Making Look-Ahead Active Learning Strategies Feasible with Neural Tangent Kernels
Mohamad Amin Mohamadi
The University of British Columbia
NeurIPS 2022

Active Learning
Active learning: reducing the required amount of labelled data in training ML models through allowing the model to "actively request for annotation of specific datapoints".
We focus on Pool Based Active Learning:
AL Acquisition Functions
Most proposed acquisition functions in deep active learning can be categorized to two branches:
- Uncertainty Based: Maximum Entropy, BALD
- Representation-Based: BADGE, LL4AL
Our Motivation: Making Look-Ahead acquisition functions feasible in deep active learning:
Retraining
Engine
Contributions
-
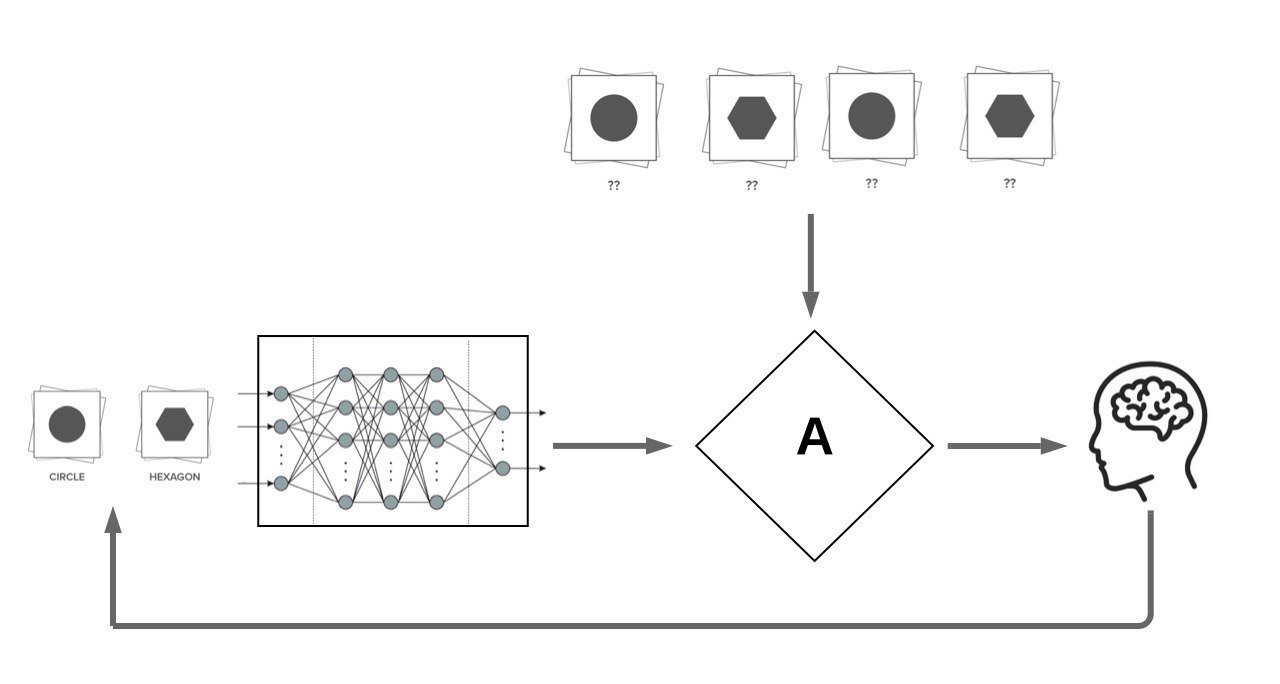
Problem: Retraining the neural network with every unlabelled datapoint in the pool using SGD is practically infeasible.
