PHYS 207.013
Chapter 11
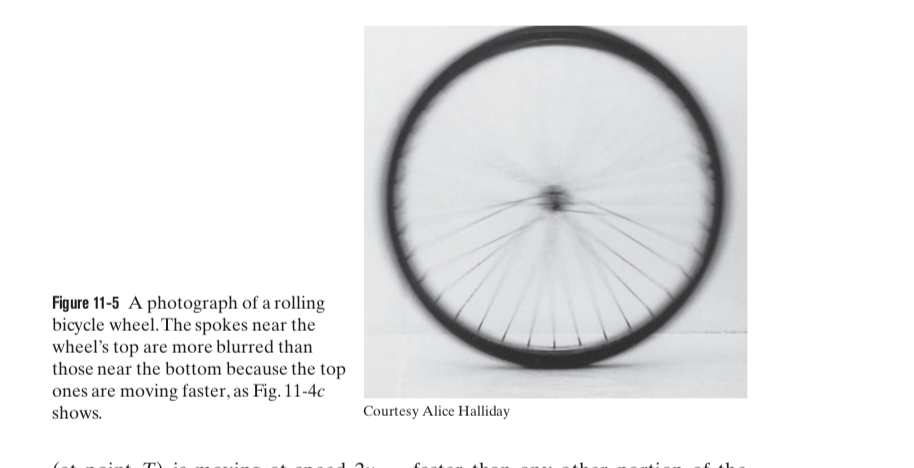
rolling motion
Instructor: Dr. Bianco
TAs: Joey Betz; Lily Padlow
University of Delaware - Spring 2021


Decolonizing science
work and rotational K
Remember:
For rotation
work and rotational K
Remember:
For rotation
work and rotational K
Remember:
For rotation
work and rotational K
Remember:
For rotation
work and rotational K
Remember:
For rotation
rolling kinematics
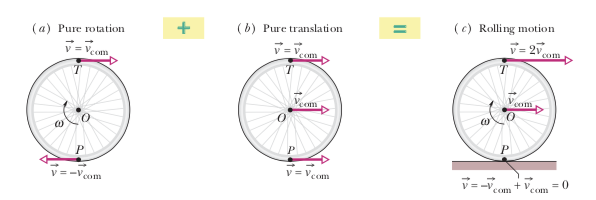
rolling kinematics

rolling kinematics
rotational inertia abour axis of rotation P
P
rolling kinematics
rotational inertia abour axis of rotation P
P
Parallel axis theorem
CoM
rolling kinematics
rotational inertia abour axis of rotation P
P
Parallel axis theorem
CoM
rolling kinematics
rotational inertia abour axis of rotation P
P
Parallel axis theorem
CoM
