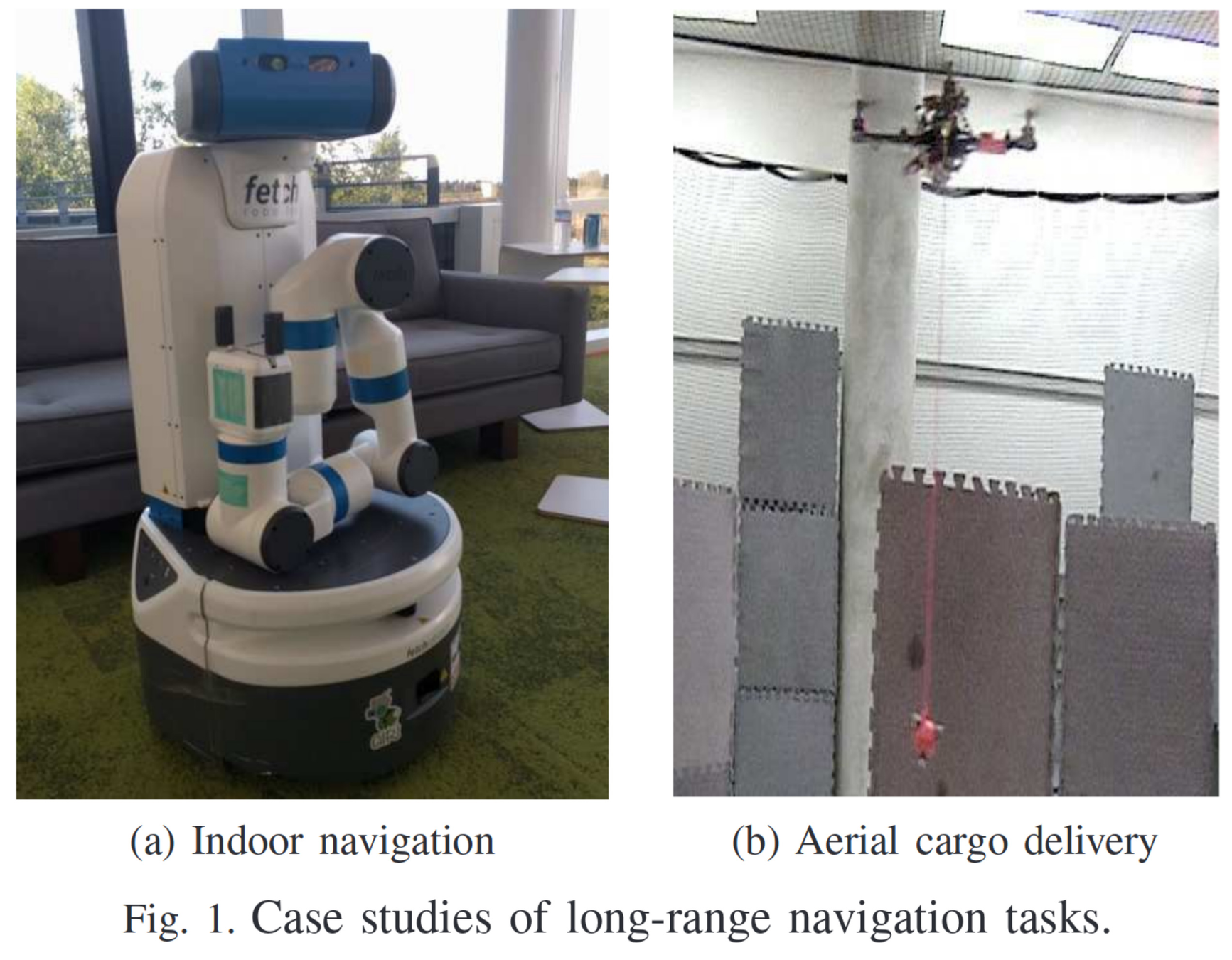
PRM-RL: Long-range Robotic Navigation Tasks by Combining Reinforcement Learning and Sampling-based Planning
Aleksandra Faust, Oscar Ramirez, Marek Fiser, Kenneth Oslund, Anthony