He Wang
hewang@ucas.ac.cn
University of Chinese Academy of Sciences (UCAS)
on behalf of KAGRA collaboration
Nature Conferences: "AI for Discovery and Research Automation" on 17th October 2025

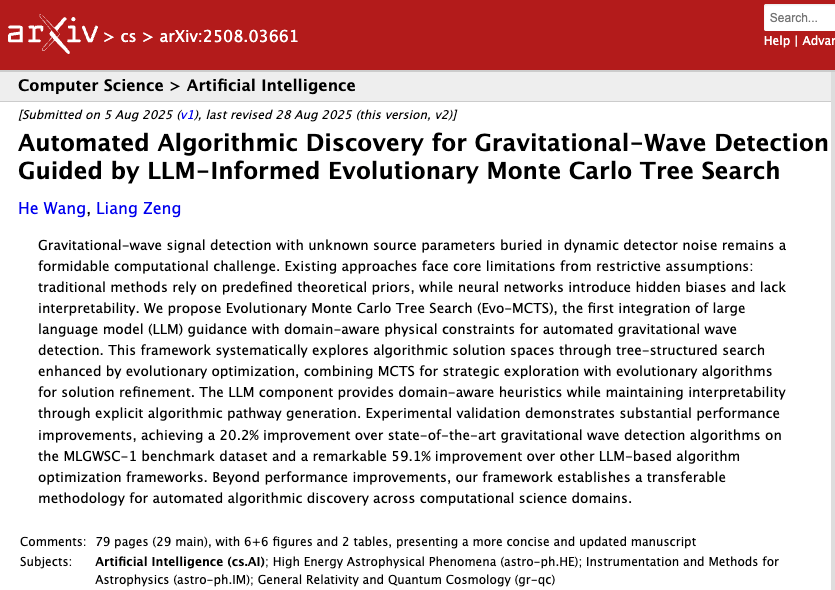
Based on arXiv:2508.03661
LLM-Guided Evolutionary Monte Carlo Tree Search for Explainable Algorithm Discovery in Gravitational-Wave Detection

动机1:传统方法严重依赖人工经验构造滤波器与统计量
动机2:AI 可解释性挑战: Discoveries vs. Validation
hewang@ucas.ac.cn
Motivation I: Rely on Experience for Filters and Statistics
AAD for GW detection Guided by LLM-informed Evo-MCTS
Linear Filter
Input Series
Output Series
Impulse Response:
Digital Signal Processing Approach
Nitz et al., ApJ (2017)
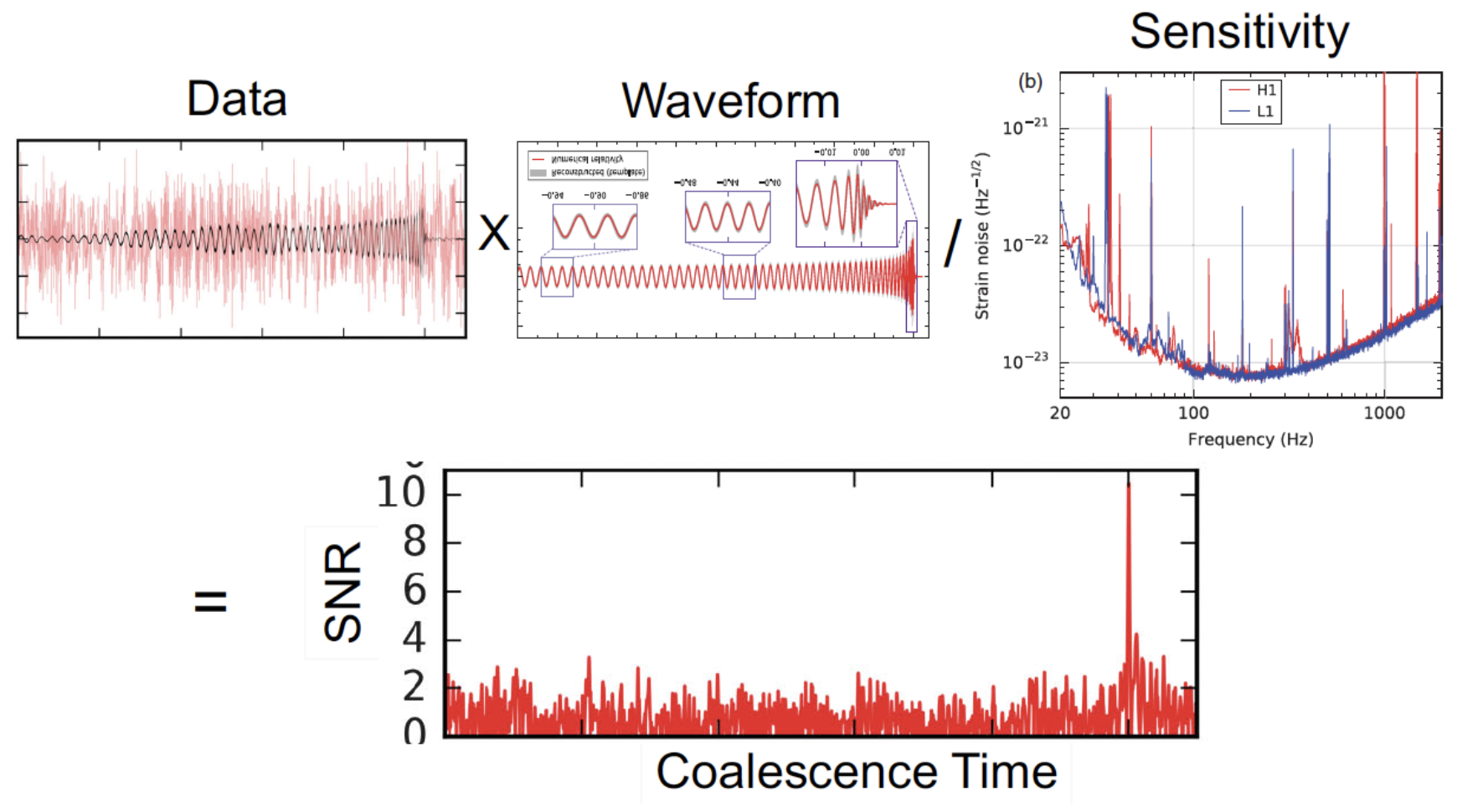
Matched Filtering Techniques
-
In Gaussian and stationary noise environments, the optimal linear algorithm for extracting weak signals
- Works by correlating a known signal model \(h(t)\) (template) with the data.
- Starting with data: \(d(t) = h(t) + n(t)\).
- Defining the matched-filtering SNR \(\rho(t)\):
\(\rho^2(t)\equiv\frac{1}{\langle h|h \rangle}|\langle d|h \rangle(t)|^2 \) , where
\(\langle d|h \rangle (t) = 4\int^\infty_0\frac{\tilde{d}(f)\tilde{h}^*(f)}{S_n(f)}e^{2\pi ift}df \) ,
\(\langle h|h \rangle = 4\int^\infty_0\frac{\tilde{h}(f)\tilde{h}^*(f)}{S_n(f)}df \),
\(S_n(f)\) is noise power spectral density (one-sided).
Statistical Approaches
Frequentist Testing:
- Make assumptions about signal and noise
- Write down the likelihood function
- Maximize parameters
- Define detection statistic
→ recover MF
Bayesian Testing:
- Start from same likelihood
- Define parameter priors
- Marginalize over parameters
- Often treated as Frequentist statistic
→ recover MF (for certain priors)
hewang@ucas.ac.cn
AAD for GW detection Guided by LLM-informed Evo-MCTS
Motivation I: Linear template method using prior data
- Traditional matching filters need large templates, increasing computational costs and noise sensitivity, which hampers new gravitational wave signal detection.
Motivation II: Black-box data-driven learning methods
- Deep neural networks excel in nonlinear modeling but are "black boxes" with poor interpretability, making them unsuitable for high-risk scientific validation.
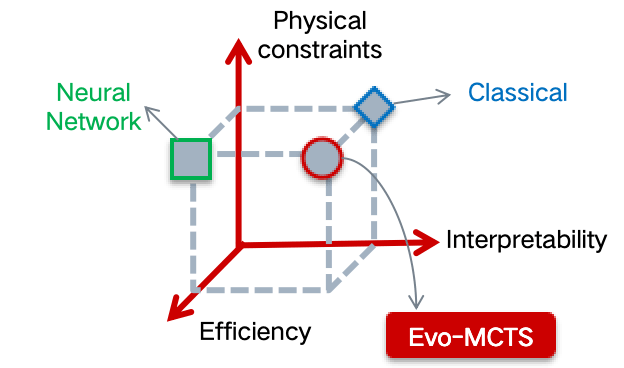
The strict requirements for algorithm discovery
- Physical constraints: Must follow physical laws and domain knowledge
- Efficiency: Must navigate large, costly search spaces
- Interpretability: Must be understandable and verifiable by experts
Large Language Models (LLMs) as Designers
- LLMs are used in Automated Algorithmic Discovery (AAD) to directly create algorithms or specific components, which are commonly incorporated iteratively to continuously search for better designs.
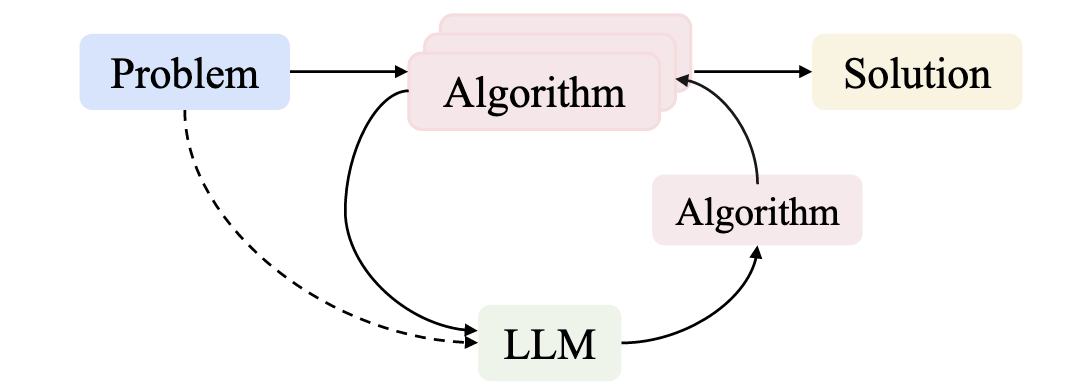
external_knowledge
(constraint)
Fitness
Challenges and Motivations
Motivation II: AI Interpretability Challenges: Discoveries vs. Validation
hewang@ucas.ac.cn
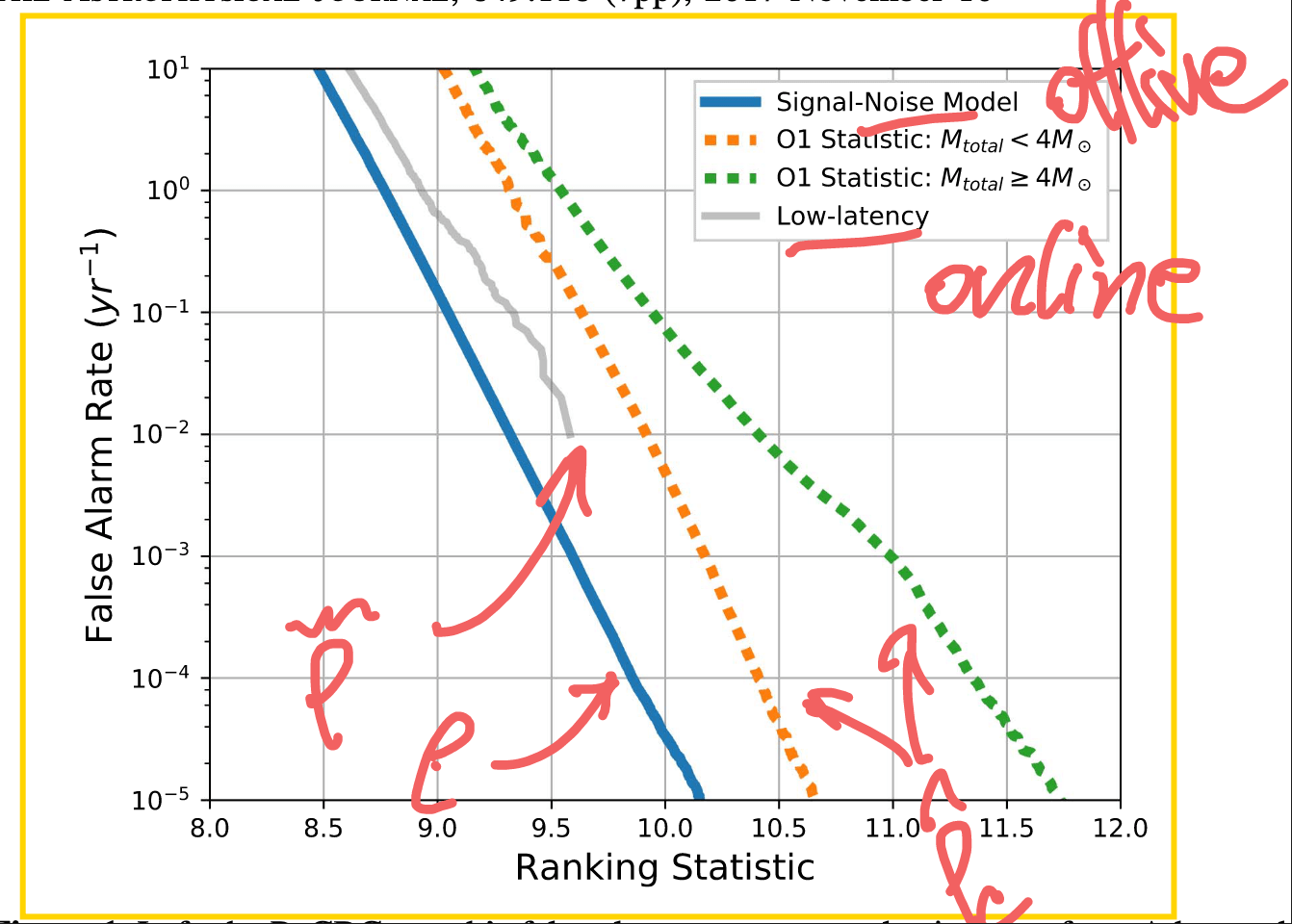
Detection statistics from our AI model showing O1 events
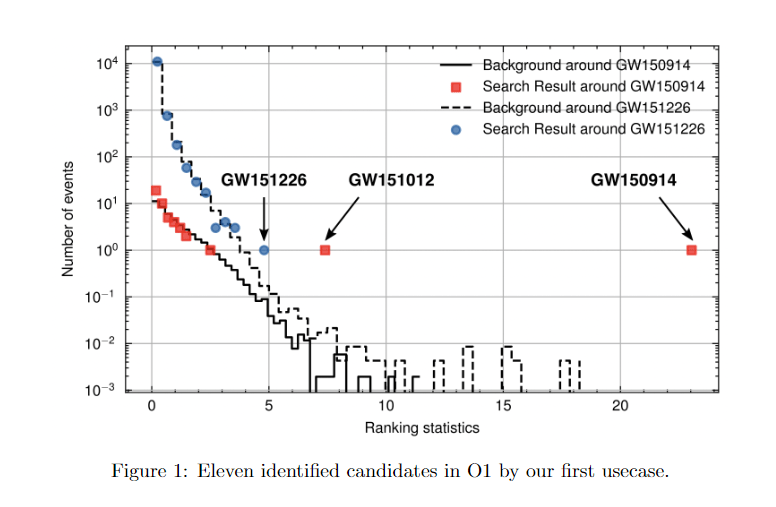
HW et al 2024 MLST 5 015046
GW151226
GW151012
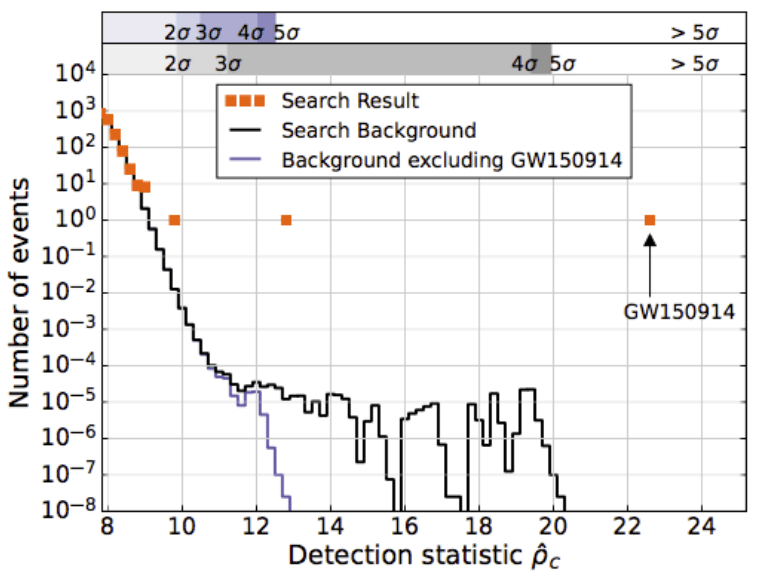
LVK. PRD (2016). arXiv:1602.03839
Sci4MLGW@ICERM (June 2025)
GW Search & Parameter Estimation Challenges with AI Models:
- Convincing the scientific community of the pipeline's validity and the statistical significance of new discoveries remains difficult despite the model's ability to identify potential gravitational wave signals.
