











federica bianco PRO
astro | data science | data for good
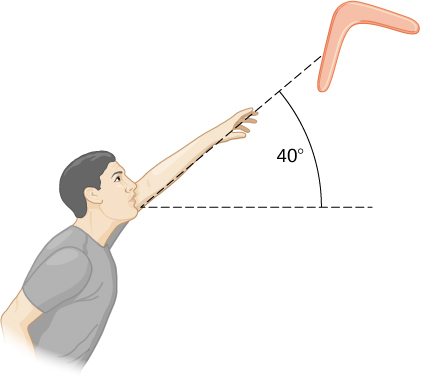
rotation
Instructor: Dr. Bianco
TAs: Joey Betz; Lily Padlow
University of Delaware - Spring 2021
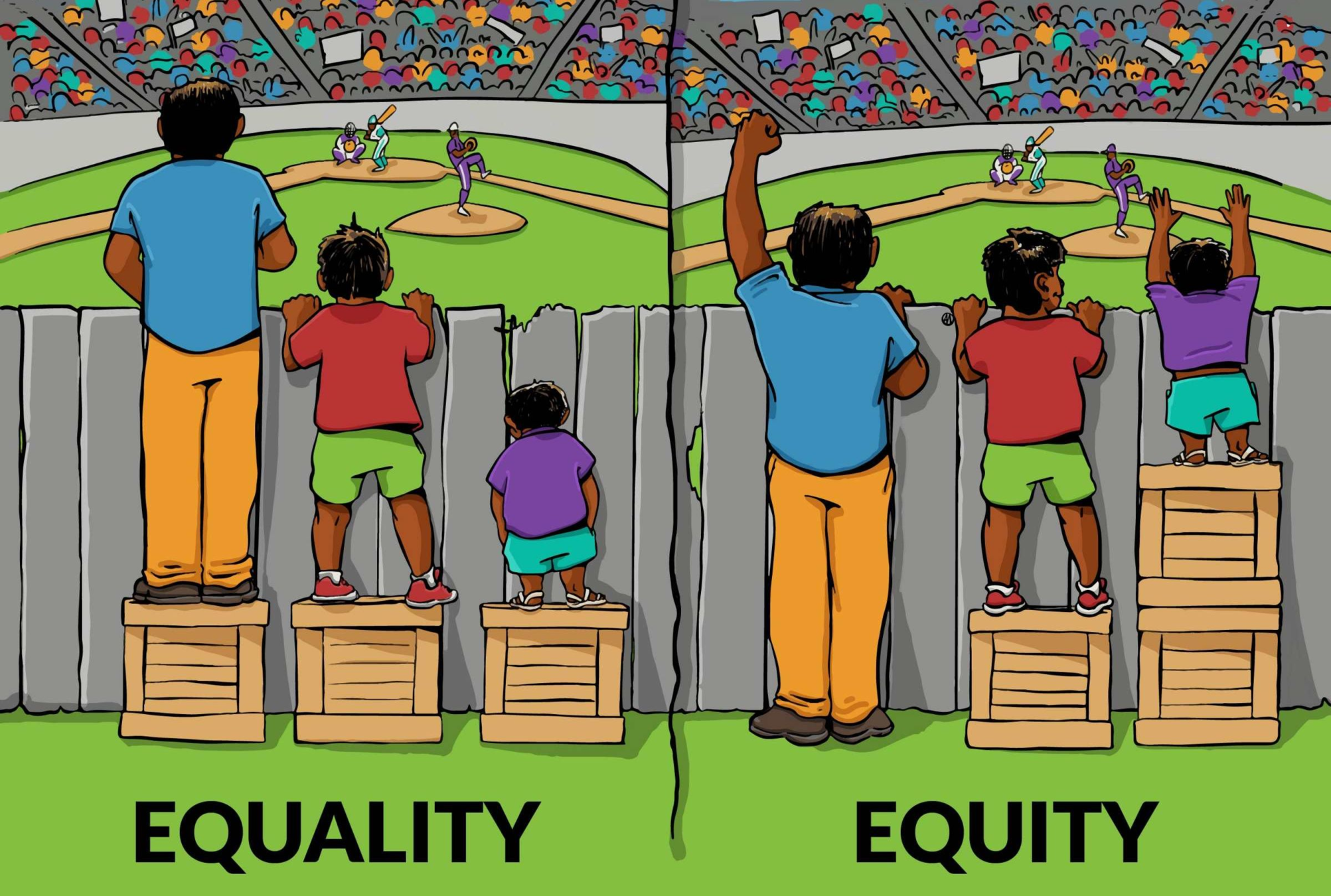
Equity in physics classes
You have the right to the space that you need to succeed based on your identity
Equity in physics classes
How is it possible that the canon of thought in all the disciplines of the Social Sciences and Humanities in the Westernized university [...] is based on the knowledge produced by a few men from five countries in Western Europe (Italy, France, England, Germany and the USA)? How is it possible that men from these five countires achieved such an epistemic privilege to the point that their knowledge today is considered superior over the knowledge of the rest of the world? How did they come to monopolize the authority of knowledge in the world? Why is it that what we know today as social, historical, philosophical, or Critical Theory is based on the socio-historical experience and world views of men from these five countries?
