Electronic project
GROUP G10B
S. JI, M. MA, A. OBERTELLI, V. OSTERTAG, V. SCHAEFER, A. VERVAET
2018 PROMO
2nd SEMESTER, JUNE 2016
Presentation's PLAN
- Introduction
- Understanding how the robot works
- Analysing sound signals
- Programming the robot
- Creating the captors for the robot
- Conclusion
Group G10B - ELECTRONIC PROJECT
Slide 1.2

INTRODUCTION
Group G10B - ELECTRONIC PROJECT
Slide 1.3

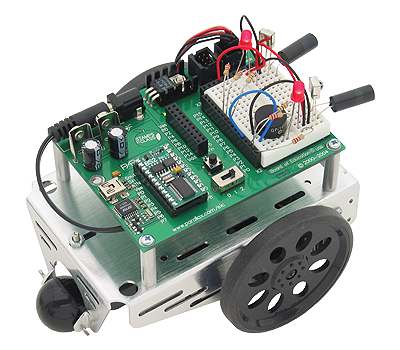
Our goal was to create a robot capable of observing its environment
Start moving when it hears a two tone whistle
Move around a 20 by 60 cm rectangle
Stop moving when receiving a high temperature or when pushing a stop button
A challenging part was to have an international
group. We had a language barrier as well as different thinking methods.
Understanding how the robot works
Group G10B - ELECTRONIC PROJECT
Slide 2.1
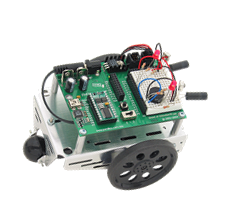
Understand how the robot works
Some of the main components
Group G10B - ELECTRONIC PROJECT
Slide 2.2
Cyclone III processor

4MB flash memory

7 segments display

USB Blaster

10 switches
SDRAM 8 Mbytes
Understand how the robot works
CONSUMING
Group G10B - ELECTRONIC PROJECT
Slide 2.3

FPGA works at 5V
What we know
Understand how the robot works

To find the power, we must measure the current
Measured current : 0.15A

We know that:
P = U x I
P = 0.75W
Group G10B - ELECTRONIC PROJECT
Slide 2.4
Understand how the robot works
CONSUMING
What we know
P = 0.75 W
W=P*∆t
1kWh = 0.09 kg of CO2
During one hour :
W = (0.75/1000)*1
= 7.5*10^-4 kWh
Equivalent in CO2 :
6.75*10^-5 kg
Group G10B - ELECTRONIC PROJECT
Slide 2.5
Understand how the robot works
BATTERY
Powered by 4 lithium cells
Boe-Bot uses 0.15 A
T = (Battery / U) = 19H
ANALYSING sound signals
Group G10B - ELECTRONIC PROJECT
Slide 3.1
Analysing sound signals