- In parameter estimation, AI models' lack of interpretability requires substantial additional scientific validation to ensure credibility and acceptance of results.
- Results from AI models often lack robustness across different noise realizations and are difficult to calibrate against established methods.
- Scientific papers using AI methods must dedicate significant space to validation procedures, comparing against traditional methods and demonstrating reliability across multiple test cases.
AAD for GW detection Guided by LLM-informed Evo-MCTS
Why Do We Trust Traditional Models?
Key Trust Factors:
- ✓ Interpretable: Parameters have physical meaning
- ✓ Built-in uncertainties: Input uncertainties propagate to outputs
- ✓ Model selection: Balance simplicity with accuracy
- ✓ Scientific insight: Reduces complexity, reveals principles
Traditional Physics Approach
Input
Human-Designed Algorithm
(Based on human insight)
Output
Example: Matched Filtering,
Linear Regression
Black-Box AI Approach
Input
AI Model
(Low interpretability)
Output
Examples: CNN, AlphaGo, DINGO
Key Challenge: How can we maintain the interpretability advantages of traditional models while leveraging the power of AI approaches?
Data/
Experience
Data/
Experience
hewang@ucas.ac.cn
AAD for GW detection Guided by LLM-informed Evo-MCTS
Bridging Trust & Performance in GW Analysis
Combining the interpretability of physics with the power of AI
Our Mission: To create transparent AI systems that combine physics-based interpretability with deep learning capabilities
Interpretable AI Approach
The best of both worlds
Input
Physics-Informed
Algorithm
(High interpretability)
Output
Example: Our Approach
(Evo-MCTS)
AI Model
Physics
Knowledge
Traditional Physics Approach
Input
Human-Designed Algorithm
(Based on human insight)
Output
Example: Matched Filtering, linear regression
Black-Box AI Approach
Input
AI Model
(Low interpretability)
Output
Examples: CNN, AlphaGo, DINGO
Data/
Experience
Data/
Experience
🎯 OUR WORK
hewang@ucas.ac.cn
AAD for GW detection Guided by LLM-informed Evo-MCTS
Automated Heuristic Design: Problem Definition
For any complex task \(P\) (especially NP-hard problems), Automated Heuristic Design (AHD) searches for the optimal heuristic \(h^*\) within a heuristic space \(H\):
\(h^*=\underset{h \in H}{\arg \max } g(h) \)
The heuristic space \(H\) contains all feasible algorithmic solutions for task \(P\). Each heuristic \(h \in H\) maps from the set of task inputs \(I_P\) to corresponding solutions \(S_P\):
\(h: I_P \rightarrow S_P\)
Performance measure \(g(\cdot)\) evaluates each heuristic's effectiveness, \(g: H \rightarrow \mathbb{R}\). For minimization problems with objective function \(f: S_P \rightarrow \mathbb{R}\), we estimate performance by evaluating the heuristic instances \({ins}\in D \subseteq I_P\) on dataset \(D\) as follows:
\(g(h)=\mathbb{E}_{\boldsymbol{ins} \in D}[-f(h(\boldsymbol{ins}))]\)
arXiv.2410.14716
external_knowledge
(constraint)
HW & ZL, arXiv:2508.03661
hewang@ucas.ac.cn
AAD for GW detection Guided by LLM-informed Evo-MCTS
import numpy as np
import scipy.signal as signal
def pipeline_v1(strain_h1: np.ndarray, strain_l1: np.ndarray, times: np.ndarray) -> tuple[np.ndarray, np.ndarray, np.ndarray]:
def data_conditioning(strain_h1: np.ndarray, strain_l1: np.ndarray, times: np.ndarray) -> tuple[np.ndarray, np.ndarray, np.ndarray]:
window_length = 4096
dt = times[1] - times[0]
fs = 1.0 / dt
def whiten_strain(strain):
strain_zeromean = strain - np.mean(strain)
freqs, psd = signal.welch(strain_zeromean, fs=fs, nperseg=window_length,
window='hann', noverlap=window_length//2)
smoothed_psd = np.convolve(psd, np.ones(32) / 32, mode='same')
smoothed_psd = np.maximum(smoothed_psd, np.finfo(float).tiny)
white_fft = np.fft.rfft(strain_zeromean) / np.sqrt(np.interp(np.fft.rfftfreq(len(strain_zeromean), d=dt), freqs, smoothed_psd))
return np.fft.irfft(white_fft)
whitened_h1 = whiten_strain(strain_h1)
whitened_l1 = whiten_strain(strain_l1)
return whitened_h1, whitened_l1, times
def compute_metric_series(h1_data: np.ndarray, l1_data: np.ndarray, time_series: np.ndarray) -> tuple[np.ndarray, np.ndarray]:
fs = 1 / (time_series[1] - time_series[0])
f_h1, t_h1, Sxx_h1 = signal.spectrogram(h1_data, fs=fs, nperseg=256, noverlap=128, mode='magnitude', detrend=False)
f_l1, t_l1, Sxx_l1 = signal.spectrogram(l1_data, fs=fs, nperseg=256, noverlap=128, mode='magnitude', detrend=False)
tf_metric = np.mean((Sxx_h1**2 + Sxx_l1**2) / 2, axis=0)
gps_mid_time = time_series[0] + (time_series[-1] - time_series[0]) / 2
metric_times = gps_mid_time + (t_h1 - t_h1[-1] / 2)
return tf_metric, metric_times
def calculate_statistics(tf_metric, t_h1):
background_level = np.median(tf_metric)
peaks, _ = signal.find_peaks(tf_metric, height=background_level * 1.0, distance=2, prominence=background_level * 0.3)
peak_times = t_h1[peaks]
peak_heights = tf_metric[peaks]
peak_deltat = np.full(len(peak_times), 10.0) # Fixed uncertainty value
return peak_times, peak_heights, peak_deltat
whitened_h1, whitened_l1, data_times = data_conditioning(strain_h1, strain_l1, times)
tf_metric, metric_times = compute_metric_series(whitened_h1, whitened_l1, data_times)
peak_times, peak_heights, peak_deltat = calculate_statistics(tf_metric, metric_times)
return peak_times, peak_heights, peak_deltat
Input: H1 and L1 detector strains, time array | Output: Event times, significance values, and time uncertainties
external_knowledge
(constraint)



Optimization Target: Maximizing Area Under Curve (AUC) in the 1-1000Hz false alarms per-year range, balancing detection sensitivity and false alarm rates across algorithm generations
Automated Heuristic Design: Problem Definition
HW & ZL, arXiv:2508.03661
MLGWSC-1 benchmark
Problem: Pipeline Workflow
- Conditions raw detector data (whitening)
- Computes time-frequency metrics
- Identifies peaks above background
- Returns event candidates with timestamps
AAD for GW detection Guided by LLM-informed Evo-MCTS
import numpy as np
import scipy.signal as signal
def pipeline_v1(strain_h1: np.ndarray, strain_l1: np.ndarray, times: np.ndarray) -> tuple[np.ndarray, np.ndarray, np.ndarray]:
def data_conditioning(strain_h1: np.ndarray, strain_l1: np.ndarray, times: np.ndarray) -> tuple[np.ndarray, np.ndarray, np.ndarray]:
window_length = 4096
dt = times[1] - times[0]
fs = 1.0 / dt
def whiten_strain(strain):
strain_zeromean = strain - np.mean(strain)
freqs, psd = signal.welch(strain_zeromean, fs=fs, nperseg=window_length,
window='hann', noverlap=window_length//2)
smoothed_psd = np.convolve(psd, np.ones(32) / 32, mode='same')
smoothed_psd = np.maximum(smoothed_psd, np.finfo(float).tiny)
white_fft = np.fft.rfft(strain_zeromean) / np.sqrt(np.interp(np.fft.rfftfreq(len(strain_zeromean), d=dt), freqs, smoothed_psd))
return np.fft.irfft(white_fft)
whitened_h1 = whiten_strain(strain_h1)
whitened_l1 = whiten_strain(strain_l1)
return whitened_h1, whitened_l1, times
def compute_metric_series(h1_data: np.ndarray, l1_data: np.ndarray, time_series: np.ndarray) -> tuple[np.ndarray, np.ndarray]:
fs = 1 / (time_series[1] - time_series[0])
f_h1, t_h1, Sxx_h1 = signal.spectrogram(h1_data, fs=fs, nperseg=256, noverlap=128, mode='magnitude', detrend=False)
f_l1, t_l1, Sxx_l1 = signal.spectrogram(l1_data, fs=fs, nperseg=256, noverlap=128, mode='magnitude', detrend=False)
tf_metric = np.mean((Sxx_h1**2 + Sxx_l1**2) / 2, axis=0)
gps_mid_time = time_series[0] + (time_series[-1] - time_series[0]) / 2
metric_times = gps_mid_time + (t_h1 - t_h1[-1] / 2)
return tf_metric, metric_times
def calculate_statistics(tf_metric, t_h1):
background_level = np.median(tf_metric)
peaks, _ = signal.find_peaks(tf_metric, height=background_level * 1.0, distance=2, prominence=background_level * 0.3)
peak_times = t_h1[peaks]
peak_heights = tf_metric[peaks]
peak_deltat = np.full(len(peak_times), 10.0) # Fixed uncertainty value
return peak_times, peak_heights, peak_deltat
whitened_h1, whitened_l1, data_times = data_conditioning(strain_h1, strain_l1, times)
tf_metric, metric_times = compute_metric_series(whitened_h1, whitened_l1, data_times)
peak_times, peak_heights, peak_deltat = calculate_statistics(tf_metric, metric_times)
return peak_times, peak_heights, peak_deltat
Input: H1 and L1 detector strains, time array | Output: Event times, significance values, and time uncertainties
Automated Heuristic Design: Problem Definition
HW & ZL, arXiv:2508.03661
AAD for GW detection Guided by LLM-informed Evo-MCTS
import numpy as np
import scipy.signal as signal
from scipy.signal.windows import tukey
from scipy.signal import savgol_filter
def pipeline_v2(strain_h1: np.ndarray, strain_l1: np.ndarray, times: np.ndarray) -> tuple[np.ndarray, np.ndarray, np.ndarray]:
"""
The pipeline function processes gravitational wave data from the H1 and L1 detectors to identify potential gravitational wave signals.
It takes strain_h1 and strain_l1 numpy arrays containing detector data, and times array with corresponding time points.
The function returns a tuple of three numpy arrays: peak_times containing GPS times of identified events,
peak_heights with significance values of each peak, and peak_deltat showing time window uncertainty for each peak.
"""
eps = np.finfo(float).tiny
dt = times[1] - times[0]
fs = 1.0 / dt
# Base spectrogram parameters
base_nperseg = 256
base_noverlap = base_nperseg // 2
medfilt_kernel = 101 # odd kernel size for robust detrending
uncertainty_window = 5 # half-window for local timing uncertainty
# -------------------- Stage 1: Robust Baseline Detrending --------------------
# Remove long-term trends using a median filter for each channel.
detrended_h1 = strain_h1 - signal.medfilt(strain_h1, kernel_size=medfilt_kernel)
detrended_l1 = strain_l1 - signal.medfilt(strain_l1, kernel_size=medfilt_kernel)
# -------------------- Stage 2: Adaptive Whitening with Enhanced PSD Smoothing --------------------
def adaptive_whitening(strain: np.ndarray) -> np.ndarray:
# Center the signal.
centered = strain - np.mean(strain)
n_samples = len(centered)
# Adaptive window length: between 5 and 30 seconds
win_length_sec = np.clip(n_samples / fs / 20, 5, 30)
nperseg_adapt = int(win_length_sec * fs)
nperseg_adapt = max(10, min(nperseg_adapt, n_samples))
# Create a Tukey window with 75% overlap.
tukey_alpha = 0.25
win = tukey(nperseg_adapt, alpha=tukey_alpha)
noverlap_adapt = int(nperseg_adapt * 0.75)
if noverlap_adapt >= nperseg_adapt:
noverlap_adapt = nperseg_adapt - 1
# Estimate the power spectral density (PSD) using Welch's method.
freqs, psd = signal.welch(centered, fs=fs, nperseg=nperseg_adapt,
noverlap=noverlap_adapt, window=win, detrend='constant')
psd = np.maximum(psd, eps)
# Compute relative differences for PSD stationarity measure.
diff_arr = np.abs(np.diff(psd)) / (psd[:-1] + eps)
# Smooth the derivative with a moving average.
if len(diff_arr) >= 3:
smooth_diff = np.convolve(diff_arr, np.ones(3)/3, mode='same')
else:
smooth_diff = diff_arr
# Exponential smoothing (Kalman-like) with adaptive alpha using PSD stationarity.
smoothed_psd = np.copy(psd)
for i in range(1, len(psd)):
# Adaptive smoothing coefficient: base 0.8 modified by local stationarity (±0.05)
local_alpha = np.clip(0.8 - 0.05 * smooth_diff[min(i-1, len(smooth_diff)-1)], 0.75, 0.85)
smoothed_psd[i] = local_alpha * smoothed_psd[i-1] + (1 - local_alpha) * psd[i]
# Compute Tikhonov regularization gain based on deviation from median PSD.
noise_baseline = np.median(smoothed_psd)
raw_gain = (smoothed_psd / (noise_baseline + eps)) - 1.0
# Compute a causal-like gradient using the Savitzky-Golay filter.
win_len = 11 if len(smoothed_psd) >= 11 else ((len(smoothed_psd)//2)*2+1)
polyorder = 2 if win_len > 2 else 1
delta_freq = np.mean(np.diff(freqs))
grad_psd = savgol_filter(smoothed_psd, win_len, polyorder, deriv=1, delta=delta_freq, mode='interp')
# Nonlinear scaling via sigmoid to enhance gradient differences.
sigmoid = lambda x: 1.0 / (1.0 + np.exp(-x))
scaling_factor = 1.0 + 2.0 * sigmoid(np.abs(grad_psd) / (np.median(smoothed_psd) + eps))
# Compute adaptive gain factors with nonlinear scaling.
gain = 1.0 - np.exp(-0.5 * scaling_factor * raw_gain)
gain = np.clip(gain, -8.0, 8.0)
# FFT-based whitening: interpolate gain and PSD onto FFT frequency bins.
signal_fft = np.fft.rfft(centered)
freq_bins = np.fft.rfftfreq(n_samples, d=dt)
interp_gain = np.interp(freq_bins, freqs, gain, left=gain[0], right=gain[-1])
interp_psd = np.interp(freq_bins, freqs, smoothed_psd, left=smoothed_psd[0], right=smoothed_psd[-1])
denom = np.sqrt(interp_psd) * (np.abs(interp_gain) + eps)
denom = np.maximum(denom, eps)
white_fft = signal_fft / denom
whitened = np.fft.irfft(white_fft, n=n_samples)
return whitened
# Whiten H1 and L1 channels using the adapted method.
white_h1 = adaptive_whitening(detrended_h1)
white_l1 = adaptive_whitening(detrended_l1)
# -------------------- Stage 3: Coherent Time-Frequency Metric with Frequency-Conditioned Regularization --------------------
def compute_coherent_metric(w1: np.ndarray, w2: np.ndarray) -> tuple[np.ndarray, np.ndarray]:
# Compute complex spectrograms preserving phase information.
f1, t_spec, Sxx1 = signal.spectrogram(w1, fs=fs, nperseg=base_nperseg,
noverlap=base_noverlap, mode='complex', detrend=False)
f2, t_spec2, Sxx2 = signal.spectrogram(w2, fs=fs, nperseg=base_nperseg,
noverlap=base_noverlap, mode='complex', detrend=False)
