Utilization of Trimble Mobile Scanning in Malaysia
Mobile Scanning Systems


MX1 Mobile Imaging Scanner
MX8 Laser Scanner
MX1 Mobile Imaging Scanner
Map Updating Evolution




1996
1998
2001
2007
2013
Digitize paper maps
DGPS units & base stations
Nationwide digital map completion
Navigation data update
Imaging Scanner

Navigation Data Update
| Paper Map | •Surveyor provided with printed map and sent to site •Unable to verify due to no image proof |
| Video Survey | •Surveyor provided with video cam & GPS logger •Requires manual focusing of video cam |
| DIY Street View | •Vehicle equipped with DIY Street View systems •No real time GNSS correction •Doesn’t support photogrammetry |





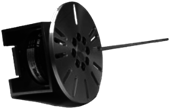



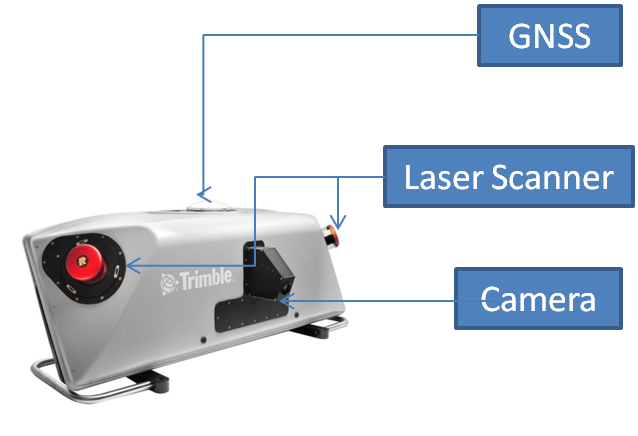
Trimble MX1
Ladybug 5 camera
Inertial Measurement Unit (IMU)
Distance Measurement Instrument (DMI)
In vehicle server
Control Terminal
GNSS Receiver

Components
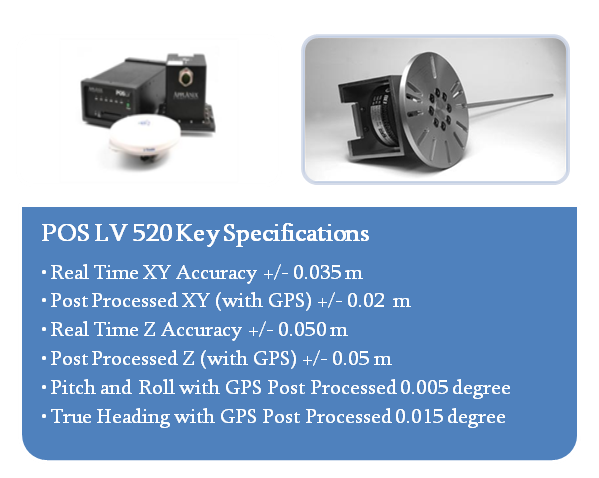
POS LV 220
Real Time XY Accuracy +/- 0.30 m
Post Processed XY (with GPS) +/- 0.02 m
Real Time Z Accuracy +/- 0.50 m
Post Processed Z (with GPS) +/- 0.05 m
DGPS (OmniStar) capable
Ladybug5
30 Megapixel camera (6 x 5 MP)
Able to cover 90% of a full sphere
5 Gbit/s USB 3.0 interface
Rugged computer system
Intel Xeon 2.3 Ghz
16 GB Memory
64-bit system
Windows 7
Purposes

Navigation information update

POI/Address update


Road features
Workflow
Preparation
- Decide area
- Prepare map
- Plan routes
Survey
- Initialization
- Data collection
Post processing
- GPS correction
- Feature extraction

