Gabi

Paper Programs
?



Paper
Program
Whaaat?
1st.
2nd.
and so on....

Community
Interact
Learn
Have fun
A video with the activity from
?
?
?
?
?
?
?
?
So? How does it work?



Hardware components
A video camera/webcam to interpret the PP
A PC where the database and the server are living
A video projector which displays the result for the code that has been executed.


Write the code that should display something in the canvas context.
Generate and print the PP
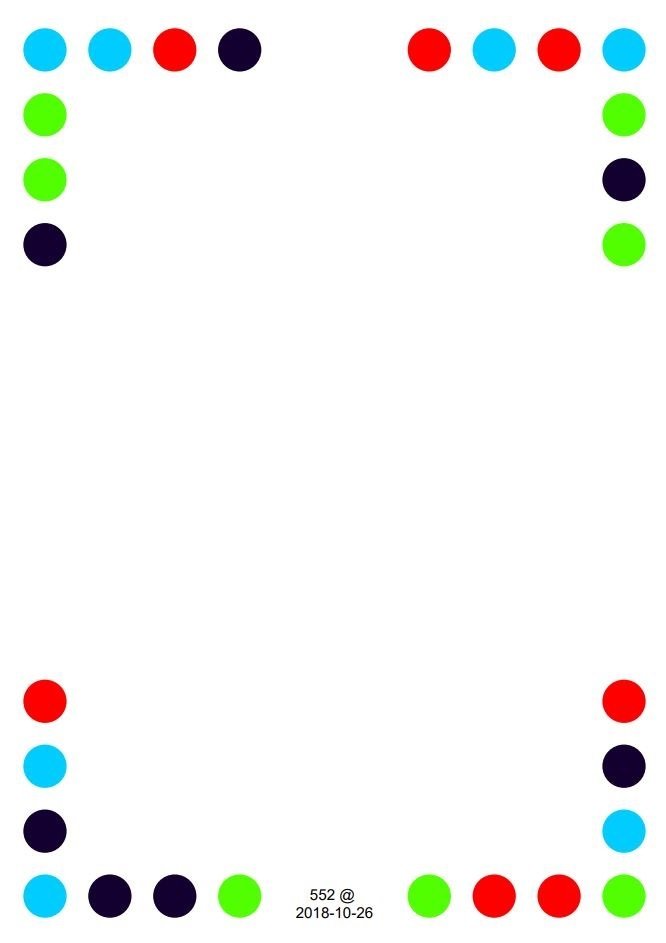
The camera will interpret the program by its bullets color and position



We see this:
But the camera sees this:

Context

4 points to set the context
//transform the X / Y position into pixel position of each calibration point
let knobPoints = [{x: 0, y: 0}, {x: 1, y: 0}, {x: 1, y: 1}, {x: 0, y: 1}].map(mapToKnobPointMatrix);
//results is Region Of Interest
let roi = cv.roi(knobPoints);
//then scanconst knotsPos = [
0: {x: 0.1722506054577151, y: 0.03212914963821511}
1: {x: 0.9818725844001396, y: 0.034954314912706196}
2: {x: 0.9908608620371012, y: 0.9261368735999805}
3: {x: 0.18352770381014225, y: 0.9009349188435258}
];const corners = [
{x: 0, y: 0} //TL
{x: 1, y: 0} //TR
{x: 1, y: 1} //BR
{x: 0, y: 1} //BL
];Context Points
ROI
//find contours
let contours = cv.findContours(knobToPoints);


//find contour Area
let contourArea = cv.contourArea(contour);
Contour
Image befor contour process
Image after contour process
//segment details in pixel units
{ x, y, width, height }//find contured segment area
let area = cv.arcLength(area);

/


Segment
Samples of segments that been selected
Segment data which we need to use later.
Filter Areas
Circularity
Color
const ratio = 4 * cv.CV_PI * area / (perimeter * perimeter);
if (ratio < minCircularity || ratio >= maxCircularity) continue;if (params.filterByColor) {
//check color from circle (1, 2, 3)
if (binImg.ucharAt(Math.round(center.loc.y), Math.round(center.loc.x)) != param.blobColor) {
continue;
}
}
We will process the areas in order to have only the areas that we need. These two are one of several filters that we need to detect colored bullets
Filtered dots

