ROS Control
What
- ...is ROS Control?
- ...are the benefits?
- ...are the pieces?
- ...is available?
- ...is left to do?
or
What in the world has Clint been working on?
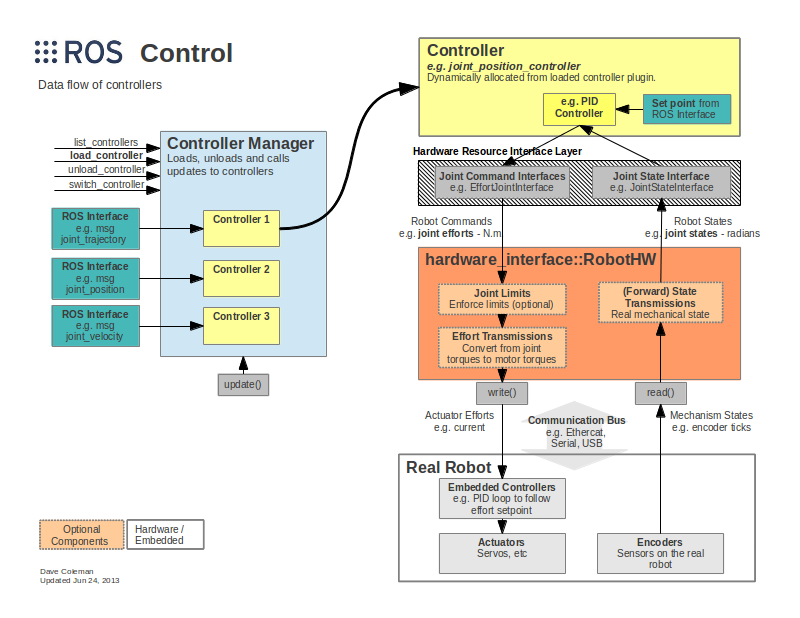
What is ROS Control?
An abstraction between controllers and hardware
Why switch?
- no single monolith
- implement individual controllers
- register controllers at launch
- safely switch controllers at runtime
- integrate different hardware into same control loop
Components
- hardware communication
- hardware interfaces
- controllers
- a control loop
- controller_manager (provided by ros_control)
libbarrett
Barrett's C++ library for communicating with the
WAM and BarrettHand
CANBus
- libbarrett uses pcan_net
- OWD uses pcan_char
barrett_ros_control
- library of ros_control hardware interfaces for Barrett Products
- binary that loads configuration and runs our control loop
The control loop breaks hardware communication into "tasks" that can be configured to run every N control cycles.
pr_ros_controllers
- Controllers and messages that aren't available elsewhere
- REWD (ROS Effort With Dynamics) controllers
- Separate message package for easy installation
REWD Controllers
- incorporates inverse dynamics in control loop
- accurate execution, even at speed
- enables more control modes, including gravity compensation
ros_control_client
- Python library for using the controller_manager and pr_ros_controllers
- Adapted from adapy
- Integrated into prpy and herbpy
controller_manager
- swaps loaded controllers intelligently and "safely"
- intelligently in that conflicting controllers are stopped automatically
- safely: no gap between controllers
- not safe: will gleefully unload critical controllers if asked
with ros_conrol_client:
- ros_control_client remembers which controllers were stopped so can appropriately start them again
- uses Python's with statement for this
- can also handle switching manually
Decomposed
pr_ros_controllers
barrett_ros_control

libbarrett
ros_control controllers
- Joint State Controller
- Joint Trajectory Controller
- Joint Group Effort Controller
- Force Torque Sensor Controller
our controllers
- REWD Gravity Compensation Controller
- REWD Joint Group Position Controller
- Position Command Controller
- Trigger Controller
Multiple Controllers:
HERB example
- joint_state_controller
- right_hand_controller
- force_torque_sensor_controller
- right_tare_controller
- right_gravity_compensation_controller
On Herb
- Services
- /controller_manager/list_controller_types
- /controller_manager/list_controllers
- /controller_manager/load_controllers
- /controller_manager/unload_controllers
- /controller_manager/switch_controllers
On Herb
- Action Topics
- /right_hand_controller/set_position/goal
- /right_joint_group_position_controller/command/goal
- /right_trajectory_controller/follow_joint_trajectory/goal
- /bimanual_trajectory_controller/follow_joint_trajectory/goal
- /right_tare_controller/trigger/goal
And left equivalents
On Herb
- Topics
- /joint_state
- /force_torque_sensor_controller/right/ft_wrench
Talk is cheap. Show me the code.
— Linus Torvalds
launching
ssh prdemo@herb0
screen -S ros_control
# will launch controller_manager and grav comp
roslaunch herb_launch ros_control.launch
rosservice call /controller_manager/list_controllersherbpy
# no change to basic functionality but
# ExecuteTrajectory will automatically load correct controller
traj = robot.right_arm.PlanToNamedConfiguration('home')
robot.ExecutePath(traj)
# manually set grav-comp/position control
robot.right_arm.SetStiffness(True)
# == SetStiffness(1) == SetStiffness(0.001)
# get some information
ft = robot.right_hand.GetForceTorque()herbpy
# NotImplementedError:
# Servoing and velocity control not yet supported
# under ros_control
robot.right_arm.Servo(vels)
# NotImplementedError:
# GetBreakaway is not yet implemented under ros_control
baw = robot.right_hand.GetBreakaway()
# NotImplementedError:
# The head is currently disabled under ros_control
robot.head.MoveTo([0.0, 0.3])not implemented
prpy + ros_control_client
from prpy.controllers import RewdOrTrajectoryController
from ros_control_client_py import ControllerManagerClient
robot = # ... herb
timed_traj = # ...
ctrl_manager = ControllerManagerClient()
with ctrl_manager.request('right_trajectory_controller'):
ctrl = RewdOrTrajectoryController(
robot,
'right_trajectory_controller',
robot.right_arm.GetJointNames())
ctrl.SetPath(timed_traj)
prpy.util.WaitForController(ctrl, timeout=20)What's left to be done?
- More REWD Controllers
- Trajectory Controller
- Move Until Touch Controller
- Joint Group Velocity Controller
- Sustained Force Controller
What's left to be done?
- More hardware support
- new head
- finger strain guages
- finger breakaway
- hand tactile sensors
What's left to be done?
- C++ controller_manager API
- aikido Executor integration
- Barrett auto-tensioning script
What's left to be done?
TESTING!!!
And that means you!