# Ensure common time axis length.
common_len = min(len(t_spec), len(t_spec2))
t_spec = t_spec[:common_len]
Sxx1 = Sxx1[:, :common_len]
Sxx2 = Sxx2[:, :common_len]
# Compute phase differences and coherence between detectors.
phase_diff = np.angle(Sxx1) - np.angle(Sxx2)
phase_coherence = np.abs(np.cos(phase_diff))
# Estimate median PSD per frequency bin from the spectrograms.
psd1 = np.median(np.abs(Sxx1)**2, axis=1)
psd2 = np.median(np.abs(Sxx2)**2, axis=1)
# Frequency-conditioned regularization gain (reflection-guided).
lambda_f = 0.5 * ((np.median(psd1) / (psd1 + eps)) + (np.median(psd2) / (psd2 + eps)))
lambda_f = np.clip(lambda_f, 1e-4, 1e-2)
# Regularization denominator integrating detector PSDs and lambda.
reg_denom = (psd1[:, None] + psd2[:, None] + lambda_f[:, None] + eps)
# Weighted phase coherence that balances phase alignment with noise levels.
weighted_comp = phase_coherence / reg_denom
# Compute axial (frequency) second derivatives as curvature estimates.
d2_coh = np.gradient(np.gradient(phase_coherence, axis=0), axis=0)
avg_curvature = np.mean(np.abs(d2_coh), axis=0)
# Nonlinear activation boost using tanh for regions of high curvature.
nonlinear_boost = np.tanh(5 * avg_curvature)
linear_boost = 1.0 + 0.1 * avg_curvature
# Cross-detector synergy: weight derived from global median consistency.
novel_weight = np.mean((np.median(psd1) + np.median(psd2)) / (psd1[:, None] + psd2[:, None] + eps), axis=0)
# Integrated time-frequency metric combining all enhancements.
tf_metric = np.sum(weighted_comp * linear_boost * (1.0 + nonlinear_boost), axis=0) * novel_weight
# Adjust the spectrogram time axis to account for window delay.
metric_times = t_spec + times[0] + (base_nperseg / 2) / fs
return tf_metric, metric_times
tf_metric, metric_times = compute_coherent_metric(white_h1, white_l1)
# -------------------- Stage 4: Multi-Resolution Thresholding with Octave-Spaced Dyadic Wavelet Validation --------------------
def multi_resolution_thresholding(metric: np.ndarray, times_arr: np.ndarray) -> tuple[np.ndarray, np.ndarray, np.ndarray]:
# Robust background estimation with median and MAD.
bg_level = np.median(metric)
mad_val = np.median(np.abs(metric - bg_level))
robust_std = 1.4826 * mad_val
threshold = bg_level + 1.5 * robust_std
# Identify candidate peaks using prominence and minimum distance criteria.
peaks, _ = signal.find_peaks(metric, height=threshold, distance=2, prominence=0.8 * robust_std)
if peaks.size == 0:
return np.array([]), np.array([]), np.array([])
# Local uncertainty estimation using a Gaussian-weighted convolution.
win_range = np.arange(-uncertainty_window, uncertainty_window + 1)
sigma = uncertainty_window / 2.5
gauss_kernel = np.exp(-0.5 * (win_range / sigma) ** 2)
gauss_kernel /= np.sum(gauss_kernel)
weighted_mean = np.convolve(metric, gauss_kernel, mode='same')
weighted_sq = np.convolve(metric ** 2, gauss_kernel, mode='same')
variances = np.maximum(weighted_sq - weighted_mean ** 2, 0.0)
uncertainties = np.sqrt(variances)
uncertainties = np.maximum(uncertainties, 0.01)
valid_times = []
valid_heights = []
valid_uncerts = []
n_metric = len(metric)
# Compute a simple second derivative for local curvature checking.
if n_metric > 2:
second_deriv = np.diff(metric, n=2)
second_deriv = np.pad(second_deriv, (1, 1), mode='edge')
else:
second_deriv = np.zeros_like(metric)
# Use octave-spaced scales (dyadic wavelet validation) to validate peak significance.
widths = np.arange(1, 9) # approximate scales 1 to 8
for peak in peaks:
# Skip peaks lacking sufficient negative curvature.
if second_deriv[peak] > -0.1 * robust_std:
continue
local_start = max(0, peak - uncertainty_window)
local_end = min(n_metric, peak + uncertainty_window + 1)
local_segment = metric[local_start:local_end]
if len(local_segment) < 3:
continue
try:
cwt_coeff = signal.cwt(local_segment, signal.ricker, widths)
except Exception:
continue
max_coeff = np.max(np.abs(cwt_coeff))
# Threshold for validating the candidate using local MAD.
cwt_thresh = mad_val * np.sqrt(2 * np.log(len(local_segment) + eps))
if max_coeff >= cwt_thresh:
valid_times.append(times_arr[peak])
valid_heights.append(metric[peak])
valid_uncerts.append(uncertainties[peak])
if len(valid_times) == 0:
return np.array([]), np.array([]), np.array([])
return np.array(valid_times), np.array(valid_heights), np.array(valid_uncerts)
peak_times, peak_heights, peak_deltat = multi_resolution_thresholding(tf_metric, metric_times)
return peak_times, peak_heights, peak_deltatAlgorithmic Exploration:LLM Prompt Engineering
external_knowledge
(constraint)
Prompt Structure for Algorithm Evolution
This template guides the LLM to generate optimized gravitational wave detection algorithms by learning from comparative examples.
Key Components:
- Expert role establishment
- Example pair analysis (worse/better algorithm)
- Reflection on improvements
- Targeted new algorithm generation
- Strict output format enforcement
You are an expert in gravitational wave signal detection algorithms. Your task is to design heuristics that can effectively solve optimization problems.
{prompt_task}
I have analyzed two algorithms and provided a reflection on their differences.
[Worse code]
{worse_code}
[Better code]
{better_code}
[Reflection]
{reflection}
Based on this reflection, please write an improved algorithm according to the reflection.
First, describe the design idea and main steps of your algorithm in one sentence. The description must be inside a brace outside the code implementation. Next, implement it in Python as a function named '{func_name}'.
This function should accept {input_count} input(s): {joined_inputs}. The function should return {output_count} output(s): {joined_outputs}.
{inout_inf} {other_inf}
Do not give additional explanations.One Prompt Template for MLGWSC1 Algorithm Synthesis
hewang@ucas.ac.cn
HW & ZL, arXiv:2508.03661
AAD for GW detection Guided by LLM-informed Evo-MCTS
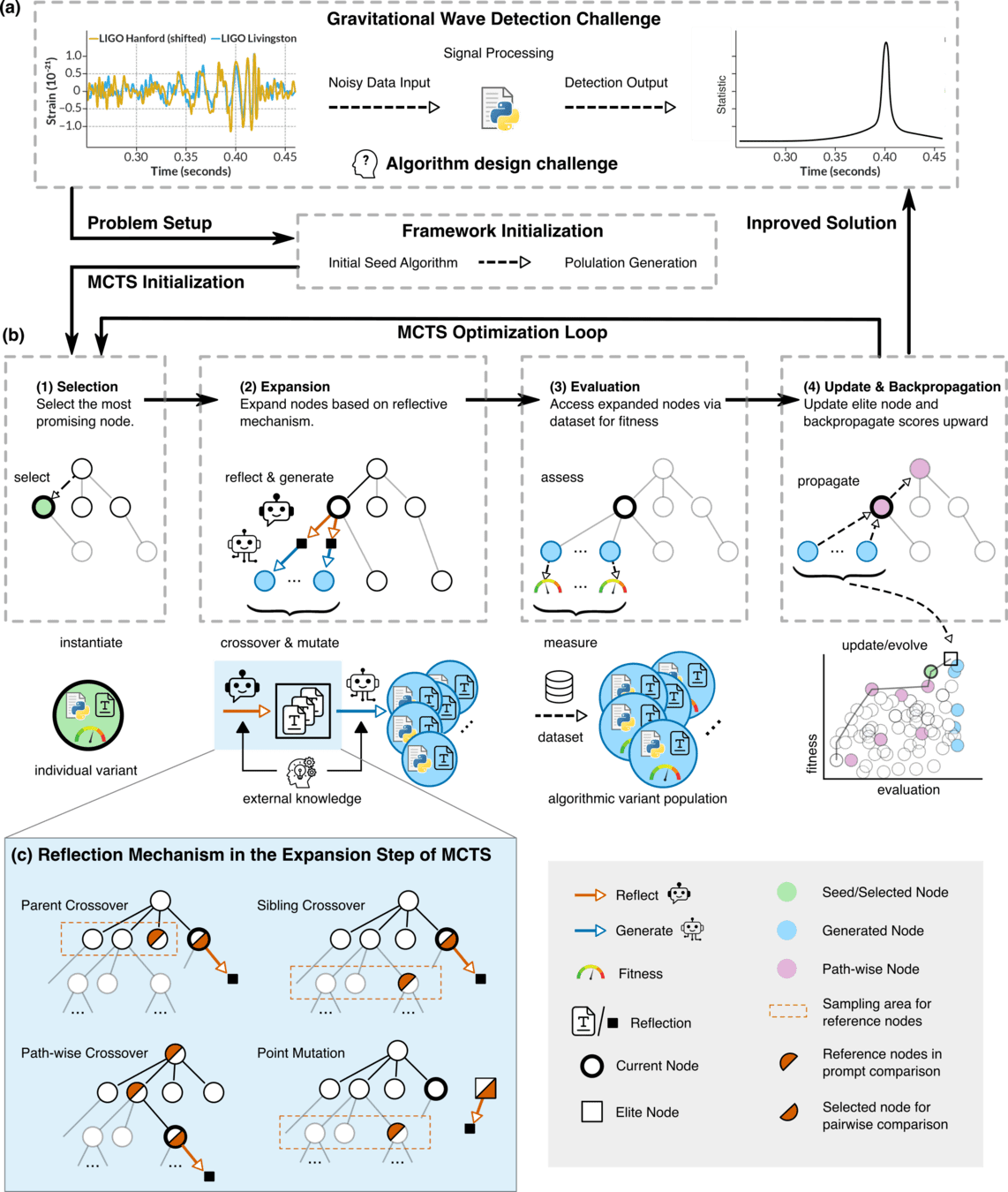
Algorithmic Synergy: MCTS, Evolution & LLM Agents
- Within each evolutionary iteration, MCTS decomposes complex signal detection problems into manageable decision sequences, enabling depth-wise and path-wise exploration of algorithmic possibilities.
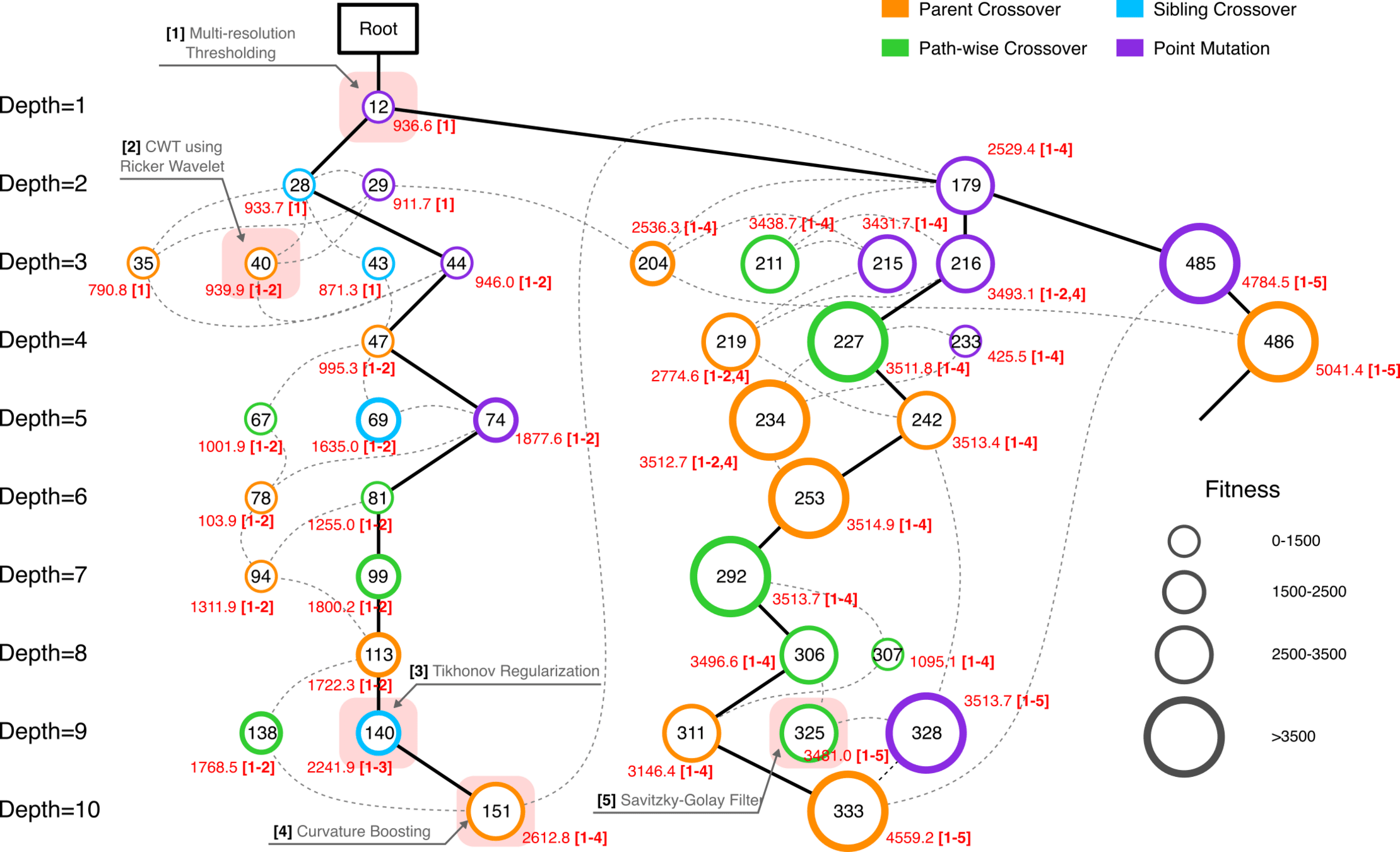
- We propose four evolutionary operations for MCTS expansion: Parent Crossover (PC) combines information from nodes at the parent level, Sibling Crossover (SC) exchanges features between nodes sharing the same parent, Point Mutation (PM) introduces random perturbations to individual nodes, and Path-wise Crossover (PWC) synthesizes information along complete trajectories from root to leaf.
hewang@ucas.ac.cn
AAD for GW detection Guided by LLM-informed Evo-MCTS
Algorithmic Synergy: MCTS, Evolution & LLM Agents
hewang@ucas.ac.cn

- deepseek-R1 for reflection generation
- o3-mini-medium for code generation
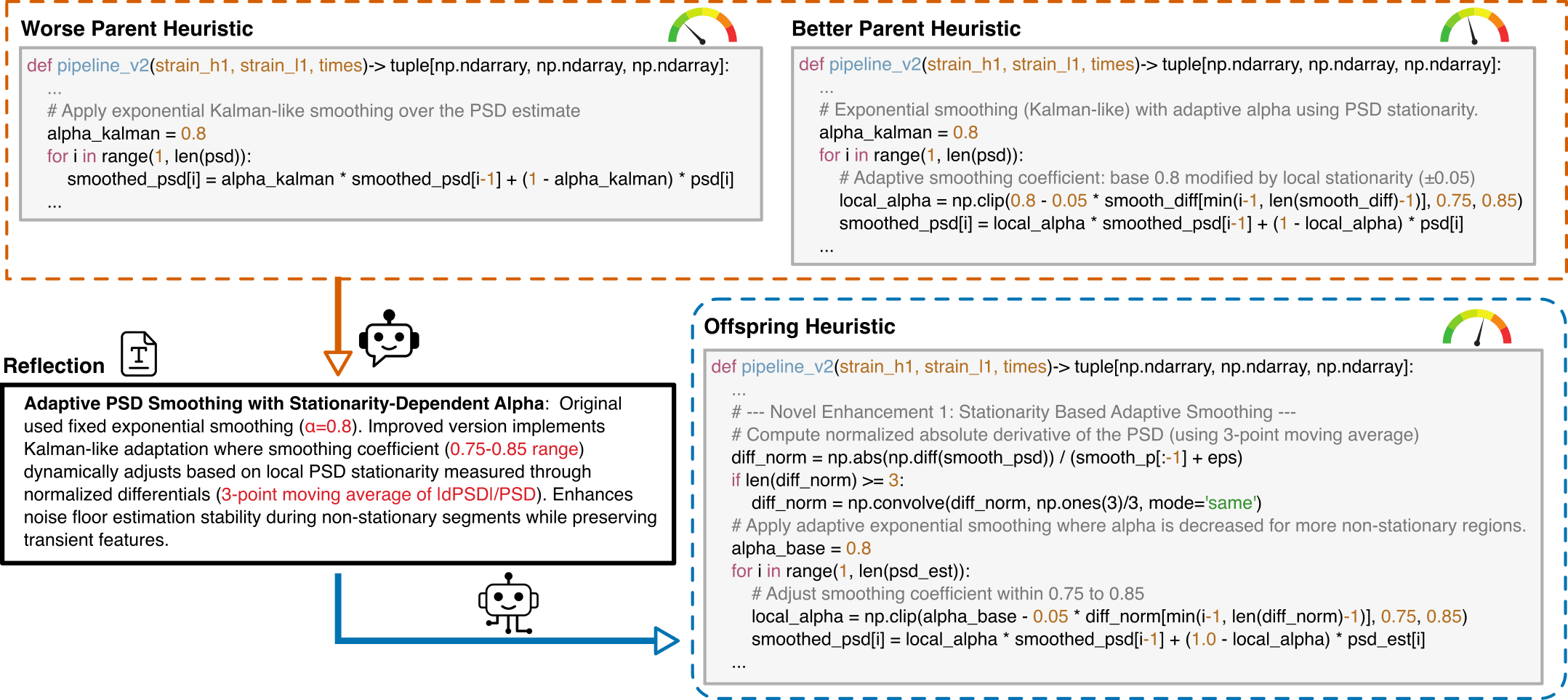
- LLM-Driven Algorithmic Evolution Through Reflective Code Synthesis.
