
Ihno Schrot — The Story Behind the Professional — December 16th 2025
MY CV
2013 - 2017
Bachelor
Mathematics
Internship
2016
Consultant
2017

Student Assistant
2017
2017 - 2019
Master Scientific
Computing
2019 - 2025
PhD
Numerical
Optimization

Scientist for Optimization Algorithm Development
since 2025

Ihno Schrot — The Story Behind the Professional — December 16th 2025
BACHELOR STUDIES
2013 - 2017 Bachelor Mathematics
PDEs and Cellular Automata for Modelling Inflammatory Processes
Thesis

Integer and Linear Programming
Focus
Physics
Minor
Ihno Schrot — The Story Behind the Professional — December 16th 2025
DEUTSCHES ZENTRUM FÜR LUFT- UND RAUMFAHRT
2016/2017 Internship and Student Assistant
Integer
(and a bit Dynamic) Programming
Focus
Algorithms for Dial-a-Ride Problems for the "Reallabor Schorndorf"
Student Assistant

Traffic Light Algorithms
Internship

Ihno Schrot — The Story Behind the Professional — December 16th 2025
SIDEWALK LABS
2017 Consultant
Evaluation and Presentation
Focus
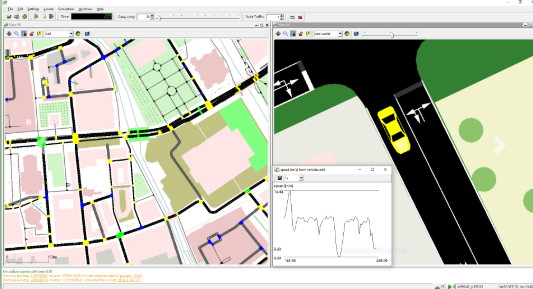
Improving Urban Infrastructure Through Technological Solutions
Purpose

Traffic Light Algorithms
V2X-Communication
Platooning
Traffic Simulations

Ihno Schrot — The Story Behind the Professional — December 16th 2025
PHD STUDIES
2019 - 2025 PhD Numerical Optimization
Application

Algorithms

Theory

Teaching


Ihno Schrot — The Story Behind the Professional — December 16th 2025
MOTIVATION FOR MY PHD PROJECT
Bildquellen: jcomp, bzw. rawpixel.com, auf Freepik
Adaptive Cruise Control (ACC)
- Driving Assistance System
- Cruise Control + Distance Control