rolling kinematics
rotational inertia abour axis of rotation P
P
Parallel axis theorem
CoM
rolling kinematics
rotational inertia abour axis of rotation P
P
Parallel axis theorem
CoM
K associated to rotation
rolling kinematics
rotational inertia abour axis of rotation P
P
Parallel axis theorem
CoM
K associated to rotation
K associated to translation
rolling kinematics
rolling kinematics: down a ramp
N
mg
fs
maCOM
rolling kinematics: down a ramp
N
mg
fs
maCOM
=>
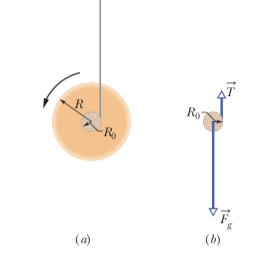
rolling kinematics: a yoyo
N
mg
fs
maCOM
=>
rolling kinematics: a yoyo
rolling kinematics: energy
h
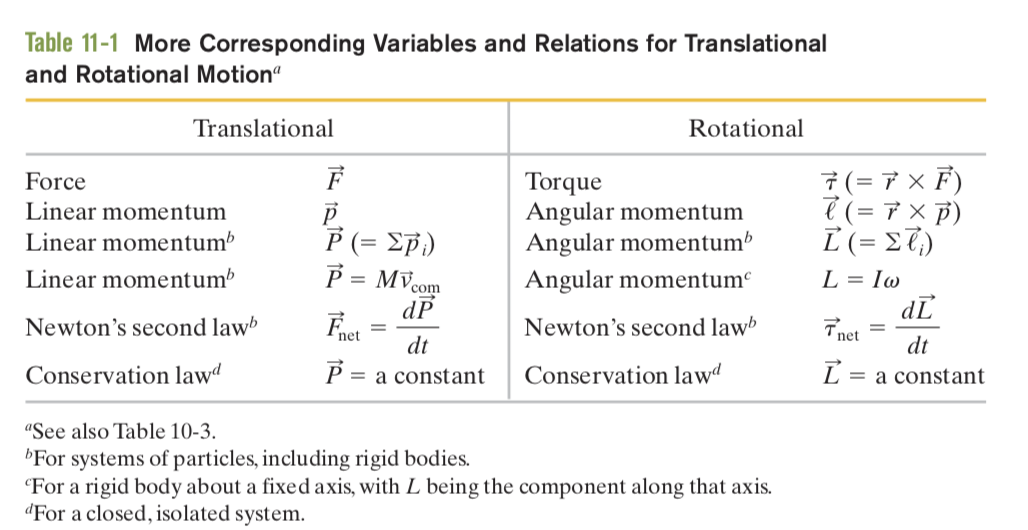
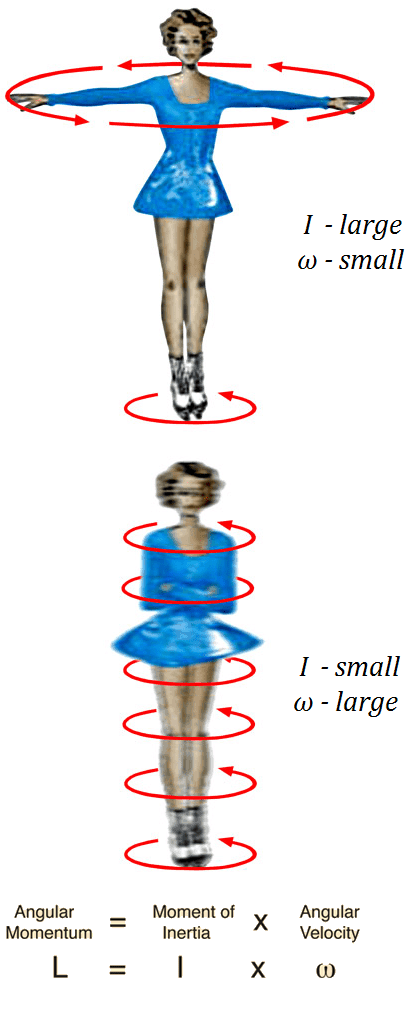
Angular momentum
0
Angular momentum
0
Angular momentum
Angular momentum conservation
Angular momentum
Angular momentum conservation
Angular momentum
