Dynamical systems' based neural networks
Davide Murari
davide.murari@ntnu.no
What are neural networks
They are compositions of parametric functions
\( \mathcal{NN}(x) = f_{\theta_k}\circ ... \circ f_{\theta_1}(x)\)
Examples
\(f_{\theta}(x) = x + B\Sigma(Ax+b),\quad \theta = (A,B,b)\)
ResNets
Feed Forward
Networks
\(f_{\theta}(x) = B\Sigma(Ax+b),\quad \theta = (A,B,b)\)
\(\Sigma(z) = [\sigma(z_1),...,\sigma(z_n)],\quad \sigma:\mathbb{R}\rightarrow\mathbb{R}\)
Neural networks motivated by dynamical systems
EXPLICIT
EULER
\( \Psi_{f_i}^{h_i}(x) = x + h_i f_i(x)\)
\( \dot{x}(t) = f(t,x(t),\theta(t)) \)
Time discretization : \(0 = t_1 < ... < t_k <t_{k+1}= T \), \(h_i = t_{i+1}-t_{i}\)
Where \(f_i(x) = f(t_i,x,\theta(t_i))\)
EXAMPLE
Examples of problems with a specific structure
What if I want the model to satisfy a certain property?
GENERAL IDEA
EXAMPLE
Property \(\mathcal{P}\)
\(\mathcal{P}=\)Volume preservation
Family \(\mathcal{F}\) of vector fields that satisfy \(\mathcal{P}\)
\(X_{\theta}(x,v) = \begin{bmatrix} \Sigma(Av+a) \\ \Sigma(Bx+b) \end{bmatrix} \)
\(\mathcal{F}=\{X_{\theta}:\,\,\theta\in\mathcal{A}\}\)
Integrator \(\Psi^h\) that preserves \(\mathcal{P}\)
Choice of dynamical systems
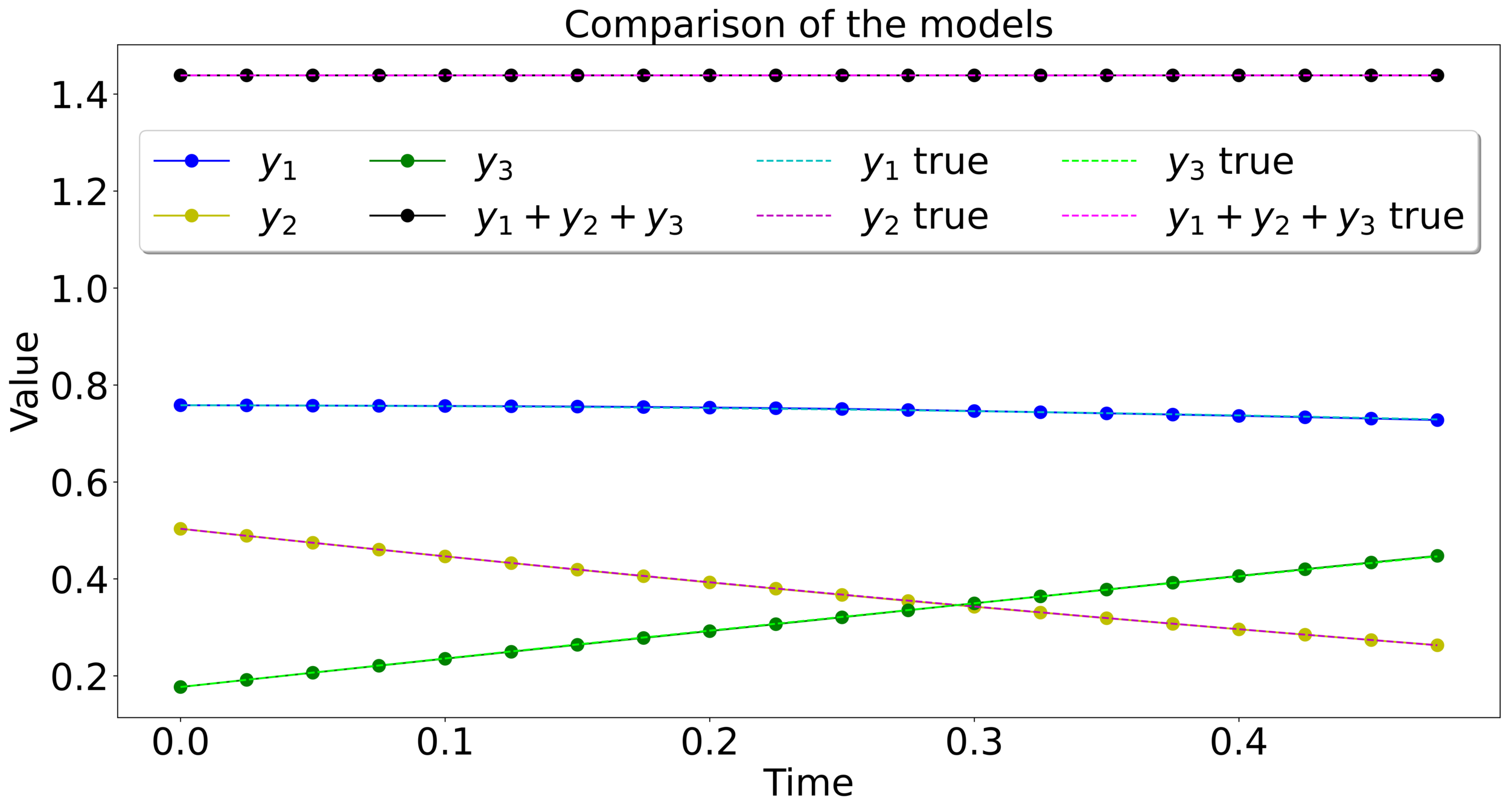
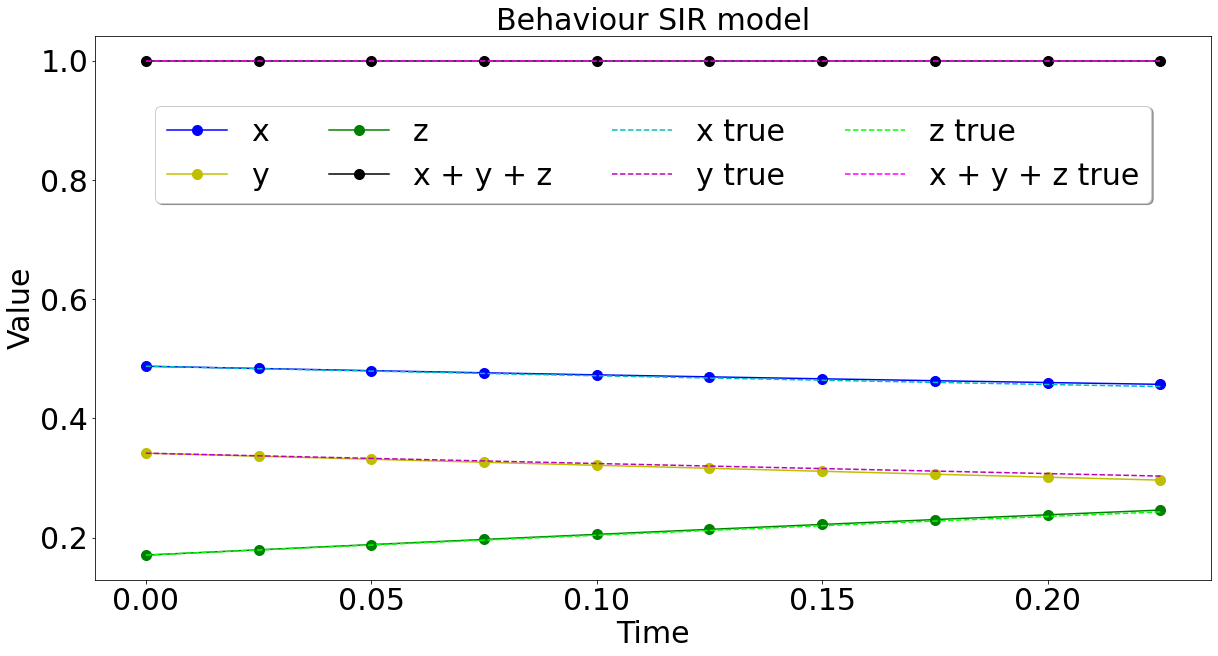
MASS-PRESERVING NEURAL NETWORKS
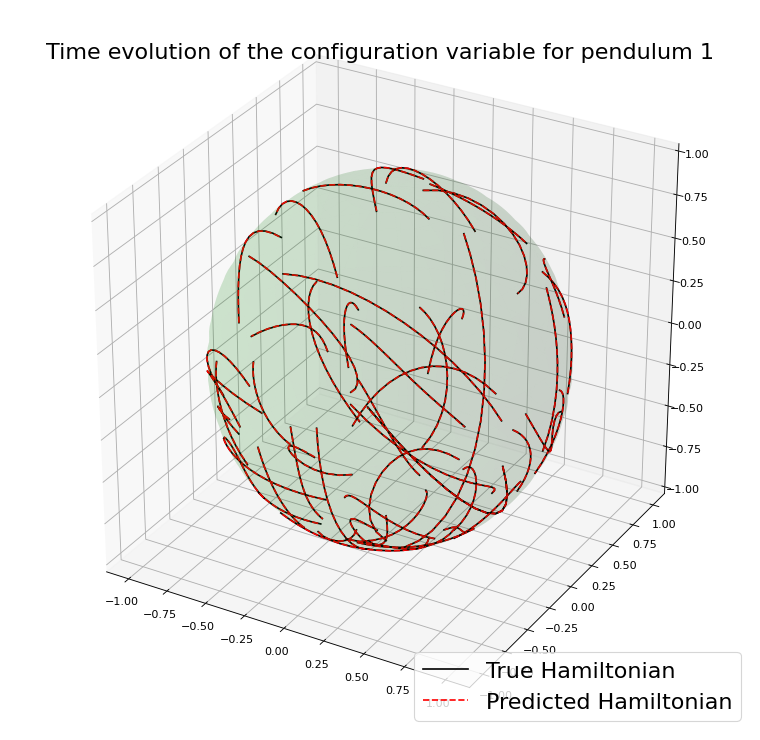
RANK PRESERVING NEURAL NETWORKS
Example