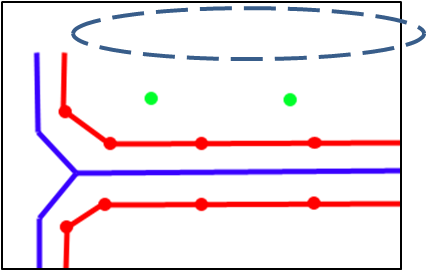
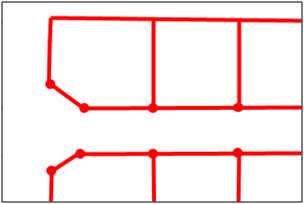
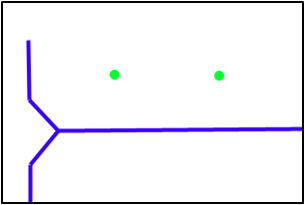
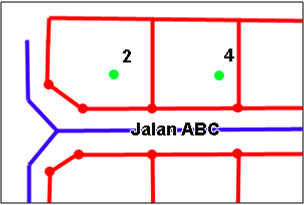
Feature Extraction


1st Point
2nd Point
XYZ Value
Move 1 step forward
Feature Extraction


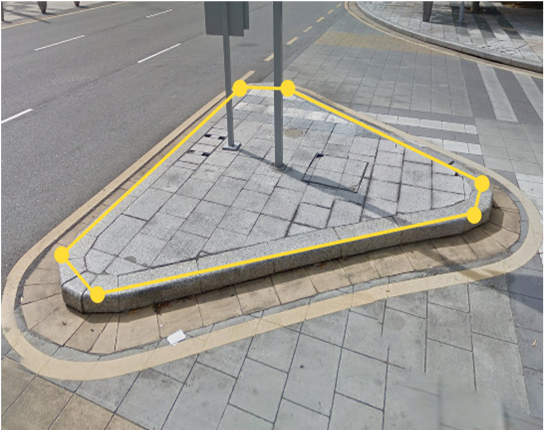

Point
Polygon
Measure
Line
Stratergy
Focus
Schedule
Progress
•New commercial area
•Non-updated in map
•High population density
•2 Operators
•8 a.m. – 5 p.m.
•No survey during rain & after dark
•Since December 2013
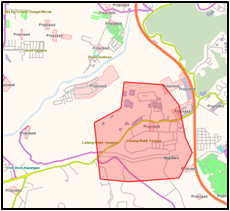
•10,000 km around Klang Valley
*as of 2015
Limitation - Basemap Update

| Survey | Plot | Export | Update |
MX1 + UX5



Survey
Extract
Export
Update
Survey
Extract
Export


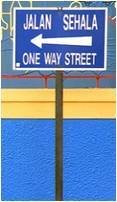
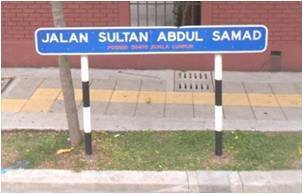
Sample Panoramic Images
MX8 Laser Scanner
Mobile LiDAR Acquisition
Requirements
1000 km distance
Kuala Lumpur & Putrajaya
±10 cm accuracy
RGB Colored LAS output




Distance Measurement Instrument (DMI)
In vehicle server
Control Terminal
GNSS Receiver
MX8 Pod
Components


Planning
Workflow
GCP Placement
MLS Survey
Post Processing
QAQC
Delivery
Plan survey route
Plan target locations
Ground control point placement & survey