Equity in physics classes
Decolonizing science
Think about examples of knowledge related to physics that do not come from European-Western culture
ZOOM breakout rooms of 4-5 students
Decolonizing science
Think about examples of knowledge related to physics that do not come from European-Western culture
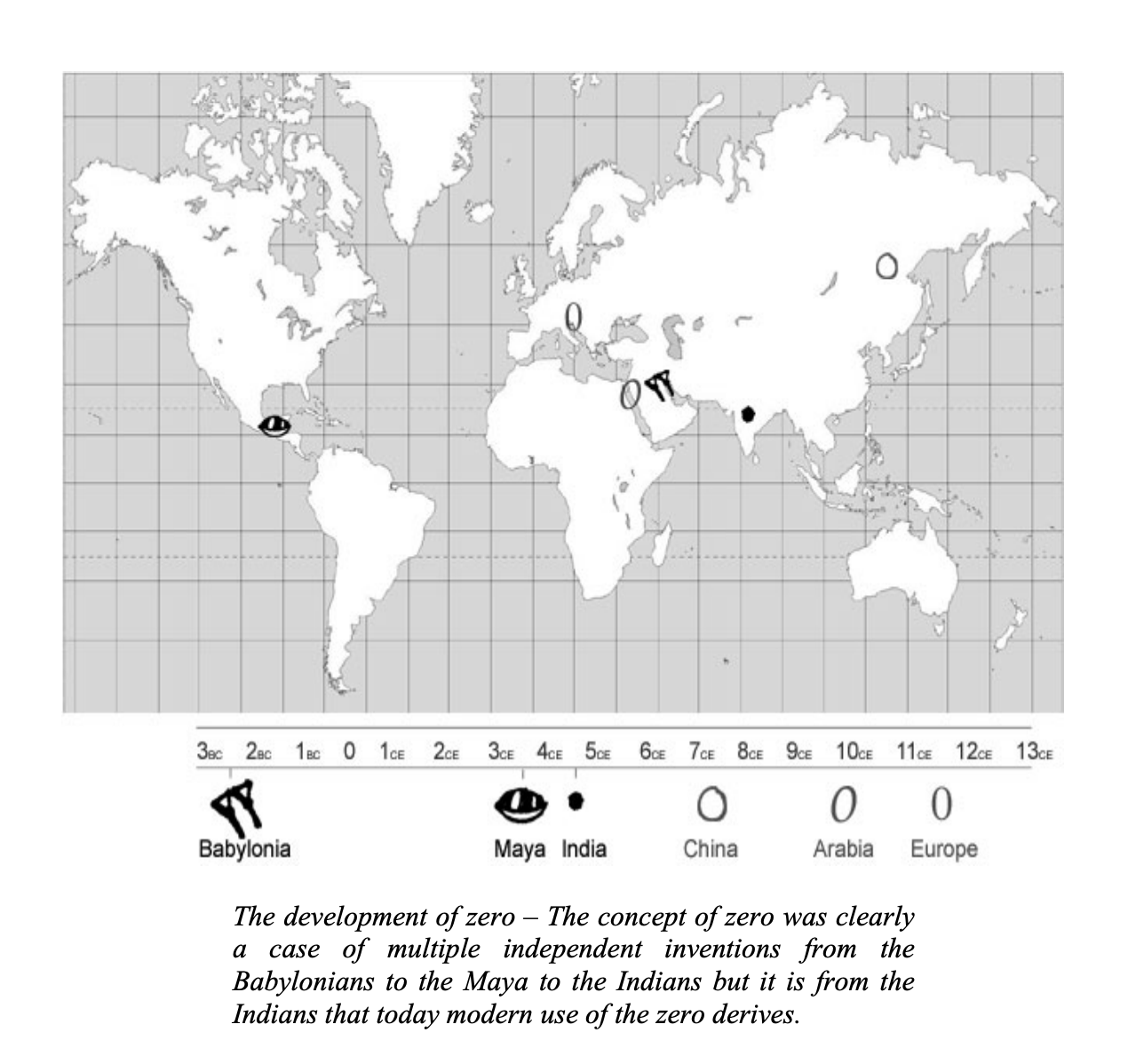
the invention of 0 is indian - also mayan arab and chinese - decidedly NOT European
Decolonizing science
Think about examples of knowledge related to physics that do not come from European-Western culture
In fact while Arabs codified and diffused algebra the Europe was in the "Dark Ages"
Decolonizing science
Think about examples of knowledge related to physics that do not come from European-Western culture
Nilakantha Somayaji 14 June 1444 – 1544
discovers an infinite series for π.
conceptualizes heliocentric system
Decolonizing science
Think about examples of knowledge related to physics that do not come from European-Western culture
