Introduction to Digital Manufacturing
Introduction to Digital Manufacturing
Aadharsh Aadhithya - CB.EN.U4AIE20001
Anirudh Edpuganti - CB.EN.U4AIE20005
Madhav Kishor - CB.EN.U4AIE20033
Onteddu Chaitanya Reddy - CB.EN.U4AIE20045
Pillalamarri Akshaya - CB.EN.U4AIE20049
Team-1
Introduction to Digital Manufacturing
Question 1
Bolts are mechanical fastners having a hexagonal head and a cylindrical shaft groovedhelically using a profile named the thread profile. Nuts on the other hand have complimentary helical grooves on their inner surfaces

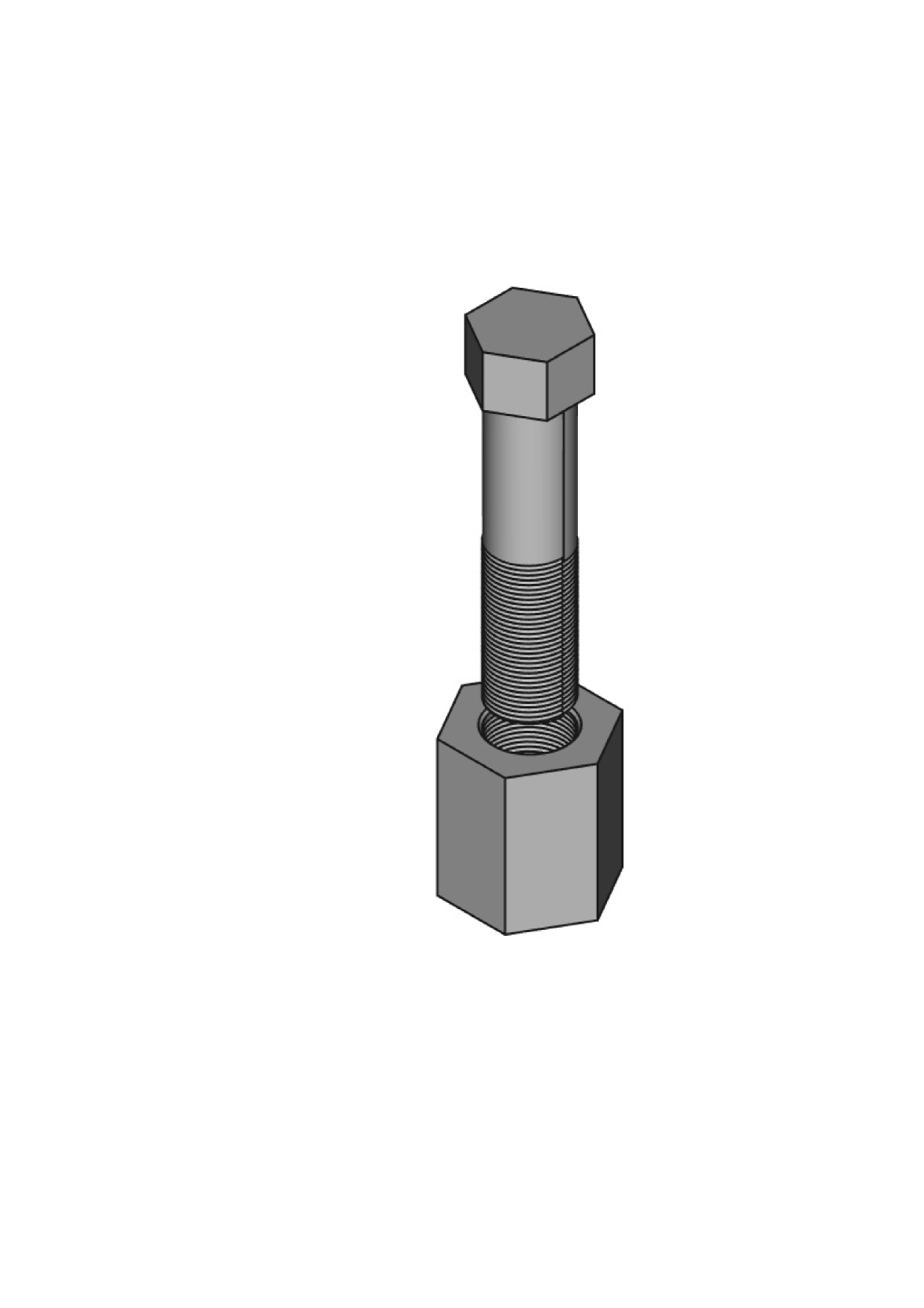
Slicing

Introduction to Digital Manufacturing
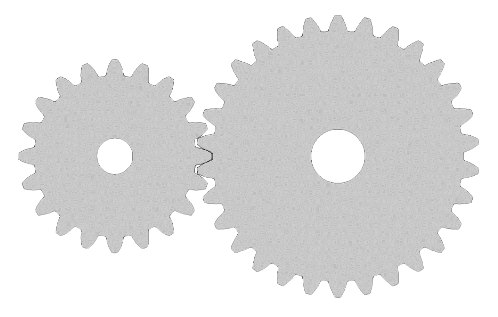
Question 2
Model and slice two gears perfectly meshing with each other as given below.