AAD for GW detection Guided by LLM-informed Evo-MCTS
Algorithmic Synergy: MCTS, Evolution & LLM Agents
hewang@ucas.ac.cn
- deepseek-R1 for reflection generation
- o3-mini-medium for code generation
AAD for GW detection Guided by LLM-informed Evo-MCTS
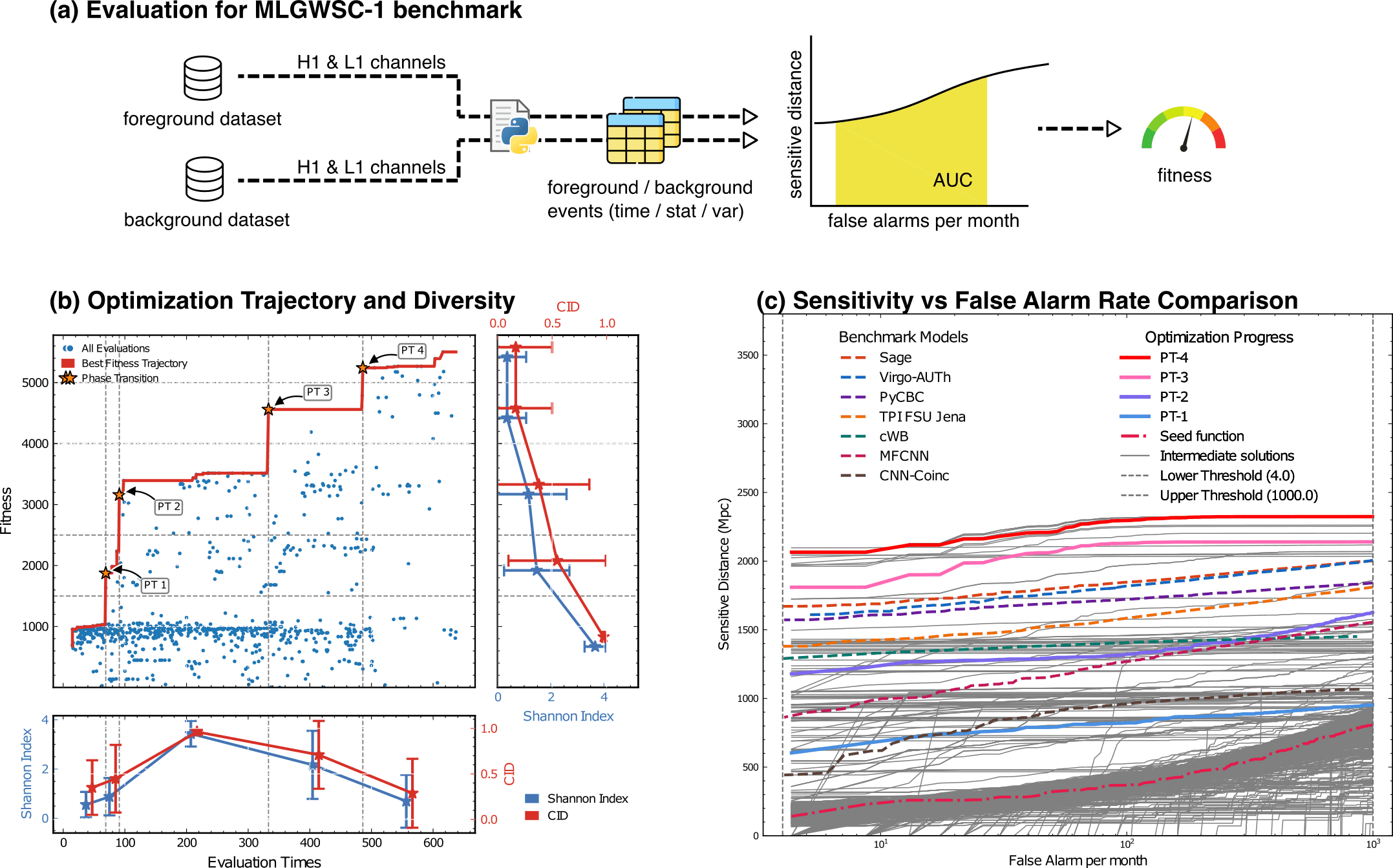
Evaluation for MLGWSC-1 benchmark
LLM-Driven Algorithmic Evolution Through Reflective Code Synthesis.
LLM-Informed Evo-MCTS for AAD
HW & ZL, arXiv:2508.03661
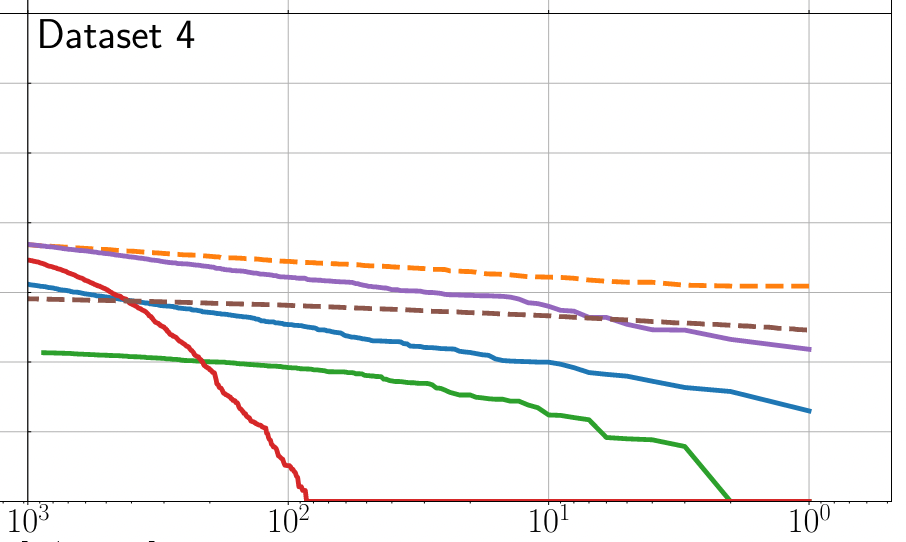
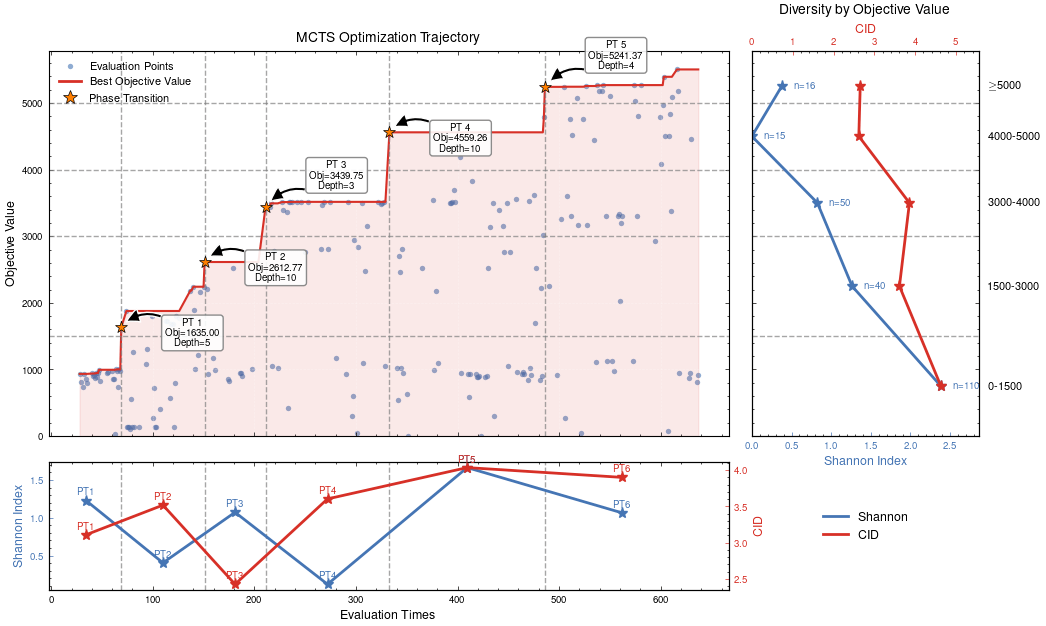
MLGWSC1 Benchmark: Optimization Performance Results
Pipeline Workflow
- Conditions raw detector data (whitening)
- Computes time-frequency metrics
- Identifies peaks above background
- Returns event candidates with timestamps
Diversity in Evolutionary Computation
Population encoding:
- Removing comments and docstrings using abstract-syntax tree,
- standardizing code snippets into a common coding style (e.g., PEP81),
- Convert code snippets to vector representations using a code embedding model.
hewang@ucas.ac.cn
HW & ZL, arXiv:2508.03661
AAD for GW detection Guided by LLM-informed Evo-MCTS
MLGWSC1 Benchmark: Optimization Performance Results
hewang@ucas.ac.cn
HW & ZL, arXiv:2508.03661
AAD for GW detection Guided by LLM-informed Evo-MCTS
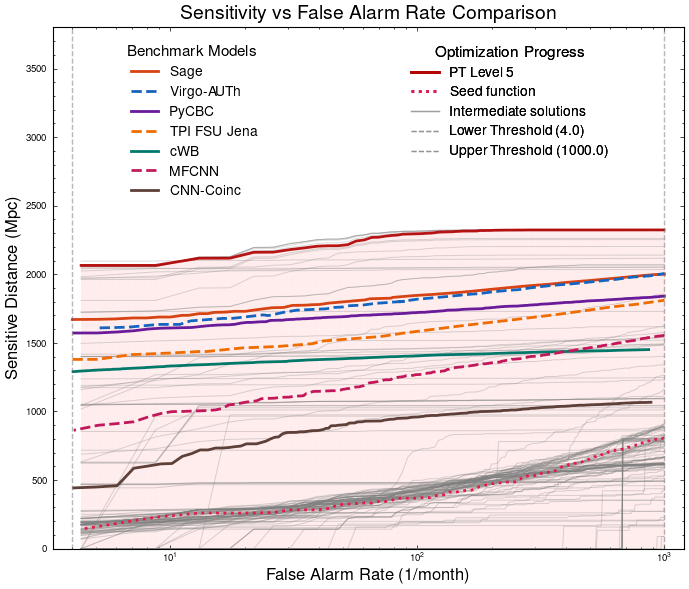
Automated exploration of algorithm parameter space
Benchmarking against state-of-the-art methods
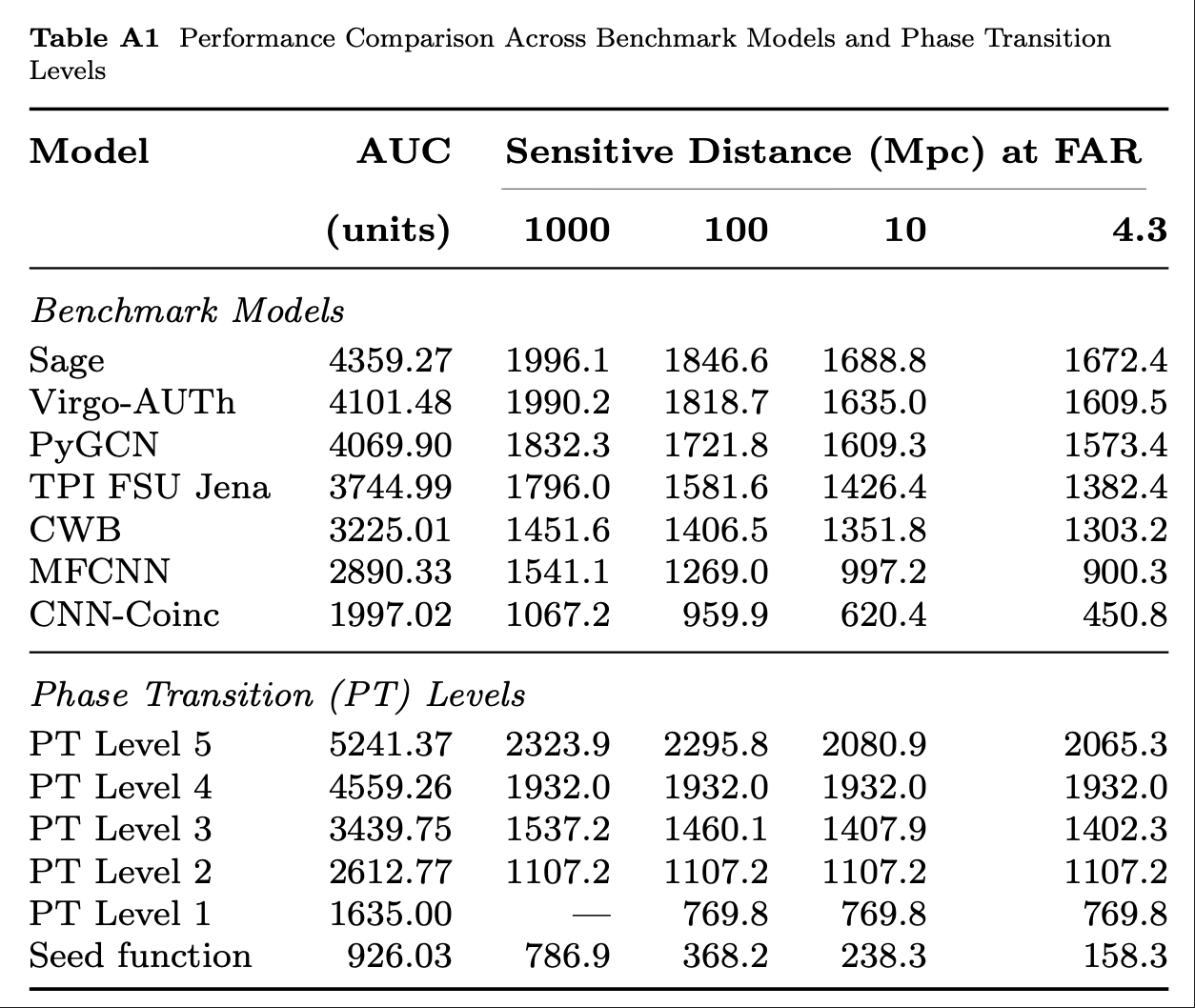
MLGWSC1 Benchmark: Optimization Performance Results
Refs of Benchmark Models
- Sage: 2501.13846 [gr-qc]
- Virgo-AUTh / TPI FSU Jena: PRD 110, 024024 (2024)
- Others: PRD 107, 023021 (2023)
hewang@ucas.ac.cn
HW & ZL, arXiv:2508.03661
20.2%
23.4%
AAD for GW detection Guided by LLM-informed Evo-MCTS
MLGWSC1 Benchmark: Optimization Performance Results
hewang@ucas.ac.cn
HW & ZL, arXiv:2508.03661
AAD for GW detection Guided by LLM-informed Evo-MCTS
PyCBC (linear-core)
cWB (nonlinear-core)
Simple filters (non-linear)
CNN-like (highly non-linear)
Automated exploration of algorithm parameter space
Benchmarking against state-of-the-art methods
20.2%
23.4%
Interpretability Analysis
hewang@ucas.ac.cn
HW & ZL, arXiv:2508.03661
Algorithmic Component Impact Analysis.