Problem A
Group G10B - ELECTRONIC PROJECT
Slide 3.2
Analysing sound signals
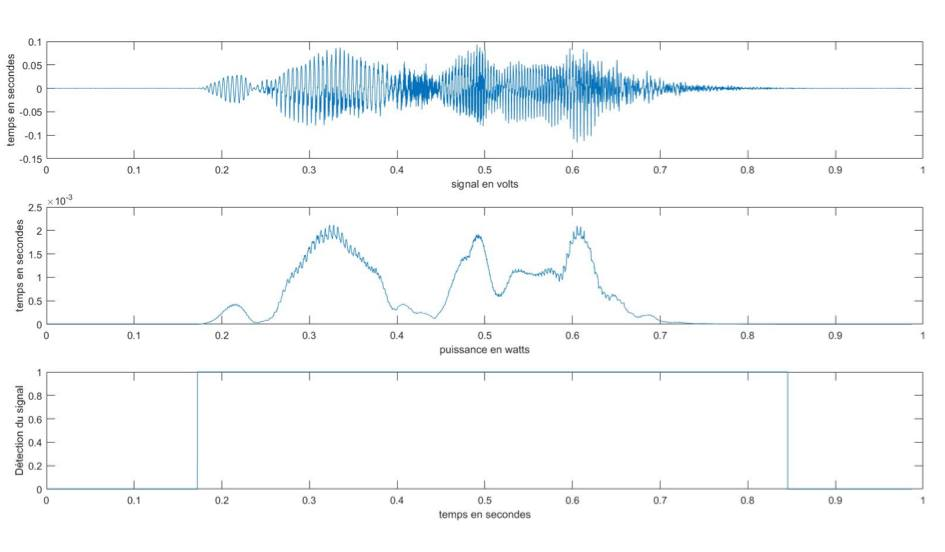
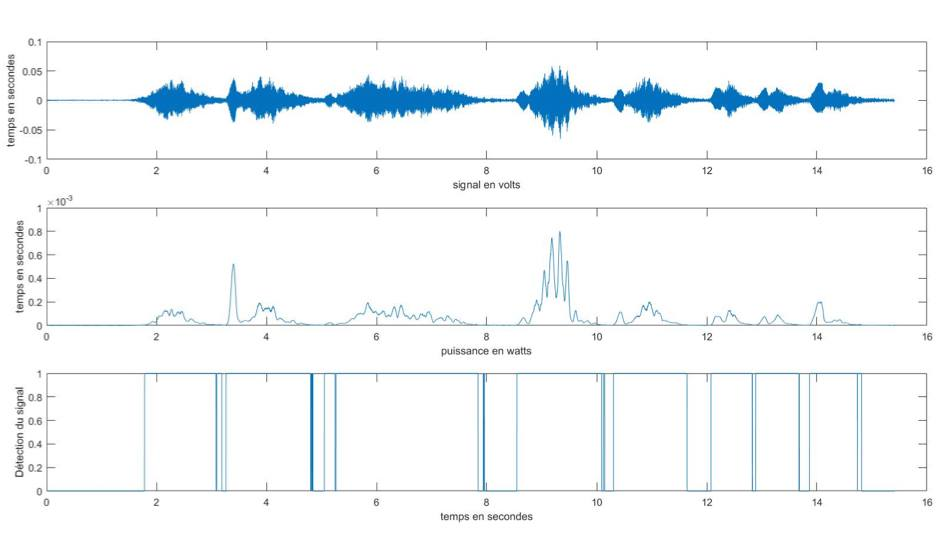
Create an algorithm which detects the presence of absence of an audio signal
1
Finding where it is stationary
2
Calculating powers
3
Using it to determinate where the audio is
Problem A
Group G10B - ELECTRONIC PROJECT
Slide 3.3
Analysing sound signals
Problem A
Group G10B - ELECTRONIC PROJECT
Slide 3.4
Analysing sound signals
Problem b
Group G10B - ELECTRONIC PROJECT
Slide 3.5
Analysing sound signals
Finding the notes played in a signal
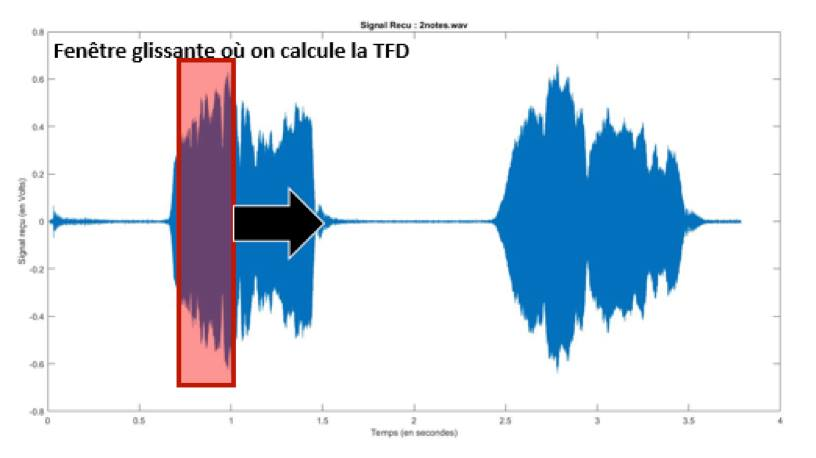
1
Calculating the Fourier transformation for each point
2
Finding the primal frequency and time of each point
Problem b
Group G10B - ELECTRONIC PROJECT
Slide 3.6
Analysing sound signals
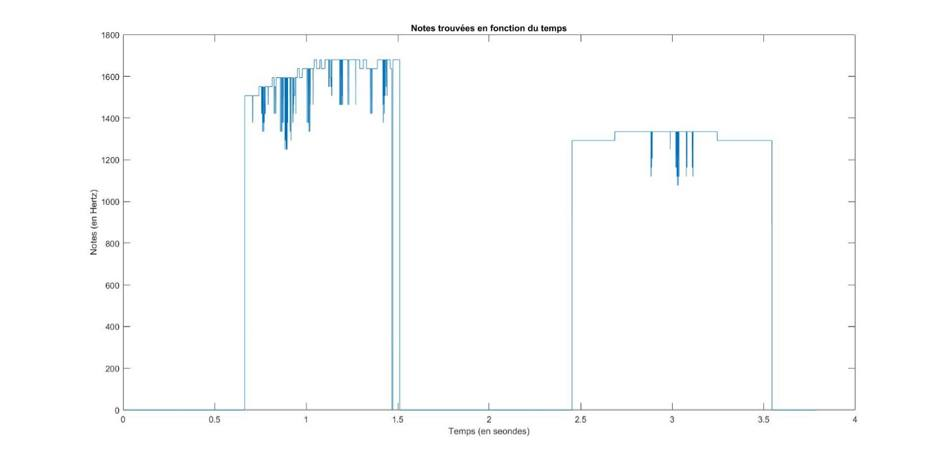
1611 Hz et 1311 Hz
1589Hz et 1281Hz
Problem C
Group G10B - ELECTRONIC PROJECT
Slide 3.7
Analysing sound signals
Reducing the memory used to numerise a signal