Angular momentum conservation
Angular momentum
Angular momentum conservation
CoM
= const
M
Angular momentum
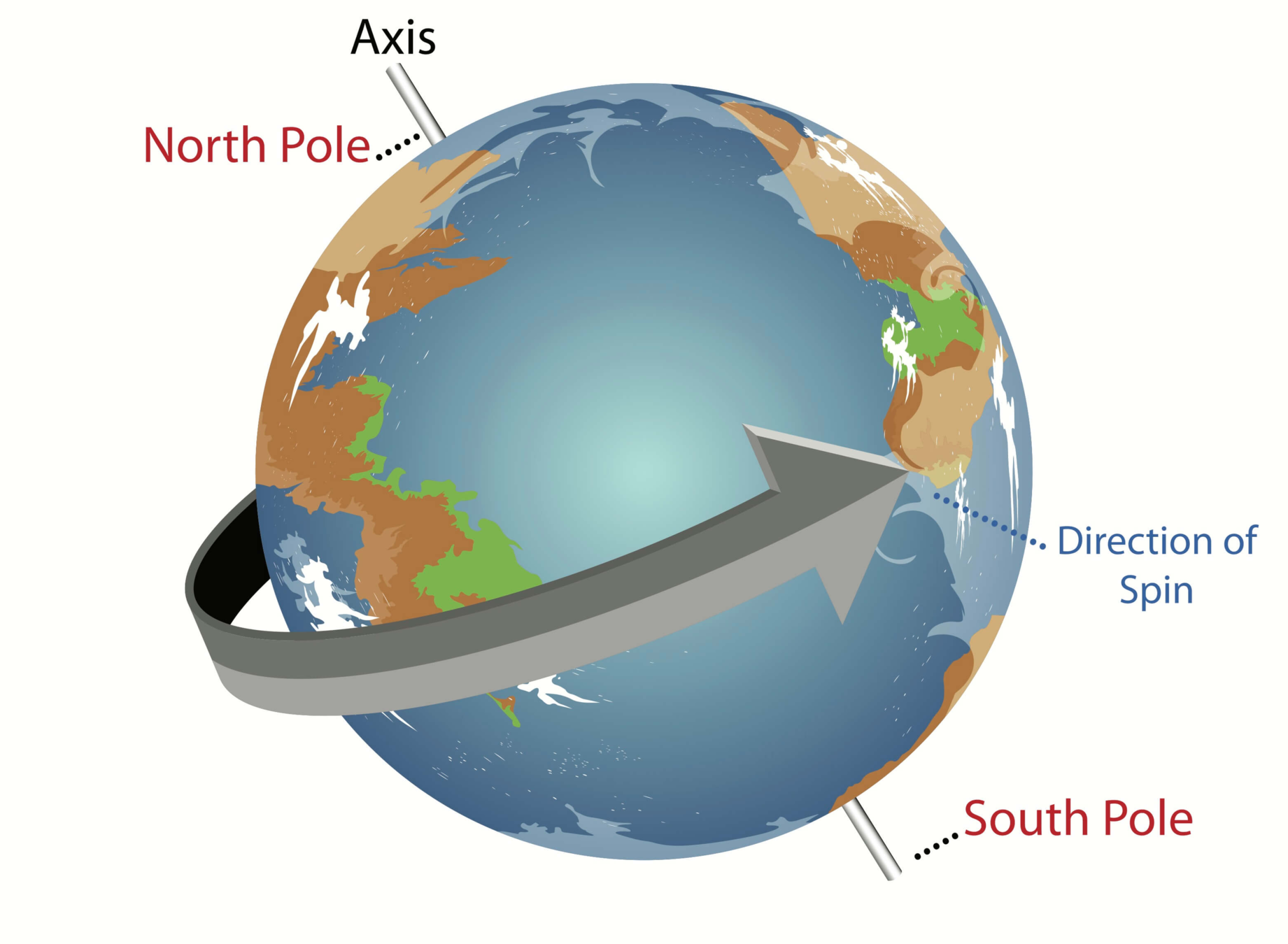
Angular momentum is conserved!
if the object rotates along an axis that goes through its CoM the Angular Momentum is Conserved (sometimes we call it the "Spin")
= const
Angular momentum
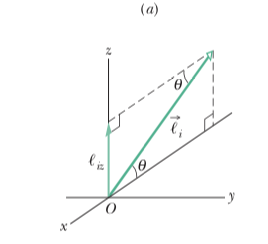
Angular momentum of a rigid body

Angular momentum
Angular momentum of a rigid body
line of action
moment arm
Angular momentum
Angular momentum of a rigid body
moment arm
Fnet = 0 because of symmetry
line of action
CoM
Angular momentum
Angular momentum of a rigid body
Angular momentum
The Angular momentum of a system is conserved IF THERE ARE NO EXTERNAL FORCES
Angular momentum
is the reason why we exist!

Angular momentum
is the reason why we exist!
