Graphics Programming Virtual Meetup

Discord

Tiny Renderer
Lesson 7
Shadow Mapping
Tutorial link:
https://github.com/ssloy/tinyrenderer/wiki/Lesson-7-Shadow-mapping
My Code:
https://github.com/cdgiessen/TinyRenderer
Shadow Mapping

A technique which gives a light 'occlusion'
This is so lights don't illuminate 'hidden' surfaces, eg surfaces that are behind others
The previous lighting calculations ignored that aspect
Implementation
Done in two passes
Start by generating a 'depth map' for the light source, aka shadow buffer
Use a depth only shader, one that computes depth values only from the point of view of the light
struct DepthShader : public IShader {
mat<3,3> varying_tri;
DepthShader() : varying_tri() {}
virtual vec4f vertex(int iface, int nthvert) {
// read the vertex from .obj file
vec4f gl_Vertex = embed<4>(model->vert(iface, nthvert));
// transform it to screen coordinates
gl_Vertex = Viewport*Projection*ModelView*gl_Vertex;
varying_tri.set_col(nthvert, proj<3>(gl_Vertex/gl_Vertex[3]));
return gl_Vertex;
}
virtual bool fragment vec3f bar, TGAColor &color) {
vec3f p = varying_tri*bar;
color = TGAColor(255, 255, 255)*(p.z/depth);
return false;
}
};Shader Code
TGAImage depth(width, height, TGAImage::RGB);
lookat(light_dir, center, up); // use light_dir, not eye
viewport(width/8, height/8, width*3/4, height*3/4);
projection(0); //no projection required
DepthShader depthshader;
vec4f screen_coords[3];
for (int i=0; i<model->nfaces(); i++) {
for (int j=0; j<3; j++) {
screen_coords[j] = depthshader.vertex(i, j);
}
triangle(screen_coords, depthshader, depth, shadowbuffer);
}
depth.write_tga_file("depth.tga");Executing that shader
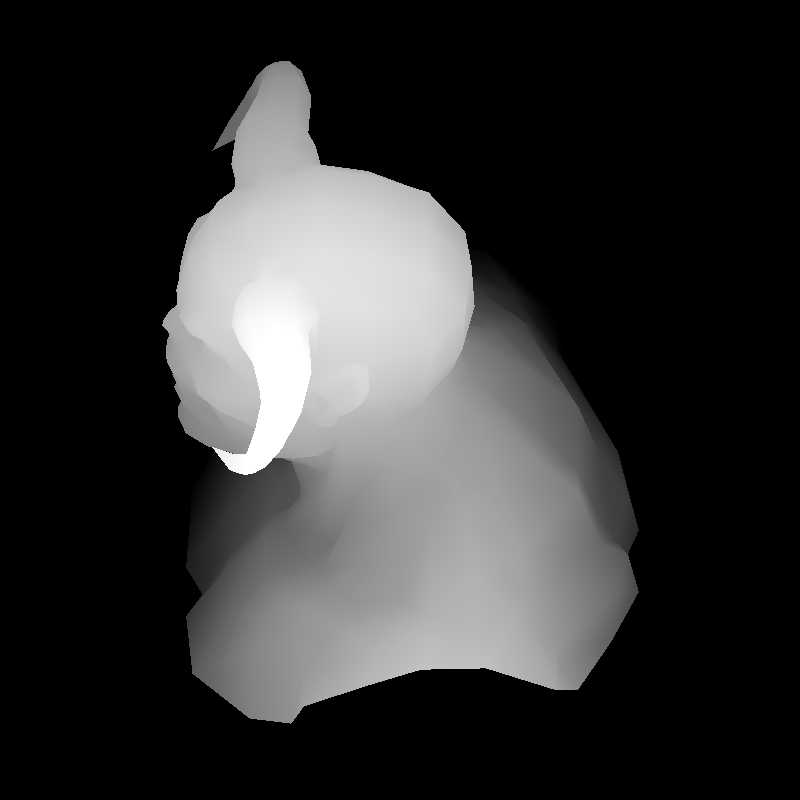
"Shadow buffer"
Now we 'know' how far the light goes into the scene
Using a single depth buffer works well for 'spot lights' but fails for point and directional only lights.
Point lights typically employ 6 separate depth buffers
They are combined into a 'cube' when sampled from
Directional lights, specifically 'global' ones like the sun, often use cascading shadow maps, where multiple depth buffers of difference scales are created to cover the whole scene.
With a shadow buffer in hand, we can begin the second pass, generating the main output
While we have the shadow buffer, its values are local to the source texture, which was created with a different coordinate space
Thus we need to translate the points from its space to our space
Matrix Multiplication to the rescue!
lightM = light_Viewport * light_Projection * light_ModelView;
cameraM = camera_Viewport * camera_Projection * camera_ModelView;
shadowM = lightM * cameraM.invert();
virtual bool fragment(vec3f bar, TGAColor &color) {
// corresponding point in the shadow buffer
vec4f sb_p = shadowM * embed<4>(varying_tri*bar);
sb_p = sb_p/sb_p[3];Translate from the light's basis to the camera's basis then sample
float shadow = 1.0 * (shadowbuffer.get(sb_p[0], sb_p[1])<sb_p[2]);
...
for (int i=0; i<3; i++)
color[i] =
std::min<float>(20 + c[i]*shadow*(1.2*diff + .6*spec), 255);We still don't know if a point is 'visible' to the light or not
Solution, its visible if the shadow buffer depth is less than depth in the scene
Here sb_p is the 'camera depth' at the current point but transformed into the basis of the shadow map, so we can compare them

Fill in the rest of the main shader from lesson 6, and voila!
A fix for the artifacts: fudge it till it looks good!
// magic coeff to avoid z-fighting
float shadow = .3+.7*(shadowbuffer[idx]<sb_p[2]+43.34);