12th century AD: Jewish polymath Baruch ben Malka, later Abu'l-Barakāt al-Baghdādī, in Iraq formulates a qualitative form of Newton's second law for constant forces.
An explanation of the acceleration of falling bodies as the accumulation of successive increments of power (ref) === Newton laws 300 years early!
Decolonizing science
Think about examples of knowledge related to physics that do not come from European-Western culture
Until recently, people believed that vulcanization–combining rubber with other materials to make it more durable–was discovered by the American Charles Goodyear in the 19th century. However, historians now think that the Maya were producing rubber products about 3,000 years before Goodyear received his patent in 1843. https://www.history.com/topics/ancient-americas/mayan-scientific-achievements
Decolonizing science
Think about examples of knowledge related to physics that do not come from European-Western culture
HOMEWORK
Equity in physics classes
You have the right to the space that you need to succeed based on your identity
Equity in physics classes
You have the right to the space that you need to succeed based on your identity
H&R CH10 rotation
radians
radians
degree
=> radians are revolutions
H&R CH10 rotation
radians
angular displacement:
H&R CH10 rotation
radians
angular displacement:
angular velocity:
H&R CH10 rotation
radians
angular displacement:
angular velocity:
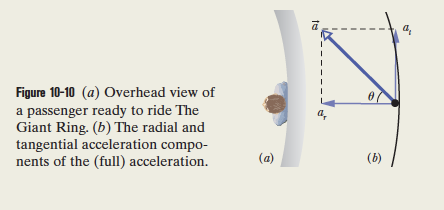
H&R CH10 rotation
radians
angular velocity:
angular acceleration:
H&R CH10 rotation
radians
radians
degree
circumference:
H&R CH10 rotation
radians
radians
degree
circumference:
linear speed:
MATH REVIEW:
trigonometry
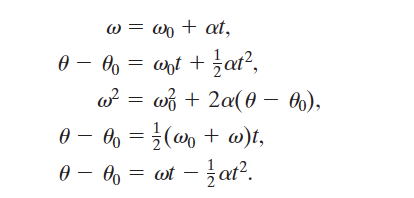
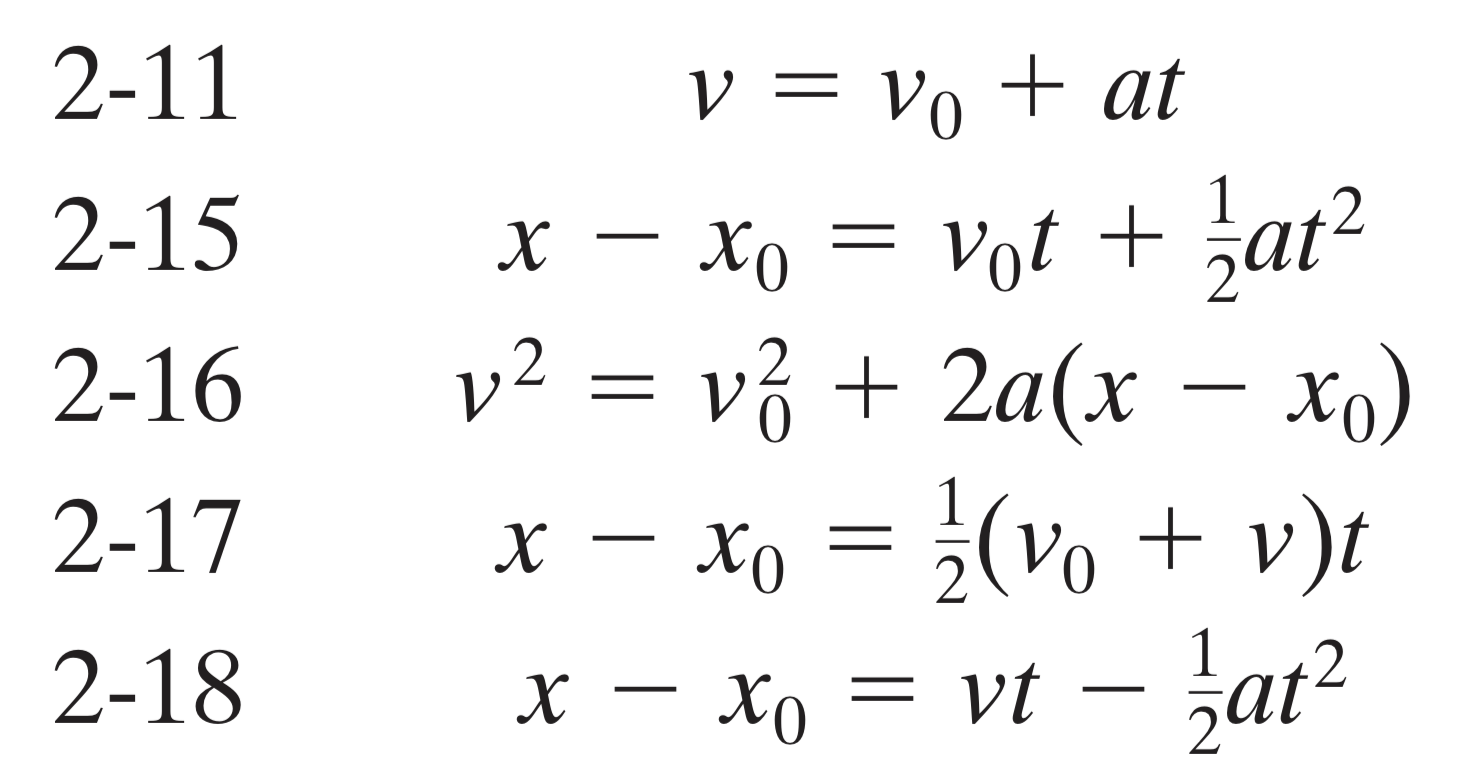
vector component: the eq.s of motion you studied in chapter 2 have a parallel here
H&R CH10 rotation
radians
H&R CH10 rotation
radians
H&R CH10 rotation