- A comprehensive technique impact analysis using controlled comparative methodology
AAD for GW detection Guided by LLM-informed Evo-MCTS
import numpy as np
import scipy.signal as signal
from scipy.signal.windows import tukey
from scipy.signal import savgol_filter
def pipeline_v2(strain_h1: np.ndarray, strain_l1: np.ndarray, times: np.ndarray) -> tuple[np.ndarray, np.ndarray, np.ndarray]:
"""
The pipeline function processes gravitational wave data from the H1 and L1 detectors to identify potential gravitational wave signals.
It takes strain_h1 and strain_l1 numpy arrays containing detector data, and times array with corresponding time points.
The function returns a tuple of three numpy arrays: peak_times containing GPS times of identified events,
peak_heights with significance values of each peak, and peak_deltat showing time window uncertainty for each peak.
"""
eps = np.finfo(float).tiny
dt = times[1] - times[0]
fs = 1.0 / dt
# Base spectrogram parameters
base_nperseg = 256
base_noverlap = base_nperseg // 2
medfilt_kernel = 101 # odd kernel size for robust detrending
uncertainty_window = 5 # half-window for local timing uncertainty
# -------------------- Stage 1: Robust Baseline Detrending --------------------
# Remove long-term trends using a median filter for each channel.
detrended_h1 = strain_h1 - signal.medfilt(strain_h1, kernel_size=medfilt_kernel)
detrended_l1 = strain_l1 - signal.medfilt(strain_l1, kernel_size=medfilt_kernel)
# -------------------- Stage 2: Adaptive Whitening with Enhanced PSD Smoothing --------------------
def adaptive_whitening(strain: np.ndarray) -> np.ndarray:
# Center the signal.
centered = strain - np.mean(strain)
n_samples = len(centered)
# Adaptive window length: between 5 and 30 seconds
win_length_sec = np.clip(n_samples / fs / 20, 5, 30)
nperseg_adapt = int(win_length_sec * fs)
nperseg_adapt = max(10, min(nperseg_adapt, n_samples))
# Create a Tukey window with 75% overlap.
tukey_alpha = 0.25
win = tukey(nperseg_adapt, alpha=tukey_alpha)
noverlap_adapt = int(nperseg_adapt * 0.75)
if noverlap_adapt >= nperseg_adapt:
noverlap_adapt = nperseg_adapt - 1
# Estimate the power spectral density (PSD) using Welch's method.
freqs, psd = signal.welch(centered, fs=fs, nperseg=nperseg_adapt,
noverlap=noverlap_adapt, window=win, detrend='constant')
psd = np.maximum(psd, eps)
# Compute relative differences for PSD stationarity measure.
diff_arr = np.abs(np.diff(psd)) / (psd[:-1] + eps)
# Smooth the derivative with a moving average.
if len(diff_arr) >= 3:
smooth_diff = np.convolve(diff_arr, np.ones(3)/3, mode='same')
else:
smooth_diff = diff_arr
# Exponential smoothing (Kalman-like) with adaptive alpha using PSD stationarity.
smoothed_psd = np.copy(psd)
for i in range(1, len(psd)):
# Adaptive smoothing coefficient: base 0.8 modified by local stationarity (±0.05)
local_alpha = np.clip(0.8 - 0.05 * smooth_diff[min(i-1, len(smooth_diff)-1)], 0.75, 0.85)
smoothed_psd[i] = local_alpha * smoothed_psd[i-1] + (1 - local_alpha) * psd[i]
# Compute Tikhonov regularization gain based on deviation from median PSD.
noise_baseline = np.median(smoothed_psd)
raw_gain = (smoothed_psd / (noise_baseline + eps)) - 1.0
# Compute a causal-like gradient using the Savitzky-Golay filter.
win_len = 11 if len(smoothed_psd) >= 11 else ((len(smoothed_psd)//2)*2+1)
polyorder = 2 if win_len > 2 else 1
delta_freq = np.mean(np.diff(freqs))
grad_psd = savgol_filter(smoothed_psd, win_len, polyorder, deriv=1, delta=delta_freq, mode='interp')
# Nonlinear scaling via sigmoid to enhance gradient differences.
sigmoid = lambda x: 1.0 / (1.0 + np.exp(-x))
scaling_factor = 1.0 + 2.0 * sigmoid(np.abs(grad_psd) / (np.median(smoothed_psd) + eps))
# Compute adaptive gain factors with nonlinear scaling.
gain = 1.0 - np.exp(-0.5 * scaling_factor * raw_gain)
gain = np.clip(gain, -8.0, 8.0)
# FFT-based whitening: interpolate gain and PSD onto FFT frequency bins.
signal_fft = np.fft.rfft(centered)
freq_bins = np.fft.rfftfreq(n_samples, d=dt)
interp_gain = np.interp(freq_bins, freqs, gain, left=gain[0], right=gain[-1])
interp_psd = np.interp(freq_bins, freqs, smoothed_psd, left=smoothed_psd[0], right=smoothed_psd[-1])
denom = np.sqrt(interp_psd) * (np.abs(interp_gain) + eps)
denom = np.maximum(denom, eps)
white_fft = signal_fft / denom
whitened = np.fft.irfft(white_fft, n=n_samples)
return whitened
# Whiten H1 and L1 channels using the adapted method.
white_h1 = adaptive_whitening(detrended_h1)
white_l1 = adaptive_whitening(detrended_l1)
# -------------------- Stage 3: Coherent Time-Frequency Metric with Frequency-Conditioned Regularization --------------------
def compute_coherent_metric(w1: np.ndarray, w2: np.ndarray) -> tuple[np.ndarray, np.ndarray]:
# Compute complex spectrograms preserving phase information.
f1, t_spec, Sxx1 = signal.spectrogram(w1, fs=fs, nperseg=base_nperseg,
noverlap=base_noverlap, mode='complex', detrend=False)
f2, t_spec2, Sxx2 = signal.spectrogram(w2, fs=fs, nperseg=base_nperseg,
noverlap=base_noverlap, mode='complex', detrend=False)
# Ensure common time axis length.
common_len = min(len(t_spec), len(t_spec2))
t_spec = t_spec[:common_len]
Sxx1 = Sxx1[:, :common_len]
Sxx2 = Sxx2[:, :common_len]
# Compute phase differences and coherence between detectors.
phase_diff = np.angle(Sxx1) - np.angle(Sxx2)
phase_coherence = np.abs(np.cos(phase_diff))
# Estimate median PSD per frequency bin from the spectrograms.
psd1 = np.median(np.abs(Sxx1)**2, axis=1)
psd2 = np.median(np.abs(Sxx2)**2, axis=1)
# Frequency-conditioned regularization gain (reflection-guided).
lambda_f = 0.5 * ((np.median(psd1) / (psd1 + eps)) + (np.median(psd2) / (psd2 + eps)))
lambda_f = np.clip(lambda_f, 1e-4, 1e-2)
# Regularization denominator integrating detector PSDs and lambda.
reg_denom = (psd1[:, None] + psd2[:, None] + lambda_f[:, None] + eps)
# Weighted phase coherence that balances phase alignment with noise levels.
weighted_comp = phase_coherence / reg_denom
# Compute axial (frequency) second derivatives as curvature estimates.
d2_coh = np.gradient(np.gradient(phase_coherence, axis=0), axis=0)
avg_curvature = np.mean(np.abs(d2_coh), axis=0)
# Nonlinear activation boost using tanh for regions of high curvature.
nonlinear_boost = np.tanh(5 * avg_curvature)
linear_boost = 1.0 + 0.1 * avg_curvature
# Cross-detector synergy: weight derived from global median consistency.
novel_weight = np.mean((np.median(psd1) + np.median(psd2)) / (psd1[:, None] + psd2[:, None] + eps), axis=0)
# Integrated time-frequency metric combining all enhancements.
tf_metric = np.sum(weighted_comp * linear_boost * (1.0 + nonlinear_boost), axis=0) * novel_weight
# Adjust the spectrogram time axis to account for window delay.
metric_times = t_spec + times[0] + (base_nperseg / 2) / fs
return tf_metric, metric_times
tf_metric, metric_times = compute_coherent_metric(white_h1, white_l1)
# -------------------- Stage 4: Multi-Resolution Thresholding with Octave-Spaced Dyadic Wavelet Validation --------------------
def multi_resolution_thresholding(metric: np.ndarray, times_arr: np.ndarray) -> tuple[np.ndarray, np.ndarray, np.ndarray]:
# Robust background estimation with median and MAD.
bg_level = np.median(metric)
mad_val = np.median(np.abs(metric - bg_level))
robust_std = 1.4826 * mad_val
threshold = bg_level + 1.5 * robust_std
# Identify candidate peaks using prominence and minimum distance criteria.
peaks, _ = signal.find_peaks(metric, height=threshold, distance=2, prominence=0.8 * robust_std)
if peaks.size == 0:
return np.array([]), np.array([]), np.array([])
# Local uncertainty estimation using a Gaussian-weighted convolution.
win_range = np.arange(-uncertainty_window, uncertainty_window + 1)
sigma = uncertainty_window / 2.5
gauss_kernel = np.exp(-0.5 * (win_range / sigma) ** 2)
gauss_kernel /= np.sum(gauss_kernel)
weighted_mean = np.convolve(metric, gauss_kernel, mode='same')
weighted_sq = np.convolve(metric ** 2, gauss_kernel, mode='same')
variances = np.maximum(weighted_sq - weighted_mean ** 2, 0.0)
uncertainties = np.sqrt(variances)
uncertainties = np.maximum(uncertainties, 0.01)
valid_times = []
valid_heights = []
valid_uncerts = []
n_metric = len(metric)
# Compute a simple second derivative for local curvature checking.
if n_metric > 2:
second_deriv = np.diff(metric, n=2)
second_deriv = np.pad(second_deriv, (1, 1), mode='edge')
else:
second_deriv = np.zeros_like(metric)
# Use octave-spaced scales (dyadic wavelet validation) to validate peak significance.
widths = np.arange(1, 9) # approximate scales 1 to 8
for peak in peaks:
# Skip peaks lacking sufficient negative curvature.
if second_deriv[peak] > -0.1 * robust_std:
continue
local_start = max(0, peak - uncertainty_window)
local_end = min(n_metric, peak + uncertainty_window + 1)
local_segment = metric[local_start:local_end]
if len(local_segment) < 3:
continue
try:
cwt_coeff = signal.cwt(local_segment, signal.ricker, widths)
except Exception:
continue
max_coeff = np.max(np.abs(cwt_coeff))
# Threshold for validating the candidate using local MAD.
cwt_thresh = mad_val * np.sqrt(2 * np.log(len(local_segment) + eps))
if max_coeff >= cwt_thresh:
valid_times.append(times_arr[peak])
valid_heights.append(metric[peak])
valid_uncerts.append(uncertainties[peak])
if len(valid_times) == 0:
return np.array([]), np.array([]), np.array([])
return np.array(valid_times), np.array(valid_heights), np.array(valid_uncerts)
peak_times, peak_heights, peak_deltat = multi_resolution_thresholding(tf_metric, metric_times)
return peak_times, peak_heights, peak_deltat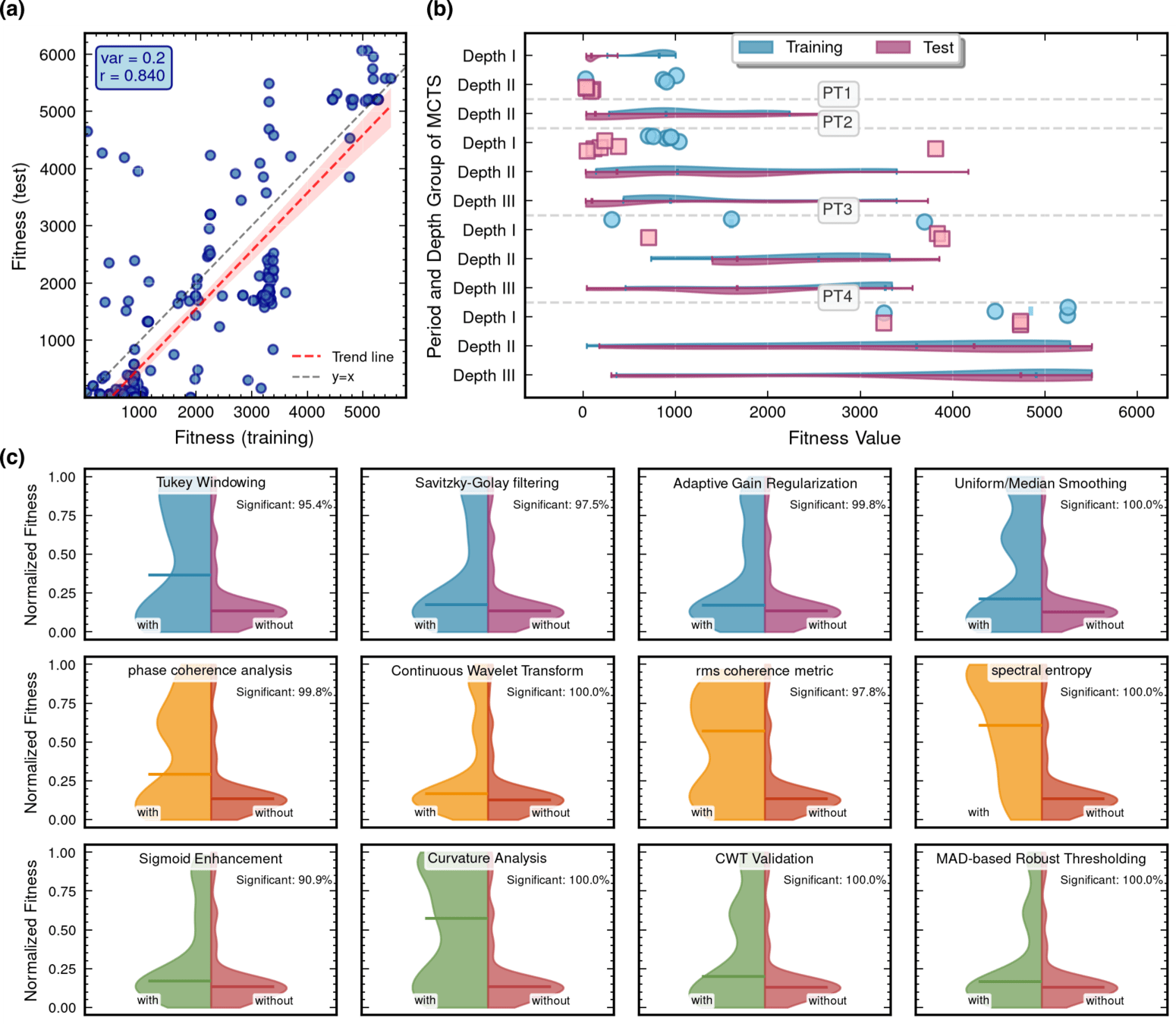
- Automatically discover and interpret the value of nonlinear algorithms
- Facilitating new knowledge production along with experience guidance
PT Level 5
Interpretability Analysis: PT Level 5
import numpy as np
import scipy.signal as signal
from scipy.signal.windows import tukey
from scipy.signal import savgol_filter
def pipeline_v2(strain_h1: np.ndarray, strain_l1: np.ndarray, times: np.ndarray) -> tuple[np.ndarray, np.ndarray, np.ndarray]:
"""
The pipeline function processes gravitational wave data from the H1 and L1 detectors to identify potential gravitational wave signals.
It takes strain_h1 and strain_l1 numpy arrays containing detector data, and times array with corresponding time points.
The function returns a tuple of three numpy arrays: peak_times containing GPS times of identified events,
peak_heights with significance values of each peak, and peak_deltat showing time window uncertainty for each peak.