-
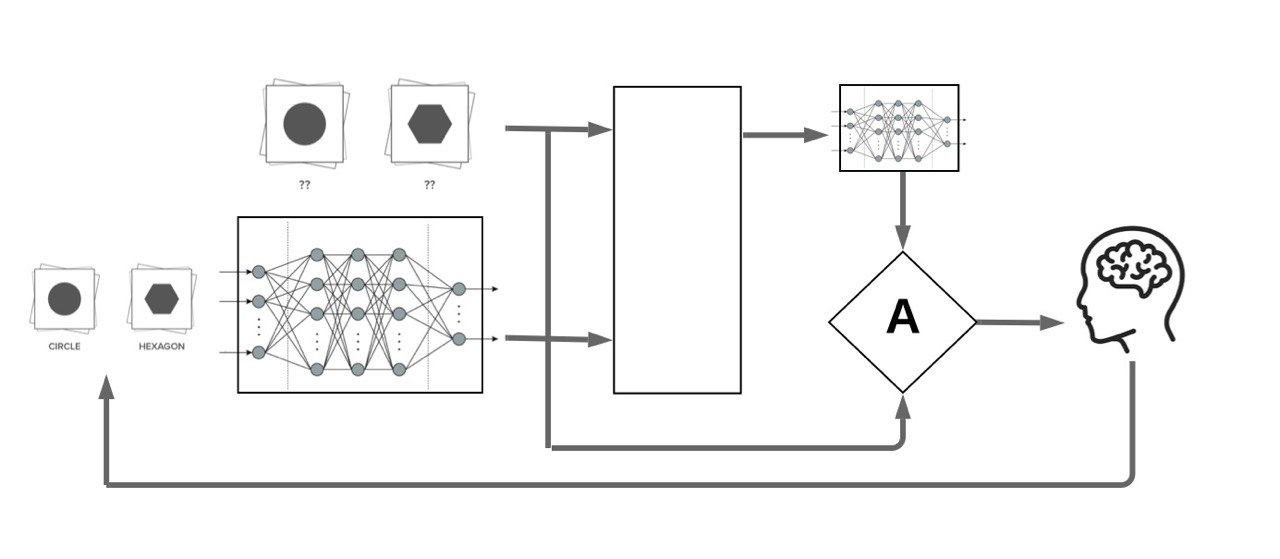
Solution: We propose to use a proxy model based on the first-order Taylor expansion of the trained model to approximate this retraining.
-
Contributions:
- We prove that this approximation is asymptotically exact for ultra wide networks.
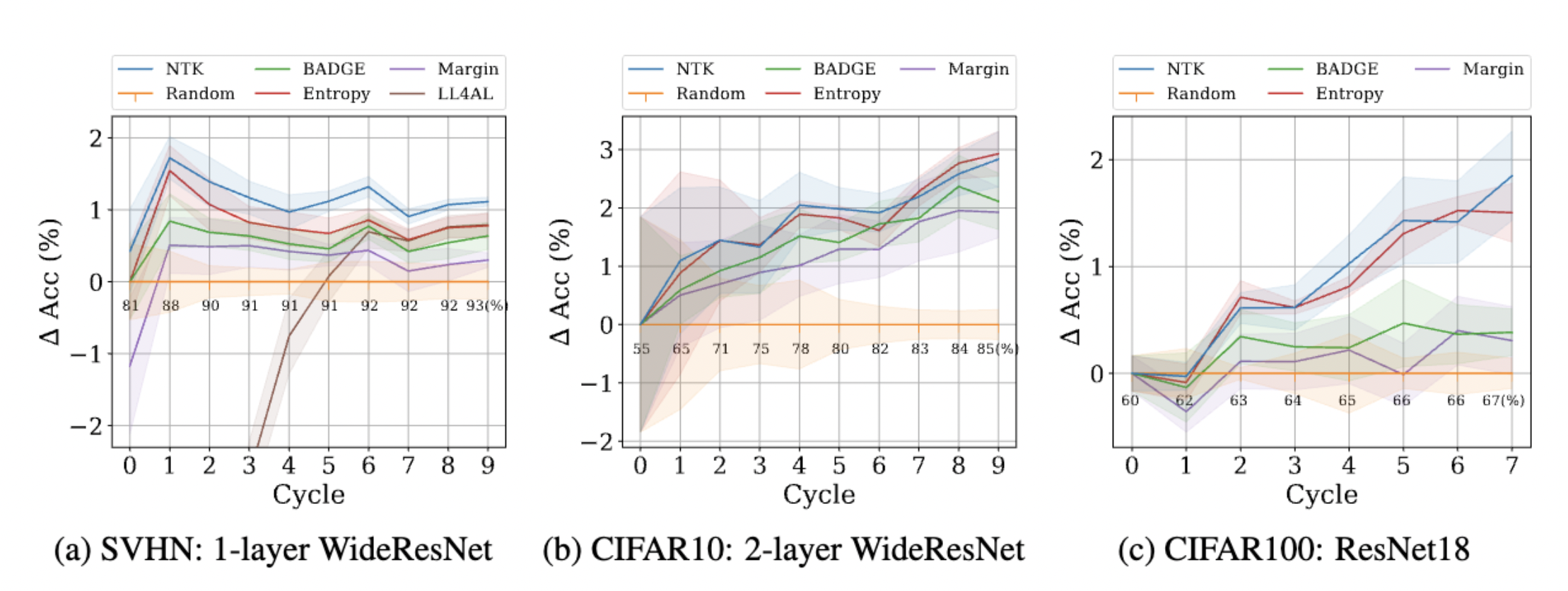
- Our method achieves similar or improved performance than best prior pool-based AL methods on several datasets.