We lost a little bit of precision but so much memory place.
Problem D
Group G10B - ELECTRONIC PROJECT
Slide 3.8
Analysing sound signals
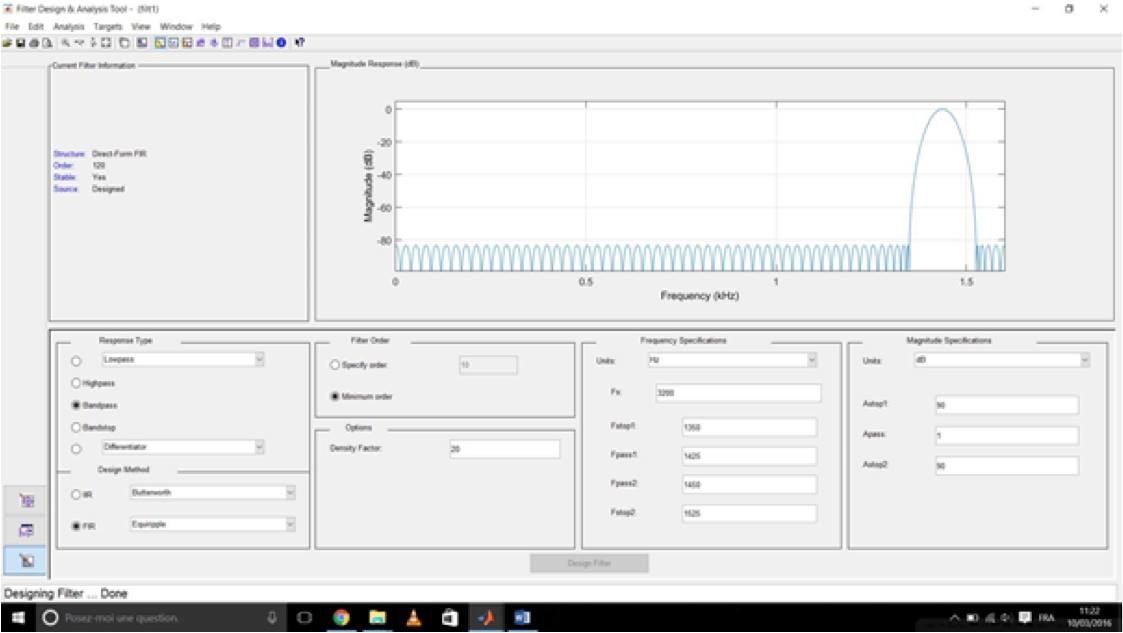
Creating a filter on Matlab
Problem D
Group G10B - ELECTRONIC PROJECT
Slide 3.9
Analysing sound signals
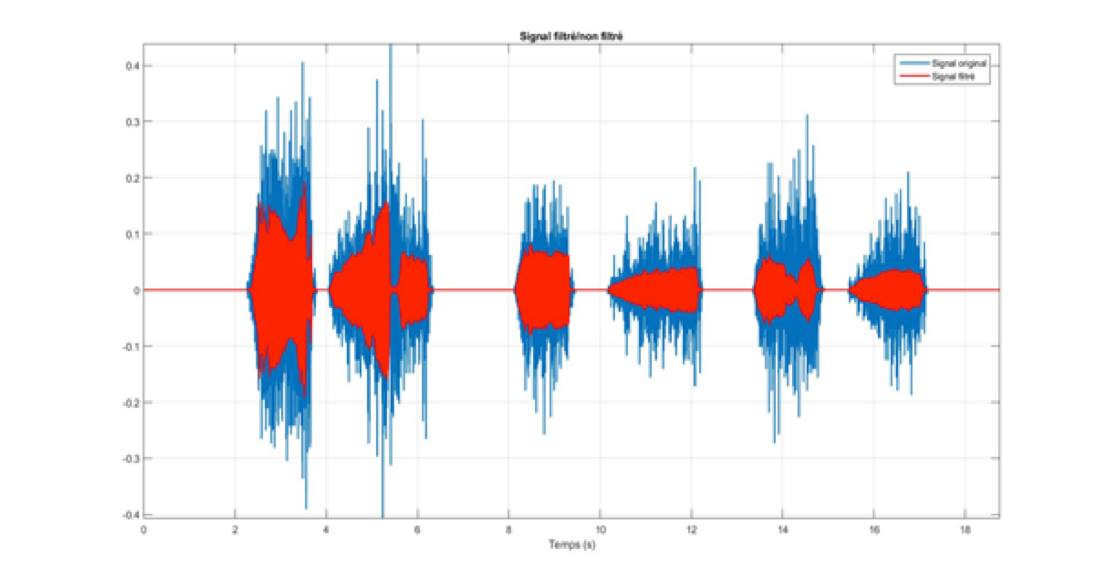
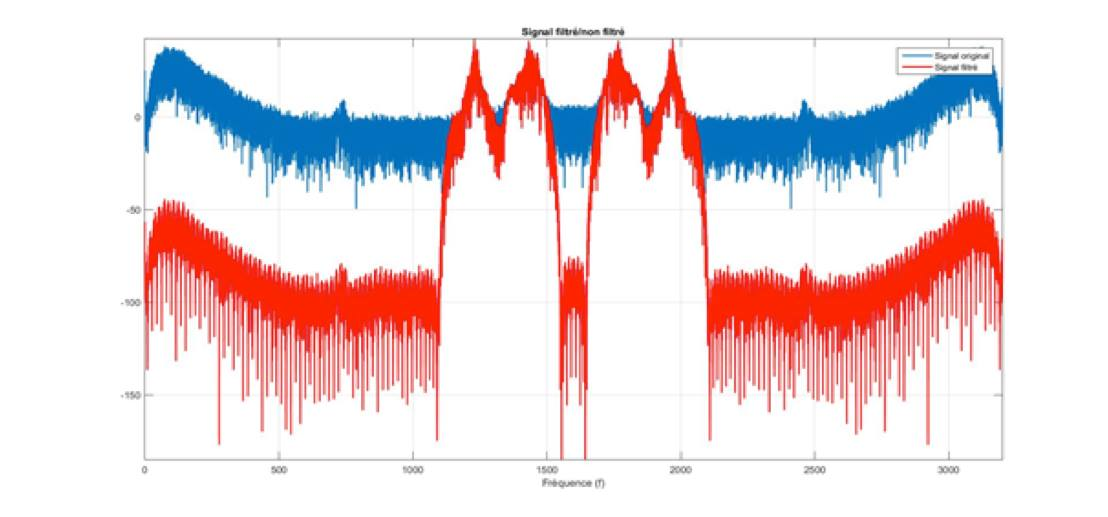
BEFORE
AFTER
PROGRAMMING THE ROBOT
Group G10B - ELECTRONIC PROJECT
Slide 4.1
Programming the robot


