My Experience with (Project) Tango
A practical introduction to consumer SLAM
This presentation available here:
https://goo.gl/XuYGur
About Me
- Background in Data Management & Enterprise Architecture
- Working on my third startup.
- Photo nerd
- Passionate about VR/AR*
- Have been playing around with volumetric capture for about 5-6 years
- Only recently gotten serious about it (2nd half of 2016)

About Constructive Realities (link)
- Explorer - Kit with hardware and capture software
- WebVR based content editing
- Post-processing & Publishing
- More
Volumetric data capture and management solutions for home & business. We mix hardware & software to make reality capture, processing and authorization easier and more affordable.
CV Terminology
Structured Light (Laser Scanning & Kinect)
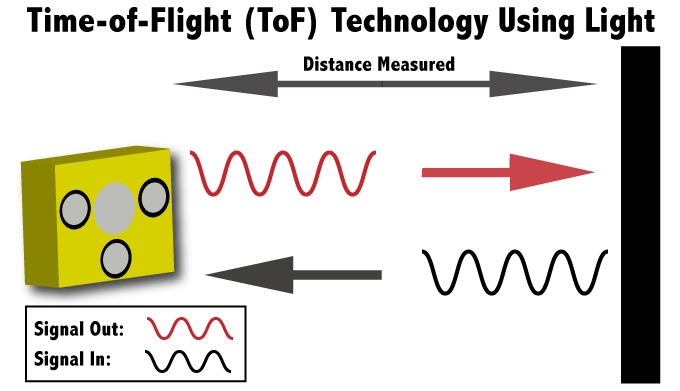
ToF - Time of Flight (Kinect V2 & Tango)
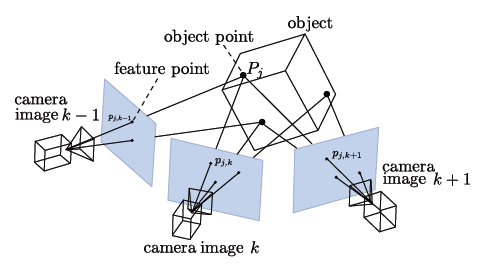
SfM (Structure from Motion)
(more) CV Terminology
SLAM - Simultaneous Localization and Mapping (wikipedia)
Loop Closure - (wikipedia)
Pose Estimate
"...updating a map of an unknown environment while simultaneously keeping track of an agent's location within it."
The system's best guess about the position and orientation of the device at a point in time.
The identification and integration new information path representing already-mapped area(s)*
Odometry (wikipedia)
..."the use of data from motion sensors to estimate change in position over time."
Kinect V1
CV Toybox (Stuff i've Played With)

Structure.io (link)

Fab SCAN (link)
Google Tango (link)

Artec EVA (link)
But Let's Focus on Tango
(disclaimer: mapping; not entertainment)
TLDR; Google Consumer SLAM
As Google as consumed the outside mapping work with Google Earth and Google Maps, it will cross the threshold and do the same for indoor spaces.
Tango is Google first step to this end.
Takeaway is that Tango is not just a CV API, It also contains high level semantics to describe spaces (IA)
see: Area Description Manager

Inspirational Video (Link)