Daily survey 7 a.m. – 5 p.m.
Survey data copied into external

GPS correction
Point cloud registration & process output

Visual checking on processed output

Copy into hard drives
| Traffic Conditions | •Go out as early as 6 a.m. •End before 5 p.m. •Survey city centers during weekends & holidays |
| Weather Conditions | •No survey during rain & after rain •Drive 60 km/h on highways to avoid overheating, 40 km/h on normal roads •10 minute stops every 20 minutes survey if overheat |
| Processing Large Data | •~60 projects to be completed process within 5 months •Each project takes about 2-3 days for end to end process •6 personnel working 24/7 shift using 6 Trident Imaging Hub |
Challenges & Strategies
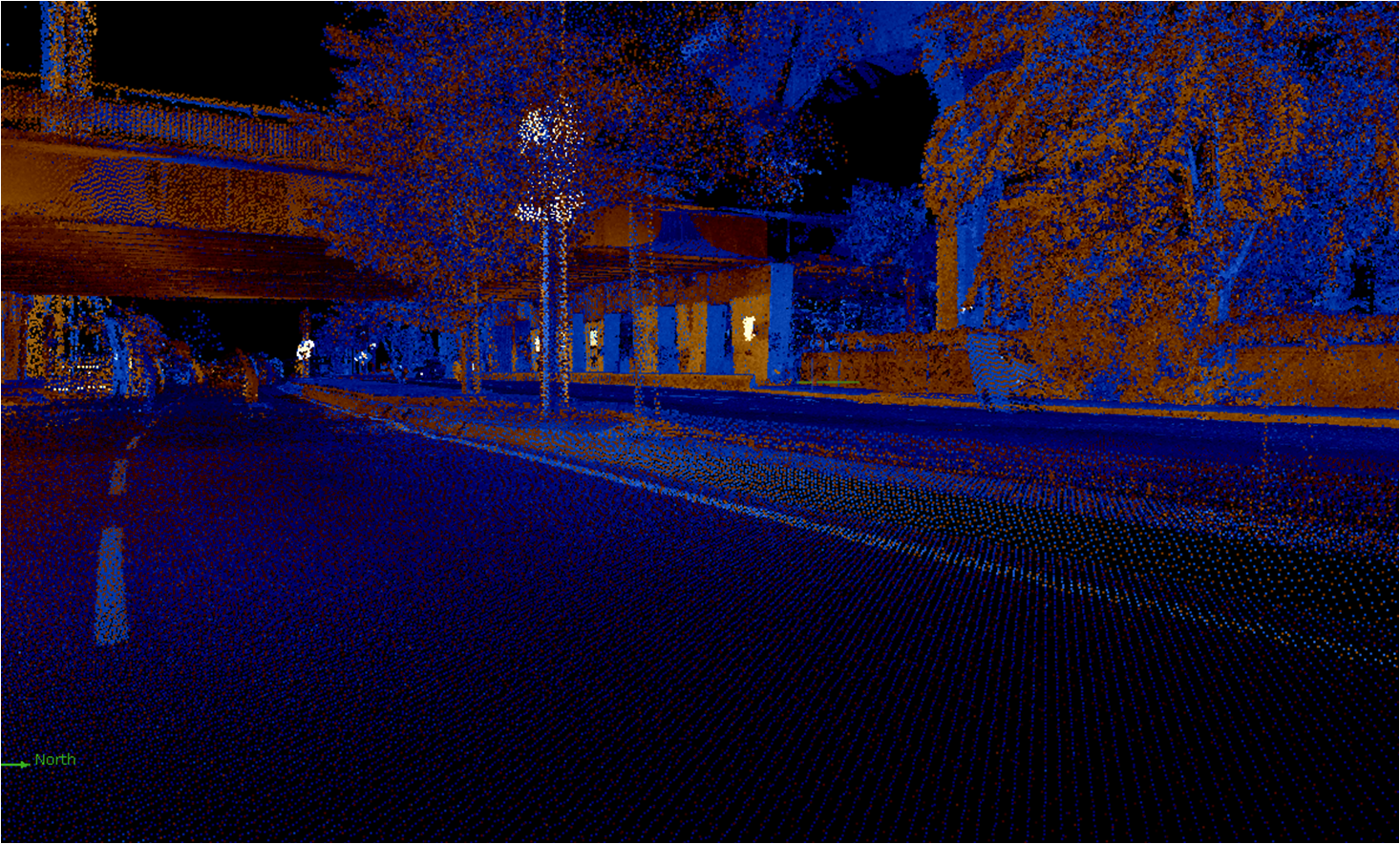
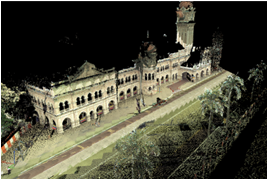
Sample Point Cloud