001010100011
110101111000
Objectives of this part
Group G10B - ELECTRONIC PROJECT
Slide 4.2
This part aims at programming the robot. We had to:
- Lean how to program in VHDL
- Learn how to use QUARTUS II
Here are the programs we coded:
Programming the robot
Group G10B - ELECTRONIC PROJECT
Slide 4.3
Quartus II

It's a software used to program any ALTERA product such as the Boe-Bot Robot

There are two ways to tell the device what to do.
- Using a diagram
- Coding in VHDL

VHDL is a language used to control the behavior of an electronic device.
Programming the robot
Group G10B - ELECTRONIC PROJECT
Slide 4.4
Quartus II
Programming the robot
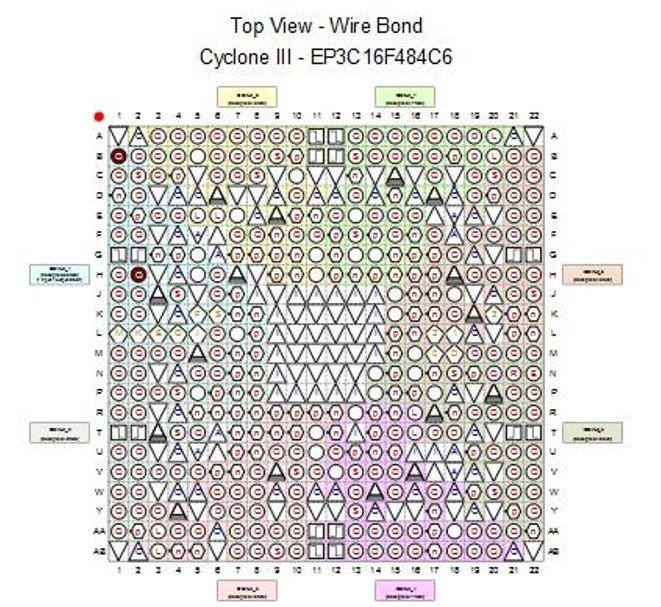
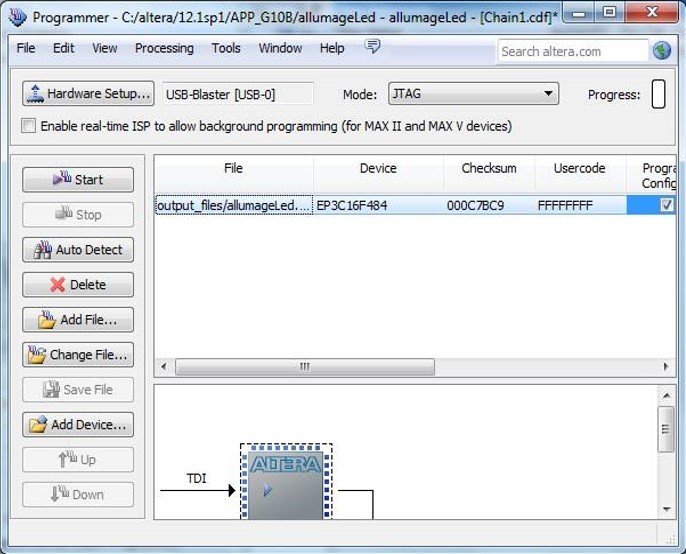
PINNING THE COMPONENTS
IMPLEMENT THE CODE ON THE ROBOT
Group G10B - ELECTRONIC PROJECT
Slide 4.5
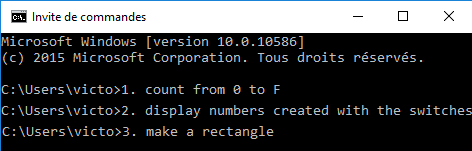
Counting from 0 to F
Programming the robot
The clock's frequency is 50MHz. Therefore, when it has done 50 000 000 cycles, that means a second has passed.

