










russtedrake PRO
Roboticist at MIT and TRI
MIT 6.832: Underactuated Robotics
Spring 2022, Lecture 1
Follow live at https://slides.com/d/jW5DEh4/live
(or later at https://slides.com/russtedrake/spring22-lec01)
Alexandre Amice
Lujie Yang
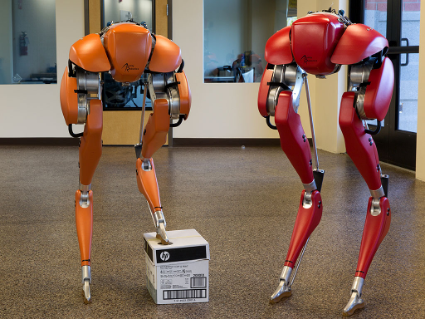
Cassie by Agility Robotics
T-HR3 by Toyota
ANYmal C by ANYbotics
Spot by Boston Dynamics
Troody by Pete Dilworth (MIT Leg Lab)
3D Passive-Dynamic Walker by Steve Collins and Andy Ruina (used w/ permission)
"Tour of the MIT Leg Lab"
(used w/ permission from Marc Raibert)
http://world.honda.com/ASIMO/video/
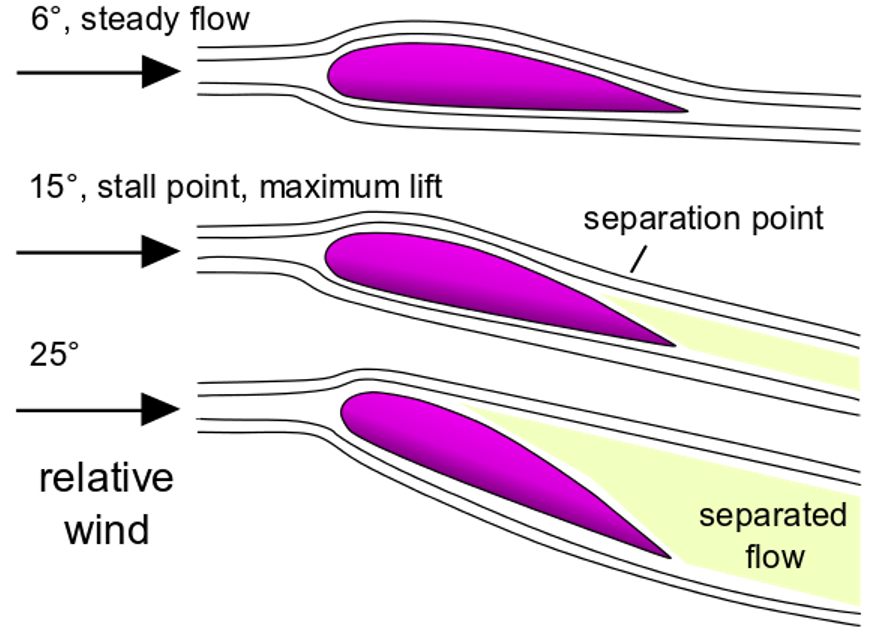
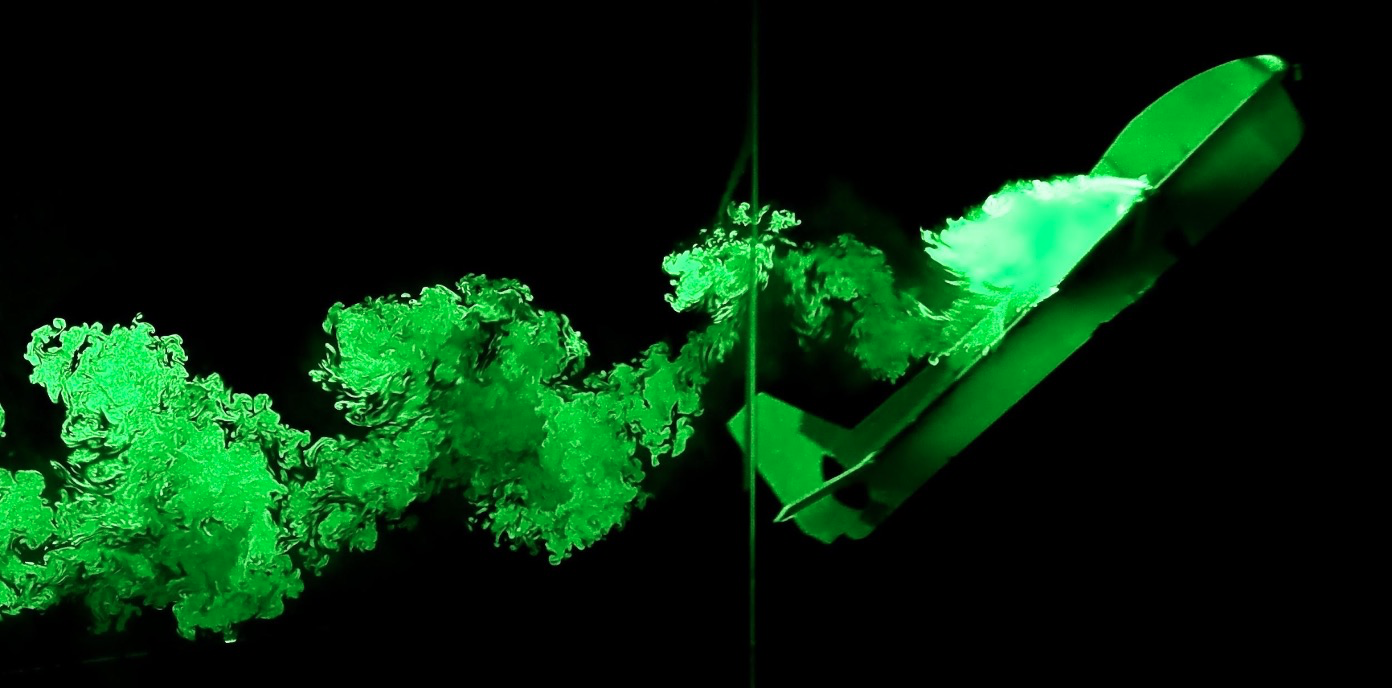
https://en.wikipedia.org/wiki/Stall_(fluid_dynamics)
http://mendobrew.com
http://www.davewalshphoto.com
J Exp Biol October 2012 vol. 215 no. 20 3603-3611
from George Lauder and Mike Triantafyllou (Liao et al, 2003)
By russtedrake
MIT Underactuated Robotics Spring 2021 http://underactuated.csail.mit.edu


