Neural Network Final Project Report
Team member list:
- 410485044-賴政諺
- 410585038-鄭弘詣
Package introduction
Main Package

Other Packages

The algorithm:faster-rcnn

DR. Ross Girshick
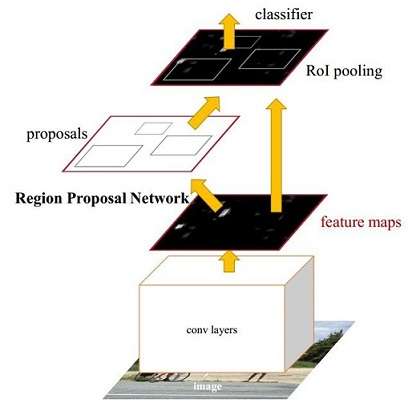
Basic conv+ReLU+pooling layer extract the feature maps of an image.
- It passes through "Softmax" to determine whether anchors are positive or negative.
- Use the bounding box regression to fix the anchors in order to get the precise proposals
Collects the input of the feature maps and proposals. Combines those messages and extract the proposal feature maps
Calculate the class of the proposal by the proposal feature maps, and use the bounding box regression again to get the final precise point.
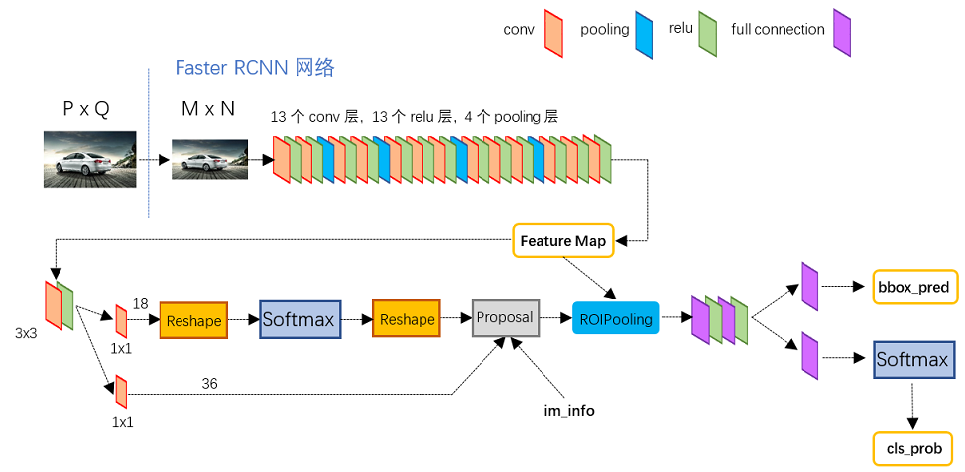
The python version of the faster RCNN test's internet structure
Output Result
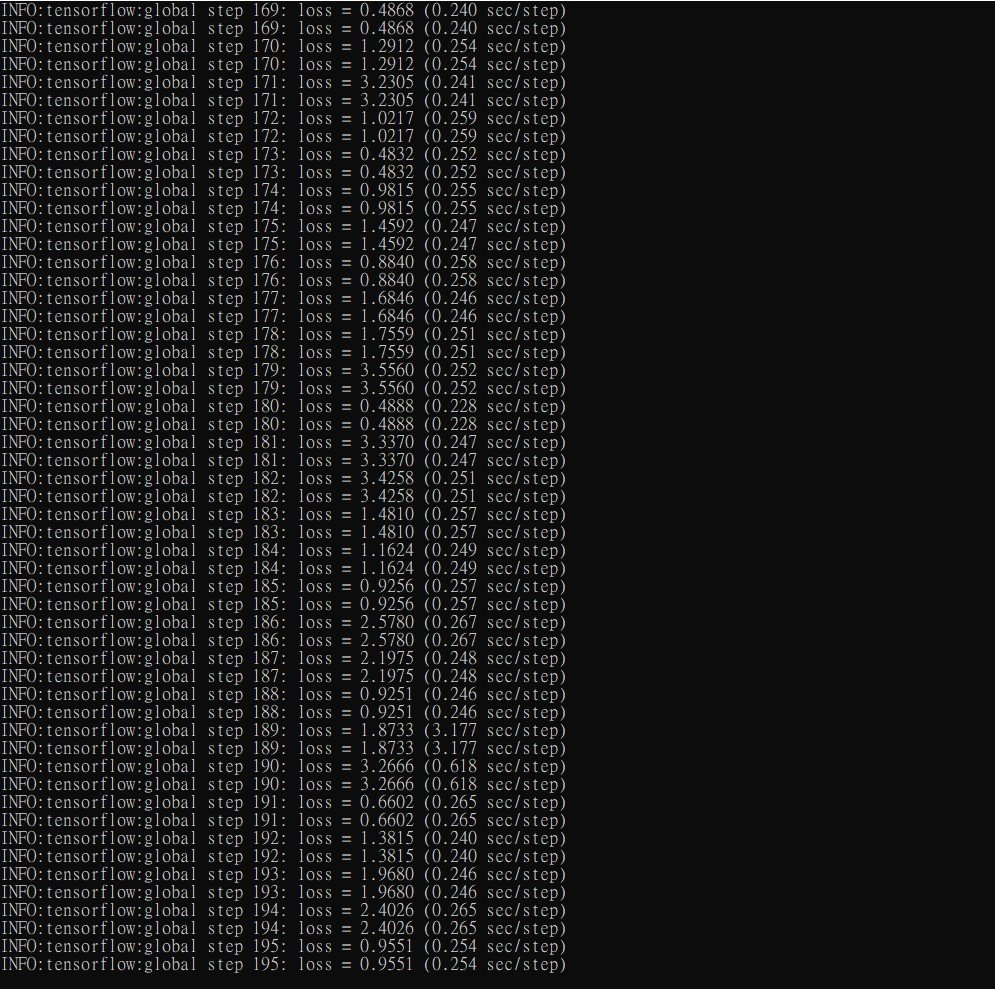