The program simply counts how many cycles the clock has done and when it reaches 50 000 000, it knows a second has passed.
How to count? Useful in many of our programs
Group G10B - ELECTRONIC PROJECT
Slide 4.6
Programming the robot
How the motor works
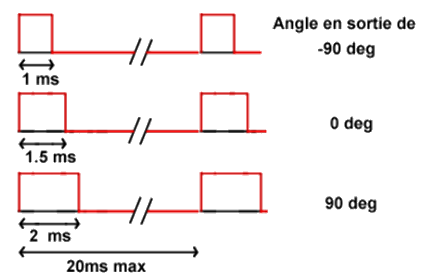
1 ms of high level makes the robot goes backward
1.5 ms of high level makes the robot stay put
2 ms of high level makes the robot goes forward
Group G10B - ELECTRONIC PROJECT
Slide 4.7
Programming the robot
How the motor works


The two motors given have opposite turning sense !
Examples: Each line represents the power given to a motor
1 ms
2 ms
Going forward
Go backward
1 ms
Group G10B - ELECTRONIC PROJECT
Slide 4.8
Programming the robot
Making a rectangle
In this program, the robot can be in 4 different states.
The first state is the one which makes the robot stop
1
2
The second state is for the smallest part of the rectangle
3
The third state is for the longest part of the rectangle
4
The fourth state makes the robot turn and counts how many states it's been through to help him know, which state it has to go to next.
Creating the captors
Group G10B - ELECTRONIC PROJECT
Slide 5.1
Creating the captors
Objectives of this part
Group G10B - ELECTRONIC PROJECT
Slide 5.2
Creating the captors
Learn how to use captors


Make electrical
circuits and
analyze them
Weld everything
on the card
Make simulations
Group G10B - ELECTRONIC PROJECT
Slide 5.3
Creating the captors
Microphone

We used an electret microphone
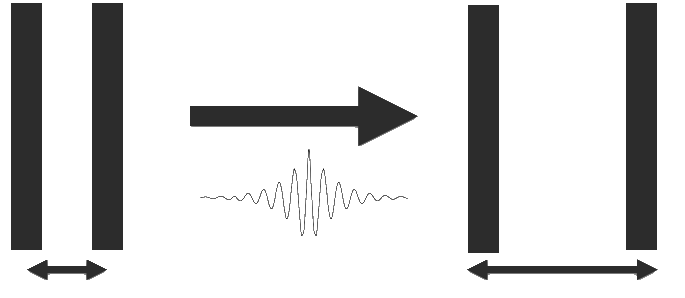
hit by a soundwave
Distance D1
Distance D2>D1
C= ε S/D
changing D changes the capacity
Group G10B - ELECTRONIC PROJECT
Slide 5.4
Creating the captors
Microphone