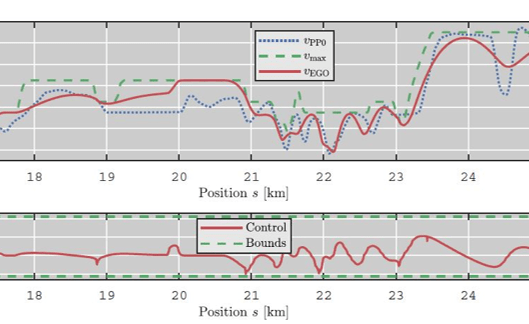
Ecological ACC (EACC)
- Vary distance to preceding vehicle (PP0)
- Leverage traffic and route data \(\rightarrow\) Save energy
\(\rightarrow\) Nonlinear Model Predictive Control (NMPC)
- Handling tabulated data and external inputs
- Limited computational power of onboard hardware
Challenges for Numerical NMPC Methods
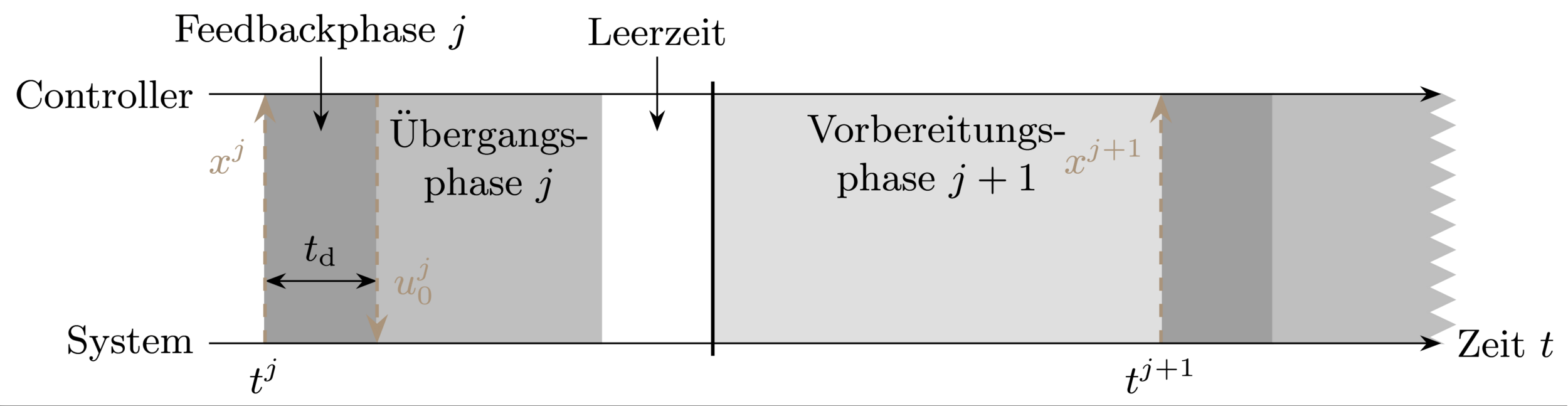
NONLINEAR MODEL PREDICTIVE CONTROL (NMPC)
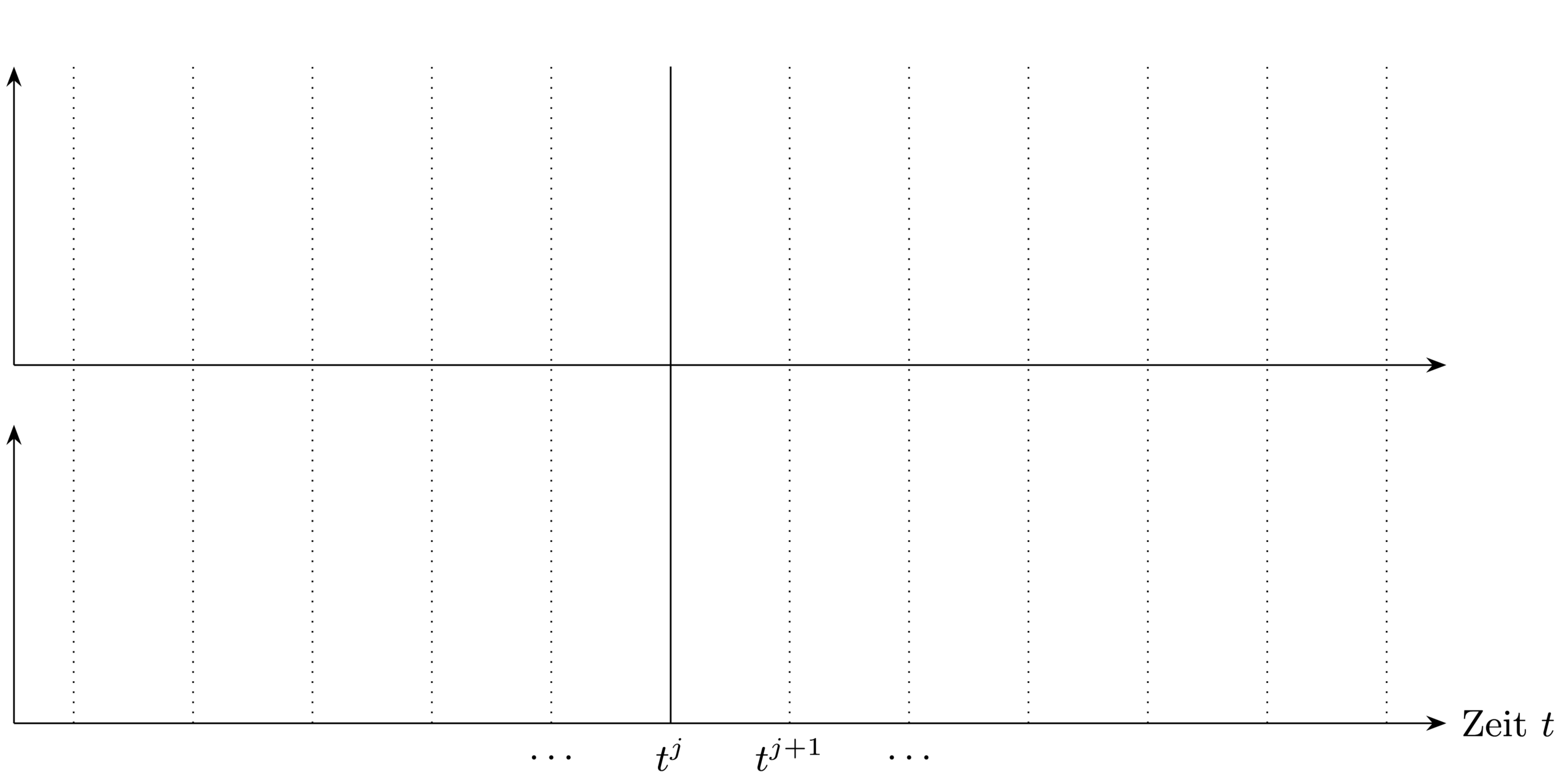
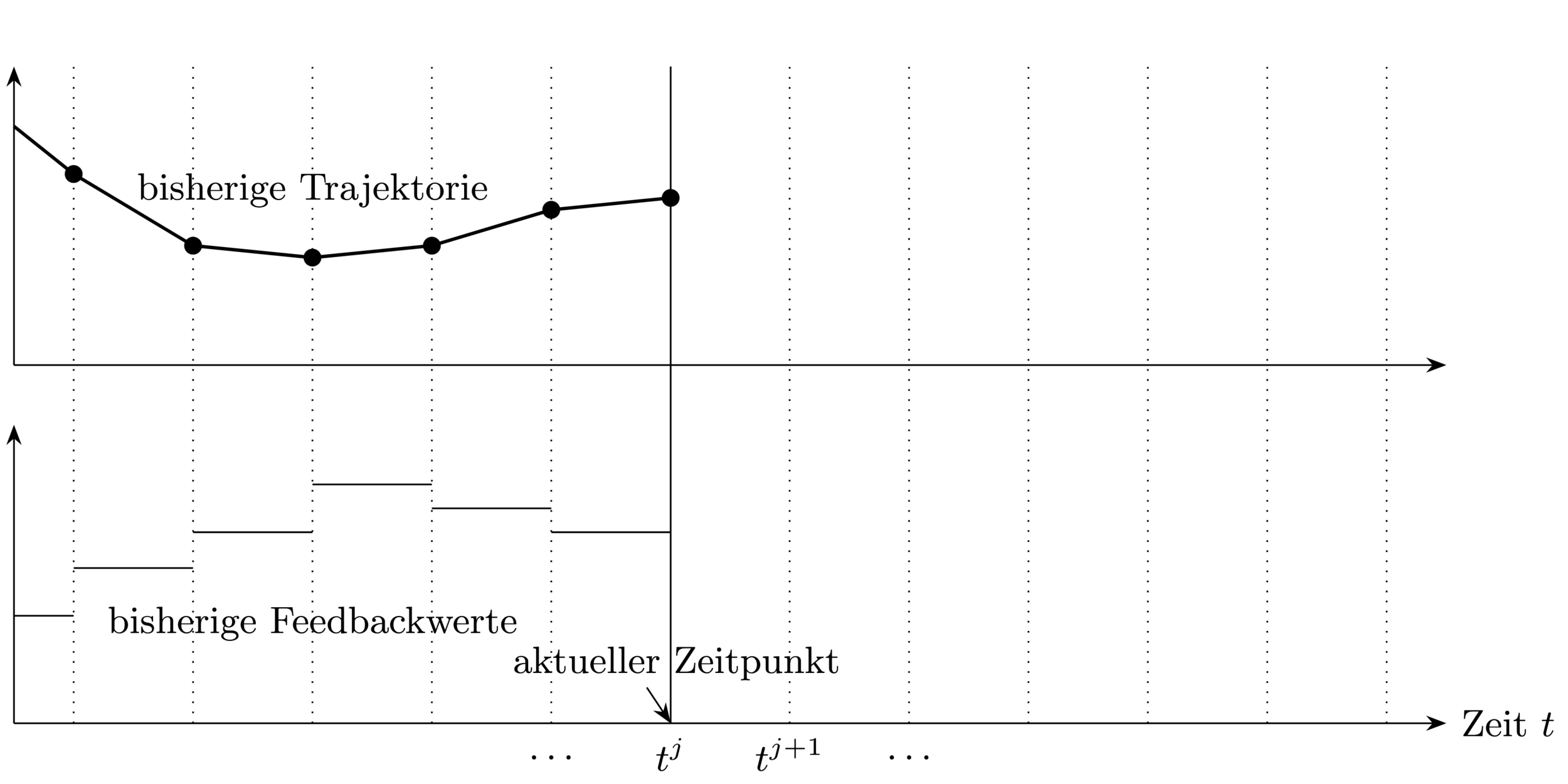
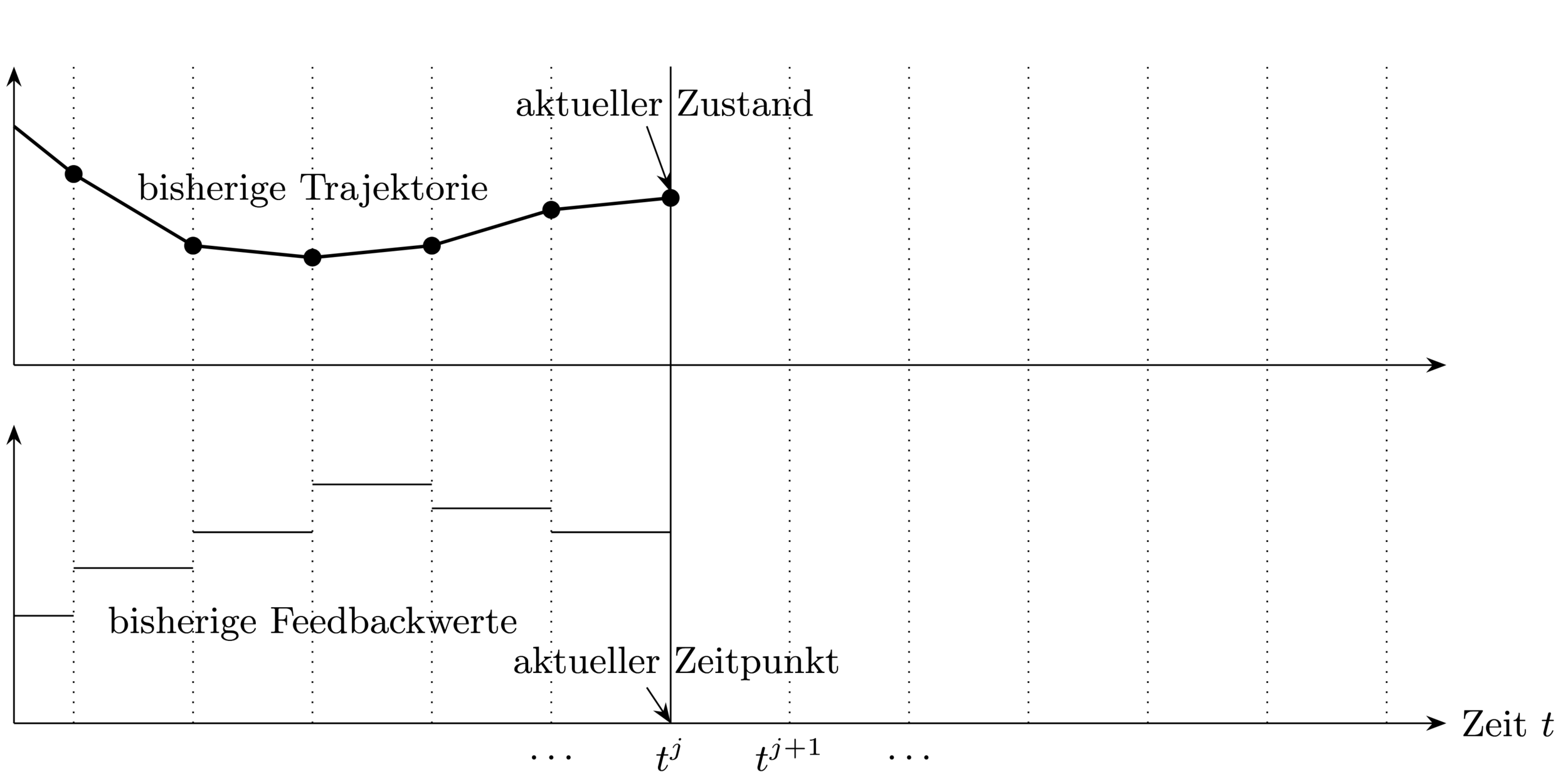
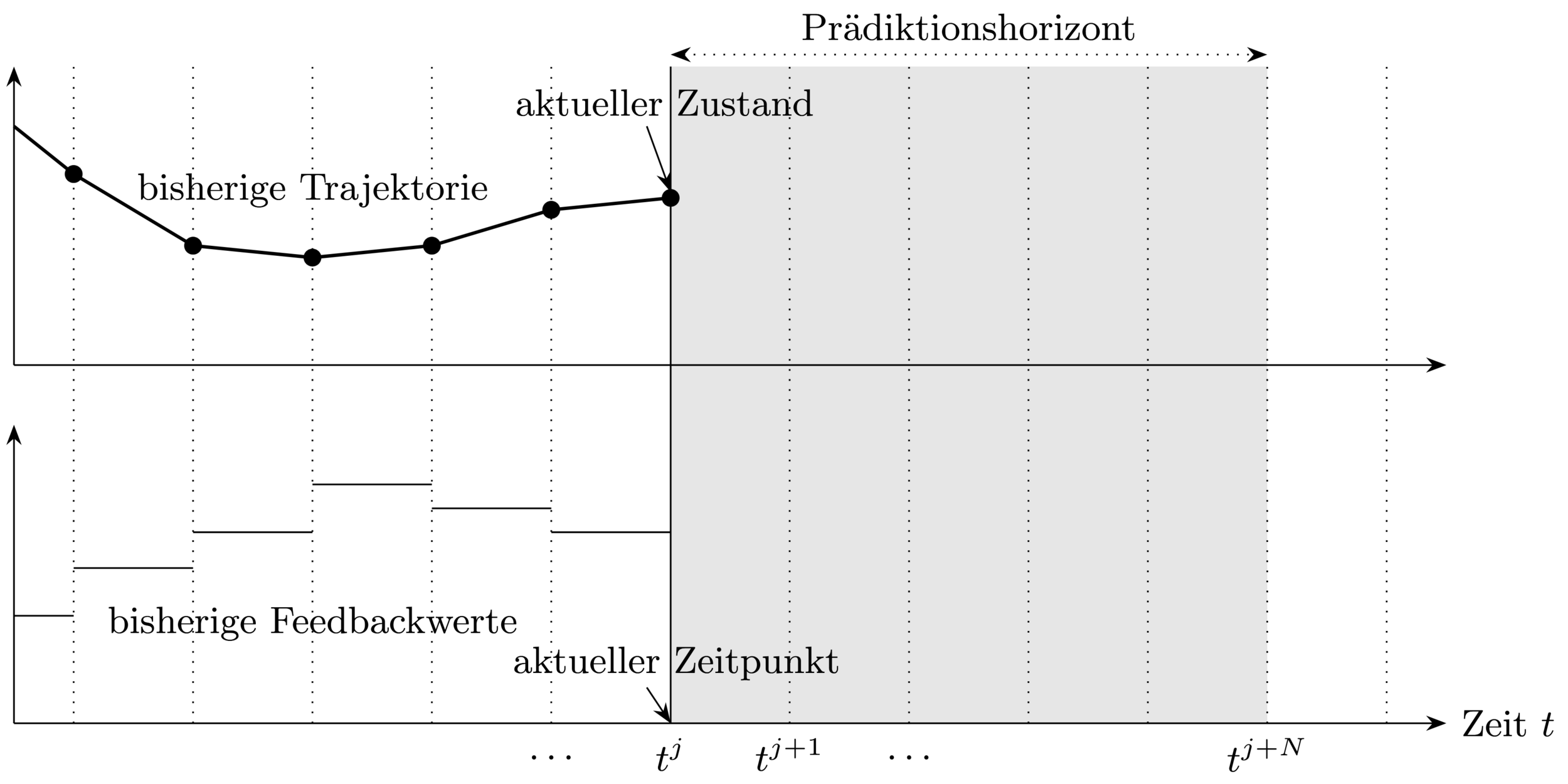
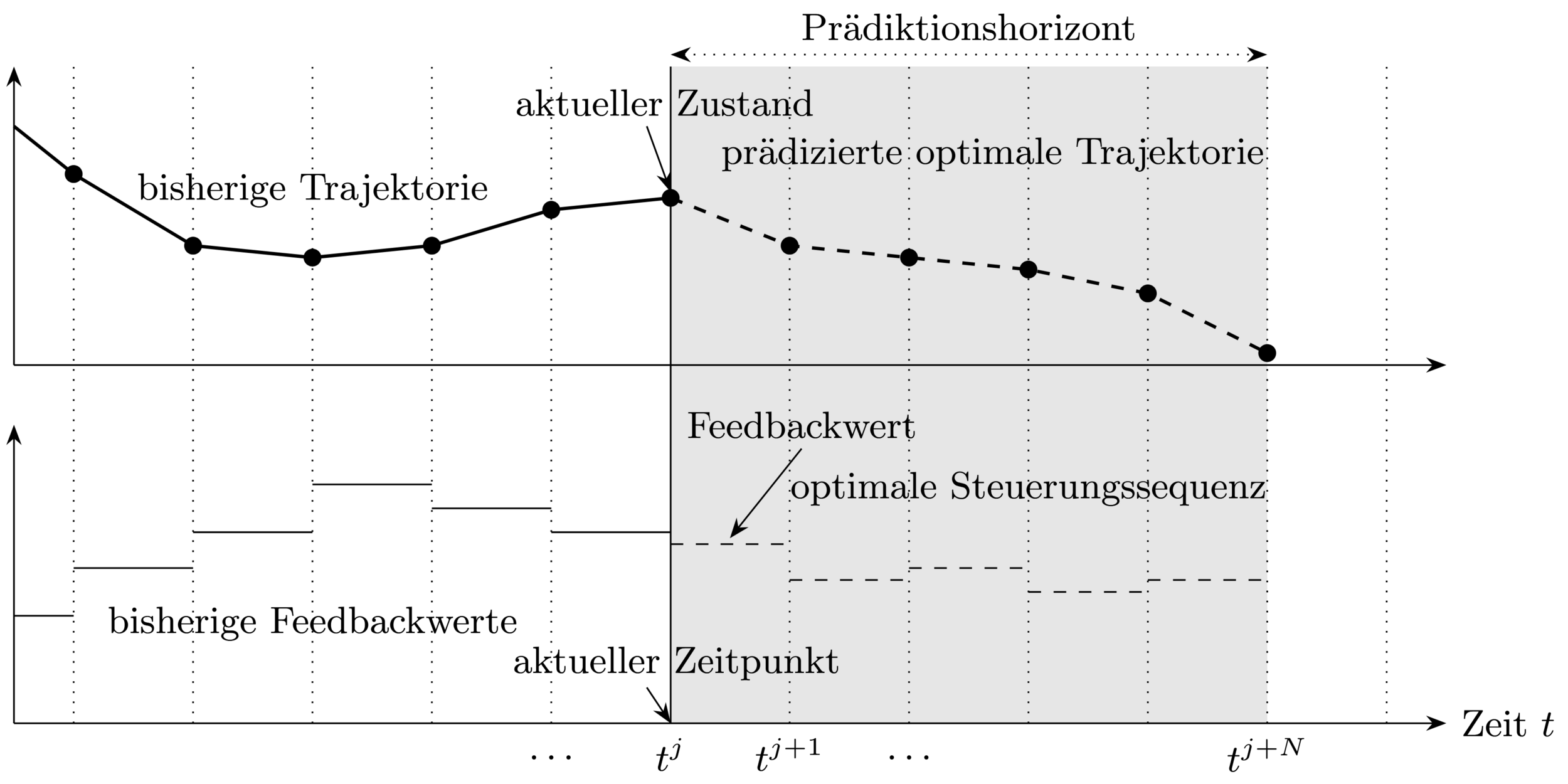
