ННГУ им. Лобачевского 2022г.
Выполнил:
Хорькин Д.С. – 382006-3м
Научный руководитель:
Смирнов Л. А. – доцент, к. ф-м н.
Кластерные вращательные режимы в системе глобально связанных фазовых осцилляторов с инерцией
Магистерская диссертация
"Национальный исследовательский Нижегородский государственный университет им. Н. И. Лобачевского"
Институт информационных технологий, математики и механики
Кафедра: Теории управления и динамики систем
Направление подготовки: "фундаментальная информатика и информационные технологии"
где \(m\) - параметр инерции, \(\omega\) - постоянный вращающий момент, \(\alpha\) - фазовая задержка, \(N\) - общее число элементов
Введение и МОДЕЛЬ
[1] Sarkar M., Gupta S. Synchronization in the Kuramoto model in presence of stochastic resetting //arXiv preprint arXiv:2203.00339. – 2022.
[2] Sarkar M. Synchronization transition in the two-dimensional Kuramoto model with dichotomous noise //Chaos: An Interdisciplinary Journal of Nonlinear Science. – 2021. – Т. 31. – №. 8. – С. 083102.
[3] Solovev A., Friedrich B. M. Synchronization in cilia carpets and the Kuramoto model with local coupling: Breakup of global synchronization in the presence of noise //Chaos: An Interdisciplinary Journal of Nonlinear Science. – 2022. – Т. 32. – №. 1. – С. 013124.
[4] Wiesenfeld K., Colet P., Strogatz S. H. Synchronization transitions in a disordered Josephson series array //Physical review letters. – 1996. – Т. 76. – №. 3. – С. 404.
Модель Курамото описывает поведения большого набора связанных осцилляторов. Она мотивирована поведением реальных систем и нашла широкое применение в биологии, нейронауке и физике.
где \(m\) - параметр инерции, \(\omega\) - постоянный вращающий момент, \(\alpha\) - фазовая задержка, \(N\) - общее число элементов
Уединенные состояния
\(N - 1\)
\(1\)

Цель работы
Целью данной работы является определение характеристик двухкластерных вращательных режимов в системе Курамото с инерцией и связью Курамото-Сакагучи [6] для успешного достижения которой были поставлены следующие задачи:
- Определение областей существования и типов возникающих двухкластерных вращательных режимов в зависимости от управляющих параметров
- Определение устойчивости двухкластерных вращательных режимов в зависимости от управляющих параметров
-
Реализация программного комплекса, позволяющего эффективно находить интересующие вращательные движения, а также определять их устойчивость в произвольных системах связанных элементов
[6] H. Sakaguchi, Physical Review E 73, 031907 (2006).
где \(m\) - параметр инерции, \(\omega\) - постоянный вращающий момент, \(\alpha\) - фазовая задержка, \(N\) - общее число элементов
Замена: \(\beta = \frac{K}{N}\)
двухкластерное состояние:
двухкластерный режим
\(N - K\)
\(K < N/2\)
Замена переменных:

Динамика Расстройки фаз
\(T(\rho)\) - кривая Трикомми
Click on equation (based on link)


