Learning Hamiltonians of constrained mechanical systems
Davide Murari
ECMI Conference, Wrocław, 2023
\(\texttt{davide.murari@ntnu.no}\)
Joint work with Elena Celledoni, Andrea Leone and Brynjulf Owren
Definition of the problem
GOAL : approximate the unknown \(f\) on \(\Omega\)
DATA:
Approximation of a dynamical system
Introduce a parametric model
1️⃣
3️⃣
Choose any numerical integrator applied to \(\hat{f}_{\theta}\)
2️⃣
Constrained Hamiltonian systems
Modelling the vector field on \(\mathcal{M}\)
On \(\mathcal{M}\) the dynamics can be written as
With \(W(q,p)\equiv 0\) when \(P(q)=I\).
⚠️ On \(\mathbb{R}^{2n}\setminus\mathcal{M}\) the vector field extends non-uniquely.
Learning constrained Hamiltonian systems
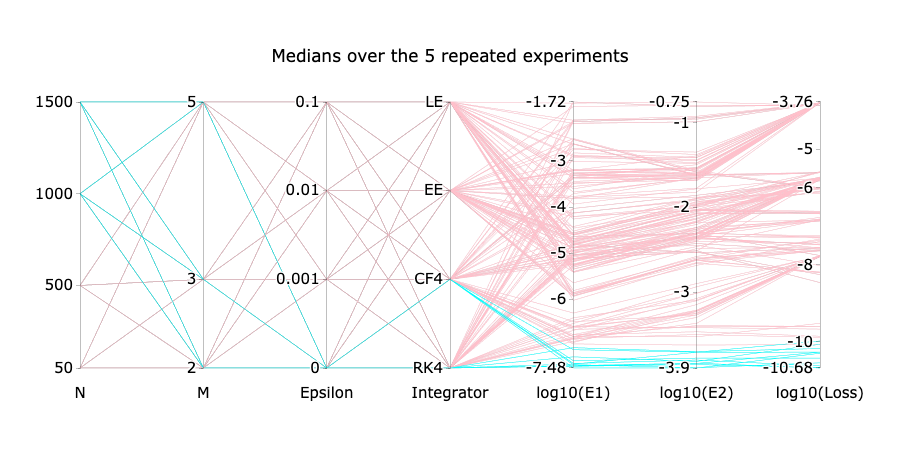
Measuring the approximation quality
Test initial conditions
A few words on the choice of the integrator
A case where preserving \(\mathcal{M}\) helps
Suppose to have just few unknown elements in the expression of the Hamiltonian
As a consequence, one expects a very accurate approximation.
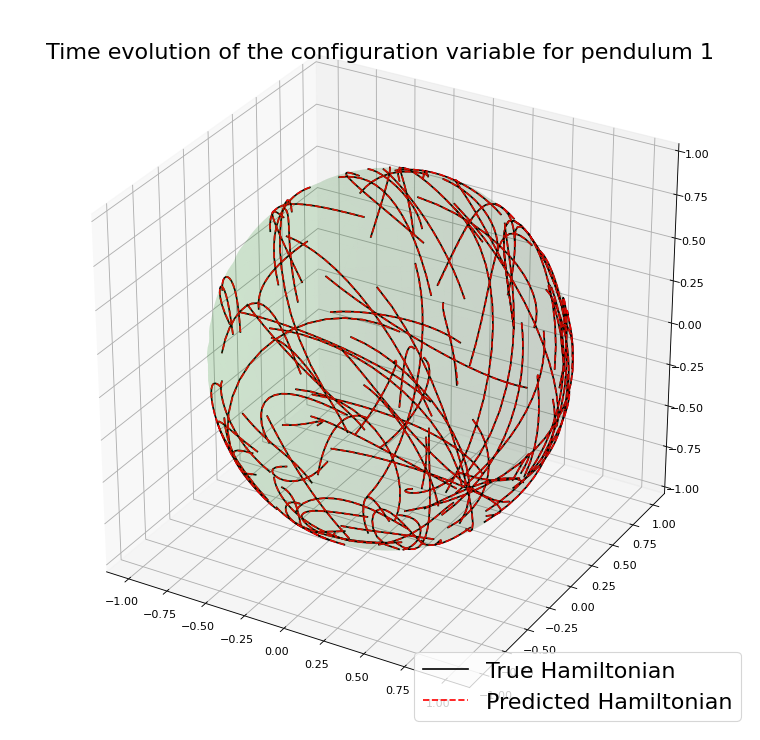
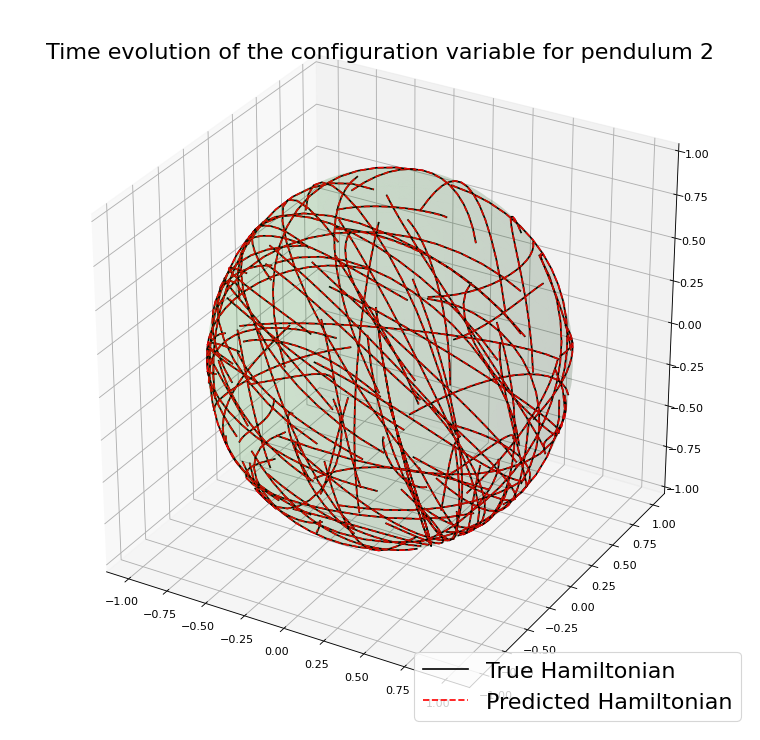
Example with the spherical pendulum:

Similar results preserving \(\mathcal{M}\)

Scan for an interactive
version of the plot
Thank you for the attention
Celledoni, E., Leone, A., Murari, D., & Owren, B. (2023). Learning Hamiltonians of constrained mechanical systems. Journal of Computational and Applied Mathematics, 417, 114608.
Example with the double spherical pendulum
Example with \(\mathcal{Q}=S^2\)
On \(\mathcal{M}\) the dynamics can be written as