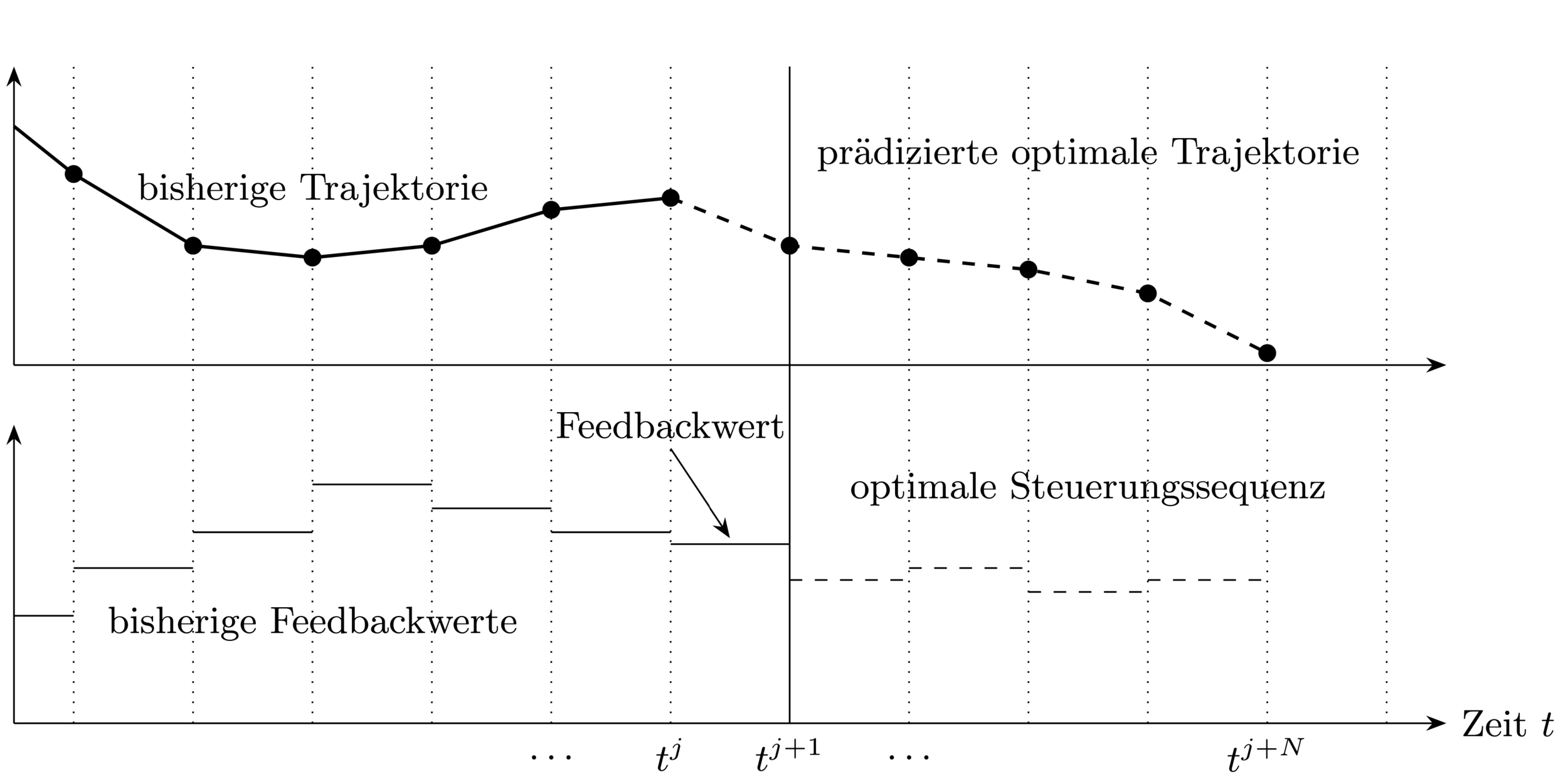
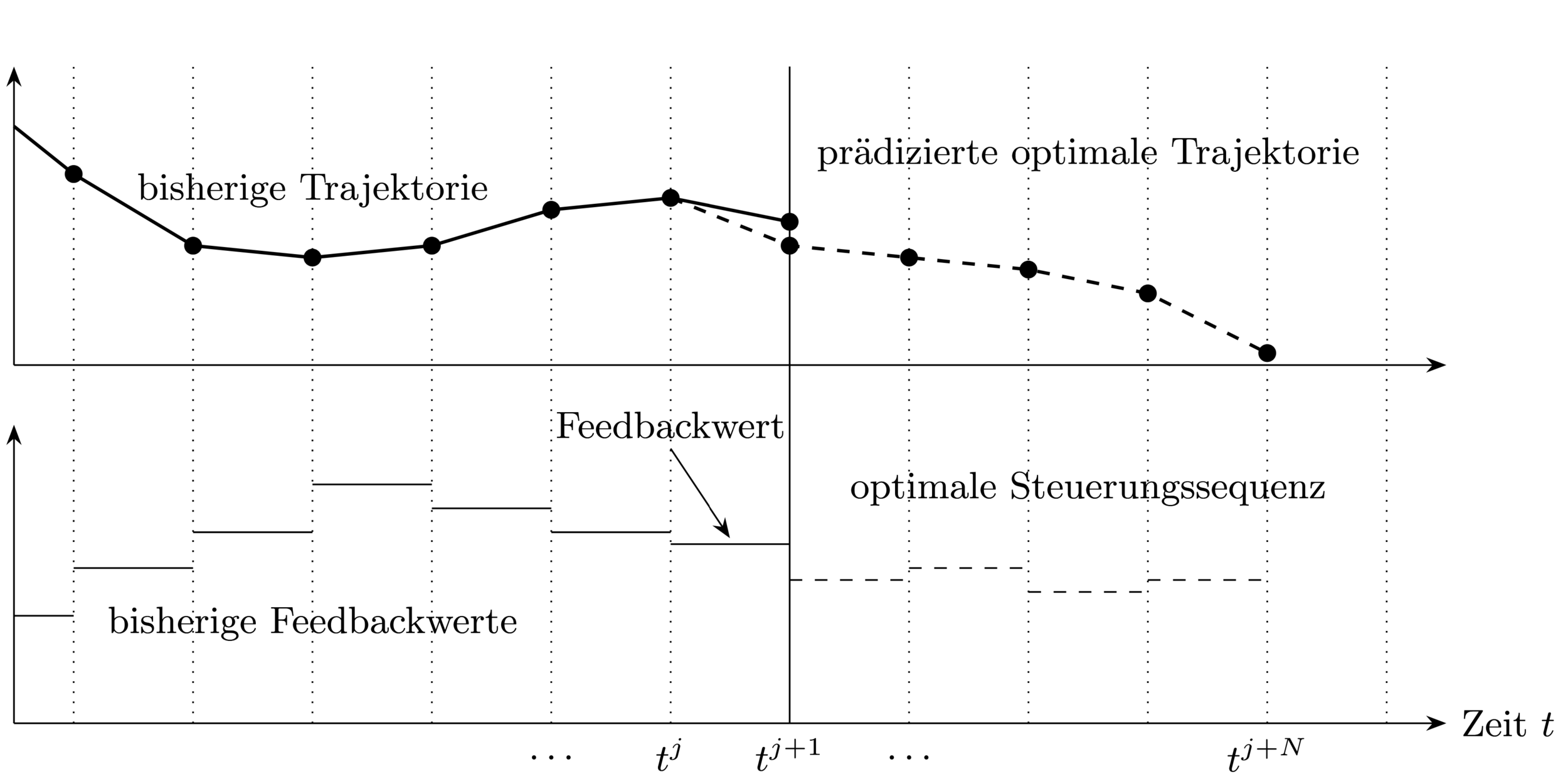
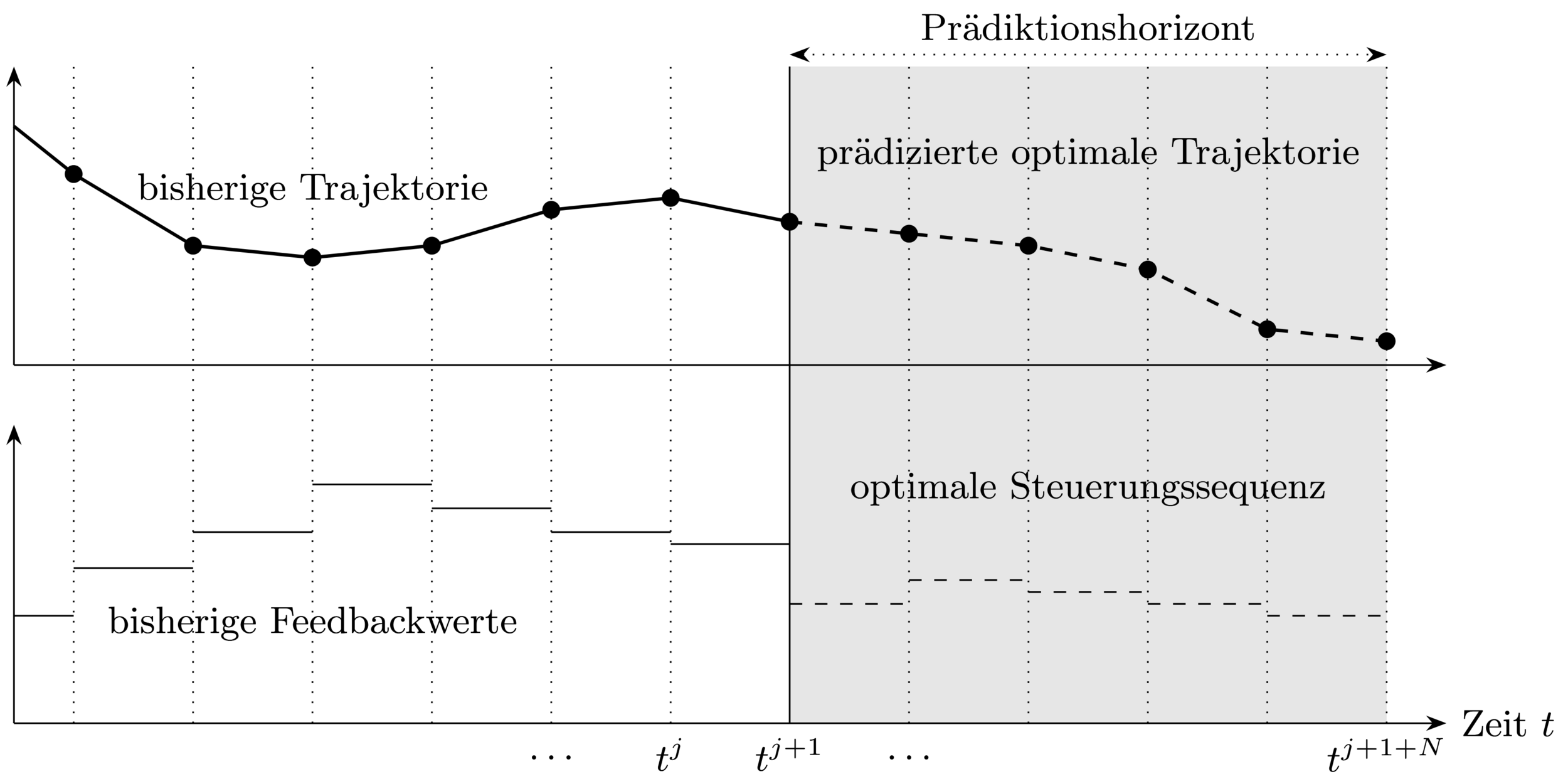
At each sampling time point:
1. Get current state
3. Use feedback value until next
sampling time point
2. Solve optimal control problem (OCP) over
prediction horizon
Closed-loop Control Strategy \(\rightarrow\) allows to react to disturbances
Ihno Schrot — The Story Behind the Professional — December 16th 2025
FRAMEWORK TO EFFICIENTLY SOLVE PARAMETRIZED OCPS
State
and
Control
Running and terminal costs
ODE model
Mixed state and control constraints
+
boundary conditions
Modelling