-
Our proxy model can be used to perform fast Sequential Active Learning (no SGD needed)!
Approximation of Retraining
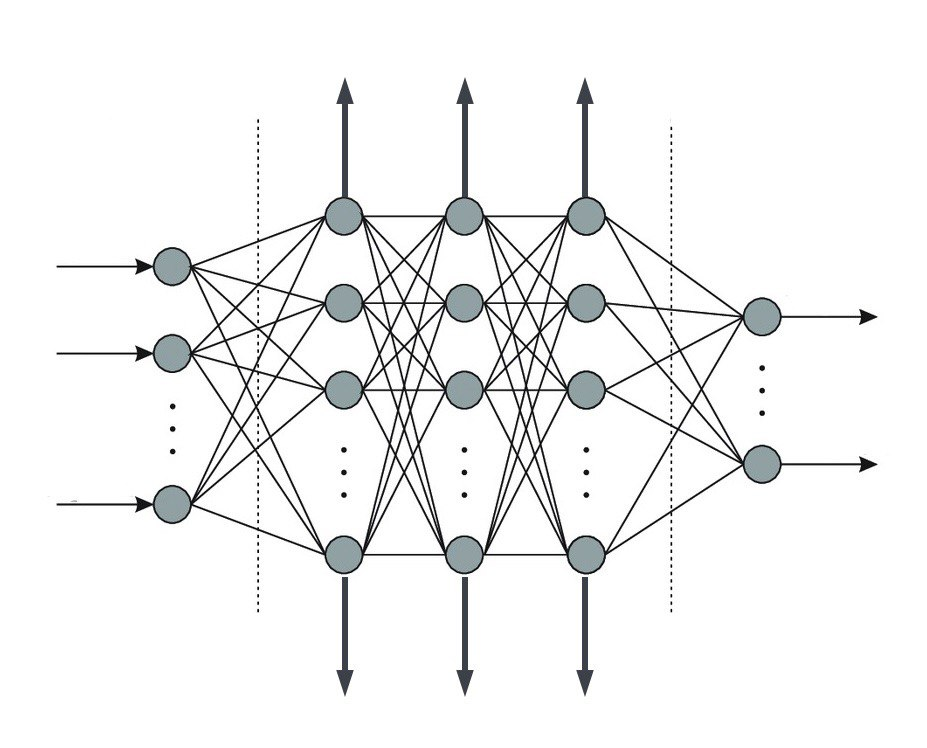
- Jacot et al.: training dynamics of suitably initialized infinitely wide neural networks can be captured by the Neural Tangent Kernels (NTKs).
- Lee et al.: the first-order Taylor expansion of a neural network around its initialization has training dynamics converging to that of the neural network as the width grows:
The Neural Tangent Kernel
- An important object in characterizing the training of suitably-initialized infinitely wide neural networks (NN)
- Describes the exact training dynamics of first-order Taylor expansion of any finite neural network:
- Is defined as


Training Neural Networks
Basic elements in neural network training:
Gradient Descent:
Training Neural Networks
Idea: Study neural networks in the function space!
Gradient Flow:
Change in the function output:
Hmm, looks like we have a kernel on the right hand side!
Training Neural Networks
So:
where
this is called the Neural Tangent Kernel!
- Idea: approximate the retrained neural network on a new datapoint ( ) using the first-order taylor expansion of the network around the current model.
- We prove that this approximation is asymptotically exact for ultra wide networks and is empirically comparable to SGD for finite width networks.
Approximation of Retraining
- Idea: approximate the retrained neural network on a new datapoint ( ) using the first-order taylor expansion of the network around the current model .
- We prove that this approximation is asymptotically exact for ultra wide networks and is empirically comparable to SGD for finite width networks.
