Alimentador de mascota

Herramientas:
1.Utilizaremos un sensor de ultrasonidos TS601P01
2. Placa Arduino UNO:
3.Cables:
4.Cable USB
5.Protoboard:
6. Sensor de profundidad
7 Servomotor
8 Fuente de alimentación 7v - 12 v:
requisitos :
El sistema contendrá toda la información disponible y necesaria, para el alcance de los clientes, usuarios.
Proveer de un sistema de autónomo, funcional, pero a la vez simple, para que el usuario o cliente no necesite información especial para el manejo del sistema.
Inspecciones de validación de las entradas.
Respuestas a situaciones anormales, incluyendo facilidades de comunicación.
El sistema deberá estar operativo las 24 horas del día.
El sistema contará con todas las validaciones y restricciones posibles, medidas de seguridad en ciertos casos.
Sensor Ultrasonido
Objetivo:Sirve para medir distancias o superar obstáculos, entre otras posibles funciones...
Funcionalidad:
Esto consigue enviando un ultrasonido, a través de uno de la pareja de cilindros que compone el sensor, y espera a que dicho sonido rebote sobre un objeto y vuelva de retorno captado por el otro cilindro

¿Que recibimos en el sensor?
del ultrasonido


Conexiones
Programa
long distancia; long tiempo; void setup(){ Serial.begin(9600); pinMode(9, OUTPUT); /*activación del pin 9 como salida: para el pulso ultrasonido*/ pinMode(8, INPUT); /*activación del pin 8 como entrada: tiempo del rebote del ultrasonido*/ } void loop(){ digitalWrite(9,LOW); /* Por cuestión de estabilización del sensor*/ delayMicroseconds(5); digitalWrite(9, HIGH); /* envío del pulso ultrasonido*/ delayMicroseconds(10); tiempo=pulseIn(8, HIGH); /* Función para medir la longitud del pulso entrante. Mide el tiempo que transcurrido entre el envío del pulso ultrasónico y cuando el sensor recibe el rebote, es decir: desde que el pin 12 empieza a recibir el rebote, HIGH, hasta que deja de hacerlo, LOW, la longitud del pulso entrante*/ distancia= int(0.017*tiempo); /*fórmula para calcular la distancia obteniendo un valor entero*/ /*Monitorización en centímetros por el monitor serial*/ Serial.println("Distancia "); Serial.println(distancia); Serial.println(" cm"); delay(1000); }
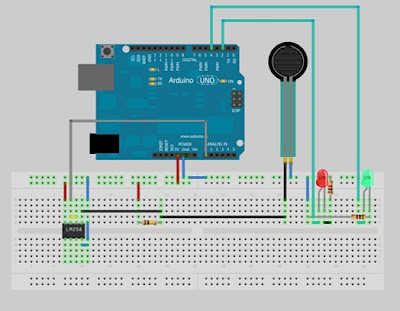
Sensor de PRESIÓN
Objetivo:
Medir el peso en onzas, utilizando una balanza física
funcionalidad:
A una mayor fuerza ejercida sobre el sensor ,menor sera la resistencia
CONEXIÓN
programa
2. Compara el valor con un valor equivalente a la des conexión del sensor
a. Si es afirmativo:
i. Enciende y apaga el led rojo
ii. lee el pin analógico
iii. Regresa a paso 2
b. Si es negativo:
i. Continua con programa
3. Repetir 5 veces
a. lee pin analógico
b. Compara en los distintos rangos definidos en la tabla para cada valor
i. Si es afirmativo
1. envía valor de onzas
ii. Si es negativo
1. continua el programa
c. Retardo 500 milisegundos
d. Vuelve a paso 3, hasta cumplir condición
4. Compara el valor del pin analógico
a. Si el valor no excede el rango de lectura normal
i. Led verde = ON
ii. Led rojo = OFF
b. Si el valor excede el rango de lectura normal
i. Led verde = OFF
ii. Led rojo = ON
5. Fin de comparación
6. Reestablece variable
7. Retardo de 1.5 segundos
8. Regresa a paso 1