"""
eps = np.finfo(float).tiny
dt = times[1] - times[0]
fs = 1.0 / dt
# Base spectrogram parameters
base_nperseg = 256
base_noverlap = base_nperseg // 2
medfilt_kernel = 101 # odd kernel size for robust detrending
uncertainty_window = 5 # half-window for local timing uncertainty
# -------------------- Stage 1: Robust Baseline Detrending --------------------
# Remove long-term trends using a median filter for each channel.
detrended_h1 = strain_h1 - signal.medfilt(strain_h1, kernel_size=medfilt_kernel)
detrended_l1 = strain_l1 - signal.medfilt(strain_l1, kernel_size=medfilt_kernel)
# -------------------- Stage 2: Adaptive Whitening with Enhanced PSD Smoothing --------------------
def adaptive_whitening(strain: np.ndarray) -> np.ndarray:
# Center the signal.
centered = strain - np.mean(strain)
n_samples = len(centered)
# Adaptive window length: between 5 and 30 seconds
win_length_sec = np.clip(n_samples / fs / 20, 5, 30)
nperseg_adapt = int(win_length_sec * fs)
nperseg_adapt = max(10, min(nperseg_adapt, n_samples))
# Create a Tukey window with 75% overlap.
tukey_alpha = 0.25
win = tukey(nperseg_adapt, alpha=tukey_alpha)
noverlap_adapt = int(nperseg_adapt * 0.75)
if noverlap_adapt >= nperseg_adapt:
noverlap_adapt = nperseg_adapt - 1
# Estimate the power spectral density (PSD) using Welch's method.
freqs, psd = signal.welch(centered, fs=fs, nperseg=nperseg_adapt,
noverlap=noverlap_adapt, window=win, detrend='constant')
psd = np.maximum(psd, eps)
# Compute relative differences for PSD stationarity measure.
diff_arr = np.abs(np.diff(psd)) / (psd[:-1] + eps)
# Smooth the derivative with a moving average.
if len(diff_arr) >= 3:
smooth_diff = np.convolve(diff_arr, np.ones(3)/3, mode='same')
else:
smooth_diff = diff_arr
# Exponential smoothing (Kalman-like) with adaptive alpha using PSD stationarity.
smoothed_psd = np.copy(psd)
for i in range(1, len(psd)):
# Adaptive smoothing coefficient: base 0.8 modified by local stationarity (±0.05)
local_alpha = np.clip(0.8 - 0.05 * smooth_diff[min(i-1, len(smooth_diff)-1)], 0.75, 0.85)
smoothed_psd[i] = local_alpha * smoothed_psd[i-1] + (1 - local_alpha) * psd[i]
# Compute Tikhonov regularization gain based on deviation from median PSD.
noise_baseline = np.median(smoothed_psd)
raw_gain = (smoothed_psd / (noise_baseline + eps)) - 1.0
# Compute a causal-like gradient using the Savitzky-Golay filter.
win_len = 11 if len(smoothed_psd) >= 11 else ((len(smoothed_psd)//2)*2+1)
polyorder = 2 if win_len > 2 else 1
delta_freq = np.mean(np.diff(freqs))
grad_psd = savgol_filter(smoothed_psd, win_len, polyorder, deriv=1, delta=delta_freq, mode='interp')
# Nonlinear scaling via sigmoid to enhance gradient differences.
sigmoid = lambda x: 1.0 / (1.0 + np.exp(-x))
scaling_factor = 1.0 + 2.0 * sigmoid(np.abs(grad_psd) / (np.median(smoothed_psd) + eps))
# Compute adaptive gain factors with nonlinear scaling.
gain = 1.0 - np.exp(-0.5 * scaling_factor * raw_gain)
gain = np.clip(gain, -8.0, 8.0)
# FFT-based whitening: interpolate gain and PSD onto FFT frequency bins.
signal_fft = np.fft.rfft(centered)
freq_bins = np.fft.rfftfreq(n_samples, d=dt)
interp_gain = np.interp(freq_bins, freqs, gain, left=gain[0], right=gain[-1])
interp_psd = np.interp(freq_bins, freqs, smoothed_psd, left=smoothed_psd[0], right=smoothed_psd[-1])
denom = np.sqrt(interp_psd) * (np.abs(interp_gain) + eps)
denom = np.maximum(denom, eps)
white_fft = signal_fft / denom
whitened = np.fft.irfft(white_fft, n=n_samples)
return whitened
# Whiten H1 and L1 channels using the adapted method.
white_h1 = adaptive_whitening(detrended_h1)
white_l1 = adaptive_whitening(detrended_l1)
# -------------------- Stage 3: Coherent Time-Frequency Metric with Frequency-Conditioned Regularization --------------------
def compute_coherent_metric(w1: np.ndarray, w2: np.ndarray) -> tuple[np.ndarray, np.ndarray]:
# Compute complex spectrograms preserving phase information.
f1, t_spec, Sxx1 = signal.spectrogram(w1, fs=fs, nperseg=base_nperseg,
noverlap=base_noverlap, mode='complex', detrend=False)
f2, t_spec2, Sxx2 = signal.spectrogram(w2, fs=fs, nperseg=base_nperseg,
noverlap=base_noverlap, mode='complex', detrend=False)
# Ensure common time axis length.
common_len = min(len(t_spec), len(t_spec2))
t_spec = t_spec[:common_len]
Sxx1 = Sxx1[:, :common_len]
Sxx2 = Sxx2[:, :common_len]
# Compute phase differences and coherence between detectors.
phase_diff = np.angle(Sxx1) - np.angle(Sxx2)
phase_coherence = np.abs(np.cos(phase_diff))
# Estimate median PSD per frequency bin from the spectrograms.
psd1 = np.median(np.abs(Sxx1)**2, axis=1)
psd2 = np.median(np.abs(Sxx2)**2, axis=1)
# Frequency-conditioned regularization gain (reflection-guided).
lambda_f = 0.5 * ((np.median(psd1) / (psd1 + eps)) + (np.median(psd2) / (psd2 + eps)))
lambda_f = np.clip(lambda_f, 1e-4, 1e-2)
# Regularization denominator integrating detector PSDs and lambda.
reg_denom = (psd1[:, None] + psd2[:, None] + lambda_f[:, None] + eps)
# Weighted phase coherence that balances phase alignment with noise levels.
weighted_comp = phase_coherence / reg_denom
# Compute axial (frequency) second derivatives as curvature estimates.
d2_coh = np.gradient(np.gradient(phase_coherence, axis=0), axis=0)
avg_curvature = np.mean(np.abs(d2_coh), axis=0)
# Nonlinear activation boost using tanh for regions of high curvature.
nonlinear_boost = np.tanh(5 * avg_curvature)
linear_boost = 1.0 + 0.1 * avg_curvature
# Cross-detector synergy: weight derived from global median consistency.
novel_weight = np.mean((np.median(psd1) + np.median(psd2)) / (psd1[:, None] + psd2[:, None] + eps), axis=0)
# Integrated time-frequency metric combining all enhancements.
tf_metric = np.sum(weighted_comp * linear_boost * (1.0 + nonlinear_boost), axis=0) * novel_weight
# Adjust the spectrogram time axis to account for window delay.
metric_times = t_spec + times[0] + (base_nperseg / 2) / fs
return tf_metric, metric_times
tf_metric, metric_times = compute_coherent_metric(white_h1, white_l1)
# -------------------- Stage 4: Multi-Resolution Thresholding with Octave-Spaced Dyadic Wavelet Validation --------------------
def multi_resolution_thresholding(metric: np.ndarray, times_arr: np.ndarray) -> tuple[np.ndarray, np.ndarray, np.ndarray]:
# Robust background estimation with median and MAD.
bg_level = np.median(metric)
mad_val = np.median(np.abs(metric - bg_level))
robust_std = 1.4826 * mad_val
threshold = bg_level + 1.5 * robust_std
# Identify candidate peaks using prominence and minimum distance criteria.
peaks, _ = signal.find_peaks(metric, height=threshold, distance=2, prominence=0.8 * robust_std)
if peaks.size == 0:
return np.array([]), np.array([]), np.array([])
# Local uncertainty estimation using a Gaussian-weighted convolution.
win_range = np.arange(-uncertainty_window, uncertainty_window + 1)
sigma = uncertainty_window / 2.5
gauss_kernel = np.exp(-0.5 * (win_range / sigma) ** 2)
gauss_kernel /= np.sum(gauss_kernel)
weighted_mean = np.convolve(metric, gauss_kernel, mode='same')
weighted_sq = np.convolve(metric ** 2, gauss_kernel, mode='same')
variances = np.maximum(weighted_sq - weighted_mean ** 2, 0.0)
uncertainties = np.sqrt(variances)
uncertainties = np.maximum(uncertainties, 0.01)
valid_times = []
valid_heights = []
valid_uncerts = []
n_metric = len(metric)
# Compute a simple second derivative for local curvature checking.
if n_metric > 2:
second_deriv = np.diff(metric, n=2)
second_deriv = np.pad(second_deriv, (1, 1), mode='edge')
else:
second_deriv = np.zeros_like(metric)
# Use octave-spaced scales (dyadic wavelet validation) to validate peak significance.
widths = np.arange(1, 9) # approximate scales 1 to 8
for peak in peaks:
# Skip peaks lacking sufficient negative curvature.
if second_deriv[peak] > -0.1 * robust_std:
continue
local_start = max(0, peak - uncertainty_window)
local_end = min(n_metric, peak + uncertainty_window + 1)
local_segment = metric[local_start:local_end]
if len(local_segment) < 3:
continue
try:
cwt_coeff = signal.cwt(local_segment, signal.ricker, widths)
except Exception:
continue
max_coeff = np.max(np.abs(cwt_coeff))
# Threshold for validating the candidate using local MAD.
cwt_thresh = mad_val * np.sqrt(2 * np.log(len(local_segment) + eps))
if max_coeff >= cwt_thresh:
valid_times.append(times_arr[peak])
valid_heights.append(metric[peak])
valid_uncerts.append(uncertainties[peak])
if len(valid_times) == 0:
return np.array([]), np.array([]), np.array([])
return np.array(valid_times), np.array(valid_heights), np.array(valid_uncerts)
peak_times, peak_heights, peak_deltat = multi_resolution_thresholding(tf_metric, metric_times)
return peak_times, peak_heights, peak_deltathewang@ucas.ac.cn
HW & ZL, arXiv:2508.03661
AAD for GW detection Guided by LLM-informed Evo-MCTS
Interpretability Analysis
Out-of-distribution (OOD) detection
- Generalization capability and robustness of the optimized algorithms
hewang@ucas.ac.cn
HW & ZL, arXiv:2508.03661
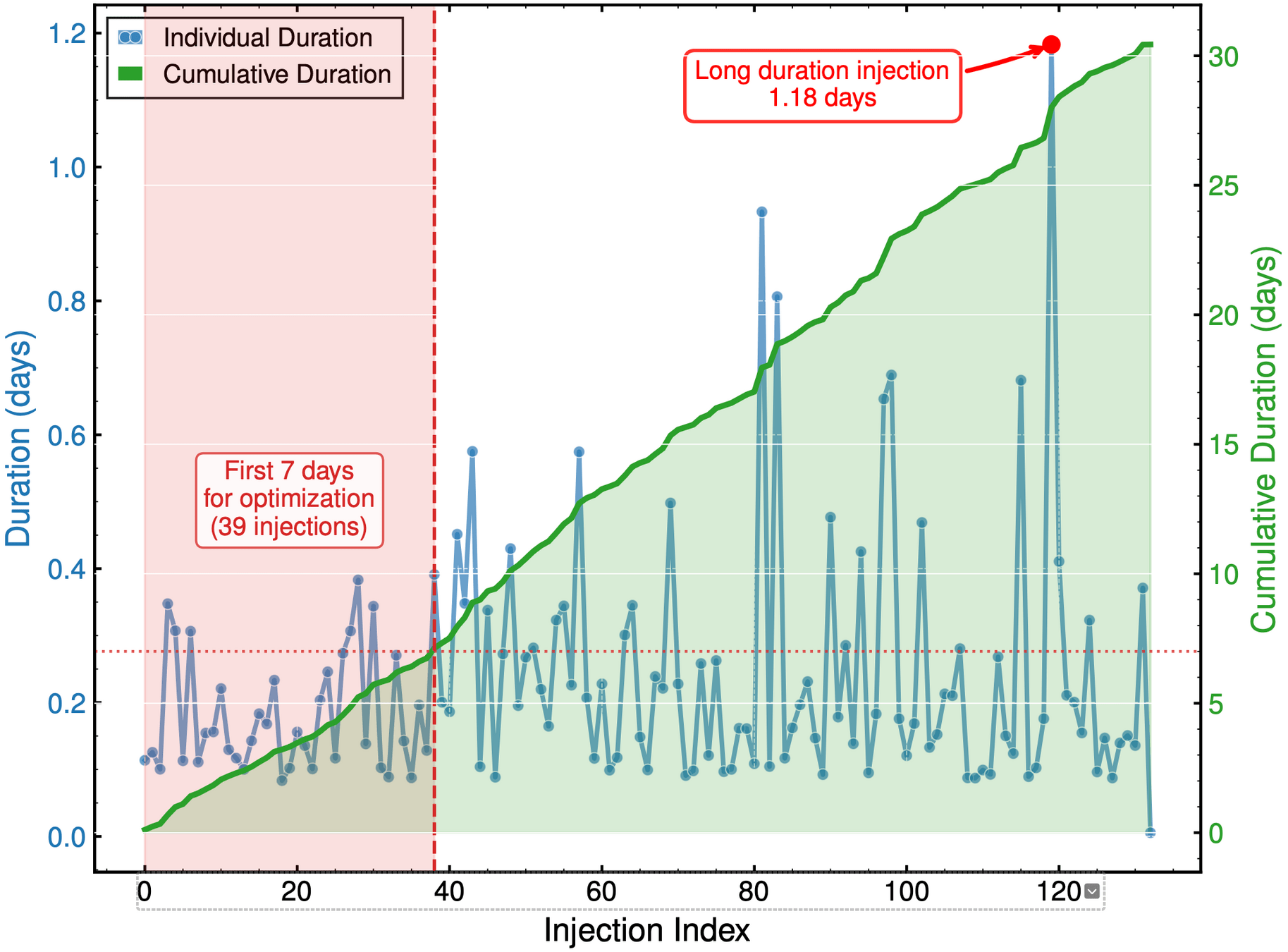
MCTS Depth-Stratified Performance Analysis.
- Analyzed the relationship between MCTS tree depth and algorithm fitness across different optimization phases. The 10-layer MCTS structure was stratified into three depth groups: Depth I (depths 1-4), Depth II (depths 5-7), and Depth III (depths 8-10), representing shallow, intermediate, and deep exploration levels, respectively.
Algorithmic Component Impact Analysis.
- A comprehensive technique impact analysis using controlled comparative methodology
AAD for GW detection Guided by LLM-informed Evo-MCTS
Interpretability Analysis
hewang@ucas.ac.cn
HW & ZL, arXiv:2508.03661
Algorithmic Component Impact Analysis.
- A comprehensive technique impact analysis using controlled comparative methodology
Please analyze the following Python code snippet for gravitational wave detection and
extract technical features in JSON format.
