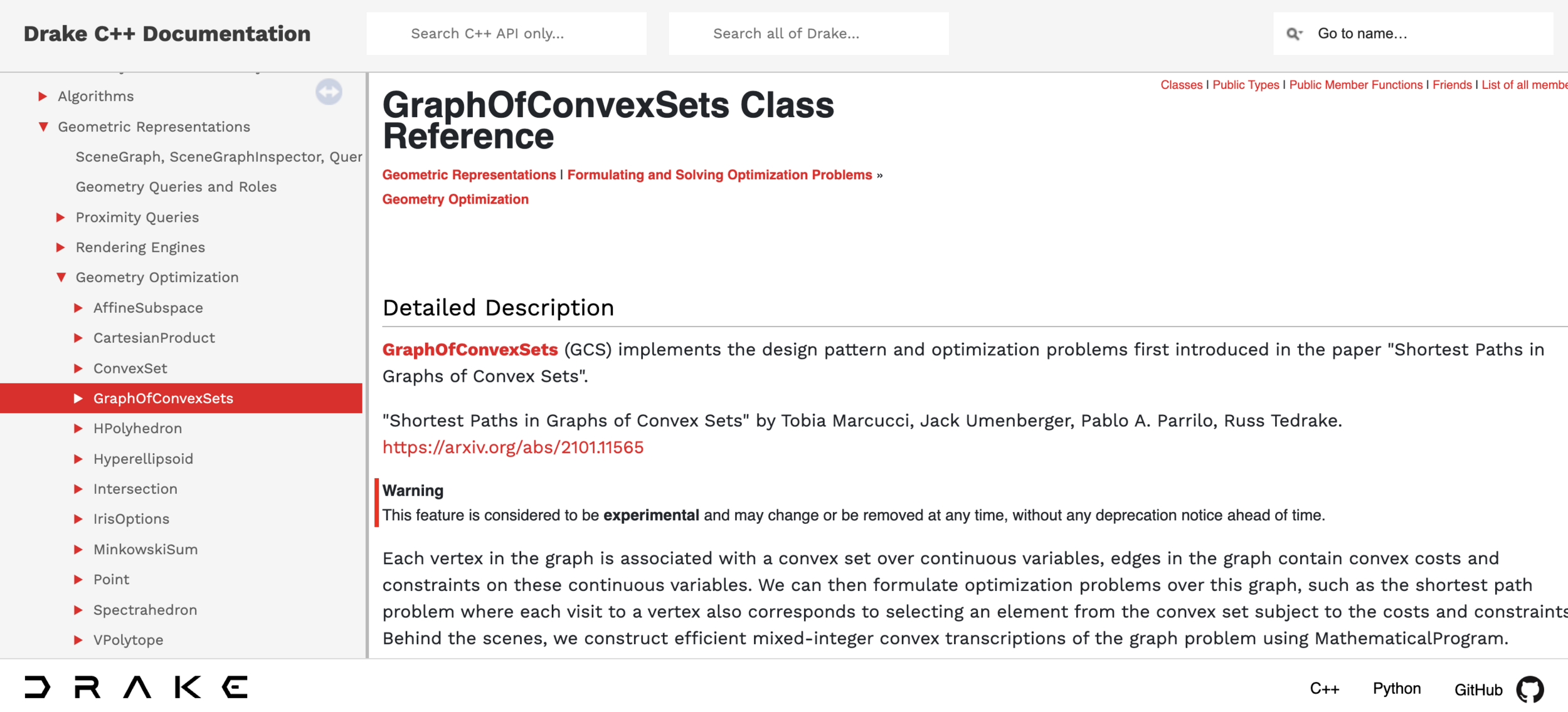
Graph of Convex Sets (GCS)
PRM
PRM w/ short-cutting
Preprocessor now makes easy optimizations fast!
Default playback at .25x
by Tobia Marcucci in collaboration w/ Stephen Boyd
PRM
GCS
work w/ Mark Petersen
Having said all that...
I don't actually love "collision-free motion planning" as a formulation...
By russtedrake
MIT Robotic Manipulation Fall 2023 http://manipulation.csail.mit.edu