Group G10B - ELECTRONIC PROJECT
Slide 5.5
Creating the captors
Microphone
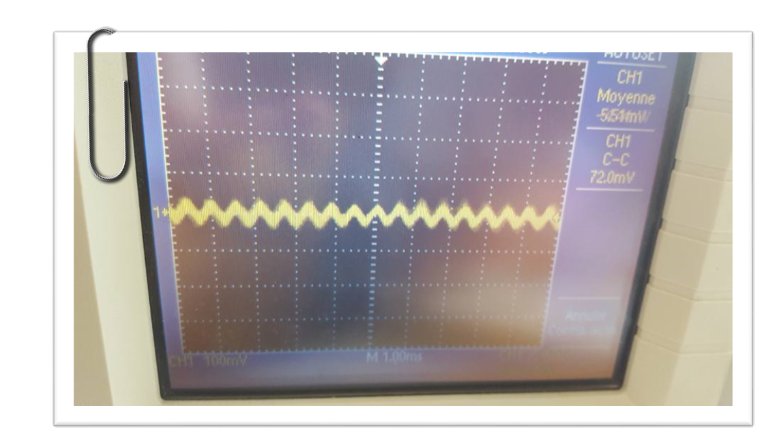
As we can see, the signal is too small
We must amplify it.
Group G10B - ELECTRONIC PROJECT
Slide 5.6
Creating the captors
Amplifier
Group G10B - ELECTRONIC PROJECT
Slide 5.7
Creating the captors
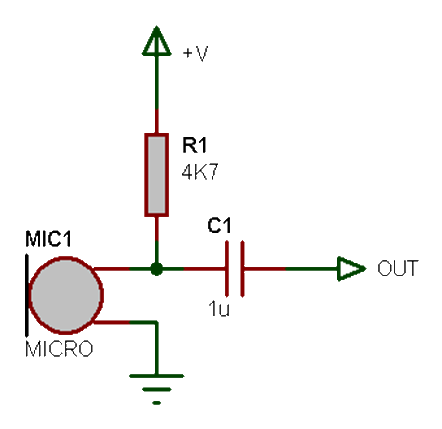
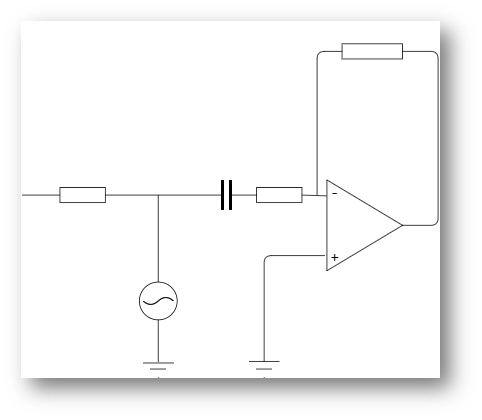
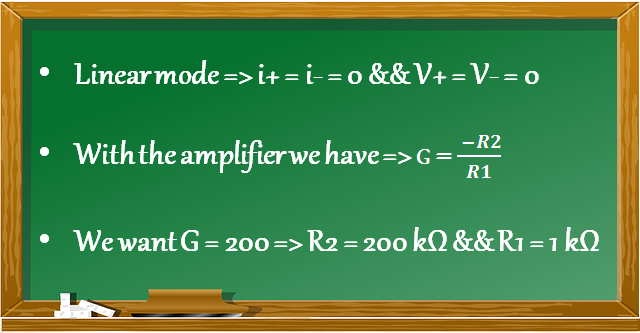
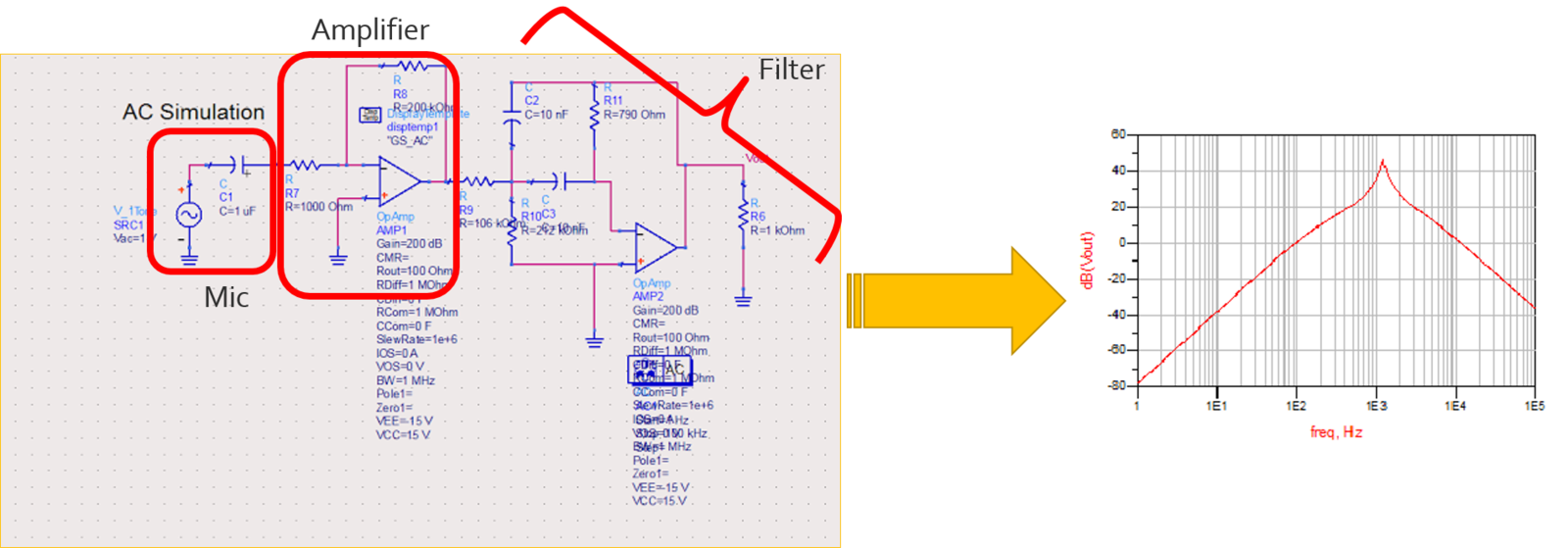
Amplifier
Our circuit :
The signal is now amplified, but the robot must only receive sounds that have a specific fequency.
We need to use a filter
Group G10B - ELECTRONIC PROJECT
Slide 5.8
Creating the captors
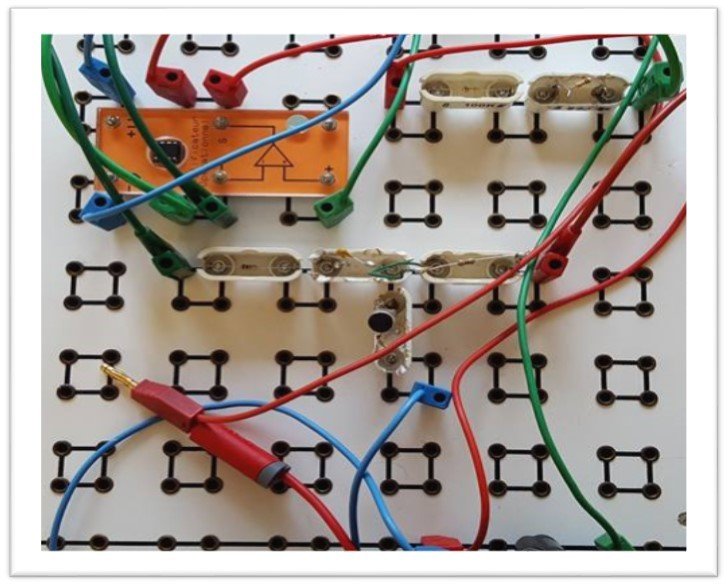
Filter
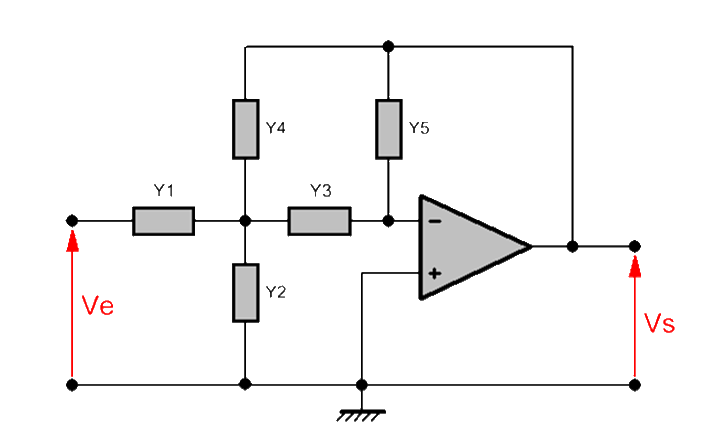
