Large Language Models on Robots
Demonstrating


On the Journey for Shared Priors
with machine learning
Implicit Behavior Cloning
Learning Grasping from Data
RT-1: Robotics Transformer
On the Journey for Shared Priors
with machine learning
Interact with the physical world to learn bottom-up commonsense
i.e. "how the world works"
Implicit Behavior Cloning
Learning Grasping from Data
RT-1: Robotics Transformer
Machine Learning is a Box
Interpolation
Extrapolation
adapted from Tomás Lozano-Pérez
Machine Learning is a Box
Interpolation
Extrapolation
Internet
Meanwhile in NLP...
Large Language Models
adapted from Tomás Lozano-Pérez
Internet
Meanwhile in NLP...
Books
Recipes
Code
News
Articles
Dialogue
Large Language Models?
Robot Planning
Visual Commonsense
Robot Programming
Socratic Models, Inner Monologue
Code as Policies
PaLM-SayCan

Somewhere in the space of interpolation
Lives
Demo: Robot Planning with PaLM-SayCan
Michael Ahn, Anthony Brohan, Noah Brown, Yevgen Chebotar, Omar Cortes, Byron David, Chelsea Finn, Chuyuan Fu, Keerthana Gopalakrishnan, Karol Hausman, Alex Herzog, Daniel Ho, Jasmine Hsu, Julian Ibarz, Brian Ichter, Alex Irpan, Eric Jang, Rosario Jauregui Ruano, Kyle Jeffrey, Sally Jesmonth, Nikhil J Joshi, Ryan Julian, Dmitry Kalashnikov, Yuheng Kuang, Kuang-Huei Lee, Sergey Levine, Yao Lu, Linda Luu, Carolina Parada, Peter Pastor, Jornell Quiambao, Kanishka Rao, Jarek Rettinghouse, Diego Reyes, Pierre Sermanet, Nicolas Sievers, Clayton Tan, Alexander Toshev, Vincent Vanhoucke, Fei Xia, Ted Xiao, Peng Xu, Sichun Xu, Mengyuan Yan, Andy Zeng
https://say-can.github.io
Do As I Can, Not As I Say: Grounding Language in Robotic Affordances
Presented at the Conference on Robot Learning (CoRL) 2022
Language models can plan and ground them using affordances
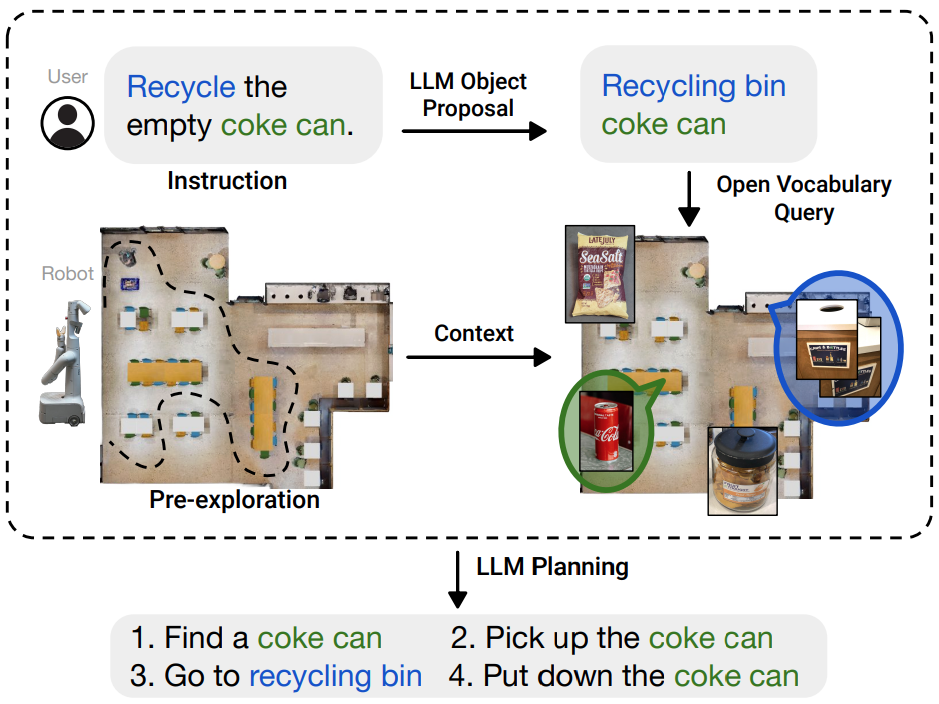
SayCan + NLMap or VLMap:
Demo: Robot Programming with Code as Policies
Language models can write robot code

Jacky Liang, Wenlong Huang, Fei Xia, Peng Xu, Karol Hausman, Brian Ichter, Pete Florence, Andy Zeng
code-as-policies.github.io
Code as Policies: Language Model Programs for Embodied Control


Presented at the IEEE International Conference on Robotics and Automation (ICRA) 2023
Video chat with a robot!
Overall Trends
Task
PaLM-SayCan
+ more closed-loop feedback
+ more low-level reasoning
+ more in-context learning
Socratic Models
Inner Monologue
Code as Policies
Task
Task
Task
state
action
action
action
action
state
action
action
state
action
action
state
state
expressed in robot code
Limitations
- Language models may hallucinate:
- Can confidently produce incorrect outputs
- Don't know when they don't know
- Language can be a lossy representation
- Expensive to run in terms of cost and latency
- Limited reasoning over "embodied" context
Limitations
- Language models may hallucinate:
- Can confidently produce incorrect outputs
- Don't know when they don't know
- Language can be a lossy representation
- Expensive to run in terms of cost and latency
- Limited reasoning over "embodied" context
Understanding the limits of language models today may give rise to future work
Come visit our demo!
Thank you!