//find contours
let contour = cv.findContours(knobToPoints);
//find contured perimeter area
let area = cv.arcLength(area);
//Details
{ x, y, width, height }
let colorIndex = colorIndexForColor(keyPoint.avgColor, config.colorsRGB);

New dot context
2
3
0
1
Index the position of the color in an matrix based on 7 fields with 4 dimensions < > TL , TR , BL , BR
Detect the vector orientation

Codes based on indexes
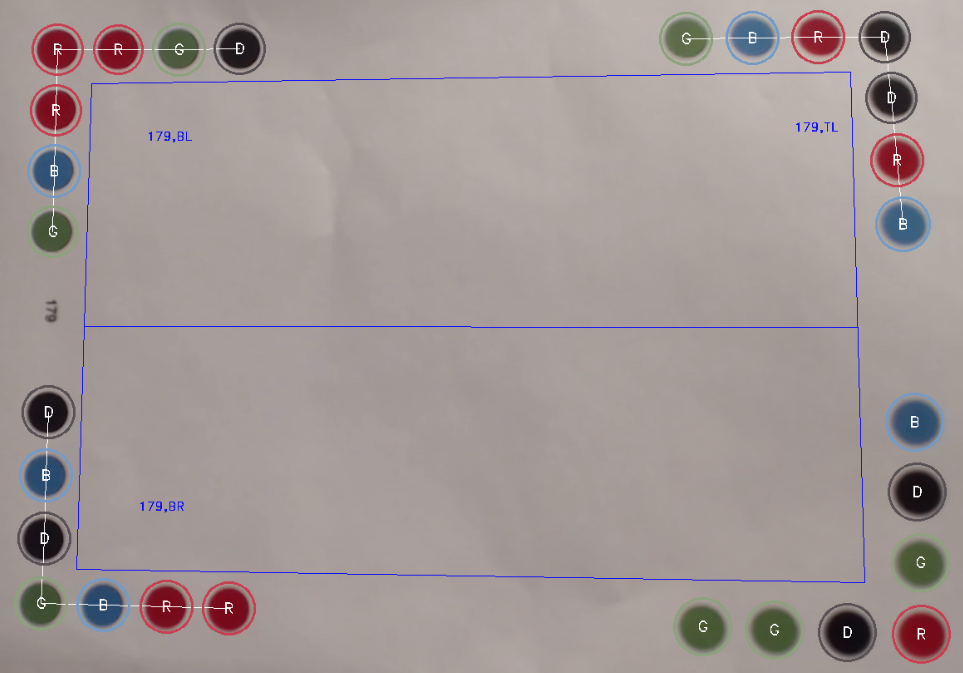
Program detected!!! (ID 179)
How program looks in the camera component
The program with ID 179 is detected
Program ID and position

Send to Projector
We get the program based on the ID and with the processed data it will be sent to the projector component
The program which we fetched from the DB and with the data that has been processed (position X/Y and width/height) we will tell the projector what, where and how big to render.

Projection
This is what it is rendered in the canvas

+
The program will be projected on the PP

Projection on a paper
The result

Resources
Detect circle 2nd way:
https://docs.opencv.org/2.4/doc/tutorials/imgproc/imgtrans/hough_circle/hough_circle.html
Detect contour: https://docs.opencv.org/2.4/doc/tutorials/imgproc/shapedescriptors/find_contours/find_contours.html
Detect color:
https://solarianprogrammer.com/2015/05/08/detect-red-circles-image-using-opencv/
Live App: https://paperprograms.org/
Github Repo: https://github.com/janpaul123/paperprograms
Community homepage: https://dynamicland.org/
Detect circle based on contour perimeter area: https://docs.opencv.org/3.1.0/dd/d49/tutorial_py_contour_features.html