Zdalnie sterowany pojazd gąsienicowy
Remote-controlled tracked vehicle
Mariusz Kupidura
dr hab. Piotr Zawadzki
Założenia Projektowe
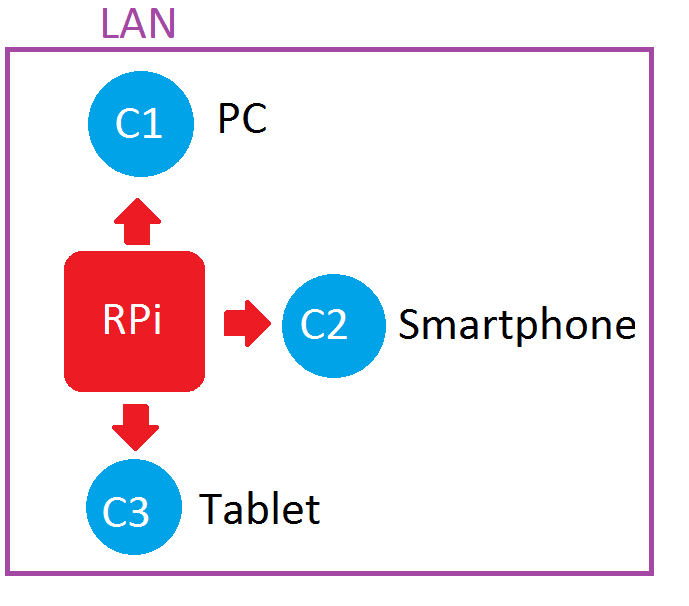
- Płyta główna urządzenia oparta o RaspberryPi, odpowiadająca za integracje poszczególnych modułów urządzenia oraz komunikacje z zdalnym klientem.
- Komunikacja z modułem sterującym w oparciu o kartę WiFi platformy RaspberryPi.
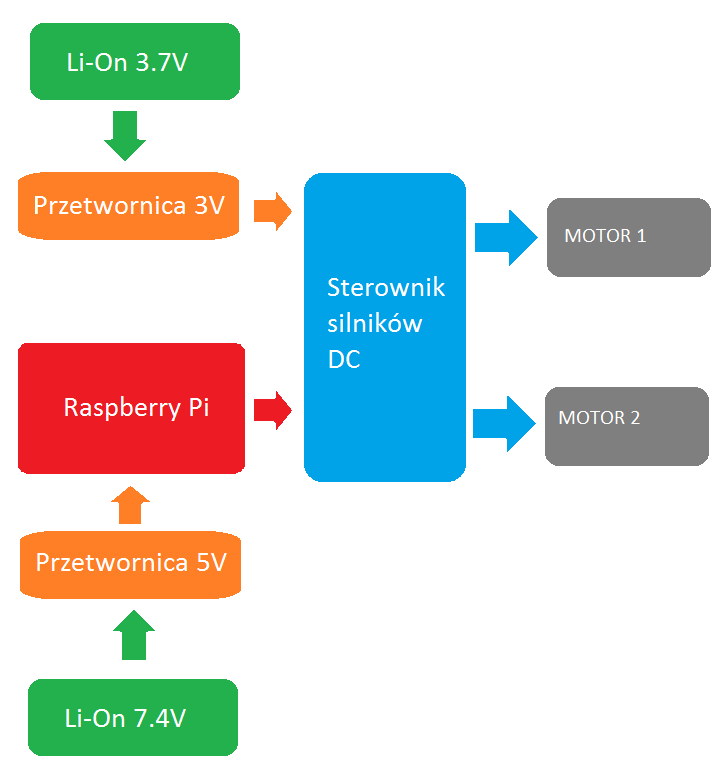