radians
H&R CH10 rotation
radians
H&R CH10 rotation
radians
H&R CH10 rotation
H&R CH10 rotation
H&R CH10 rotation
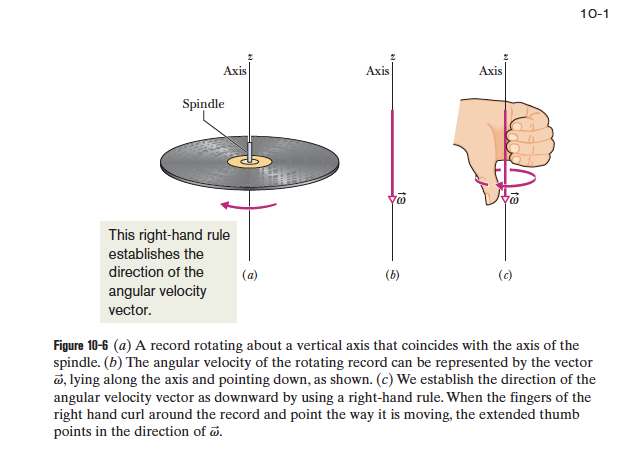
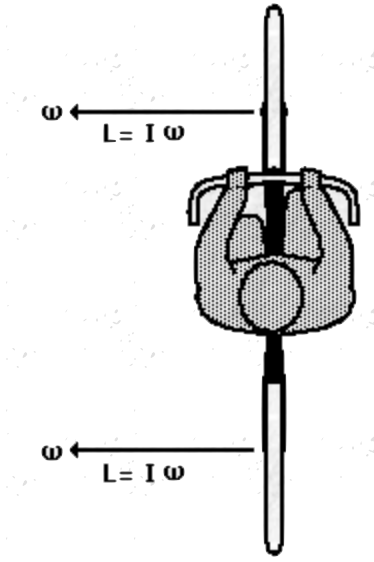
What is the direction of the rotational velocity vector when you ride a bike?
R
L
F
B
H&R CH10 rotation
H&R CH10 rotation
H&R CH10 rotation
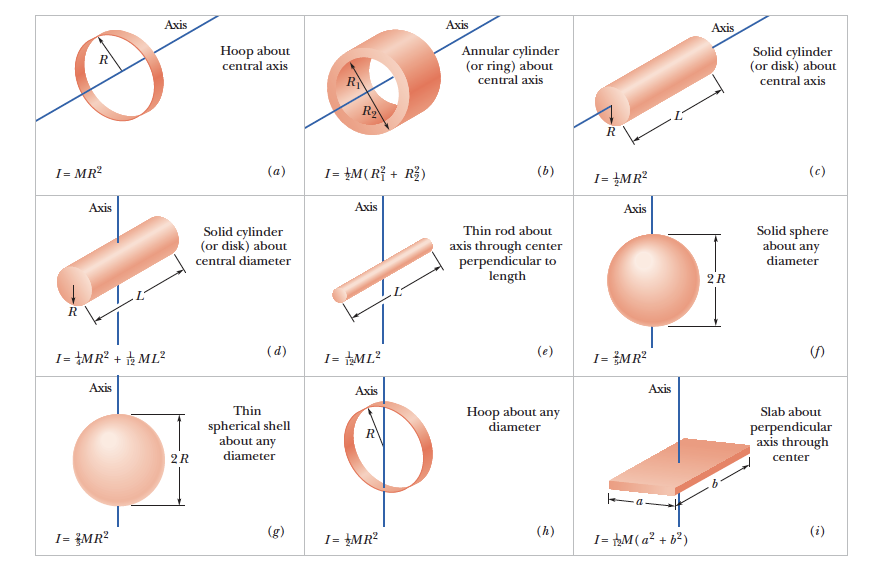
moment of inertia
H&R CH10 rotation
moment of inertia
system of particles
solid body
H&R CH10 rotation
moment of inertia
H&R CH10 rotation
moment of inertia
the CoM has v=0
H&R CH10 rotation
moment of inertia
H&R CH10 rotation
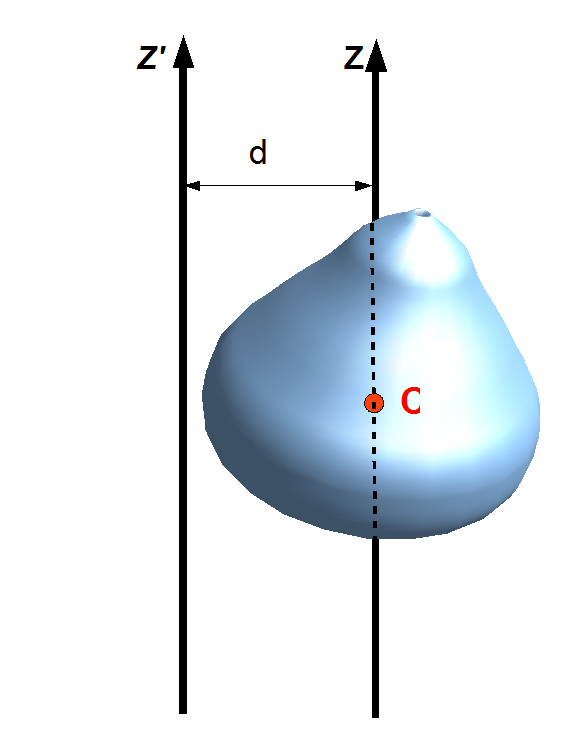
Parallel Axis Theorem
The moment of inertia of a body is equal to me moment of inertia of the body's center of mass rotation measured along an axis parallel to the axis of rotation, plus the product of the body's mass times the square distance between the axis of rotation and the axis of rotation that passes through the CoM.