Using an integrator \(\Psi^{\Delta t}_{\theta}\) that preserves \(\mathcal{M}\)
PROS
CONS
On \(\mathcal{M}\) the function \(H_{\theta}\) is unique
The approximation error is not influenced by the drift from the manifold.
These methods are more involved, and often implicit.
The loss function can become harder to be optimized.
The simulated trajectories in the training are physically meaningful.
Not in general clear the impact this has on the final result.
Case with \(\mathcal{M}\) homogeneous
A manifold \(\mathcal{M}\) is homogeneous if there is a Lie group \(\mathcal{G}\) that defines a transitive group action \(\varphi:\mathcal{G}\times\mathcal{M}\rightarrow\mathcal{M}\).
Case with \(\mathcal{M}\) homogeneous
A manifold \(\mathcal{M}\) is homogeneous if there is a Lie group \(\mathcal{G}\) that defines a transitive group action \(\varphi:\mathcal{G}\times\mathcal{M}\rightarrow\mathcal{M}\).
A vector field \(f\) on \(\mathcal{M}\) can be represented as \(f(x) = \varphi_*(\xi(x))(x)\), for a function
\(\xi:\mathcal{M}\rightarrow\mathfrak{g}\simeq T_e\mathcal{G}\).
Lie Group Methods are a class of methods exploiting this structure and preserving \(\mathcal{M}\). The simplest is Lie Euler:
\(y_i^{j+1} = \varphi(\exp(\Delta t \,\xi(y_i^j)),y_i^j)\)
Basic idea of a class of Lie group methods
\(\mathcal{M}\)
\(y_i^j\)
\(y_i^{j+1}=\varphi_g(y_i^j)\)
\(\mathfrak{g}\)
\(\xi\)
\(\exp\)
\(\mathcal{G}\)
\(\varphi_g\)
\(\Psi^{\Delta t}\)
\(0\)
\(\Delta t \xi(y_i^j)\)
\(g=\exp(\Delta t\,\xi(y_i^j))\)
\(f\in\mathfrak{X}(M)\)
\(f^L\in\mathfrak{X}(\mathfrak{g})\)