Ihno Schrot — The Story Behind the Professional — December 16th 2025
State
and
Control
Running and terminal costs
ODE model
FRAMEWORK TO EFFICIENTLY SOLVE PARAMETRIZED OCPS
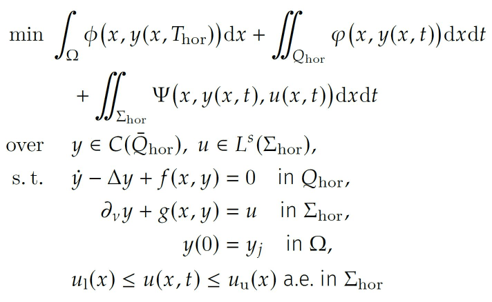
\(\infty\) - dimensional OCP
Modelling
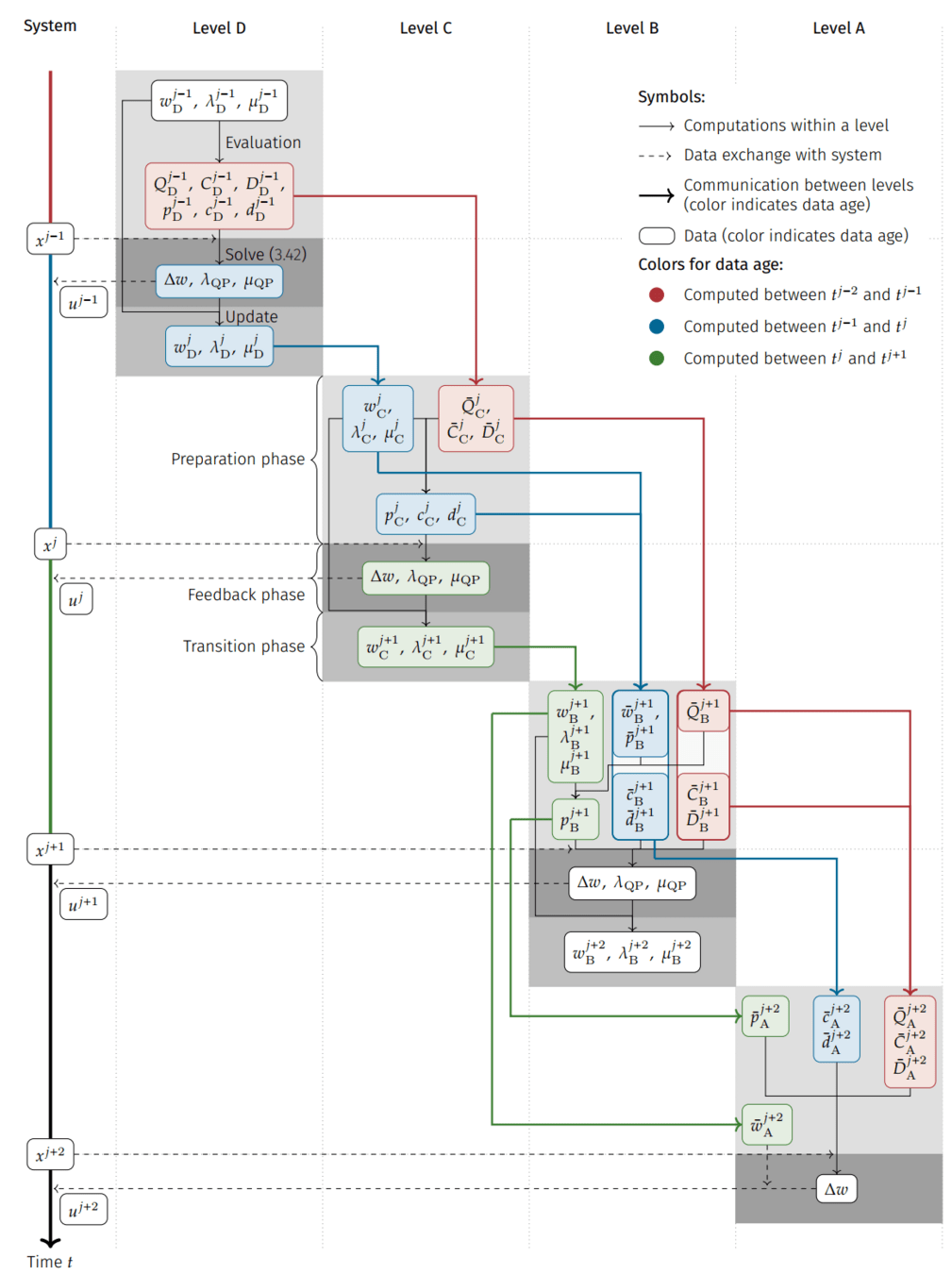
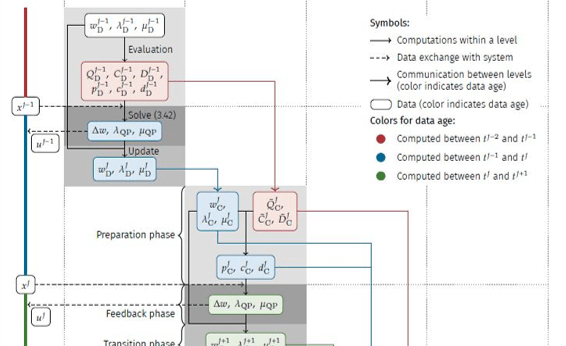
Multi-Level Iterations (MLI)
[Wirsching, 2018]
Real-Time Iterations (RTI)
[Diehl et. al, 2002]
Nonlinear Program (NLP)
Direct Multiple Shooting (DMS)
[Bock, Plitt 1984]
- [Bock, Plitt, 1984] H. G. Bock and K. J. Plitt. “A Multiple Shooting Algorithm for Direct Solution of Optimal Control Problems”. In: IFAC Proceedings Volumes 17.2 (1984). 