Approximation of Retraining
Look-Ahead Active Learning
- We employ the proposed retraining approximation in a well-suited acquisition function which we call the Most Likely Model Output Change (MLMOC):
-
Although our experiments in the pool-based AL setup were all done using MLMOC, the proposed retraining approximation is general.
- We hope that this enables new directions in deep active learning using the look-ahead criteria.
Experiments
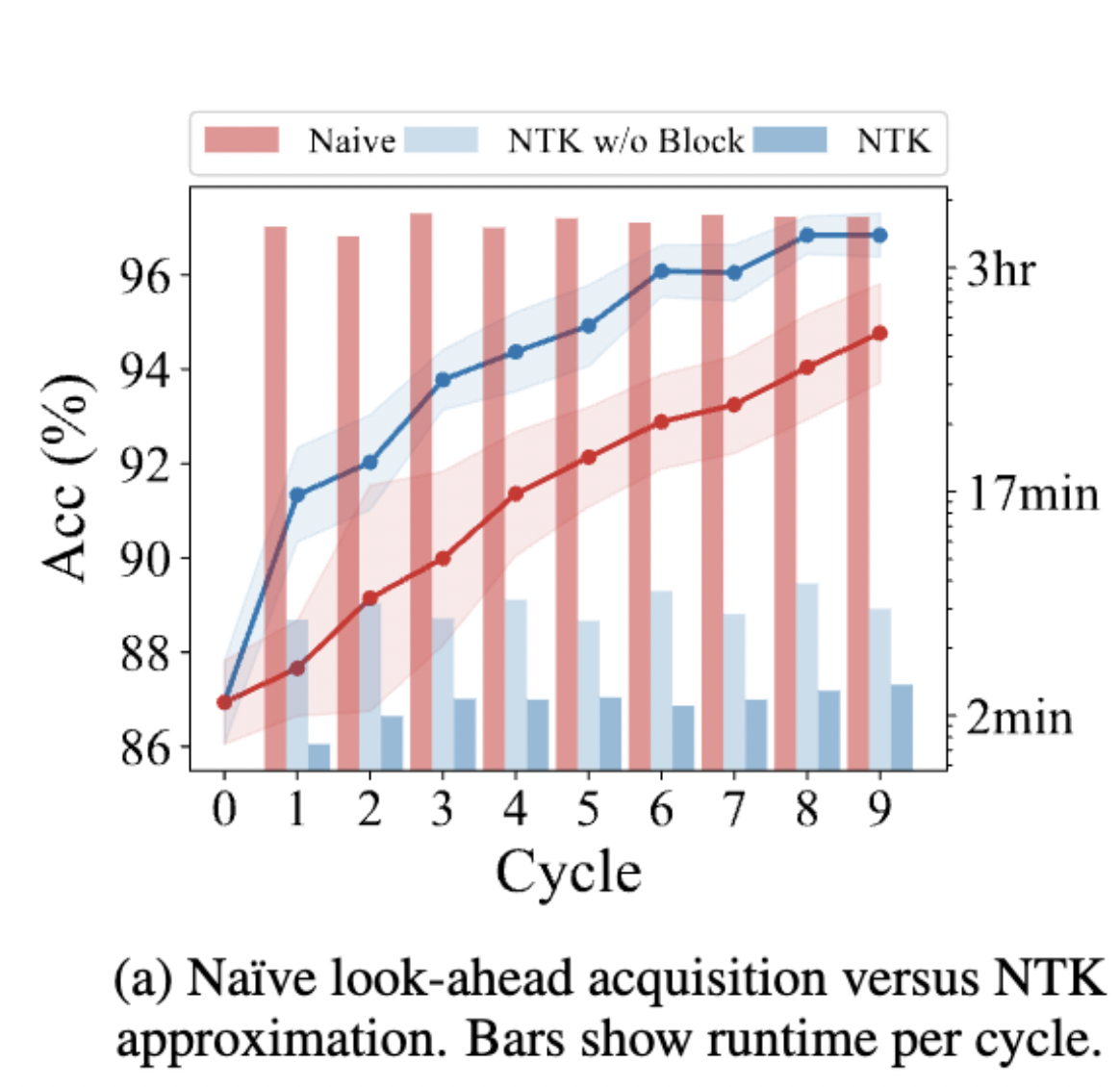
Retraining Time: The proposed retraining approximation is much faster than SGD.
Experiments: The proposed querying strategy attains similar or better performance than best prior pool-based AL methods on several datasets.
Thanks!
arXiv URL
GitHub URL