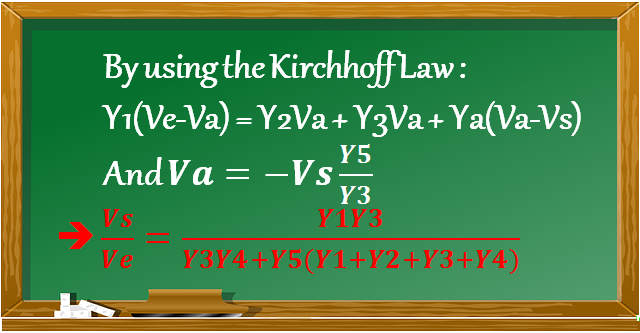
RAUCH FILTER
Group G10B - ELECTRONIC PROJECT
Slide 5.9
Creating the captors
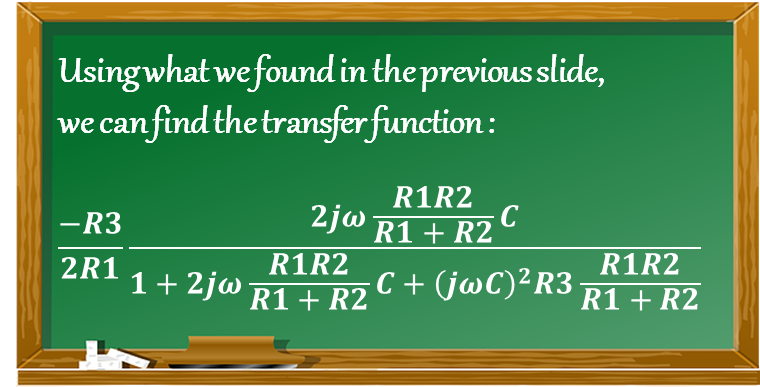
Filter
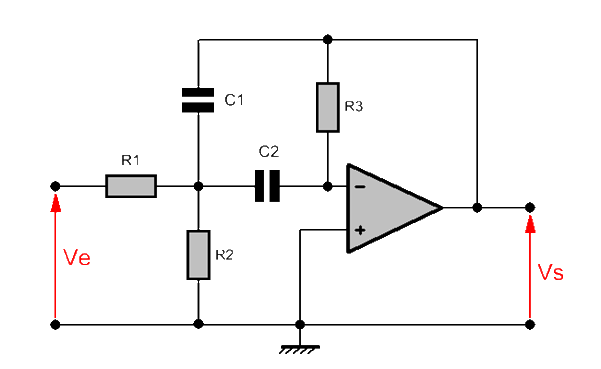
RAUCH BANDPASS FILTER
Group G10B - ELECTRONIC PROJECT
Slide 5.10
Creating the captors
Filter
Group G10B - ELECTRONIC PROJECT
Slide 5.11
Creating the captors
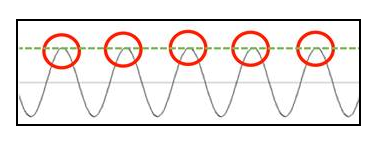
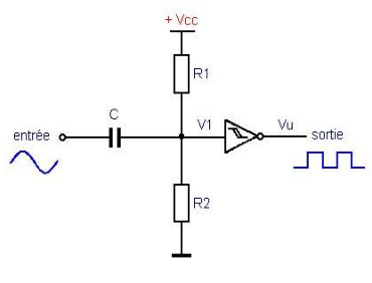
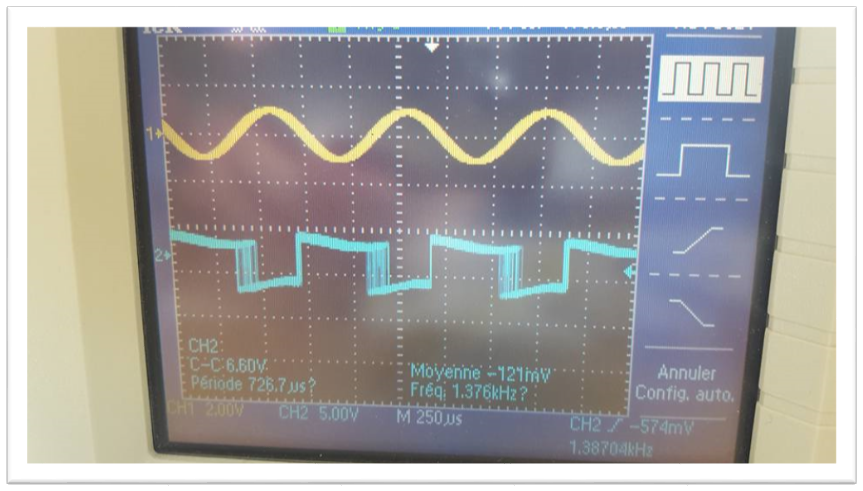
Trigger
The robot does not understand an electric signal. We must convert it to a binary sequence. To do that, we need to use a trigger...
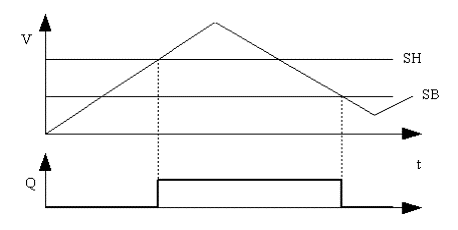
Above SH => equals 1
Below SH => equals 0
Group G10B - ELECTRONIC PROJECT
