Robust Target Tracking Through
Path Planning
The Problem
- It takes a team of people to fly a drone while tracking bad guys
The Solution
- Give the drones an autopilot that will try to follow the important bad guys and free the humans to do other things


The Algorithm
- Plan a path that:
- Keeps the target in camera frame
- Reacquires the target if lost
- Maintains efficiency

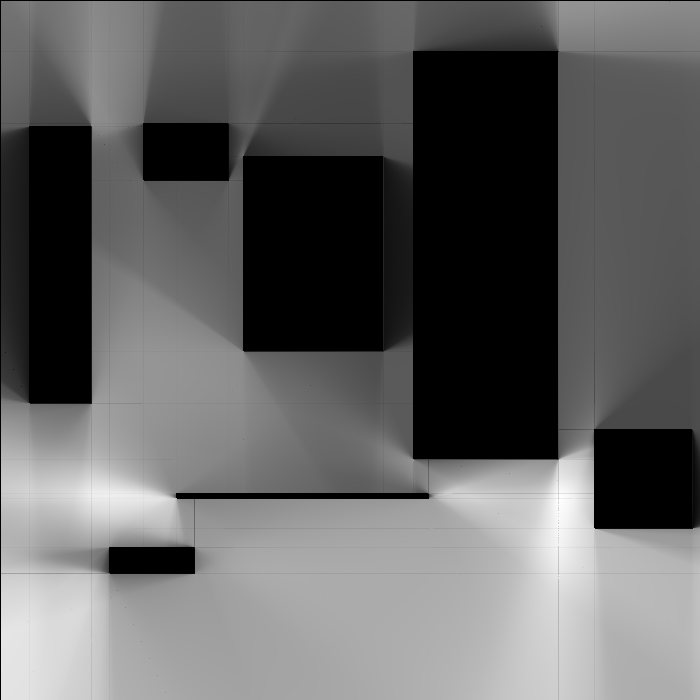
The Algorithm - Viewshed
- Generate a viewshed to get the viewable area from any given point
- Use that to influence the score
The Algorithm - RRT*
- Rapidly Exploring Random Tree
- The * indicates optimality