H&R CH10 rotation
Parallel Axis Theorem
Let h be the distance between the axis of rotation and the axis parallel to the axis of rotation that goes through the CoM
distance: length of the perpendicular line that joins the two axes
h
Then the moment of inertia I is equal to
H&R CH9 CoM - momentum
moment of inertia
H&R CH9 CoM - momentum
moment of inertia
H&R CH9 CoM - momentum
moment of inertia
H&R CH9 CoM - momentum
moment of inertia
H&R CH9 CoM - momentum
moment of inertia
CoM coords = 0
H&R CH9 CoM - momentum
moment of inertia
H&R CH9 CoM - momentum
moment of inertia
=
+
H&R CH9 CoM - momentum
H&R CH9 CoM - momentum
H&R CH9 CoM - momentum
H&R CH9 CoM - momentum
H&R CH9 CoM - momentum
H&R CH9 CoM - momentum
CoM
h
CoM
h
H&R CH9 CoM - momentum
CoM
h
H&R CH9 CoM - momentum
H&R CH9 CoM - momentum
Torque is a turning or twisting action on a body about a rotation axis due to a force F
Torque is a turning or twisting action on a body about a rotation axis due to a force F
Torque is a turning or twisting action on a body about a rotation axis due to a force F
Torque is a turning or twisting action on a body about a rotation axis due to a force F
Torque is a turning or twisting action on a body about a rotation axis due to a force F
line of action
moment arm
Torque is a turning or twisting action on a body about a rotation axis due to a force F
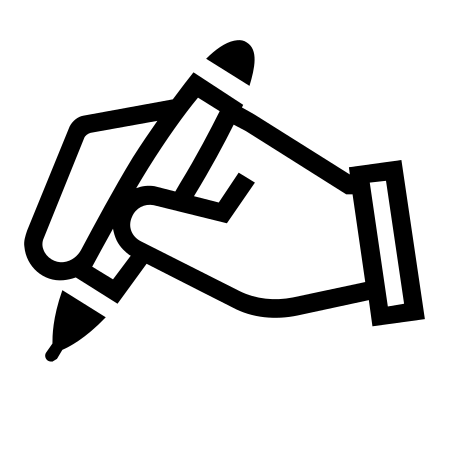
Case Study: Effect of Handrim Diameter on Performance in a Paralympic Wheelchair Athlete -Gabriel Brizuela Costa, et al. 2009
When greater torque is needed, however, [...] a larger diameter could be more effective. Guo et al., (2006) studied the effect of the diameter of the propulsion handrim (0.54 m, 0.43 m, and 0.32 m) on the propulsive moment generated [...] kinetic, potential, and total mechanical energy delivered [...] with the large handrims were significantly greater than with the small ones. Nevertheless the authors conclude that propelling the with the larger handrim size will have a greater metabolic cost.
Torque is a turning or twisting action on a body about a rotation axis due to a force F
particle of mass m at radius r
Torque is a turning or twisting action on a body about a rotation axis due to a force F
particle of mass m at radius r
Torque is a turning or twisting action on a body about a rotation axis due to a force F
particle of mass m at radius r
Remember:
For rotation
Remember:
For rotation
Remember:
For rotation
Remember:
For rotation
By federica bianco
rotation