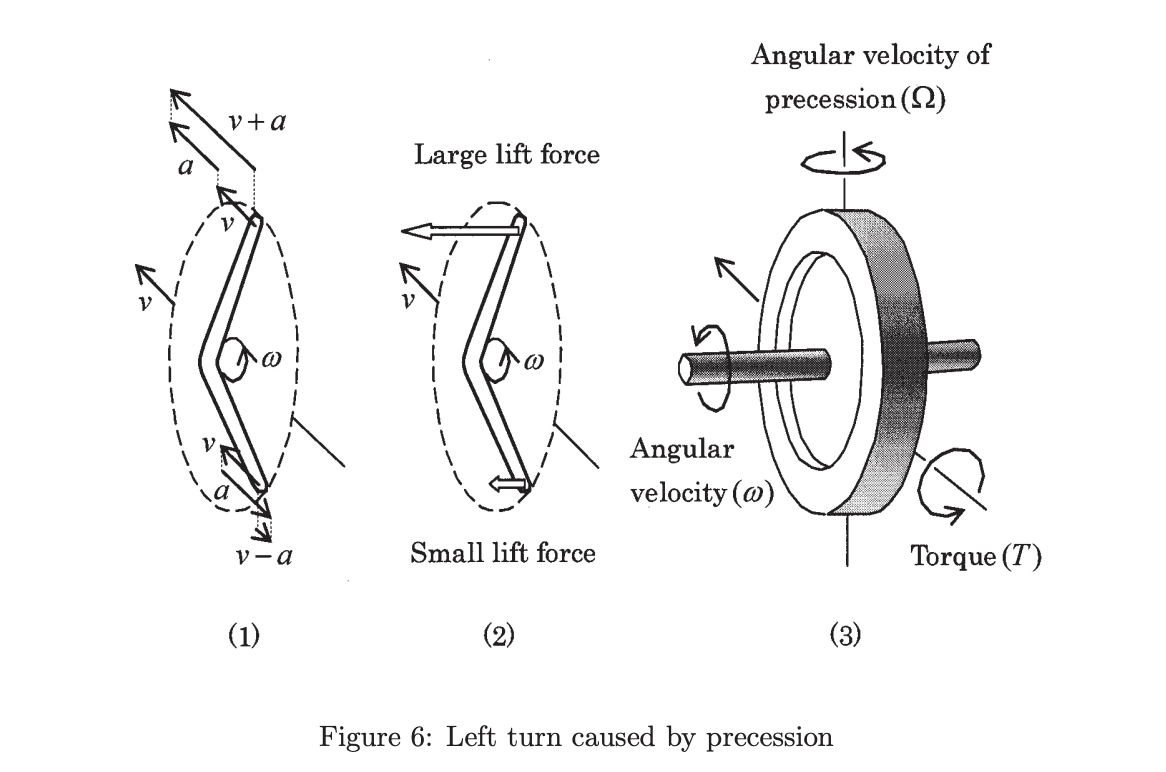
Gyroscope
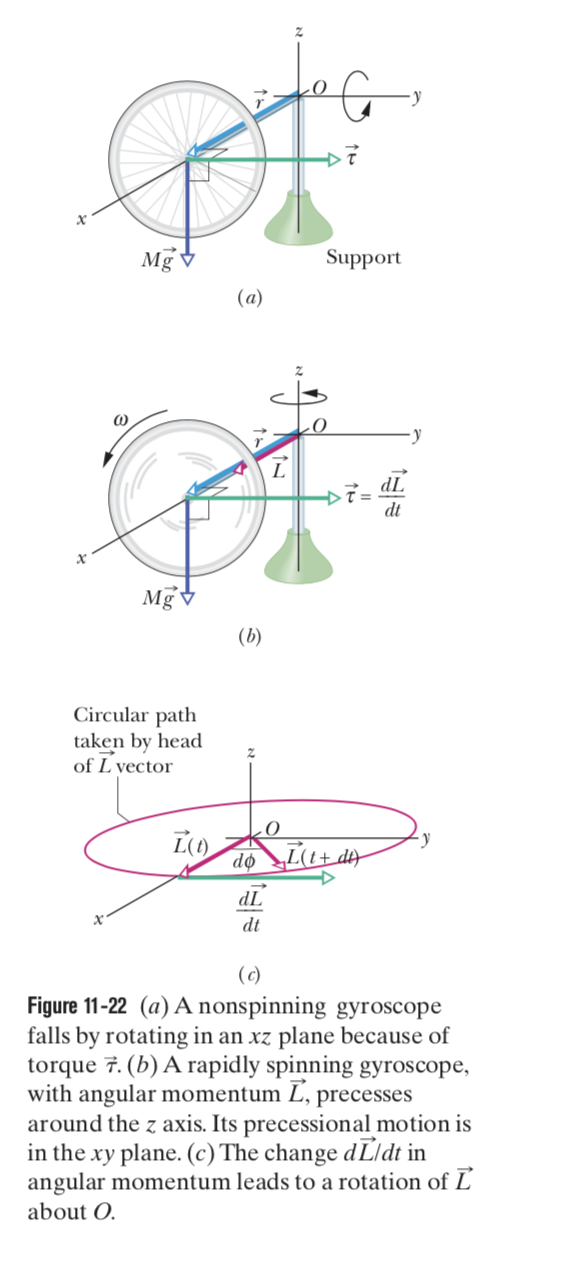
is it magic??? no: its torque + angular momentum.