Francis, James Davidson, and Lydia Tapia
Presented by Breandan Considine
Workspace
Configuration space
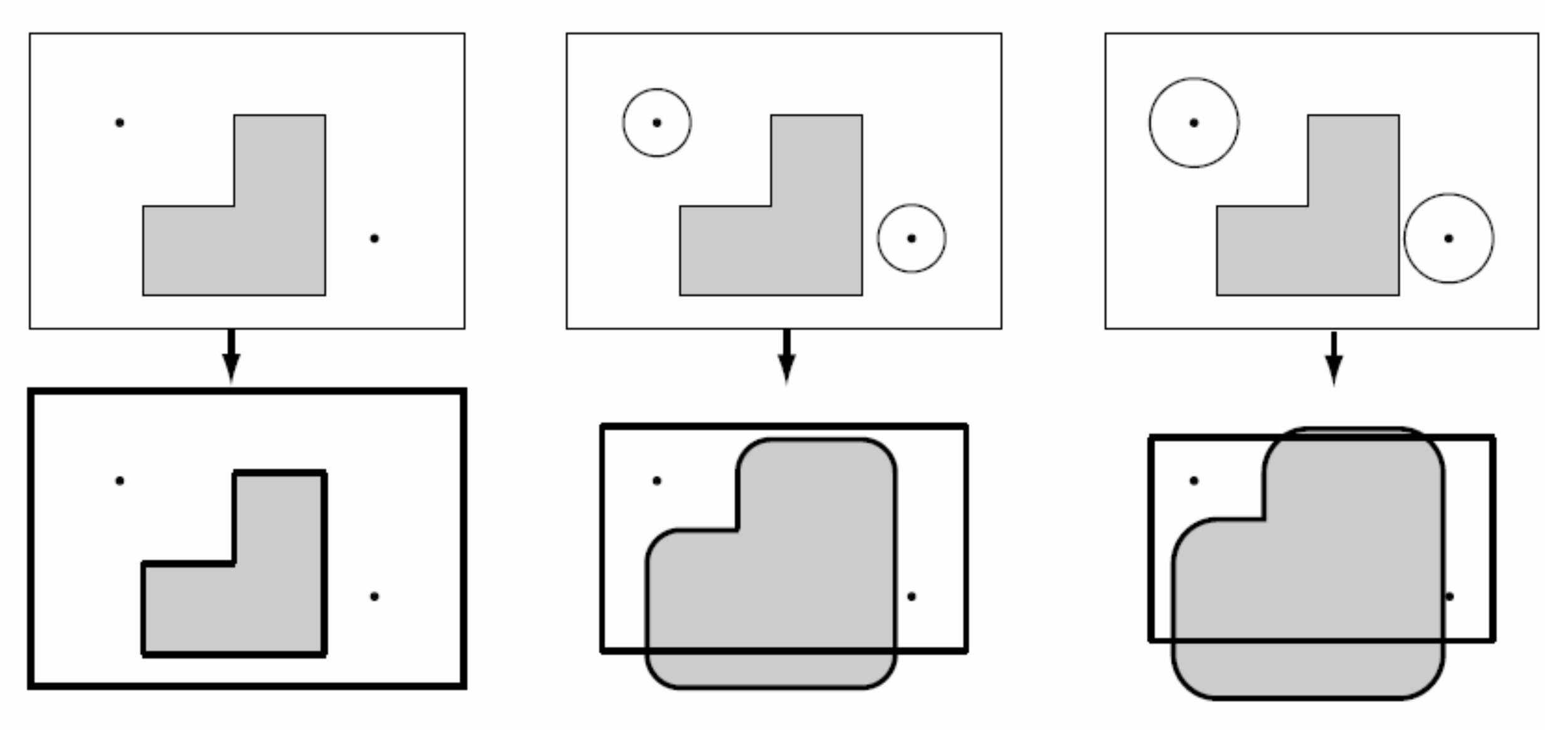
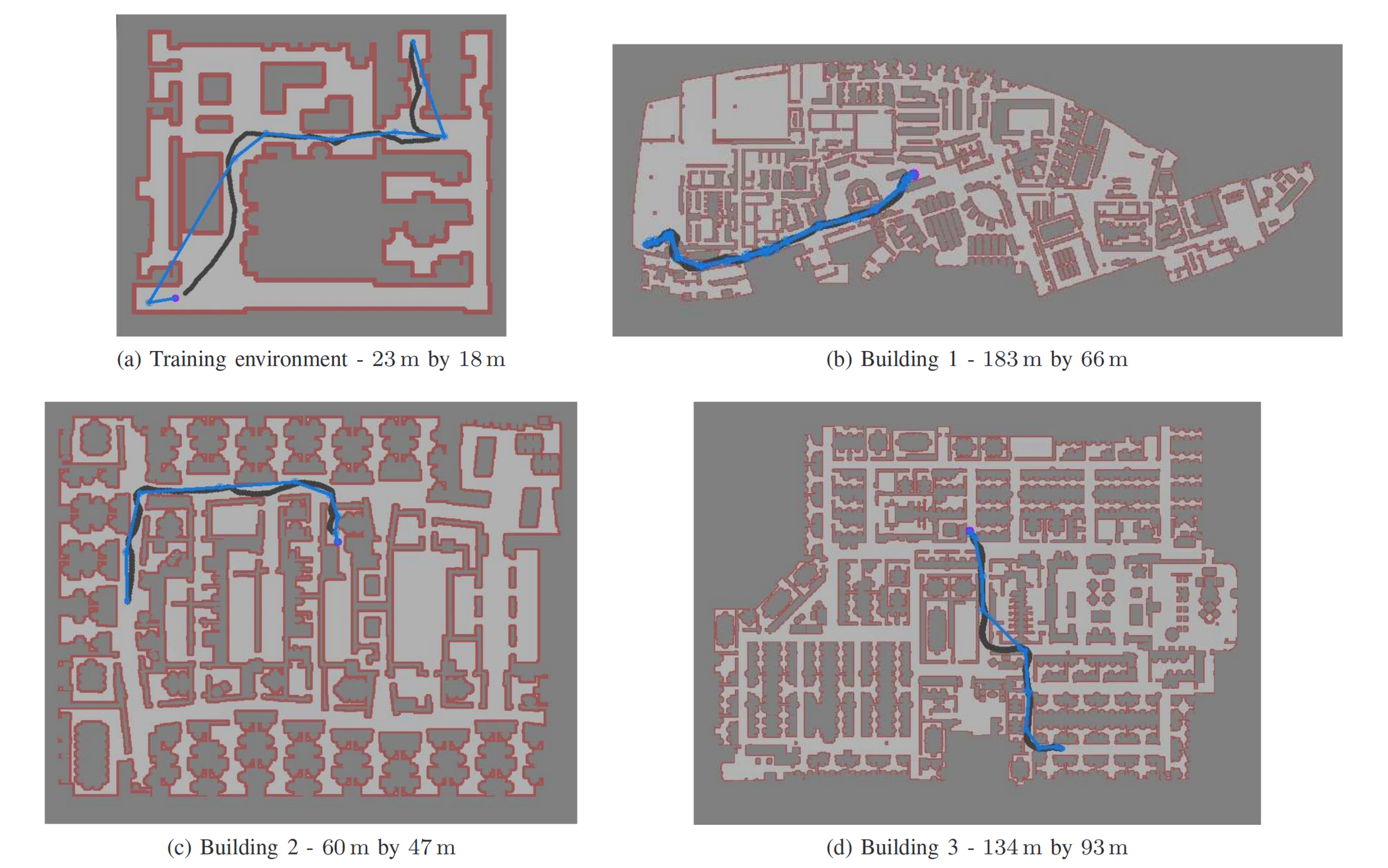

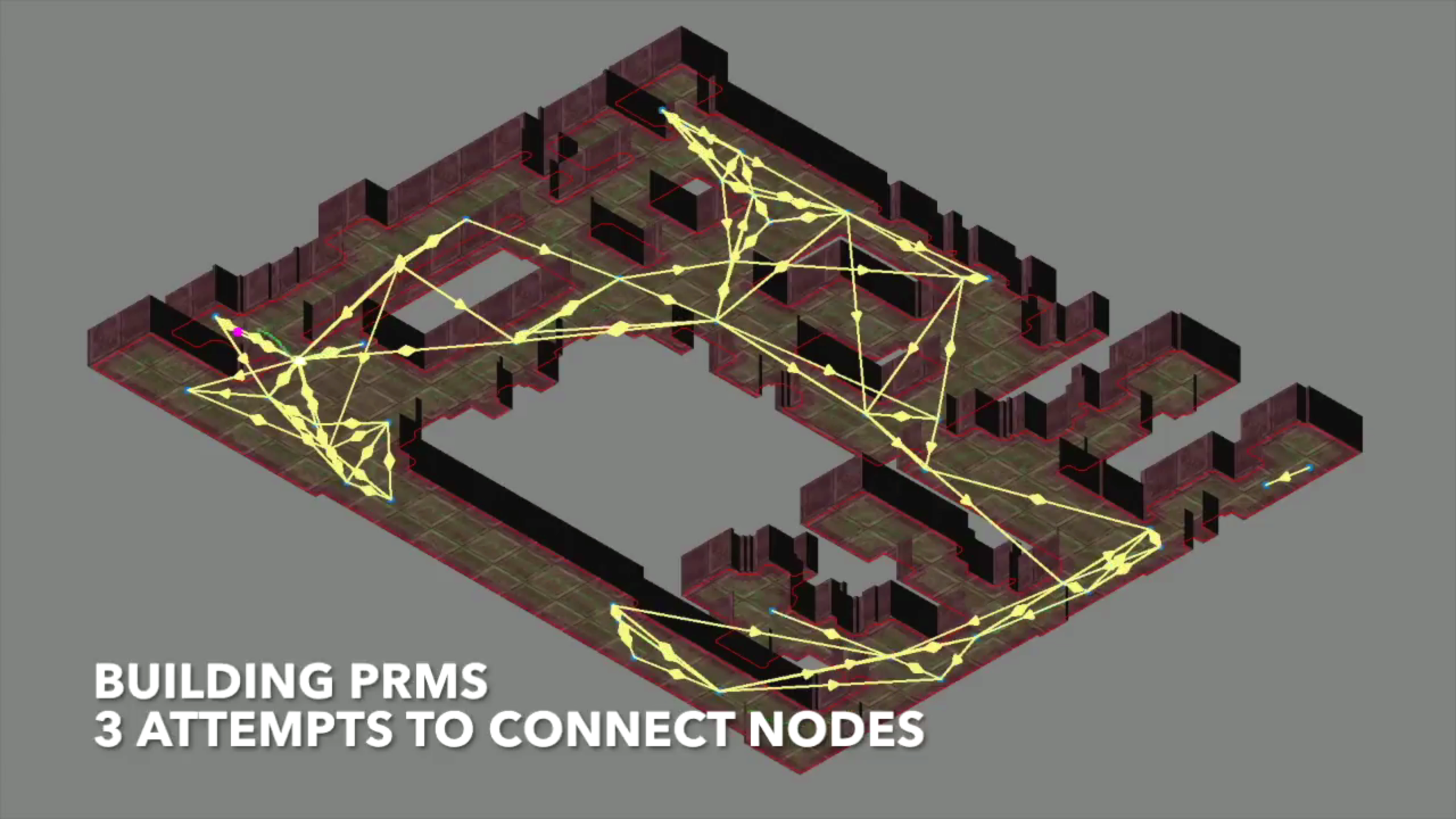
