Adaptación de vehículos aéreos no tripulados para Sensado remoto de cultivos.
CONTENIDO
- INTRODUCCIÓN
- PLANTEAMIENTO DEL PROBLEMA Y JUSTIFICACIÓN
- OBJETIVOS
- ESTADO DEL ARTE
- METODOLOGÍA
- RESULTADOS
- BIBLIOGRAFÍA
introducción




PLANTEAMIENTO y JUSTIFICACIÓN del problema







objetivo general
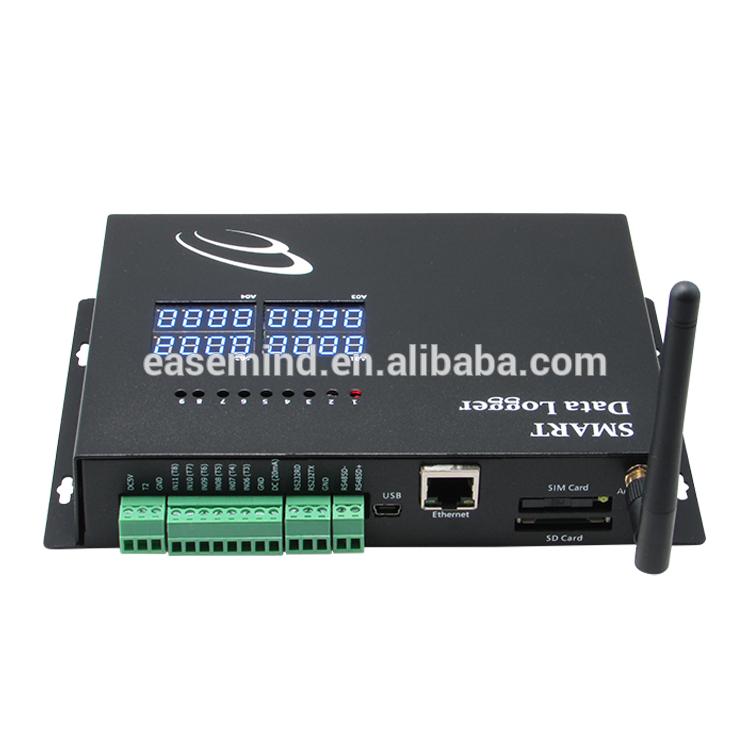
Desarrollo de un sistema de sensado remoto con vehículos aéreos no tripulados y equipados con medidores especializados de bajo costo, lo que permitirá mejorar la toma de decisiones por parte del agricultor colombiano.
objetivos especificos
-
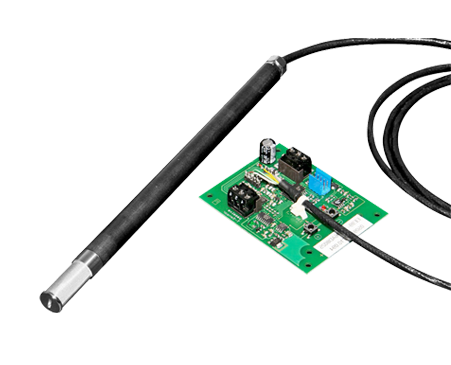
Ensamblar un robot con medidores que permitan el sensado de cultivos implementando algoritmos que garanticen la obtención de una estadística confiable.
-
implantar algoritmos de vuelo autónomo utilizando comando AT compatibles con las capacidades y características del dron multirrotor, que permita realizar el muestreo sobre cultivos.
-
Desarrollar una interfaz de captura, almacenamiento y procesamiento de la información obtenida a través de los sensores de intensidad de radiación solar, humedad, presión atmosférica , altitud y temperatura en las diferentes zonas de estudio en tiempo real y modo offline
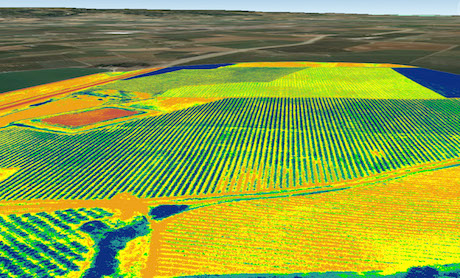
estado del arte

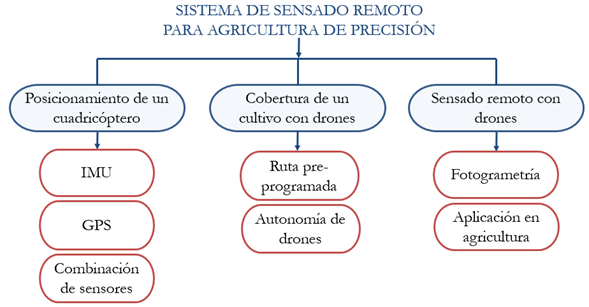
Fuente: Propia
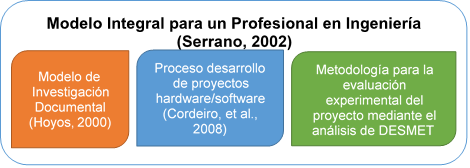
METODOLOGIA
resultados esperados
Se espera la construcción de dispositivo electrónico con hardware e interacción de software open source que permita el sensado de cultivos agrícolas para obtener información detallada del crecimiento, deterioro y evolución del cultivo, sin intervención directa al alcance de pequeños y medianos agricultores.


REFERENCIAS BIBLIOGRÁFICAS
Al Saeed, I. (2011). Importance of Emerging Technologies in Society for Futuring & Innovation. Journal of Applied Global Research, 12–22.
Albaker, B. M., & Rahim, N. A. (2009). A survey of collision avoidance approaches for unmanned aerial vehicles. In 2009 International Conference for Technical Postgraduates (TECHPOS) (pp. 1–7). IEEE. https://doi.org/10.1109/TECHPOS.2009.5412074
Bongiovanni, R., & Lowenberg-Deboer, J. (2004). Precision agriculture and sustainability. Precision Agriculture, 359-387.
Brutto, M. L., Borruso, A., & D'Argenio, A. (2012). UAV systems for photogrammetric data acquisition of archaeological sites. International Journal of Heritage in the Digital Era, 1, 7-14.
Coetzee, L., & Eksteen, J. (2011). The Internet of Things - promise for the future? An introduction. In IST-Africa Conference Proceedings. IEEE.
Chen, G., & Kotz, D. (2000). A Survey of Context-Aware Mobile Computing Research. Time, 3755(TR2000-381), 1–16. https://doi.org/10.1.1.140.3131
Cordeiro, L., Mar, C., Valentin, E., Cruz, F., Patrick, D., Barreto, R., & Lucena, V. (2008). An agile development methodology applied to embedded control software under stringent hardware constraints. ACM SIGSOFT Software Engineering Notes, 5.