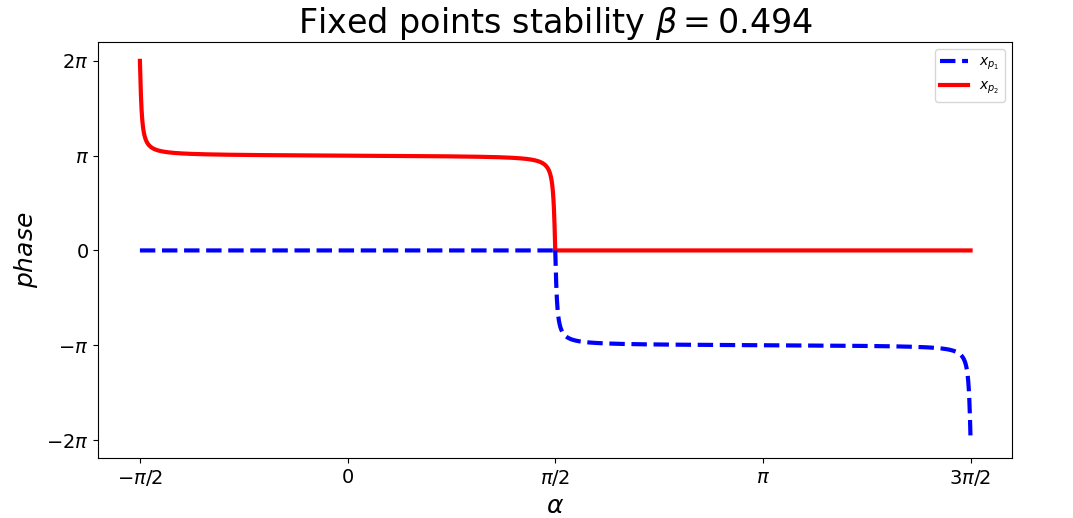
Анализ устойчивости стационарных состояний
При \(\beta \rightarrow 0.5\) стационарные состояния равновесия стремятся к \(\pi\)
Потеря устойчивости в исходной системе
Тык :)
ВРАЩАЮЩАЯся расстройка фаз: СУЩЕСТВОВАНИЕ
Уравнение границ зон существования:
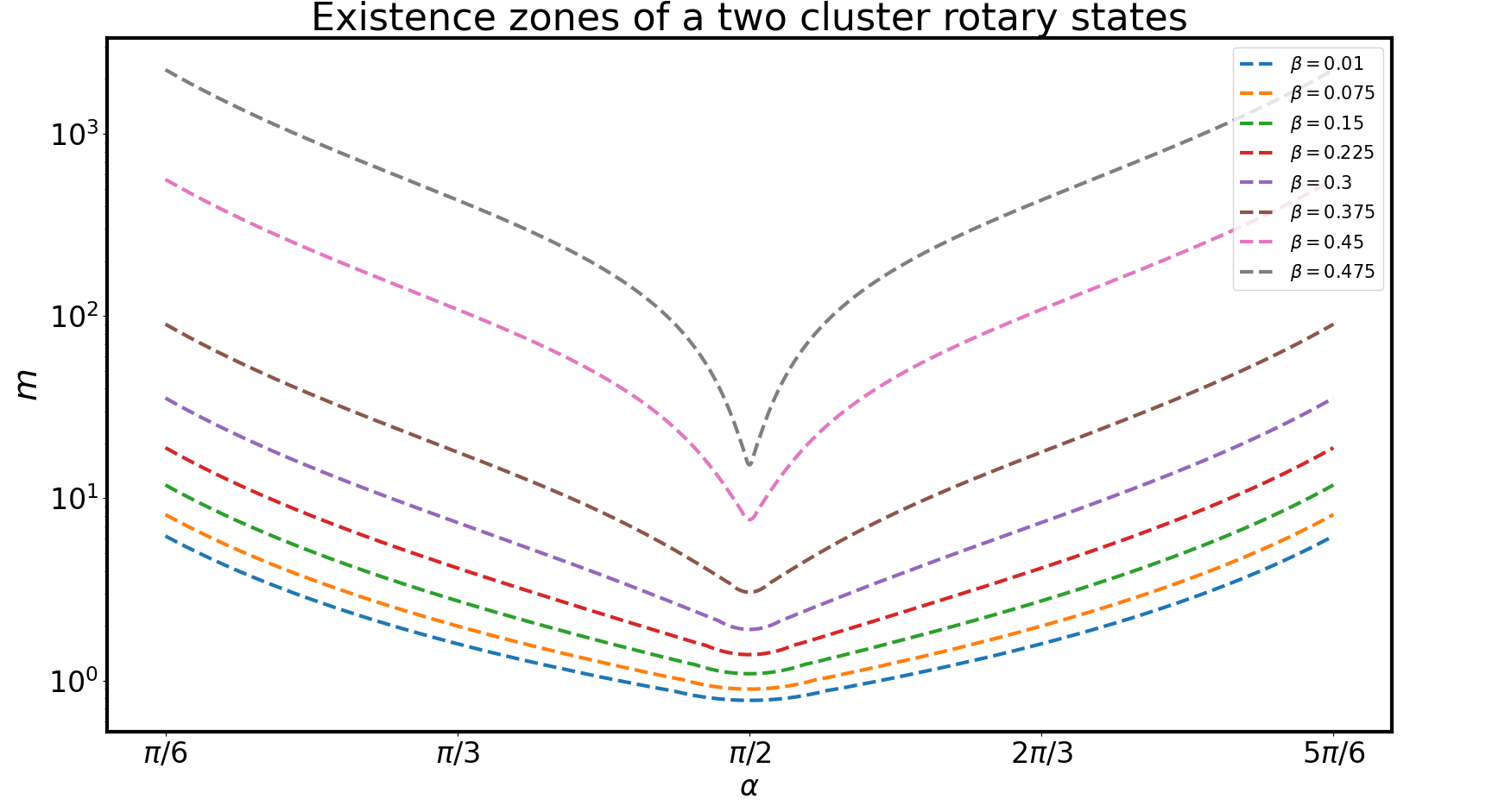
Режим при \(\beta = 0.5\) не существует. При фиксированном \(N\) cуществование режима при \(K=K^*\) также означает существование режимов \(K < K^*\)
