Software Pipeline
FSD
Introduction
1
Alexander Isenko
24.04.2017
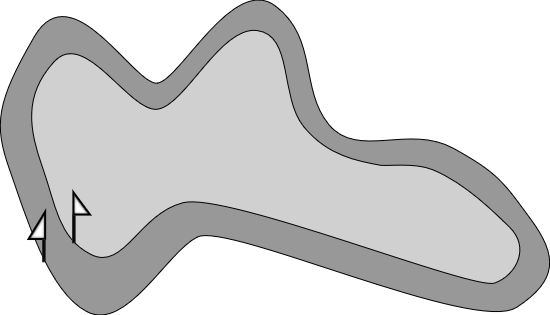
Offline Map
Offline
2
DGPS Coursewalk
\vdots
\vdots
. . .
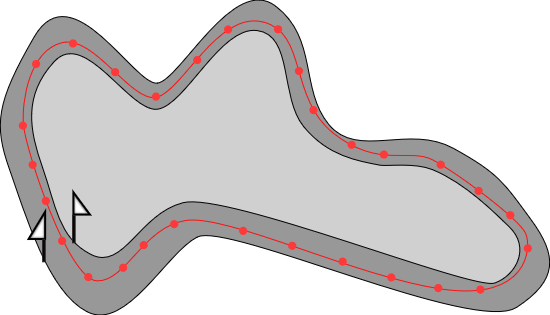
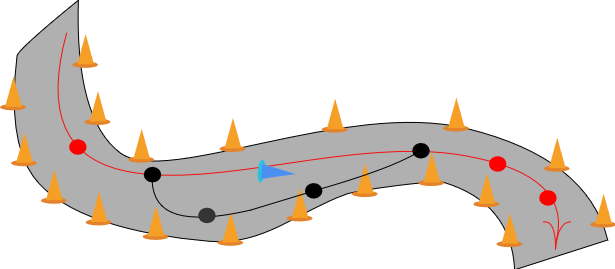
Line Calculation
Offline
3
Approximating the optimal line
Iterative process based on minimizing curvature on randomly placed nodes. Depends on:
- Mass of the car
- Friction coefficient
- Speed of the car
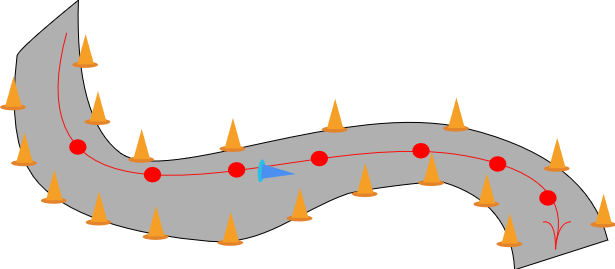
State Action Loop
Online
4
Sensors
Position
Next node to approach
Controller
gas °
brakes °
turning wheel °
Real World
- speed
- wheel motion
- ...
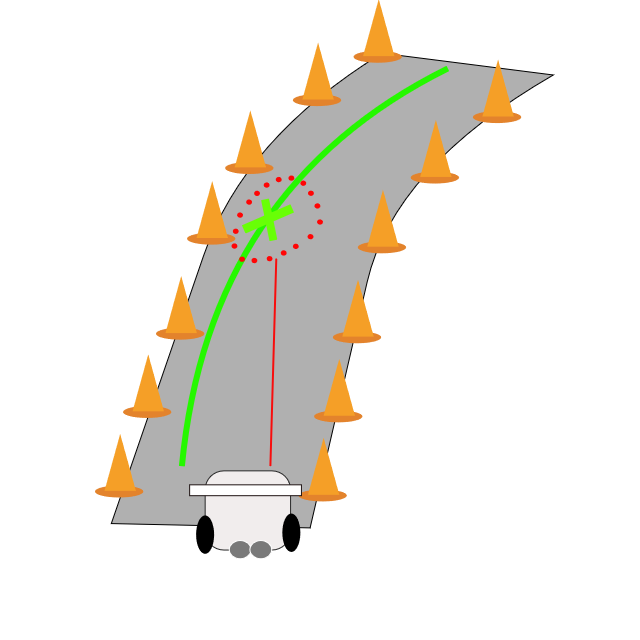
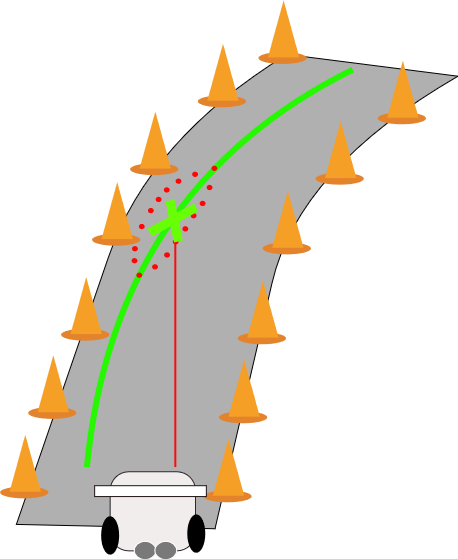
Collision Detection
Online
5
Sensors
Position
Next node to approach
C
Obstacle detected
Online recalculation with simple Monte Carlo
Controller
Online
6
C
Sensors
Line
Gas / Brake / Steering
Task:
- Be general enough to handle discrepancy between simulation and real world
- Be speed independent
- Be better than naive controller /w same line
- Be robust
Controller - Robustness
Online
7
Controller Training
Training
8
Controller
Sensors ~ CM
Line
Gas / Brake / Steering
CarMaker
Reward: -time
do action
Adversarial
Agent
Modify environment to disturb agent
Reward: time
Postface
9
\mathcal{PWd} \; \textit{17.1}