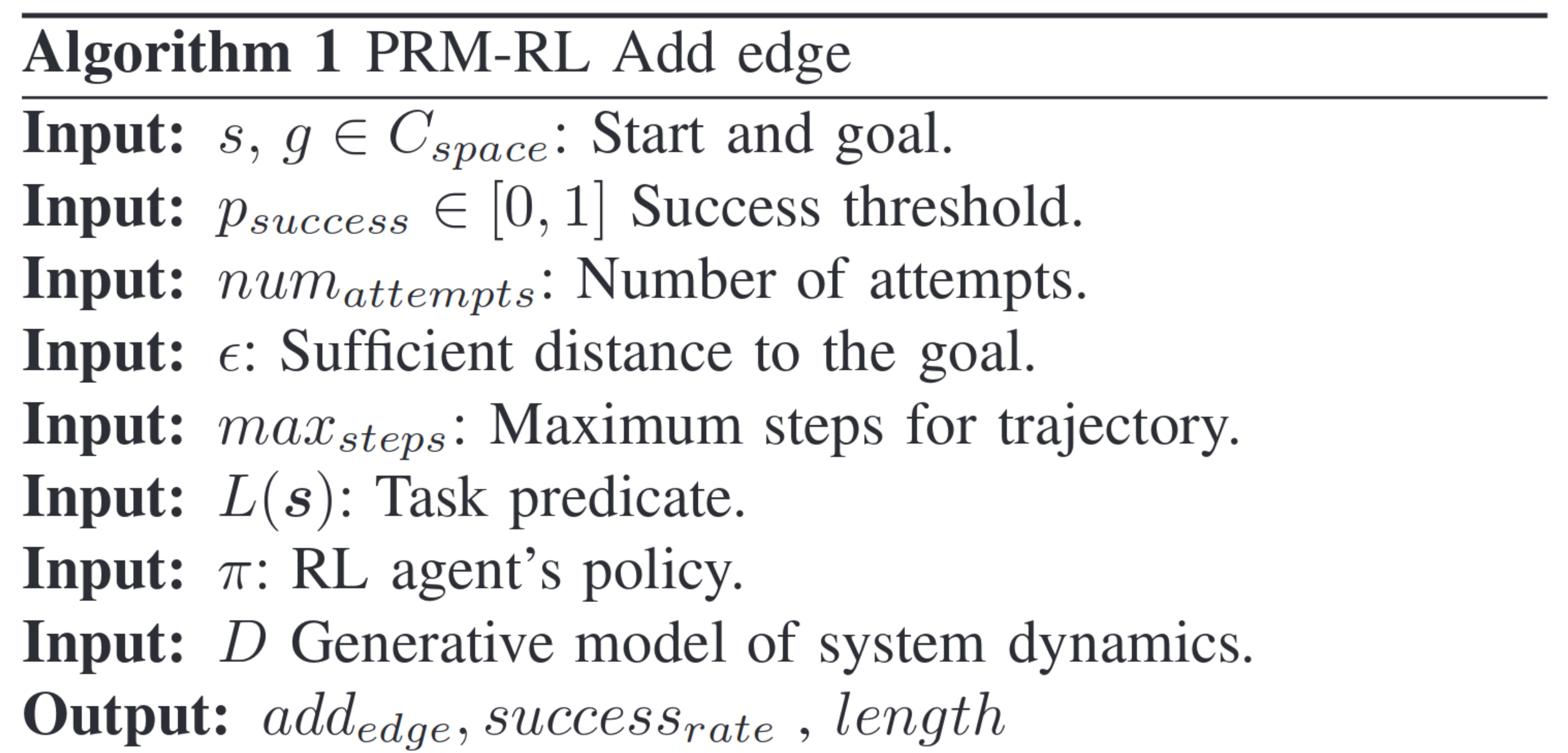
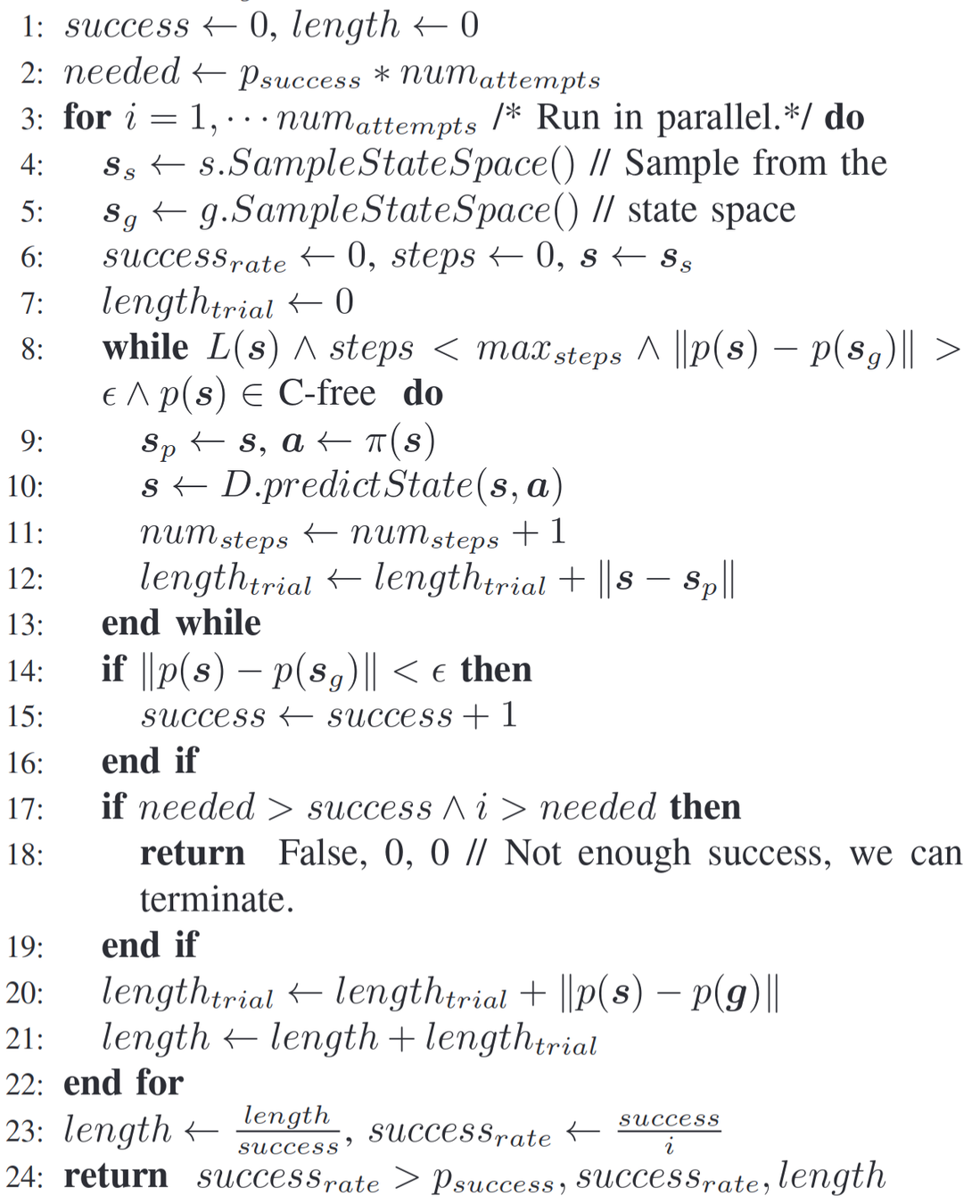
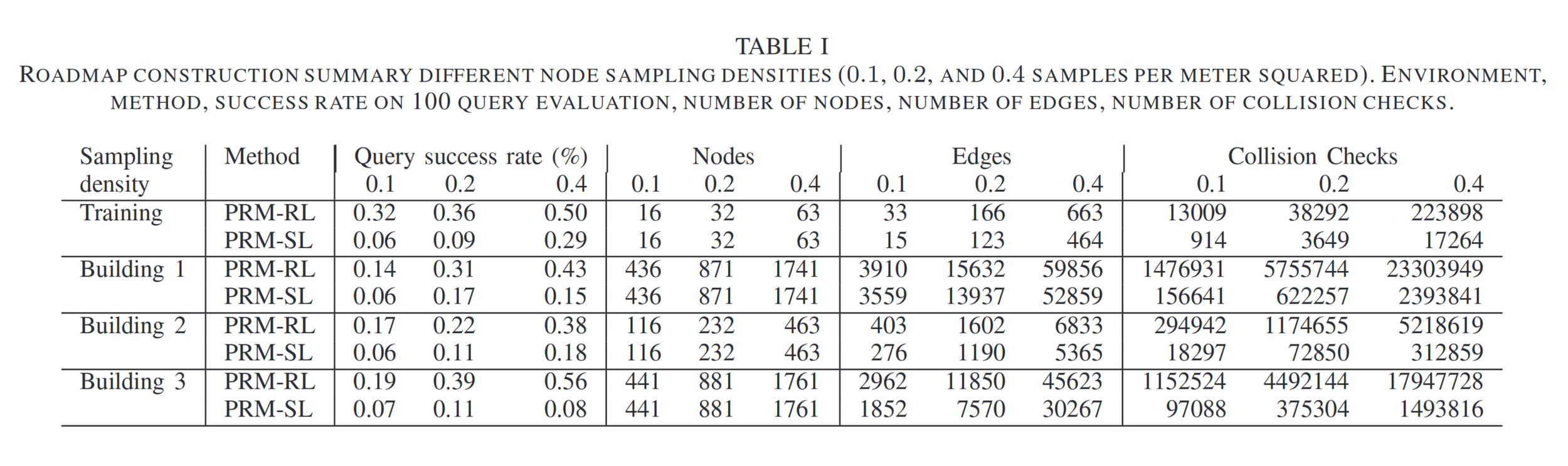
Probabilistic roadmaps
Advantages
- Very efficient planning representation