двухкластерный режим
линеаризация \(\varphi_i = \psi_i + \delta_i\)
ВРАЩАЮЩАЯся РАССТРОЙКА ФАЗ: УСТОЙЧИВОСТЬ
Мультипликаторы для \(\eta_{1,2}\): 1, 1, \(\exp{-\frac{T_x}{m}}\), \(\exp{-\frac{T_x}{m}}\)
Замена координат:
ВРАЩАЮЩАЯся РАССТРОЙКА ФАЗ: УСТОЙЧИВОСТЬ
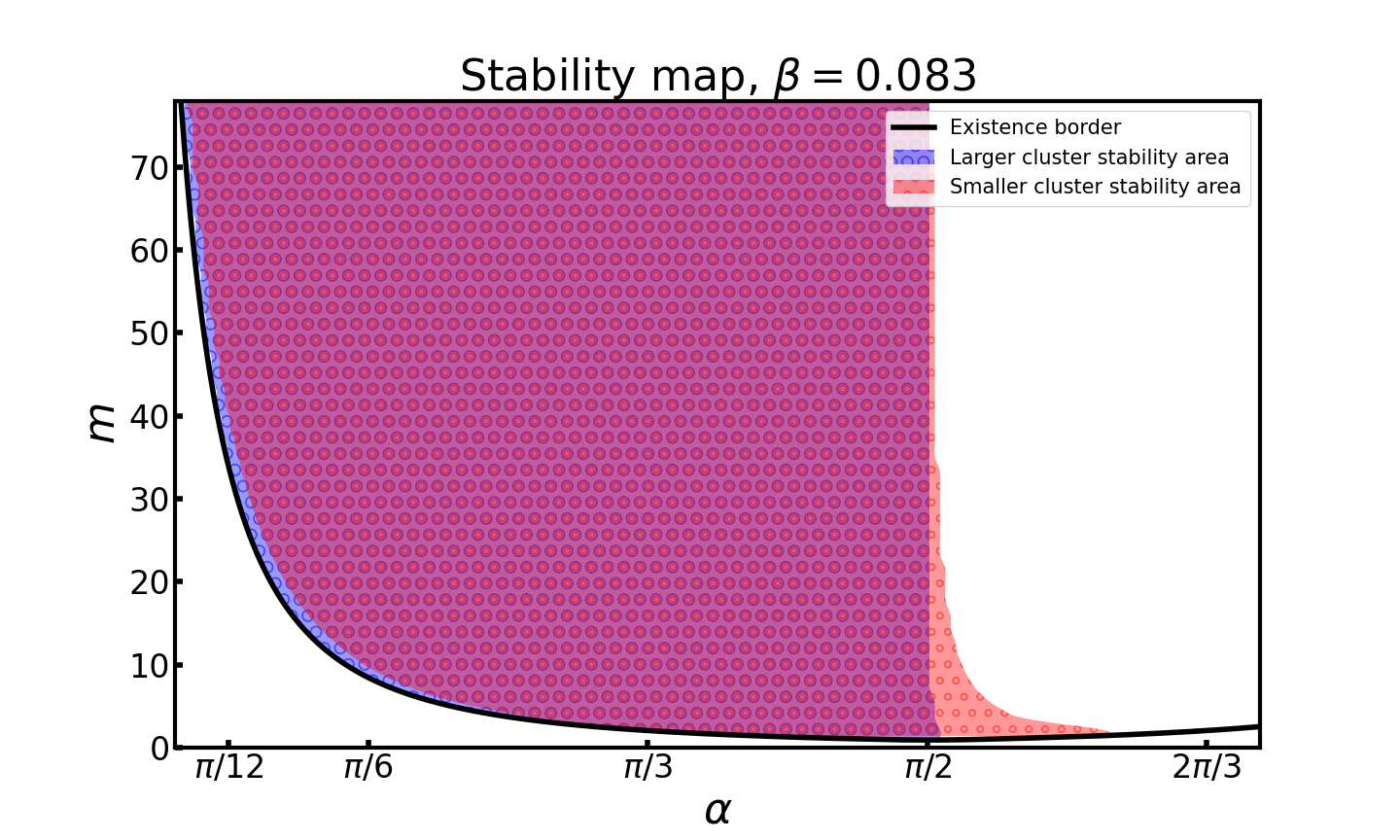
Карты устойчивости
Двухкластерный режим теряет устойчивость из-за потери устойчивости у одного из кластеров: как большего, так и меньшего