Slide 5.12
Creating the captors
Trigger
Slide 5.13
Creating the captors
Group G10B - ELECTRONIC PROJECT
Trigger
Slide 5.14
Creating the captors
Group G10B - ELECTRONIC PROJECT
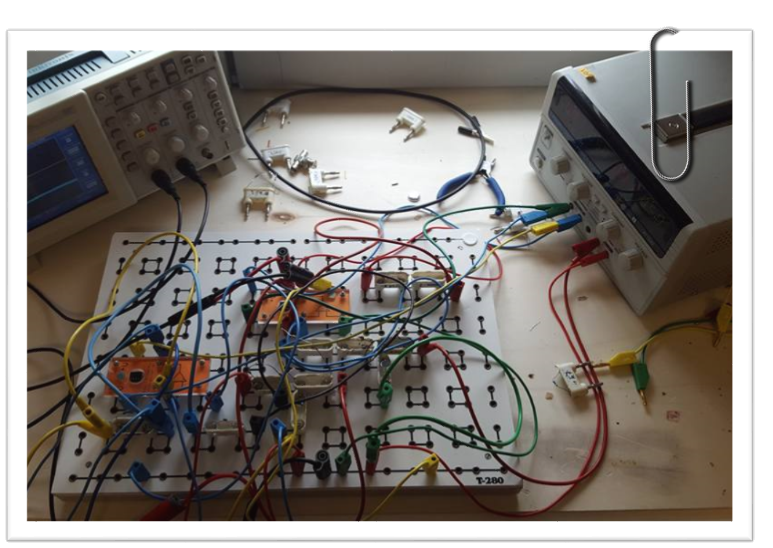
SimulatioN
We also used a software in order to check if everything would work.
It is called « Advanced Design System (ADS) »
Slide 5.15
Creating the captors
Group G10B - ELECTRONIC PROJECT
SimulatioN
Slide 5.16
Creating the captors
Group G10B - ELECTRONIC PROJECT
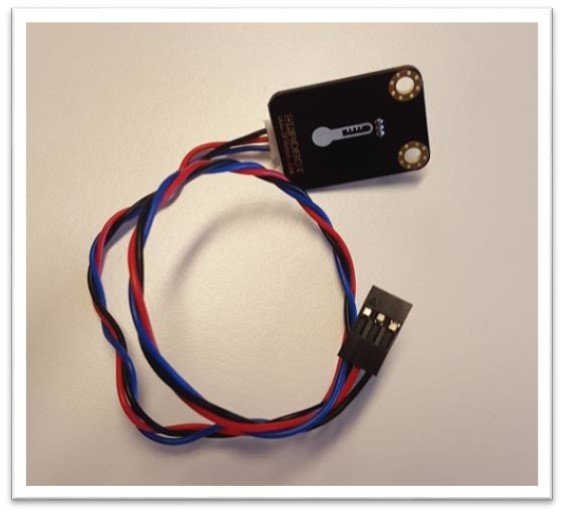
Secondary Sensor
We chose the temperature captor as our secondary sensor
Slide 5.18
Creating the captors
Group G10B - ELECTRONIC PROJECT
Display
Conclusion
Group G10B - ELECTRONIC PROJECT
Slide 6.1
Conclusion

Thanks for listening!