Gyroscope
is it magic??? no: its torque + angular momentum.
this change in the direction of orientation of the axis of rotation of a body is called
PRECESSION
Gyroscope
is it magic??? no: its torque + angular momentum.
Gyroscope
is it magic??? no: its torque + angular momentum.
Gyroscope
is it magic??? no: its torque + angular momentum.
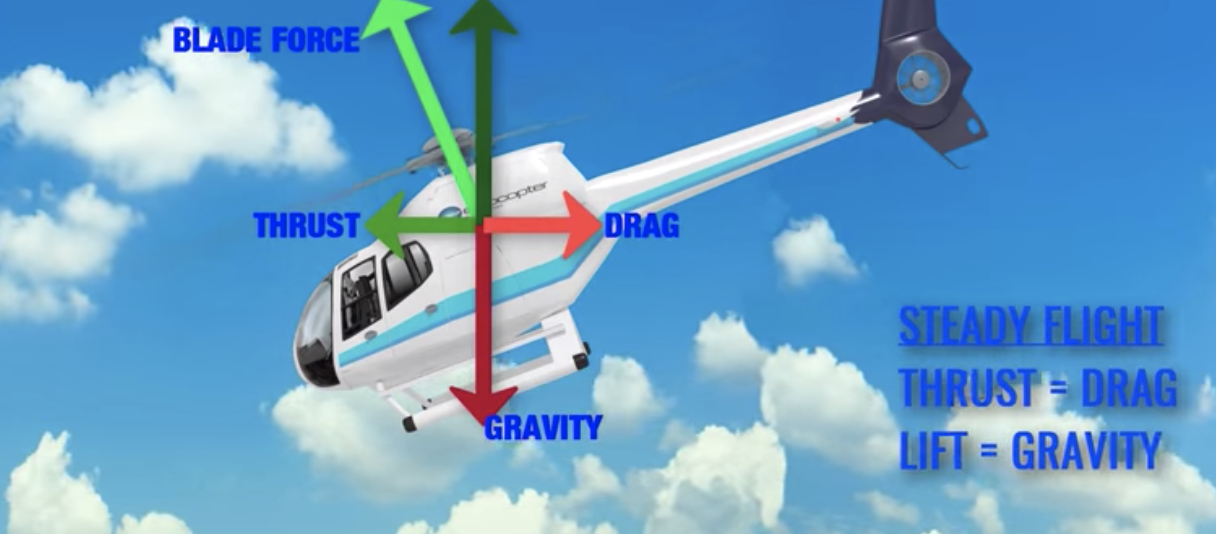
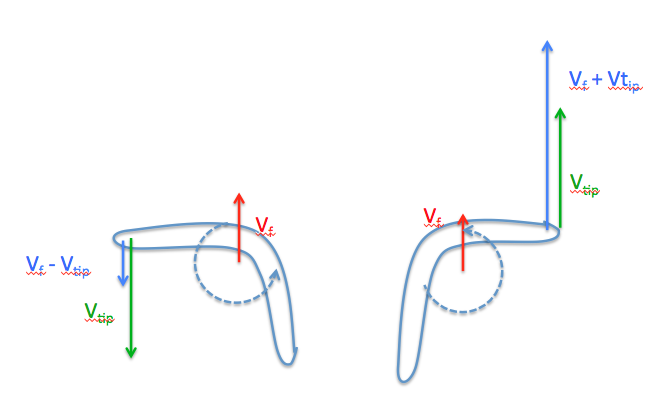
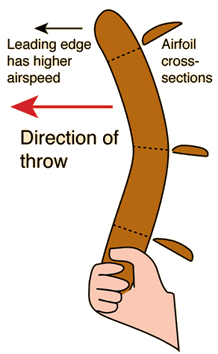
so the blades can change pitch to provide more lift.
on which blade would you provide the lift to tilt the helicopter forward???
we will talk about it in class on Tuesday!

A
B
C
D
Gyroscope
A
D

Gyroscope
Gyroscope
summary