9th IFAC World Congress: A Bridge Between Control Science and Technology, Budapest, Hungary, 2-6 July 1984, pp. 1603–1608
- [Diehl et. al., 2002] M. Diehl, H. G. Bock, J. P. Schlöder, R. Findeisen, Z. Nagy, and F. Allgöwer. “Real-time optimization and nonlinear model predictive control of processes governed by differential-algebraic equations”. In: Journal of Process Control 12.4 (2002), pp. 577–585
- [Wirsching, 2018] L. Wirsching. “Multi-level iteration schemes with adaptive level choice for nonlinear model predictive control”. PhD thesis. Heidelberg University, 2018
Quadratic Program (QP)
Tailored
SQP-Method
Ihno Schrot — The Story Behind the Professional — December 16th 2025
MULTIPLE SHOOTING DISCRETIZATION
- [Bock, Plitt, 1984] H. G. Bock and K. J. Plitt. “A Multiple Shooting Algorithm for Direct Solution of Optimal Control Problems”. In: IFAC Proceedings Volumes 17.2 (1984). 9th IFAC World Congress: A Bridge Between Control Science and Technology, Budapest, Hungary, 2-6 July 1984, pp. 1603–1608
Ihno Schrot — The Story Behind the Professional — December 16th 2025
-
Introduce Shooting Grid
-
Replace state trajectory by points
-
Replace control trajectory by, e.g., piecewise constant controls
-
Introduce Matching Conditions
- Constraints and objective functions are evaluated only at shooting nodes
Control $$u(\cdot)$$
Infinite-Dimensional
State $$x(\cdot)$$
SEQUENTIAL QUADRATIC PROGRAMMING
Ihno Schrot — The Story Behind the Professional — December 16th 2025
Nonlinear System of Equations
SQP Method
Step of Newton's Method
Optimality Conditions
Quadratic Approximation
Quadratic Program
Step $$\Delta x$$
Current Guess $$x_k$$
Solving the QP
Update
FOCUS OF MY THESIS
Ihno Schrot — The Story Behind the Professional — December 16th 2025
Application:
EACC
-
Realistic test problem with
real look-up tables and driving data -
Numerical tests