Tensor board-Loss collections
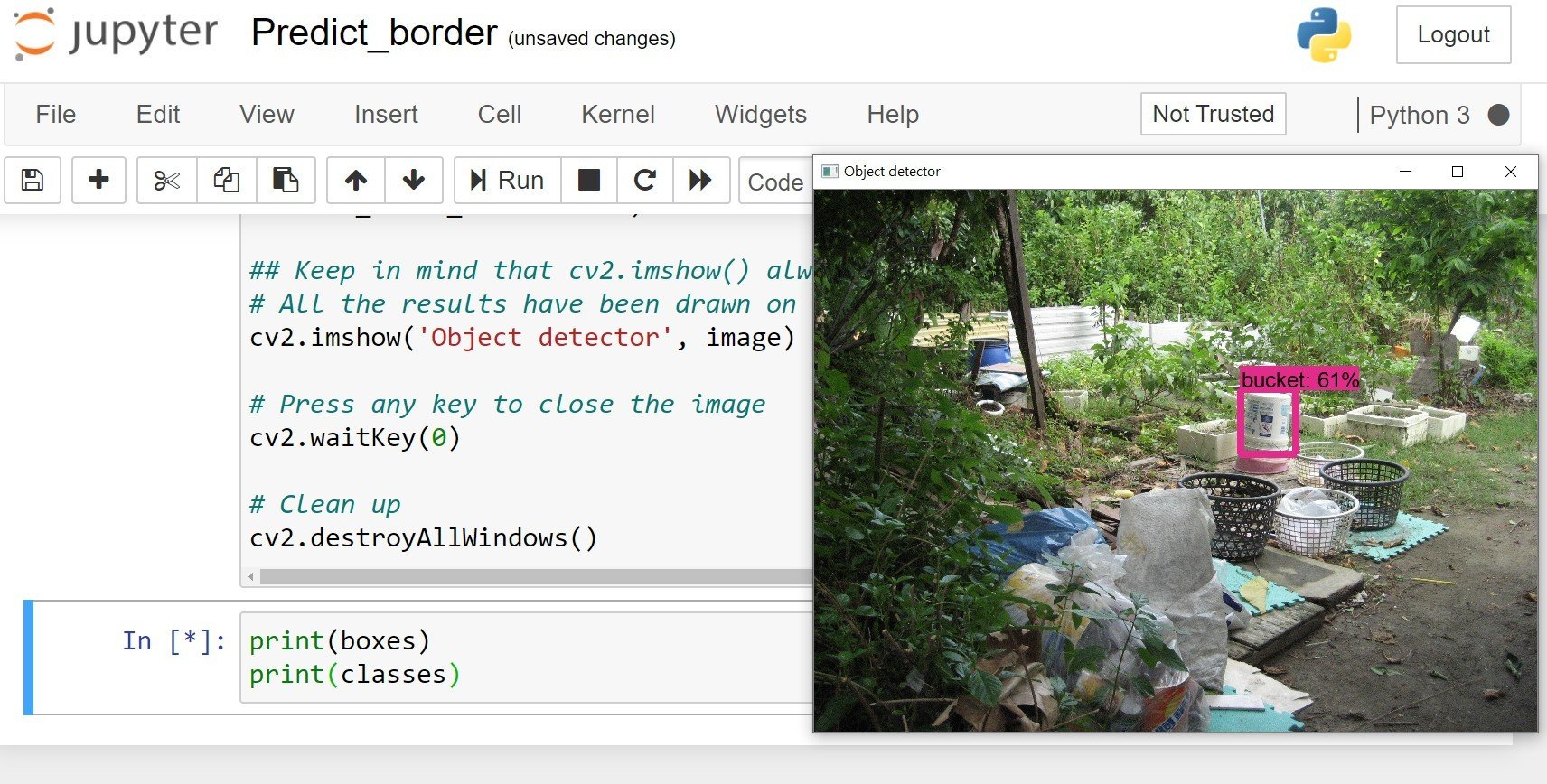
Recognition Rate