- Dedykowany układ zasilający
- Aplikacja webowa służąca do zdalnego sterowania robotem
Podwozie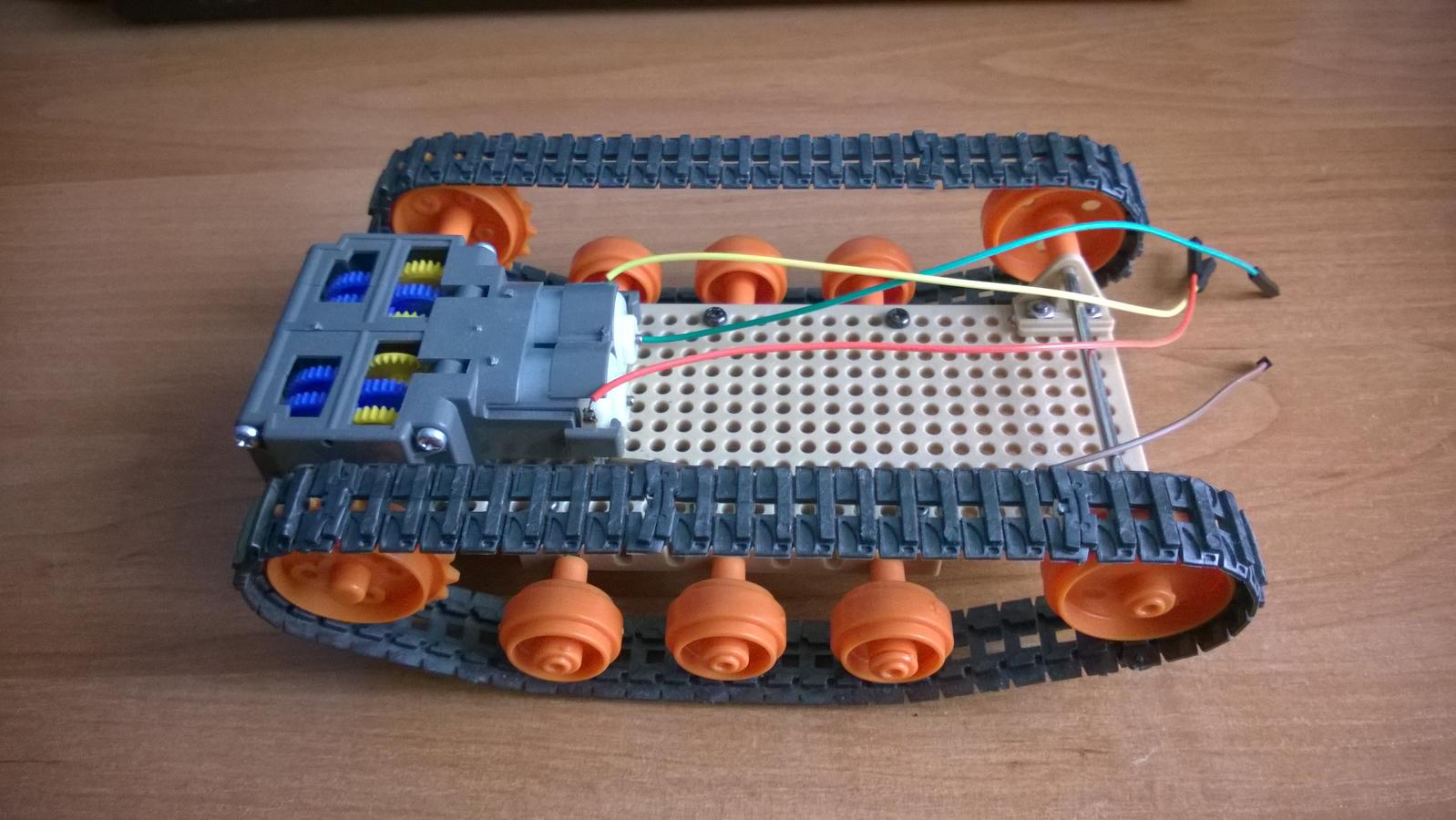
Schemat blokowy
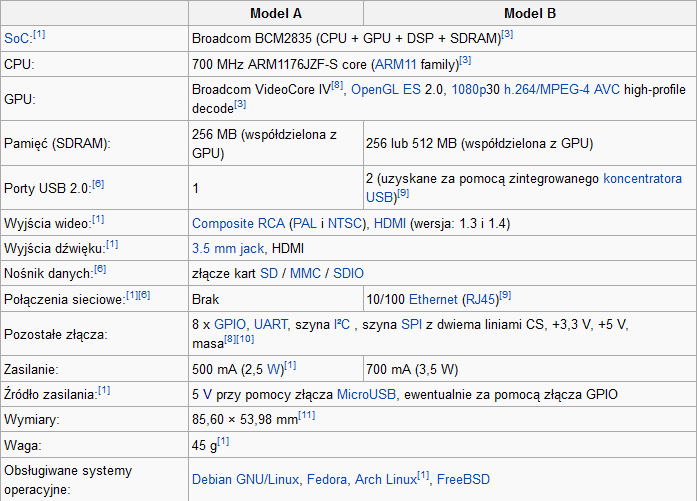
Raspberry Pi

Specyfikacja
RPi WiFi dongle
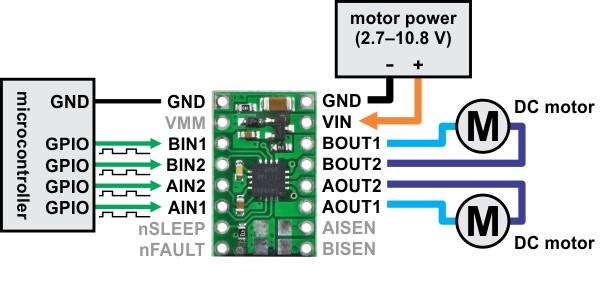
Sterownik silników DC
Schemat
Kontroler
- Aplikacja webowa
- Dostęp z każdego urządzenia
- Czysty HTML
- Websockets
Schemat sieci