- Provably probabilistically complete
- Guaranteed to find a path if one exists, given enough samples
Disadvantages
- Executing reference trajectories
- Typically unaware of task constraints
- Can suffer from noise in perception and motor control
- Does not perform well under uncertainty
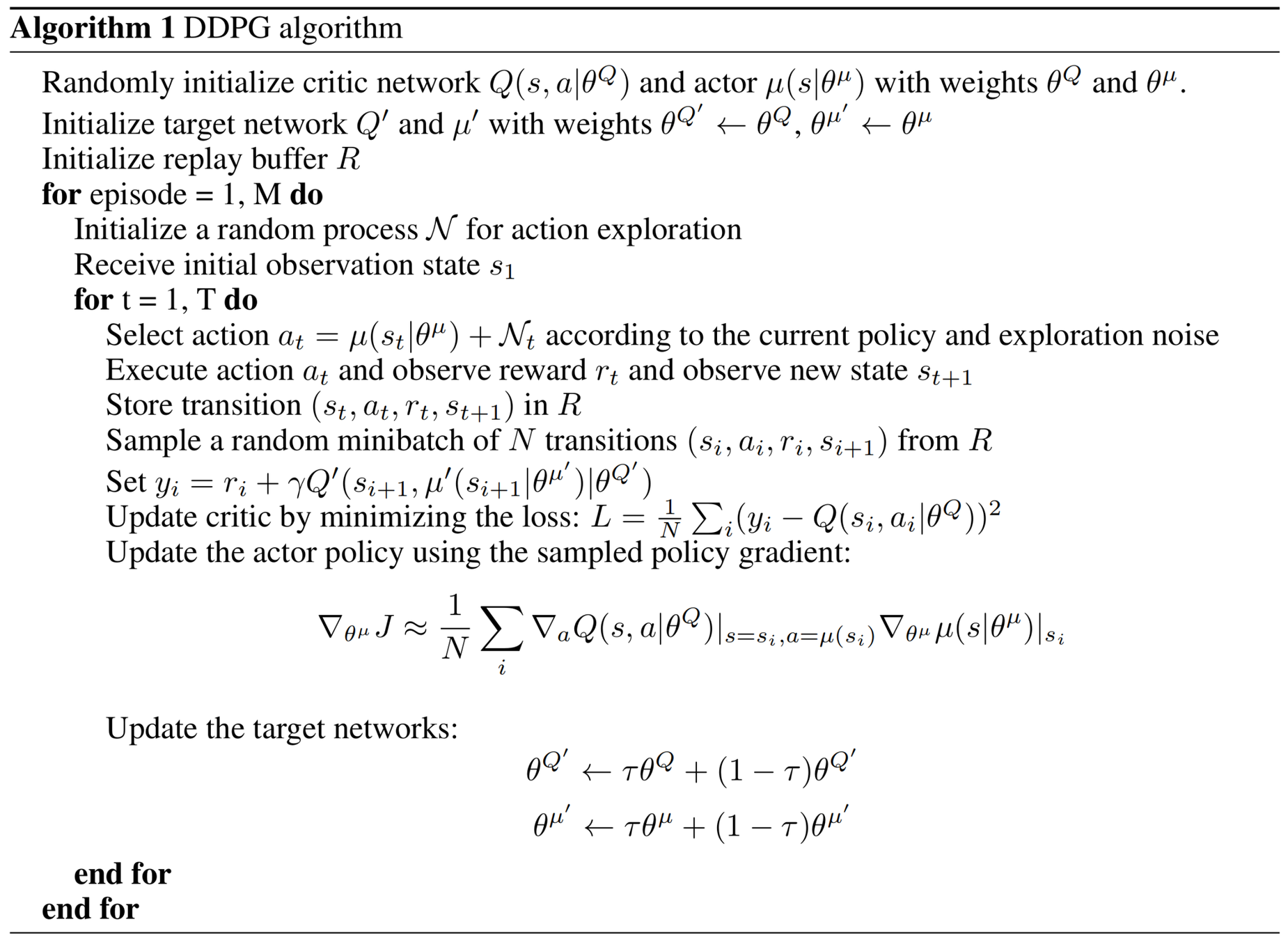
RL Planners
Advantages
- Robust to noise and errors
- Can obey robot dynamics and other task constraints
- Handles moderate changes to the environment
- Not as computationally complex to execute as other approaches (e.g. MPC, action filtering, hierarchical policy approximation)
Disadvantages
- Long range navigation on complex maps has a sparse reward structure
- Can be difficult to train
- Prone to converge on poor local minima
- Need to carefully select the control and action space
How can we synthesize these two approaches?
How do we train the dynamics model?