Карты устойчивости

Карты устойчивости
Область параметрической неустойчивости большого кластера. Развитие устойчивости в области отталкивающей связи

Карты устойчивости

Карты устойчивости
Развитие параметрической неустойчивости

Карты устойчивости
Разделение зоны устойчивости большого кластера на две несвязные компоненты. Развитие устойчивости в области отталкивающей связи

Карты устойчивости
пространственно временные диаграммы

пространственно временные диаграммы

пространственно временные диаграммы

пространственно временные диаграммы

пространственно временные диаграммы

ROTARY-STATES FRAMEWORK:
[7] Munyaev V. O. Khorkin, D., et al. Synchronization structures in the chain of rotating pendulums //Nonlinear Dynamics. – 2021. – Т. 104. – №. 3. – С. 2117-2125
[8] Munyaev V. O. Khorkin D., et al. Appearance of chaos and hyperchaos in evolving pendulum network //Chaos: An Interdisciplinary Journal of Nonlinear Science. – 2021. – Т. 31. – №. 6. – С. 063106
[9] Khorkin, D., Bolotov, M., Smirnov, L. et al. Phase Control for the Dynamics of Connected Rotators. Autom Remote Control 81, 1499–1506 (2020)
Предыдущие работы, использующие функциональность данного программного комплекса:
Спасибо за внимание
- получено уравнение, описывающее границы областей существования интересующего вращательного движения
- показано, что в системе существует два типа двухкластерных вращательных движений. Первый характеризуется постоянной расстройкой фаз, второй характеризуется вращающейся расстройкой фаз.
- двухкластерное вращательное движение с постоянной расстройкой фаз является неустойчивым при любых значениях управляющих параметров
- получена система независимо описывающая устойчивость каждого кластера
- построены карты устойчивости двухкластерного режима в области параметров \(m\), \(\alpha\) в зависимости от параметра \(\beta = \frac{K}{N}\)
- показано, что устойчивость двухкластерного режима часто может теряться из-за потери устойчивости у одного из кластеров, как малого, так и большого
- разработан программный комплекс, позволяющий эффективно находить интересующие вращательные режимы и определять их устойчивость.