Sample Point Cloud
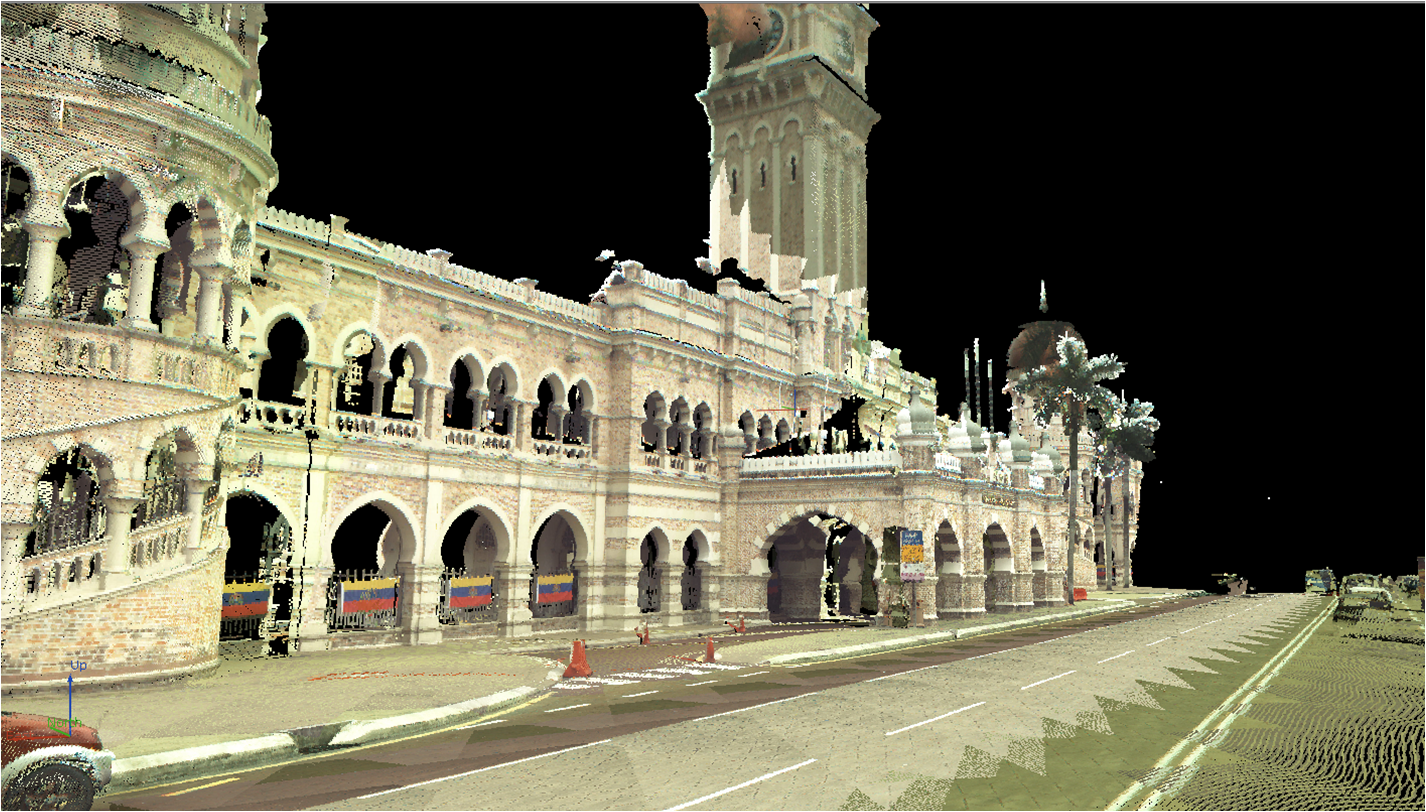
Sample Point Cloud

Sample Point Cloud
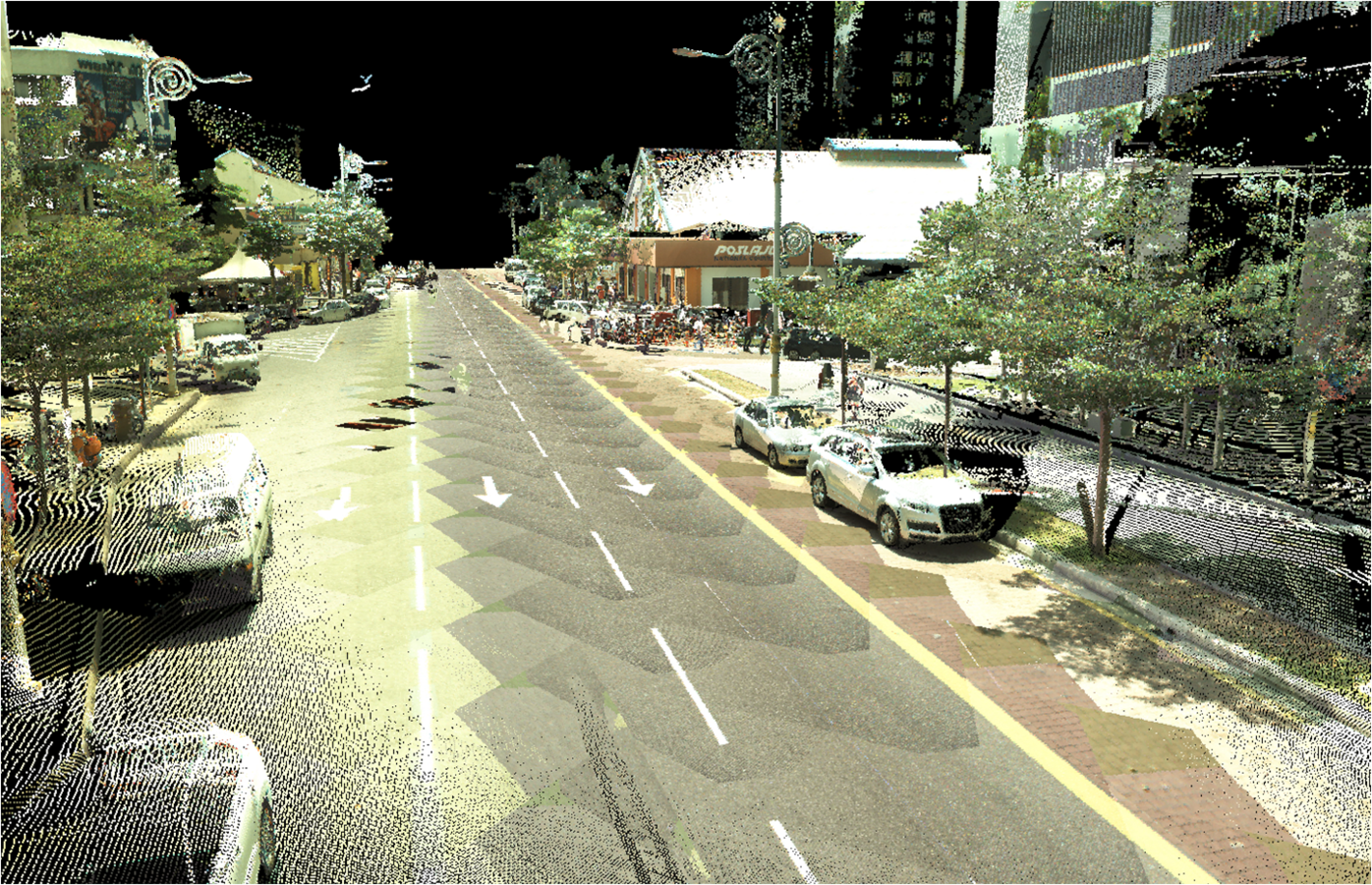
Sample Point Cloud
Summary
| MX 1 | MX 8 | |
|---|---|---|
| Purpose | High quality 360° image capturing | High precision laser point cloud capturing |
| Feature Extraction | - Photogrammetry - up to 50cm accuracy |
- Point cloud extraction - up to 1cm accuracy |
| Automatic Extraction | N/A | Possible using eCognition |
| Possible Products | 360° street view image |
- RGB colored LAS - 3D model |