Stability
of
Inexact NMPC
-
OCP semilinear parabolic PDEs
-
Proof of asymptotic stability
of system-optimizer-dynamics
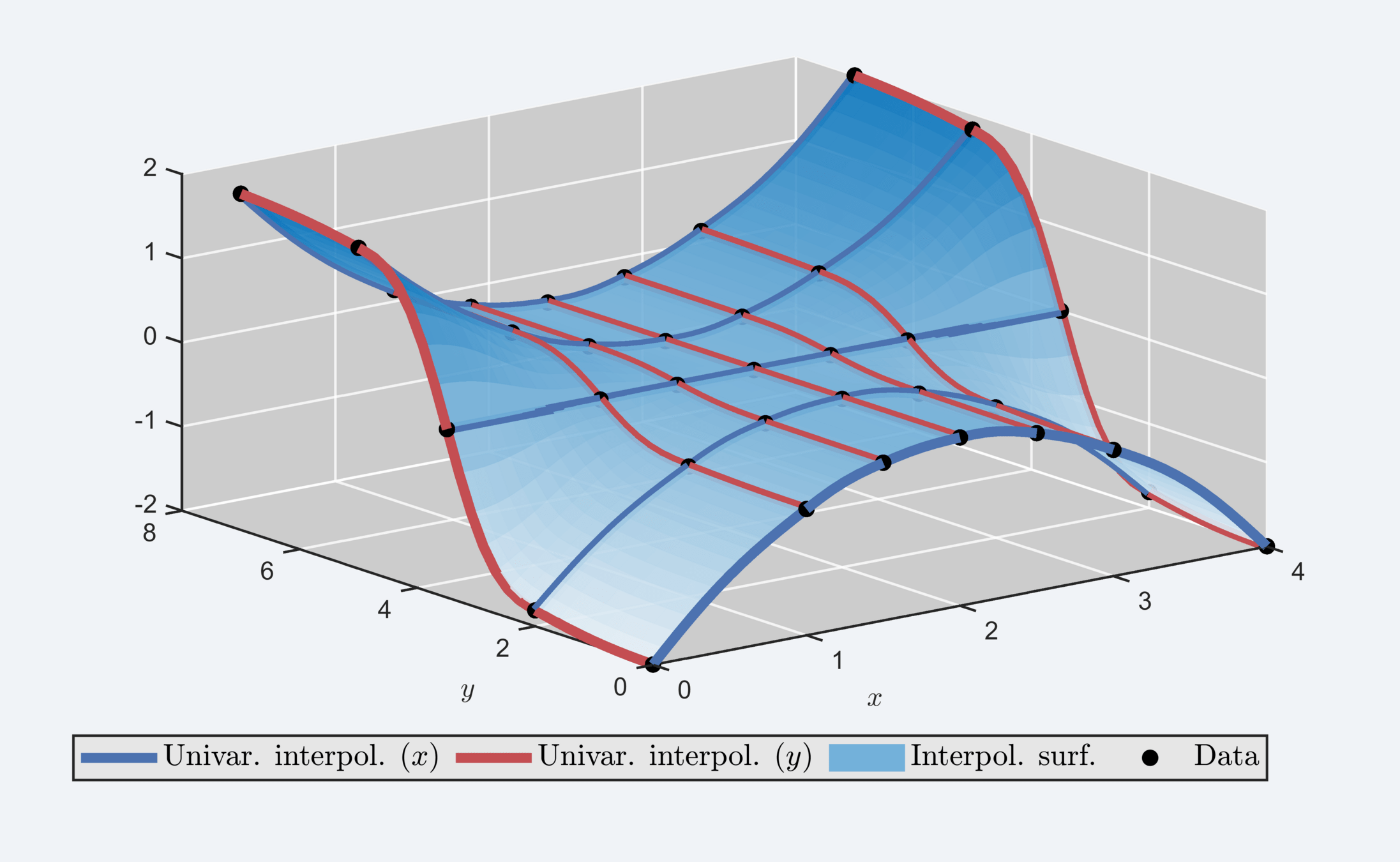
Shape-
Preserving
Interpolation
-
Classification for multivariate case
-
Method for multivariate, shape-preserving, smooth interpolation
Incorporate external inputs in
- DMS
- RTI
- MLI
External
Inputs
-
Scenario-based online feedback
-
Online effort: matrix-vector-product or QP-solve
SensEIS
FEEDBACK
OUTSIDE OF WORK

Mountains

More Sports
Tennis
Ihno Schrot — The Story Behind the Professional — December 16th 2025