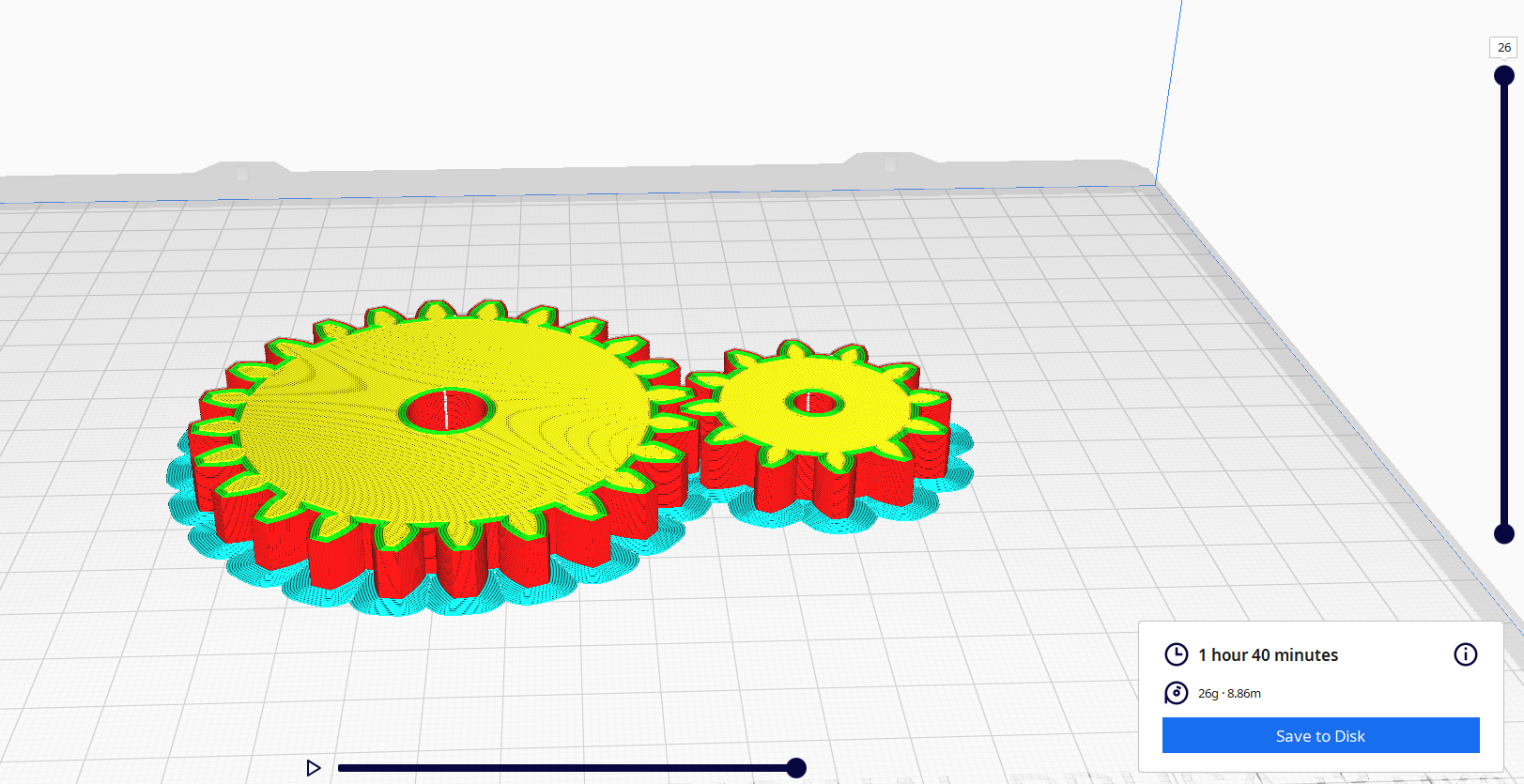
Slicing
Introduction to Digital Manufacturing
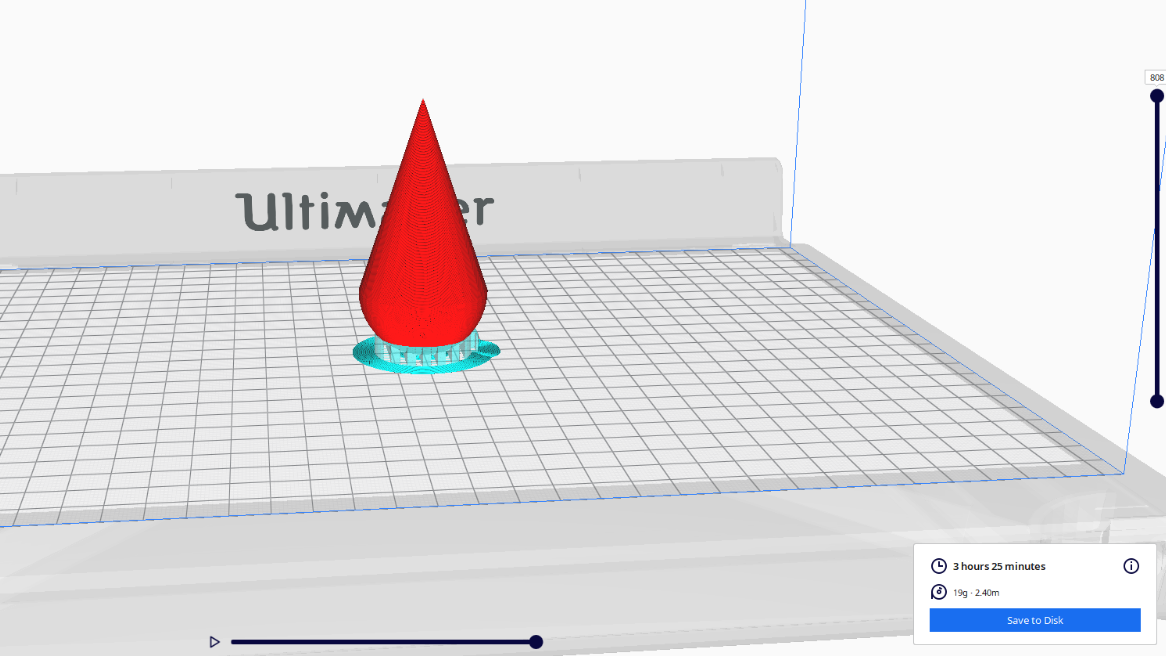
Design a Roly-Poly toy. Strategise the modeling and slicing off a rolly poly toy that can be 3D printed. The team should be able to justify that the final 3D printed toy would behave similarly to to the roly-poly tows available in the market
Question 3
Introduction to Digital Manufacturing
Introduction to Digital Manufacturing
Introduction to Digital Manufacturing
Introduction to Digital Manufacturing
z
Introduction to Digital Manufacturing
z
Introduction to Digital Manufacturing
z
Introduction to Digital Manufacturing
z
Depends on the Geometry and Distribution of mass about these axes
Introduction to Digital Manufacturing
z
Suppose the Body is Symmetric about z axis , then Center of mass has no component perpendicular to z axis
Introduction to Digital Manufacturing
z
Suppose the Body is Symmetric about z axis , then Center of mass has no component perpendicular to z axis
Center of Mass is along z axis (0,0,z)
Introduction to Digital Manufacturing
z
z
Introduction to Digital Manufacturing
z
Let us Focus on the lower part
Let us Focus on the lower part
Suppose the Lower Part is a Paraboloid
Project the Paraboloid onto z-x plane, and we will get the figure shown beside
Introduction to Digital Manufacturing
z
Introduction to Digital Manufacturing
z
x
Introduction to Digital Manufacturing
z
x
Introduction to Digital Manufacturing
z
x
Introduction to Digital Manufacturing
z
x
Introduction to Digital Manufacturing
z
x
z
x
Introduction to Digital Manufacturing
z
x
Further, This can be Generalised to any geometry
For the Roly-Poly Toy to be in "Stable-Equlibrium", Its Center of Mass should be as low as possible
Further, For an extensive study, it is possible to model the equilibrium of the toy using second-order differential equations with constant coeffitients
Slicing
THANK YOU SIR!