The code typically has three main stages:
1. Data Conditioning: preprocessing, filtering, whitening, etc.
2. Time-Frequency Analysis: spectrograms, FFT, wavelets, etc.
3. Trigger Analysis: peak detection, thresholding, validation, etc.
For each stage present in the code, extract:
- Technical methods used
- Libraries and functions called
- Algorithm complexity features
- Key parameters
Code to analyze:
```python
{code_snippet}
```
Please return a JSON object with this structure:
{
"algorithm_id": "{algorithm_id}",
"stages": {
"data_conditioning": {
"present": true/false,
"techniques": ["technique1", "technique2"],
"libraries": ["lib1", "lib2"],
"functions": ["func1", "func2"],
"parameters": {"param1": "value1"},
"complexity": "low/medium/high"
},
"time_frequency_analysis": {...},
"trigger_analysis": {...}
},
"overall_complexity": "low/medium/high",
"total_lines": 0,
"unique_libraries": ["lib1", "lib2"],
"code_quality_score": 0.0
}
Only return the JSON object, no additional text.AAD for GW detection Guided by LLM-informed Evo-MCTS
Interpretability Analysis
hewang@ucas.ac.cn
HW & ZL, arXiv:2508.03661
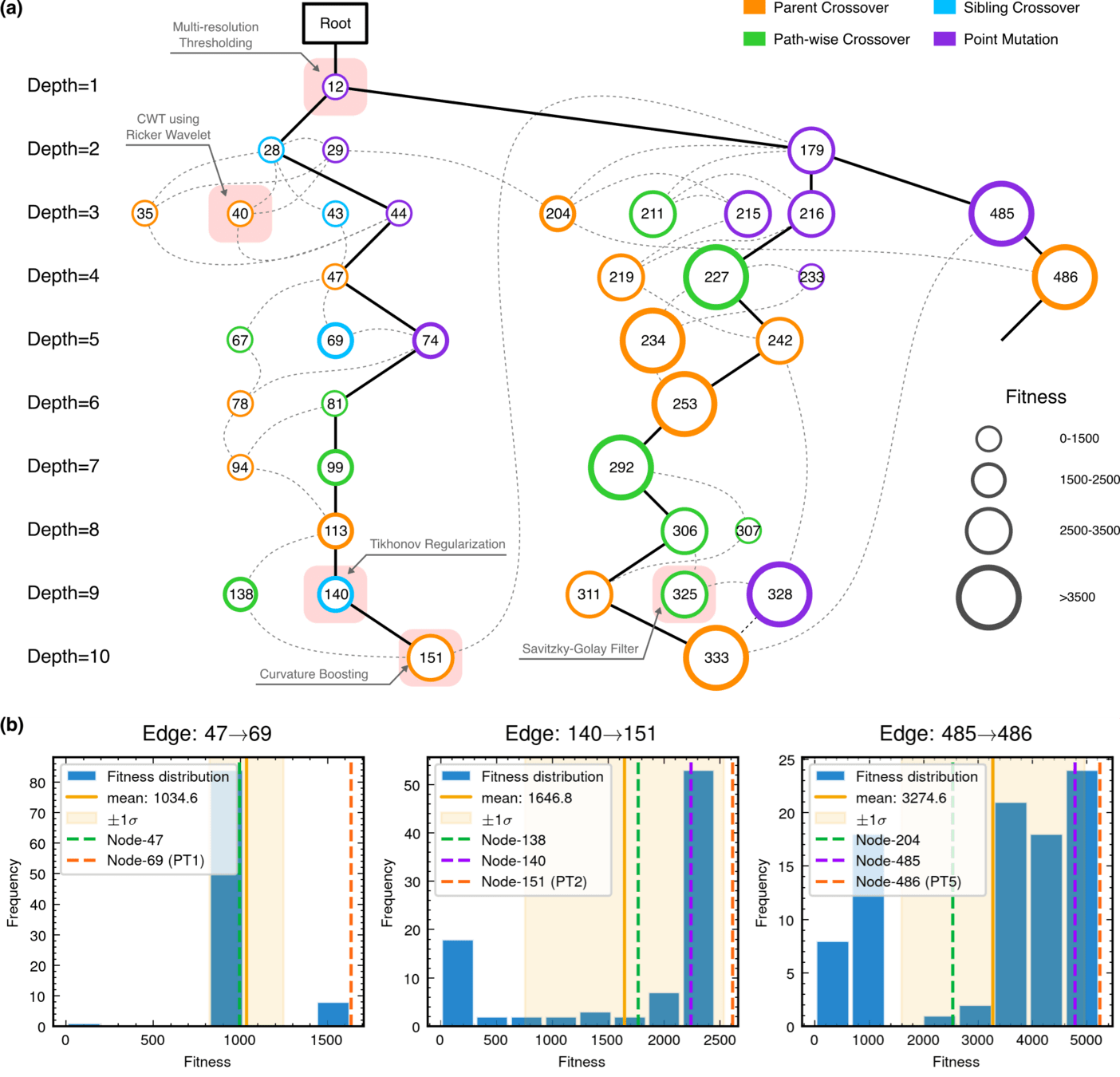
MCTS Algorithmic Evolution Pathway
- Complete MCTS tree structure showing all nodes associated with the optimal algorithm.
AAD for GW detection Guided by LLM-informed Evo-MCTS
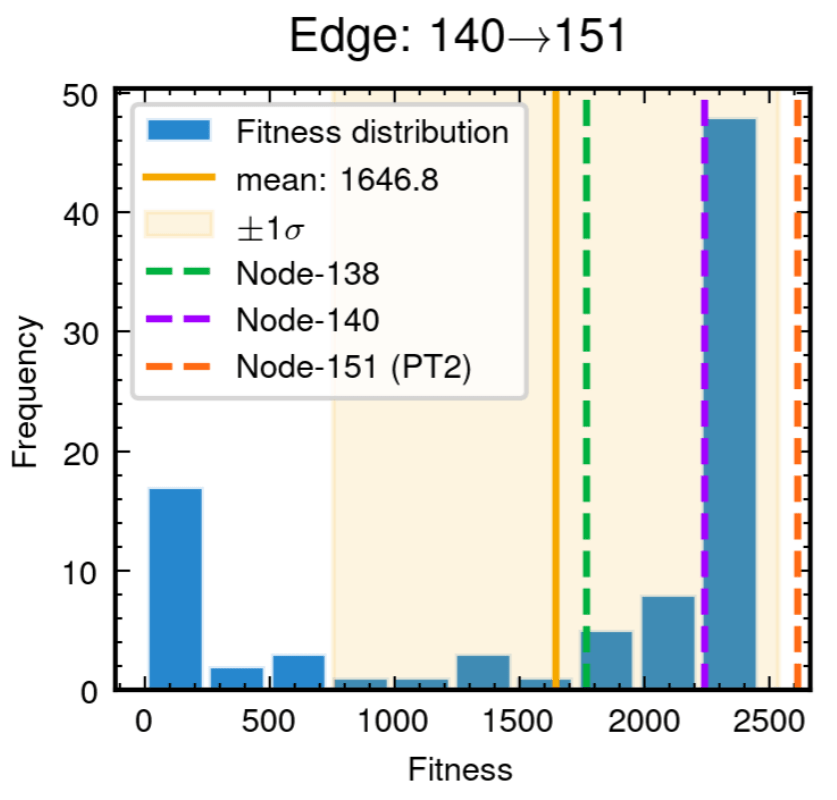
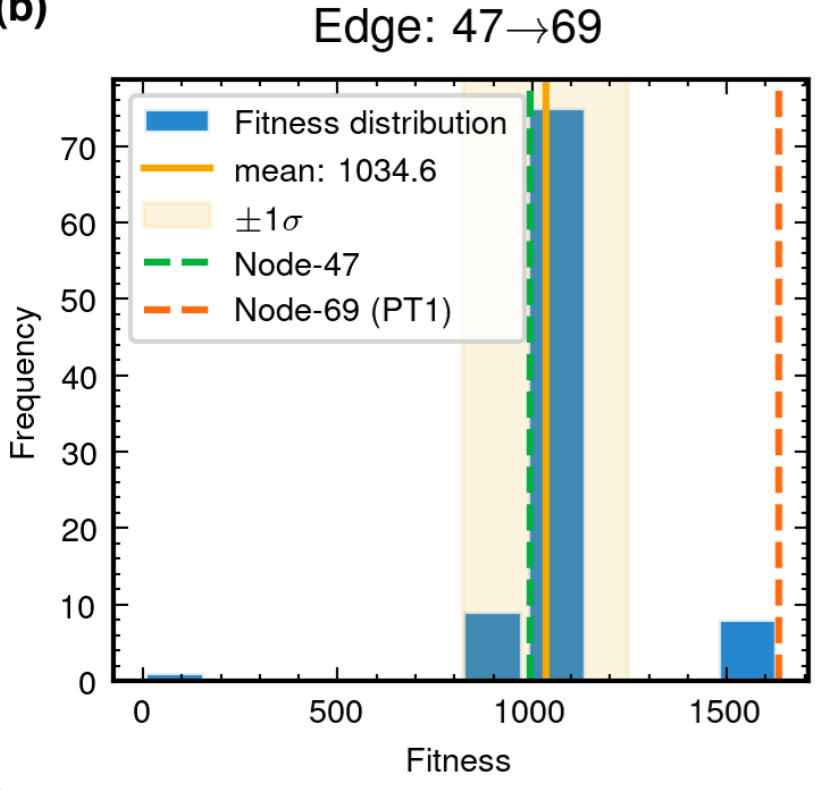
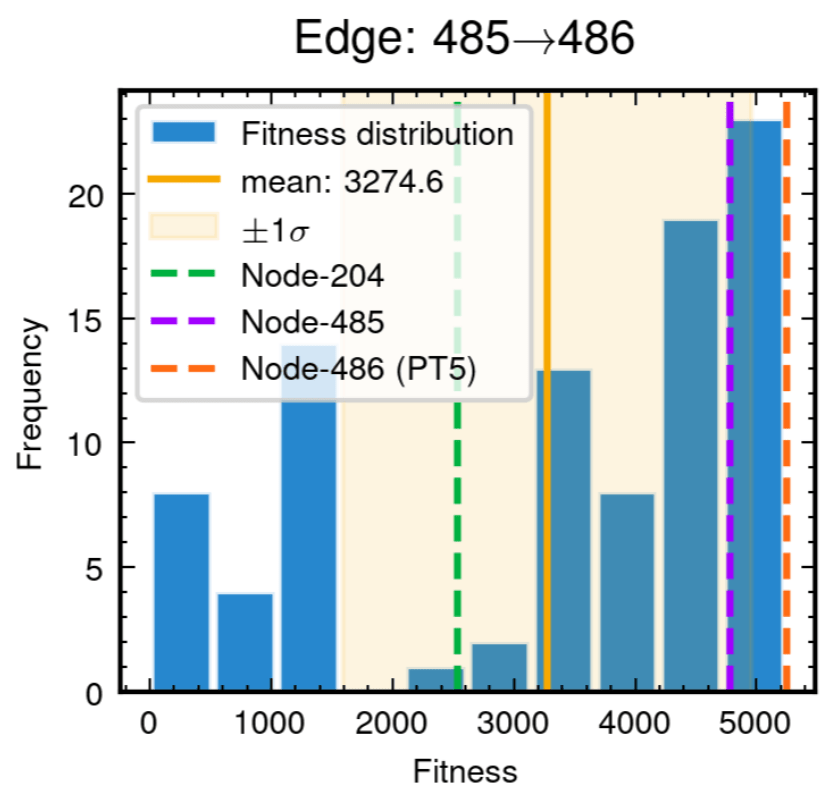
Edge robustness analysis for three critical evolutionary transitions.
- Confirming the consistent discovery
Interpretability Analysis
hewang@ucas.ac.cn
HW & ZL, arXiv:2508.03661
Edge robustness analysis for three critical evolutionary transitions.
- The distributions demonstrate the stochastic nature of LLM-driven code generation while confirming the consistent discovery of high-performance algorithmic variants.
AAD for GW detection Guided by LLM-informed Evo-MCTS
Interpretability Analysis
MCTS Algorithmic Evolution Pathway
- Complete MCTS tree structure showing all nodes associated with the optimal algorithm (node 486, fitness=5041.4).
hewang@ucas.ac.cn
HW & ZL, arXiv:2508.03661
AAD for GW detection Guided by LLM-informed Evo-MCTS
Framework Mechanism Analysis
Integrated Architecture Validation
- A comprehensive comparison of our integrated
Evo-MCTS framework against its constituent components operating in isolation.- Evo-MCTS: MCTS + Self-evolve + Reflection mech.
- MCTS-AHD: MCTS framework for CO.
- ReEvo: evolutionary framework for CO.
Contributions of knowledge synthesis
- Compare to w/o external knowledge
- non-linear vs linear only

hewang@ucas.ac.cn
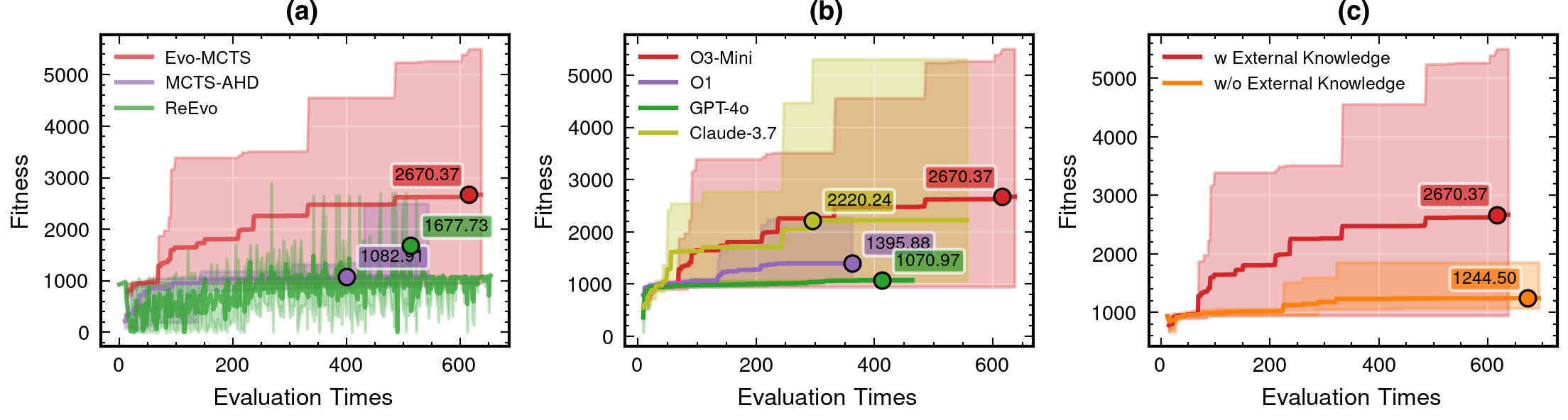
LLM Model Selection and Robustness Analysis
- Ablation study of various LLM contributions (code generator) and their robustness.
-
o3-mini-medium o1-2024-12-17 gpt-4o-2024-11-20claude-3-7-sonnet-20250219-thinking
-
HW & ZL, arXiv:2508.03661
59.1%
AAD for GW detection Guided by LLM-informed Evo-MCTS
115%
Framework Mechanism Analysis
Integrated Architecture Validation
- A comprehensive comparison of our integrated
Evo-MCTS framework against its constituent components operating in isolation.- Evo-MCTS: MCTS + Self-evolve + Reflection mech.
- MCTS-AHD: MCTS framework for CO.
- ReEvo: evolutionary framework for CO.