Unsupported!
Unsupported!
Lenovo Phab 2 Pro
- Snapdragon Proccessor
- Infineon ToF Sensor (PMD design)
- 64GB Storage
- Worst RGB Camera on a current generation phone
Takeaway: If you don't HAVE TO HAVE ONE NOW, likely much better to wait for the Asus Zenphone AR (link)
Just for Reference
PMD ToF Sensor (Picoflexx): 590 Euros
Phab 2 Pro : $500
Costs less to buy the sensor wrapped in a phone!
(mostly) Consistent Tango API Implementation
- C++
- Java
- C# (Unity)
API Provides update callbacks for ket capture data like:
- onFrameAvailable (2D)
- onPointCloudAvailable (3D)
- onPoseAvailable (6-DoF)
API
Unsupported!
Unsupported!
Tango (mapping) App Landscape - March 2017
Export Mesh
Raw Stream
Texturing
Tracking Performance
Maybe a few other random ones...
Export Clouds
Local Post Process
Remote Post Process
Multi-session
Consumes all space on device upon using
*
RTAB MAP
powerful, adaptable, Extensible
- Open source Project
- https://introlab.github.io/rtabmap/
- Permissive BSD license if openCV w/o nonfree
- Prebuilt binaries forAndroid, Windows, Linux & MacOS
- Capable of saving all captured data (RBG/D/6DoF).
- Runs online and offline
- Many many options in offline mode
- Multi session!
- Mailing List, Wiki, Tutorials & More.
RTAP-MAP is *just* algorithm at the core of this project ; there is a lot of tooling built up around to facilitate capture, post & reprocessing.
It's a great tool
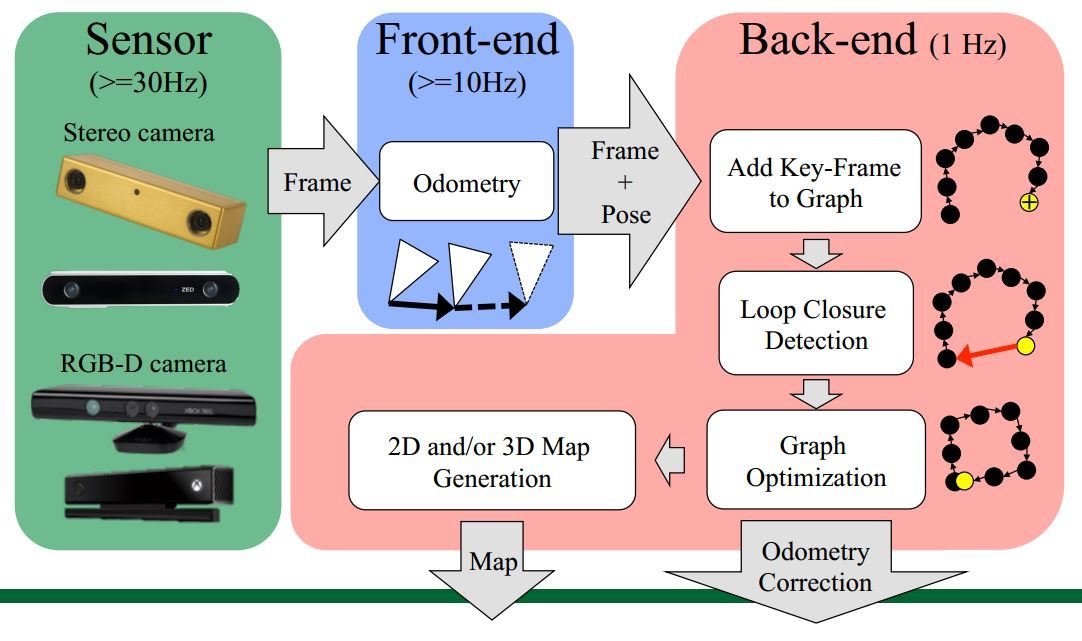
RTAB MAP - Overview
MeToo!
More About the algorithm
DayTime Exterior
Captured with prototype stabilizer system in mid day light (slightly cloudy) Capture time approximately 3 mins.
Indoor Room
Haphazardly created. but colors worked out nicely
Examples 1
Bedroom
Captured with prototype stabilizer system in low illumination. Capture time approximately 4 mins.
Shop
Single model created from 5 mapping sessions. Capture time ~10 minutes.
Examples 2
Bedroom
Handheld capture in ample sunlight Capture time approximately 2 mins.
Examples 3
Live Demo?
Interested in this Professionally?
have CV experience?
C/C++ & Java+
WebVR, Javascript, NodeJS, React/Angular
Neo4j, Postgres.
eric@constructiverealities.io