Contributions of knowledge synthesis
- Compare to w/o external knowledge
- non-linear vs linear only
hewang@ucas.ac.cn
HW & ZL, arXiv:2508.03661
59.1%
AAD for GW detection Guided by LLM-informed Evo-MCTS
### External Knowledge Integration
1. **Non-linear** Processing Core Concepts:
- Signal Transformation:
* Non-linear vs linear decomposition
* Adaptive threshold mechanisms
* Multi-scale analysis
- Feature Extraction:
* Phase space reconstruction
* Topological data analysis
* Wavelet-based detection
- Statistical Analysis:
* Robust estimators
* Non-Gaussian processes
* Higher-order statistics
2. Implementation Principles:
- Prioritize adaptive over fixed parameters
- Consider local vs global characteristics
- Balance computational cost with accuracy115%
hewang@ucas.ac.cn
Key Takeaways
AAD for GW detection Guided by LLM-informed Evo-MCTS
Interpretable AI Approach
The best of both worlds
Input
Physics-Informed
Algorithm
(High interpretability)
Output
Example: Our Approach
(Evo-MCTS)
AI Model
Physics
Knowledge
Traditional Physics Approach
Input
Human-Designed Algorithm
(Based on human insight)
Output
Example: Matched Filtering,
linear regression
Black-Box AI Approach
Input
AI Model
(Low interpretability)
Output
Examples: CNN, AlphaFold
Data/
Experience
Data/
Experience
🎯 OUR WORK
hewang@ucas.ac.cn
Key Takeaways
Any algorithm's design problem can be viewed as an optimization challenge
- Numerous intermediate processes in scientific data processing, like noise modeling and experimental design, can be classified as "algorithm optimization" problems
- Several analytical modeling techniques and "symbolic regression" methods in theoretical physics and cosmology can similarly be considered "algorithm optimization" issues
AAD for GW detection Guided by LLM-informed Evo-MCTS
hewang@ucas.ac.cn
for _ in range(num_of_audiences):
print('Thank you for your attention! 🙏')Acknowledgment:


AAD for GW detection Guided by LLM-informed Evo-MCTS
Key Takeaways
Interpretable AI Approach
The best of both worlds
Input
Physics-Informed
Algorithm
(High interpretability)
Output
Example: Our Approach
(Evo-MCTS)
AI Model
Physics
Knowledge
Traditional Physics Approach
Input
Human-Designed Algorithm
(Based on human insight)
Output
Example: Matched Filtering,
linear regression
Black-Box AI Approach
Input
AI Model
(Low interpretability)
Output
Examples: CNN, AlphaFold
Data/
Experience
Data/
Experience
🎯 OUR WORK
The Rise of LLMs: How Code Training Transformed AI Capabilities
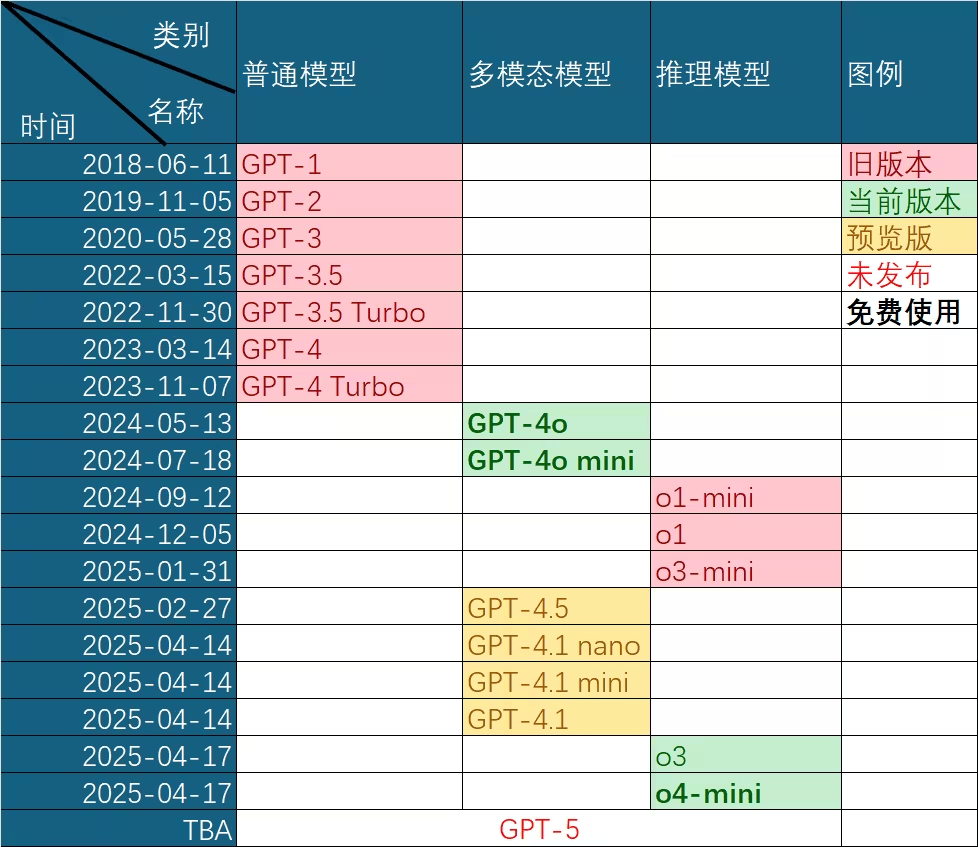
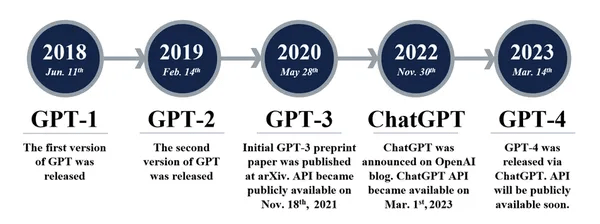
Evolution of GPT Capabilities
A careful examination of GPT-3.5's capabilities reveals the origins of its emergent abilities:
- Original GPT-3 gained generative abilities, world knowledge, and in-context learning through pretraining
- Instruction-tuned models developed the ability to follow directions and generalize to unseen tasks
- Code-trained models (code-davinci-002) acquired code comprehension
- The ability to perform complex reasoning likely emerged as a byproduct of code training
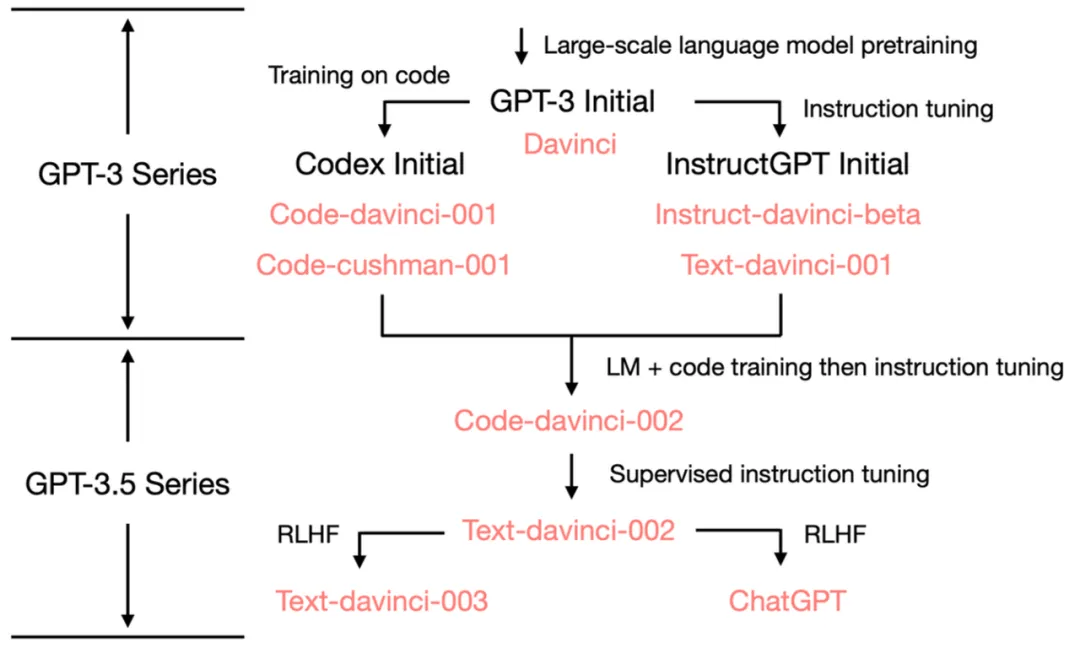
GPT-3.5 series [Source: University of Edinburgh, Allen Institute for AI]
GPT-3 (2020)
ChatGPT (2022)
Magic: Code + Text
Interpretable Gravitational Wave Data Analysis with DL and LLMs
Recent research demonstrates that LLMs can solve complex optimization problems through carefully engineered prompts. DeepMind's OPRO (Optimization by PROmpting) approach showcases how LLMs can generate increasingly refined solutions through iterative prompting techniques.
OPRO: Optimization by PROmpting
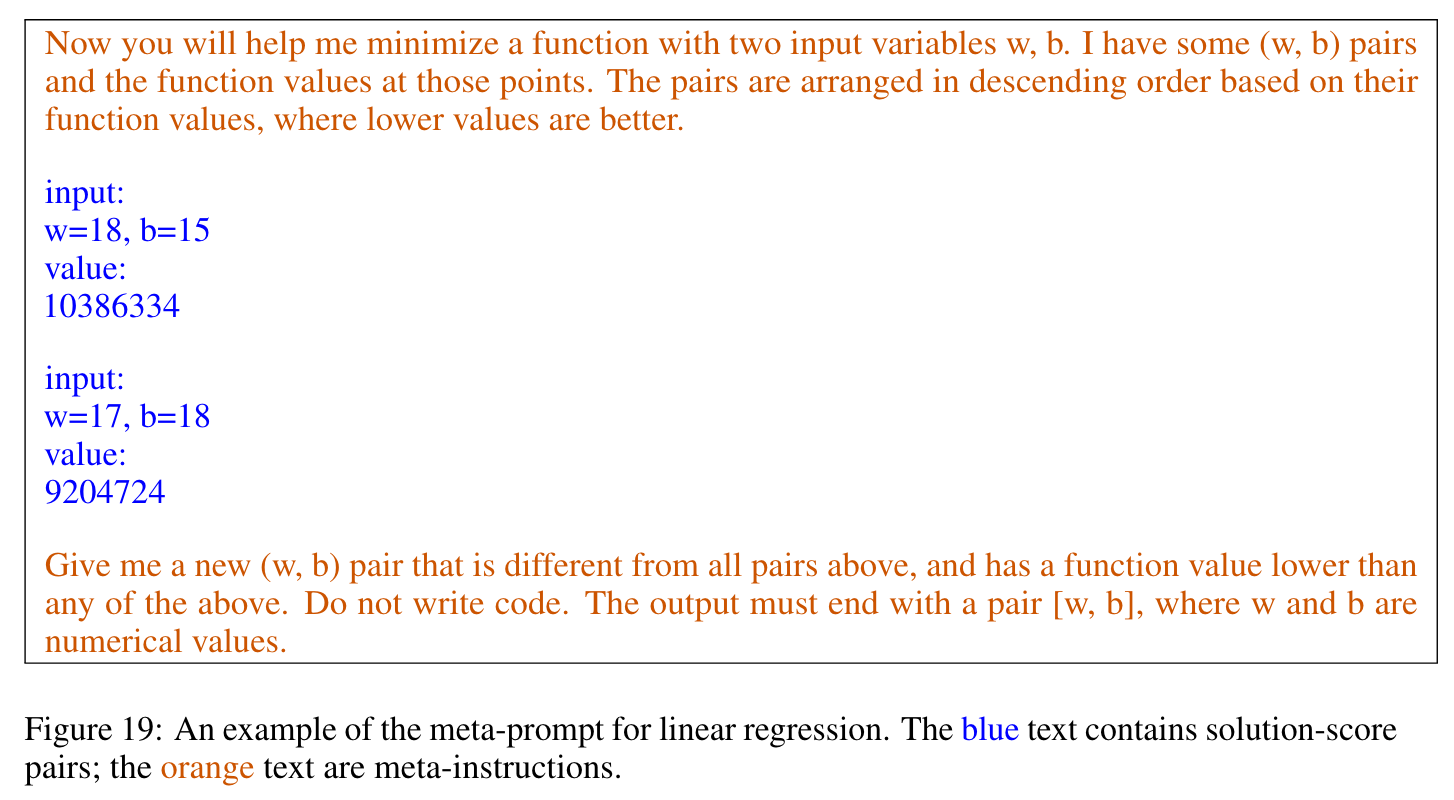
Example: Least squares optimization through prompt engineering
arXiv:2309.03409 [cs.NE]
Two Directions of LLM-based Optimization
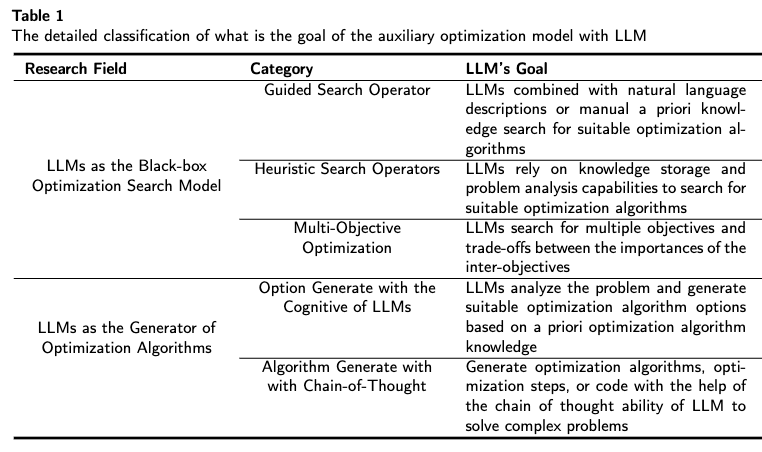
arXiv:2405.10098 [cs.NE]
The Optimization Potential of Large Language Models
LLMs can generate high-quality solutions to optimization problems without specialized training
Interpretable Gravitational Wave Data Analysis with DL and LLMs
Theoretical Understanding of LLMs' Emergent Abilities
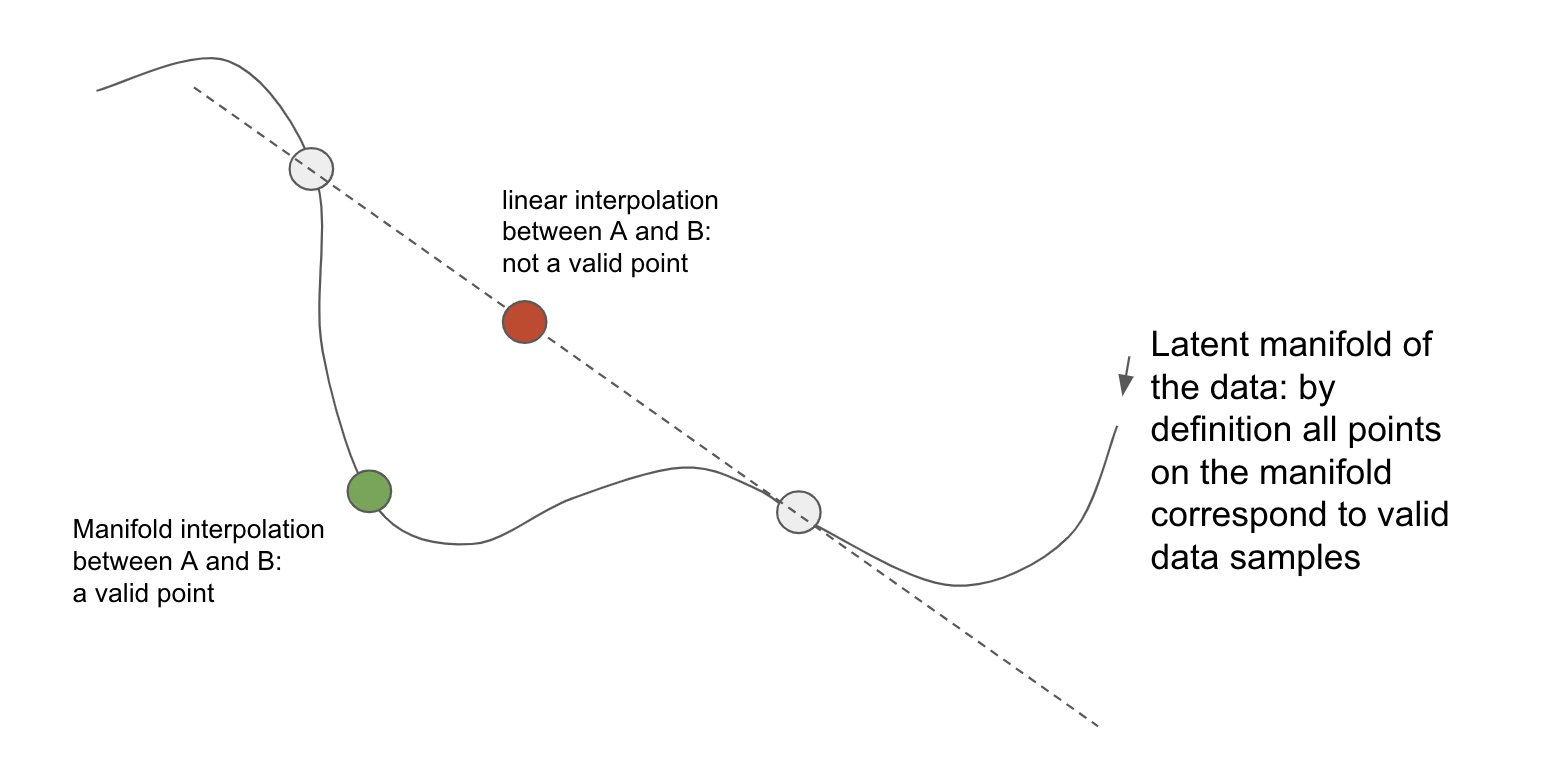
The Interpolation Theory
LLMs' ability to generate novel responses from few examples is increasingly understood as manifold interpolation rather than mere memorization:
- LLMs learn a continuous semantic manifold of language during pre-training
- Few-shot examples serve as anchor points in this high-dimensional space
- The model interpolates between examples to generate responses for novel inputs
- This enables coherent generalization beyond the training distribution
- The quality of interpolation improves with model scale and training data breadth
The theory suggests that in-context learning is not "learning" in the traditional sense, but rather a form of implicit conditioning on the manifold of learned representations.
Representation Space Interpolation
Interpretable Gravitational Wave Data Analysis with DL and LLMs
Theoretical Understanding of LLMs' Emergent Abilities
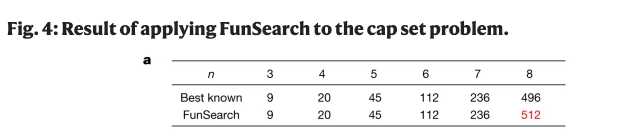
Real-world Case: FunSearch (Nature, 2023)
- Google DeepMind's FunSearch system pairs LLMs with evaluators in an evolutionary process
- Discovered new mathematical knowledge for the cap set problem in combinatorics, improving on best known bounds
- Also created novel algorithms for online bin packing that outperform traditional methods
- Demonstrates LLMs can make verifiable scientific discoveries beyond their training data
Interpretable Gravitational Wave Data Analysis with DL and LLMs